.Изобретение относится к средства 5 неразрушающего контроля, основанным на использовании свойств физических полей, в частности к электрическим cчeтнo-peгиcтpиpyющи(l устройствам, и может быть использовано с преимуществом в водных и полупроводящих средах для учета движущихся объектов как живой, так и неживой природы.
Цель изобретения - повышение чувствительности устройства.
На чертеже представлена блок-схема устройства для счета движущихся объектов.
Устройство содержит генератор 1 питающего напряжения, синтезатор 2, операционный усилитех ь 3, датчик 4, усилитель 5,.детектор 6, фильтр 7 низких частот,модулятор 8, первый 9 и второй 10 согласованные фильтры, первый II и второй 12 квадраторы, блок 13 коррекций, детектор 14, компаратор 15, дифференцирующий элемент 16, ре- гиЬтратор 17,
Генератор 1 питающего напряжения вырабатывает задающий сигнал, который в зависимости от применяемого вида сложного сигнала может быть синусо
идальной формы в случае, если сложный зо ика 4. В результате в зоне контроля
между электродами датчика 4 образуется квазистационарное электромагнитное поле токов проводимости. Сигнал на выходе усилителя 5 представляет собой тот же сложньш сигнал, однако его амплитуда и фаза связаны с проводимостью участка среды между электродами датчика 4, т.е. происходит модуляция сигнала, обусловленная как флук- туациями проводимости среды, связанными с изменениями температуры и состава, так и наличием объекта, пересекающего зону контроля. Далее сложньш сигнал с выхода усилителя 5 поступает на вход детектора 6 и согласованного фильтра 9. Детектор 6 преобразует сложный сигнал в однополяр- ный уровень напряясения, после чего фильтр 7 низких частот вьщеляет низкочастотную часть спектра его огибающей, которая обусловлена низкочастотными флуктуациями проводимости контролируемого участрса йреды, вызванными измененияьш температуры и состава среды,.
сигнал представляет собой дискретный фазомодулированный сигнал (ДФМ) или сигнап нелинейной частотной модуляцией (ЛЧМ), может быть прямоугольной формы в случае, если сложный сигнал является сигналом с дискретной частотной модуляцией (ДЧМ) с постоянной или переменной структурой. Средняя частота выбирается из условия распространения электромагнитных волн в водных и полупроводящих средах и составляет порядка одного килогерца.
Синтезатор 2 сложного сигнала формирует сложный шумоподобный сигнал с базой 1 , где Т - длительность, F - полоса спектра сигнала. Условие В 1 обеспечивается за счет сложного закона формирования (модуляции) сигнала, например ДФМ, ДЧМ, ЛЧМ и т.д. Кроме.того, сложньш сигнал должен обладать малым: коэффициентом затухания в полупроводящей, в частности, в водной среде, а огибающая его автокорреляционной функции (АКФ) должна иметь как можно более узкий центральный пик и относительно . малые боковые остатки.
Датчик 4, состоящий из пары электродов , служит для создания в контроQ
о5
5
лируемой зоне переменного электрического поля.
Согласованные фильтры 9 и 10 фор- выходной сигнал, который до постоянного множителя совпадает с корреляционной функцией входного сигнала, при этом структура фильтров, их характеристики и возможные пути реализации определяются видом обрабатываемого сложного сигнала.
Устройство работает следующим образом.
Импульсы тактовой частоты поступают на вход синтезатора 2 сложного сигнала, осзпцествляя синхронизацию его работы. На выходе синтезатора 2 сложного сигнала формируется широкополосный сложный, например, ДЧМ-сиг- налд частота которого может изменяться в пределах от 10 Гц до десяти килогерцS а период повторения в пределах от 0,1 с до десяти секунд, что обеспечивает малое затухание сложного ЧМ-сигнала в водной среде, кроме того, база сигнала составит - 10 . Далее сложный ДЧМ-сиг- нал усиливается операционным усилителем 3 и поступает на электроды 4. В результате в зоне контроля
между электродами датчика 4 образуется квазистационарное электромагнитное поле токов проводимости. Сигнал на выходе усилителя 5 представляет собой тот же сложньш сигнал, однако его амплитуда и фаза связаны с проводимостью участка среды между электродами датчика 4, т.е. происходит модуляция сигнала, обусловленная как флук- туациями проводимости среды, связанными с изменениями температуры и состава, так и наличием объекта, пересекающего зону контроля. Далее сложньш сигнал с выхода усилителя 5 поступает на вход детектора 6 и согласованного фильтра 9. Детектор 6 преобразует сложный сигнал в однополяр- ный уровень напряясения, после чего фильтр 7 низких частот вьщеляет низкочастотную часть спектра его огибающей, которая обусловлена низкочастотными флуктуациями проводимости контролируемого участрса йреды, вызванными измененияьш температуры и состава среды,.
