1
Изобретение относится к машинам для прокладки и очистки гидролесомелиоративных каналов и может быть использовано в лесном хозяйстве.
Цель изобретения - увеличение производительности и расширение области эффективного применения за счет использования сменных рабочих органов при выполнении работы при движении машинь передним и задним ходом.
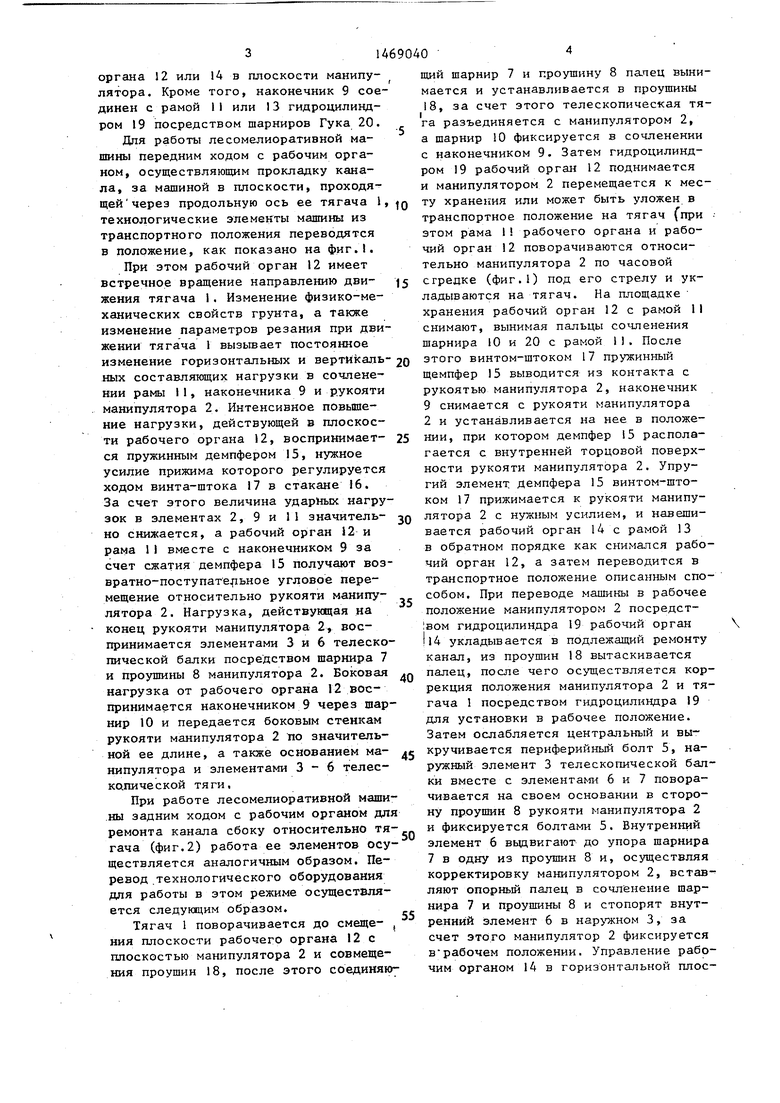
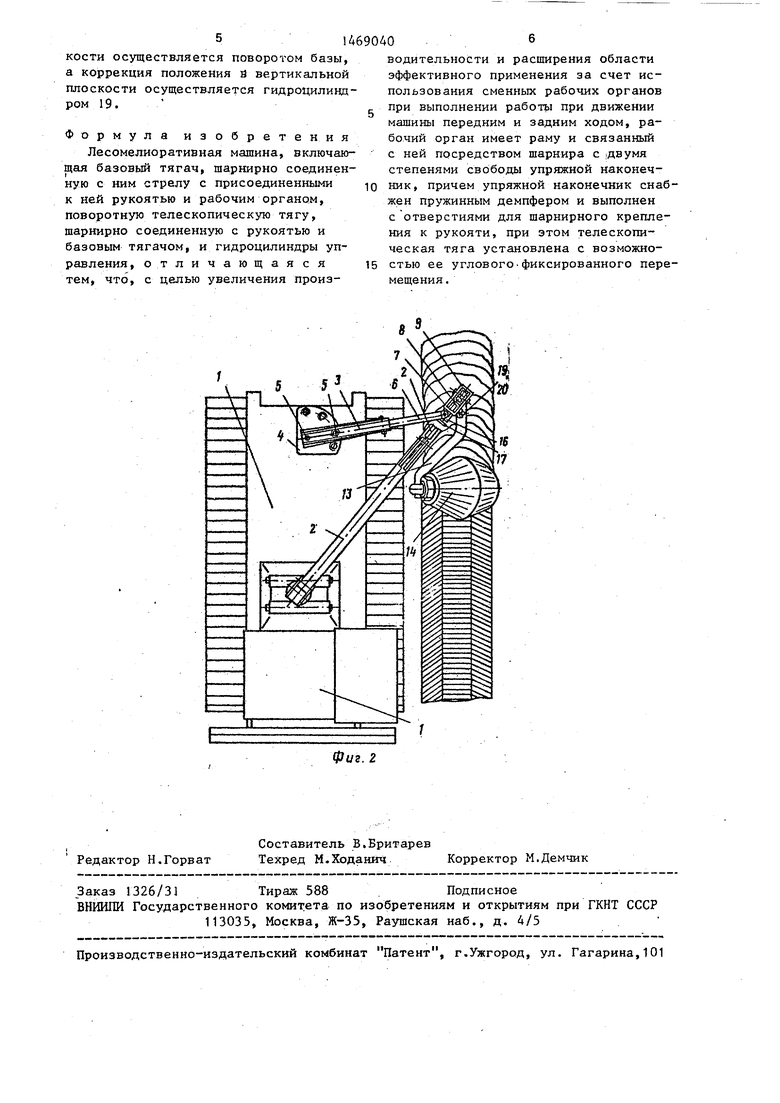
На фиг.1 показана машина с фрезерным рабочим органом, расположенным по продольной оси ее базы, для работы передним ходом, вид сбоку} на фиг.2 - машина при положении фрезы сбоку базы машины для работы задним ходом, вид сверху.
Лесомелиоративная машина В1слючает базовый тягач l, оборудованный гидроманипулятором 2, включанвдим стрелу и рукоять. На задней части тягача i установлена телескопическая тяга, на- ружньй элемент 3 которой закреплен на тягаче 1 посредством плоского основания 4, выполненного в виде сектора, в центре которого и по периферии на дуге окружности, концентричной данному центру, выполнены ре зьбовые отверстия для крепления болтами 5 наружного элемента 3 балки, а внутренний вьщвигагащийся элемент 6 телескопической тяги снабжен шарниром Гука 7, посредством которого наруж
ный элемент 3 тяги соединяется с рукоятью манипулятора 2, имеющей проушины 8. К рукояти манипулятора 2 посредством шарнирно закрепленного на ней упряжного наконечника 9, имеющего на конце шарнир 10 с двумя степенями свободы, присоединена рама 11 рабочего органа 12 (фиг.1) или рама 3 рабочего органа 14 (фиг.2). Наконечник 9 имеет плоские внутренние поверхности, боковые из которых прилегают к боковым наружным поверхностям рукояти манипулятора 2, а торцовые с расходятся под большим углом, чем соответствукщие наружные поверхности рукояти манипулятора, и, кроме того, упряжной наконечник 9 снабжен пружинным демпфером 15, расположенным в продольной плоскости манипулятора в стакане 16, .который для регулирования усилия сжатия и ввода в рабочее положение упругого элемента демпфера 15 снабжен винтом-штоком 17. Шарнир 5 10 имеет ОСЬ вращения, перпендикулярную плоскости манипулятора 2 в сочленении с рамой 11 рабочего органа 12 (фиг.1) или, например, рамой 13 рабочего органа (фиг.2) и лежащую в плос- 3Q КОСТИ манипулятора 2 в сочленении с наконечником 9, причем на элементах этого сочленения шарнира 10 имеются ,проушины 18, которые совмещаются при расположении центра тяжести рабочего
15
щий шарнир 7 н проушину 8 папец вынимается и устанавливается в проушины 18, за счет этого телескопическая тяга разъединяется с манипулятором 2, а шарнир 10 фиксируется в сочленении с наконечником 9. Затем гидроцилиндром 19 рабочий орган 12 поднимается и манипулятором 2 перемещается к месту хранения или может быть уложен в транспортное положение на тягач (при этом рама I рабочего органа и рабочий орган 12 поворачиваются относительно манипулятора 2 по часовой сгредке (фиг.1) под его стрелу и укладываются на тягач. На площадке хранения рабочий орган 12 с рамой II снимают, вынимая пальцы сочленения шарнира 10 и 20 с рамой I1. После