При этом постоянная времени фильтра 7 низких частот выбирается таким образом, что приращения амплитуды сложного сигнала, вызванные пересеченнем зоны контроля движущимся объектом, не изменяют уровень напряжения на его выходе. Уровень напряжения с выхода -фильтра ,7 низких частот, амплитуда которого пропорциональна низкочастотным флуктуациям проводимости среды, поступает на управляющий вход модулятора 8, на второй вход которого подается исходный шумоподобный сигнал с выхода синтезатора 2, Таким образом, на выходе модулятора 8 амплитуда сложного сигнала изменяется только под воздействием низкочастотных флуктуацией проводимости контролируемого участка среды и не зависит от наличия в зоне движзпцегося объекта. Далее сигналы с выходов усилителя 5 и модулятора 8 проходят оптимальную обработку согласованными фильтрами 9 и 10, В результате вычисляется АКФ сложного. Квадраторы 1 и 12 преобразуют АКФ в однополярный си нал с узким центральным пиком. За счет временного сжатия при обработке согласованным фильтром длительность центрального пика Т/Б, где Т - период повторения, В - база сложного сигнала, при этом амплитуда центрального АКФ в В раз вьше амплитуды исходного сложного сигнала. Приращения амплитуды сложного сигнала, например при прохождении объекта между электродами датчика 4 вызьшают в V раз большие приращения амплитуды пика АКФ и порядка В раз большие приращения амплитуды центрального пика напряжения на выходе квадратора.
Таким образом, применение согласованной фильтрации сложных шумоподоб- ньгх сигналов позволяет получить вы- игрьш в чувствительности пропорциональной базе В широкополостного сложного сигнала по сравнению с узкополосным синусоидальным сигналом.
В блоке 13 коррекции из сигнала с выхода квадратора 5 вычитается сигнал с выхода квадратора 10, т.е. производится компенсация низкочастотных составляющих, связанных с флуктуация5
28833
ми проводимости -среды за счет изменений температуры и состава. При этом сигнал на выходе блока 13 коррекции представляет собой последовательность пиков напряжения, амплитуда которых пропорциональна приращению проводимости участка среды между электродами датчика 4 при воздействии движущегося
10 объекта. Далее детектор 14 выделяет огибающую пиков, компаратор 15 формирует прямоугольный импульс при превышении сигналом с выхода детектора 14 операционного порога, дифферен цирую15 щий элемент 16 формирует короткий импульс счета, который регистрируется в блоке 17.
Формула изобретения Устройство для счета движущихся