органа 12 или 14 в плоскости манипулятора. Кроме того, наконечник 9 соединен с рамой 1I или I3 гидроцилиндром 19 посредством шарниров Гука 20. Дпя работы лесомелиоративной машины передним ходом с рабочим органом, осуществляющим прокладку канала, за машиной в плоскости, проходящей через продольную ось ее тягача 1, |Q технологические элементы машины из транспортного положения переводятся в положение, как показано на фиг.1. При этом рабочий орган 12 имеет встречное вращение направлению движения тягача 1. Изменение физико-механических свойств грунта, а также изменение параметров резания при движении тягача 1 вызывает постоянное
изменение горизонтальных и вертикаль-20 этого винтом-штоком 17 пружинный ных составляющих нагрузки в сочлене- щемпфер 15 выводится из контакта с НИИ рамы И, наконечника 9 и рукояти рукоятью манипулятора 2, наконечник манипулятора 2. Интенсивное повыше- 9 снимается с рукояти манипулятора ние нагрузки, действующей в плоское- 2 и устанавливается на нее в положе- ти рабочего органа 12, воспринимает- 25 нии, при котором демпфер 15 распола- ся пружинным демпфером 15, нужное гается с внутренней торцовой поверх- усилие прижима которого регулируется ходом винта-штока 17 в стакане 16. За счет этого величина ударных нагрузок в элементах 2, 9 и П значитель- JQ но снижается, а рабочий орган 12 и рама 1I вместе с наконечником 9 за счет сжатия демпфера 15 получают возвратно-поступательное угловое перемещение относительно рукояти манипулятора 2. Нагрузка, действующая на конец рукояти манипулятора 2, воспринимается элементами 3 и 6 телескопической балки посредством шарнира 7 и проушины 8 манипулятора 2. Боковая Q нагрузка от рабочего органа 12 воспринимается наконечником 9 через шарнир 10 и передается боковым стенкам рукояти манипулятора 2 по значительной ее длине, а также основанием ма- 45 кручивается периферийный болт 5, на- нипулятора и элементами 3-6 телес- ружный элемент 3 телескопической бал- капической тяги,
При работе лесомелиоративной маши- .ны задним ходом с рабочим органом для ремонта канала сбоку относительно тя- гача (фиг.2) работа ее элементов осуществляется аналогичным образом. Перевод технологического оборудования для работы в этом режиме осуществляется следующим образом.
Тягач 1 поворачивается до смещения плоскости рабочего органа 12 с плоскостью манипулятора 2 и совмещения проушин 18, после этого соединяю35
55
ности рукояти манипулятора 2. Упругий элемент Демпфера 15 винтом-штоком 17 прижимается к рукояти манипулятора 2 с нужным усилием, и навешивается рабочий орган 14 с рамой 13 в обратном порядке как снимался рабочий орган 12, а затем переводится в транспортное положение описанным способом. При переводе машины в рабочее положение манипулятором 2 посредст- 1вом гидроцилиндра 19 рабочий орган l4 укладывается в подлежащий ремонту канал, из проушин 18 вытаскивается палец, после чего осуществляется коррекция положения манипулятора 2 и тягача 1 посредством гидроцилиндра 19 для установки в рабочее положение. Затем ослабляется центральный и выtr f
ки вместе с элементами 6 и 7 поворачивается на своем основании в сторону проушин 8 рукояти манипулятора 2 и фиксируется болтами 5. Внутренний элемент 6 вьщвигают до упора шарнира 7 в одну из проушин 8 и, осуществляя корректировку манипулятором 2, встав- ляют опорный палец в сочленение шарнира 7 и проушины 8 и стопорят внутренний элемент 6 в наружном 3, за счет этого манипулятор 2 фиксируется В рабочем положении. Управление рабочим органом 14 в горизонтальной плос5
щий шарнир 7 н проушину 8 папец вынимается и устанавливается в проушины 18, за счет этого телескопическая тяга разъединяется с манипулятором 2, а шарнир 10 фиксируется в сочленении с наконечником 9. Затем гидроцилиндром 19 рабочий орган 12 поднимается и манипулятором 2 перемещается к месту хранения или может быть уложен в транспортное положение на тягач (при этом рама I рабочего органа и рабочий орган 12 поворачиваются относительно манипулятора 2 по часовой сгредке (фиг.1) под его стрелу и укладываются на тягач. На площадке хранения рабочий орган 12 с рамой II снимают, вынимая пальцы сочленения шарнира 10 и 20 с рамой I1. После
0 этого винтом-штоком 17 пружинный щемпфер 15 выводится из контакта с рукоятью манипулятора 2, наконечник 9 снимается с рукояти манипулятора 2 и устанавливается на нее в положе- 5 нии, при котором демпфер 15 распола- гается с внутренней торцовой поверх- Q Q 45 кручивается периферийный болт 5, на- ружный элемент 3 телескопической бал-
5
ности рукояти манипулятора 2. Упругий элемент Демпфера 15 винтом-штоком 17 прижимается к рукояти манипулятора 2 с нужным усилием, и навешивается рабочий орган 14 с рамой 13 в обратном порядке как снимался рабочий орган 12, а затем переводится в транспортное положение описанным способом. При переводе машины в рабочее положение манипулятором 2 посредст- 1вом гидроцилиндра 19 рабочий орган l4 укладывается в подлежащий ремонту канал, из проушин 18 вытаскивается палец, после чего осуществляется коррекция положения манипулятора 2 и тягача 1 посредством гидроцилиндра 19 для установки в рабочее положение. Затем ослабляется центральный и вы
этого винтом-штоком 17 пружинный щемпфер 15 выводится из контакта с рукоятью манипулятора 2, наконечник 9 снимается с рукояти манипулятора 2 и устанавливается на нее в положе- нии, при котором демпфер 15 распола- гается с внутренней торцовой поверх- кручивается периферийный болт 5, на- ружный элемент 3 телескопической бал-
tr f
ки вместе с элементами 6 и 7 поворачивается на своем основании в сторону проушин 8 рукояти манипулятора 2 и фиксируется болтами 5. Внутренний элемент 6 вьщвигают до упора шарнира 7 в одну из проушин 8 и, осуществляя корректировку манипулятором 2, встав- ляют опорный палец в сочленение шарнира 7 и проушины 8 и стопорят внутренний элемент 6 в наружном 3, за счет этого манипулятор 2 фиксируется В рабочем положении. Управление рабочим органом 14 в горизонтальной плоскости осуществляется поворотом базы, а коррекция положения а вертикальной плоскости осуществляется гидроцилинц- ром 19.
Формула изобретения
Лесомелиоративная машина, включающая базовый тягач, шарнирно соединенную с ним стрелу с присоединенными к ней рукоятью и рабочим органом, поворотную телескопическую тягу, шарнирно соединенную с рукоятью и базовым тягачом, и гидроцилиндры управления, отличающаяся тем, что, с целью увеличения произ
водительности и расширения области эффективного применения за счет использования сменных рабочих органов при выполнении работь при движении машины передним и задним ходом, рабочий орган имеет раму и связанный с ней посредством шарнира с двумя степенями свободы упряжной наконечник, причем упряжной наконечник снабжен пружинным демпфером и выполнен с отверстиями для шарнирного крепления к рукояти, при этом телескопическая тяга установлена с возможностью ее углового-фиксированного перемещения .
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2242115C2 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2251479C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 1998 |
|
RU2135347C1 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ | 1998 |
|
RU2141755C1 |
| Устройство для соединения сменного рабочего органа с рукоятью манипулятора | 1984 |
|
SU1247470A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Манипулятор лесозаготовительной машины | 1979 |
|
SU791517A1 |
| Манипулятор | 1980 |
|
SU897495A1 |
Изобретение относится к машинам для прокладки и очистки гидролесомелиоративных каналов и Может быть ис- пользовано в лесном хозяйстве. Цель изобретения - увеличение производительности и расширение области эффективного применения за счет использования сменных рабочих органов при выполнении работы при движении машины передним и задним ходом. Лесомелиоративная машина состоит из базового тягача (ВТ) 1, стрелы с рукоятью, образующих манипулятор (М) 2. Телескопическая тяга с наружным элементом (НЭ) 3 закреплена основанием 4 на ВТ 1. Основание 4 выполнено в виде сектора с резьбовыми отверстиями по
Фиг. г
| 0 |
|
SU355308A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рабочий орган для очистки каналов | 1982 |
|
SU1079772A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