0 объектов, содержащее генератор питающего напряжения, датчик, операционный усилитель, усилитель, первый детектор, блок коррекции, компаратор, выход которого через дифференцирую5 щий -элемент подключен к регистратору, отличающееся тем, что, с целью повышения чувствительности устройства, в него введены синтезатор, фильтр низких частот, модулятор, пер0 вьш и второй согласованные фильтры, первый и второй квадраторы, второй детектор, выход генератора питающего напряжения через синтезатор соединен с первым входом модулятора и вхо. дом операционного усилителя, выход которого подключен к входу датчика, выход которого соединен с входом усилителя, выход которого подключен к входу первого согласованного фильтра
0 и через последовательно соединенные первьй детектор и фильтр низких частот к второму входу модулятора, выход которого через последовательно соеди- .ненные второй согласованный фильтр и
5 второй квадратор подключен к первому входу блока коррекции, выход первого согласованного фильтра через первый квадратор подключен к второму входу блока коррекции, выход которого чеQ рез второй детектор соединен с входом компаратора.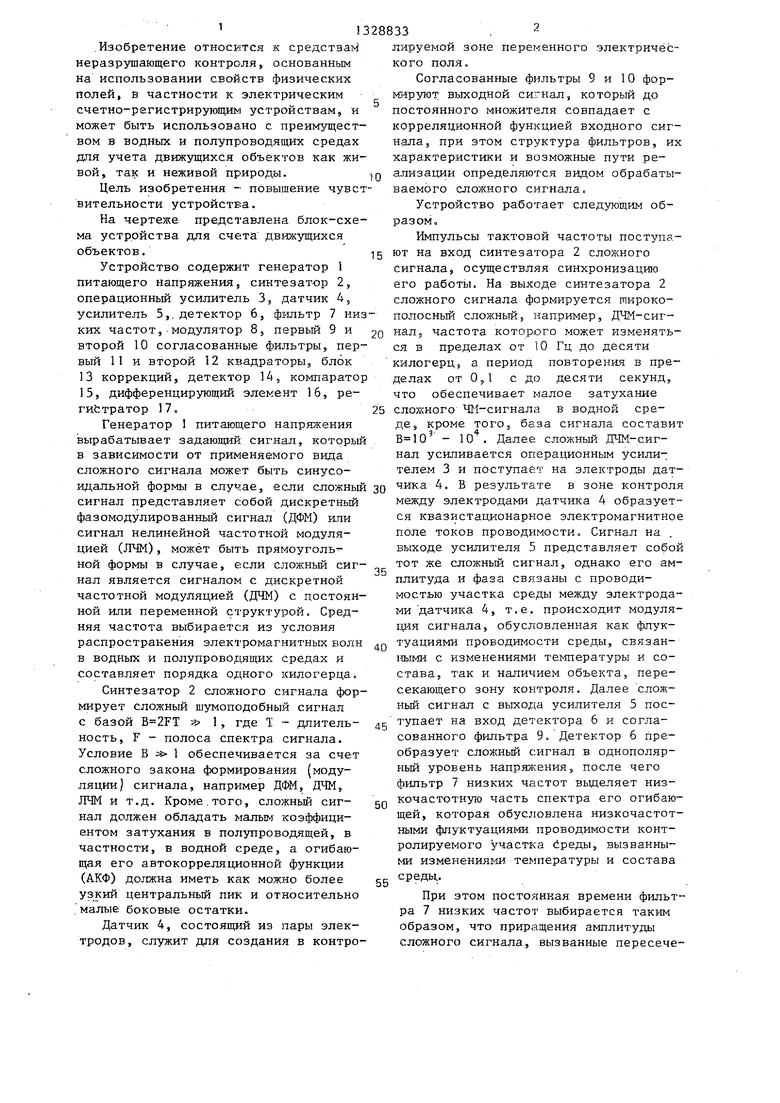
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для учета движущихся объектов | 1985 |
|
SU1278908A1 |
| ЛИНИЯ РАДИОСВЯЗИ | 2001 |
|
RU2193278C1 |
| Устройство для счета движущихся объектов | 1986 |
|
SU1381556A1 |
| ПРИЕМНИК РАДИОИМПУЛЬСНОГО СИГНАЛА | 2022 |
|
RU2797257C1 |
| Устройство для учета движущихся объектов | 1981 |
|
SU1012292A1 |
| Диэлькометрический измеритель концентрации пластификатора в пленочных материалах | 1982 |
|
SU1081566A1 |
| Устройство для счета движущихся объектов | 1986 |
|
SU1401497A2 |
| Устройство для счета движущихся объектов | 1985 |
|
SU1312623A1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| Способ дистанционного контроля и диагностики состояния конструкций и инженерных сооружений и устройство для его осуществления | 2018 |
|
RU2685578C1 |
Изобретение относится к средствам неразрушающего контроля, основанным на использовании свойств физических полей, в частности к электрическим счетно-регистрирующим устройствам, и может быть использовано с преимуществом в водных и полупроводящих средах дпя учета движущихся объектов живой и неживой природы. Цель изобретения - повышение чувствительности устройства. Устройство содержит генератор 1 питающего напряжения, синтезатор 2, операционный усилитель 3, датчик 4, усилитель 5, детектор 6, фильтр 7 низких частот, модулятор 8, первый 9 и второй 10 согласованные фильтры, первый 11 и второй 12 квадраторы, блок 13.коррекции, детектор 14, компаратор 15, дифференцирующий элемент 16, регистратор 17. Чувствительность устройства повьщ1ается благодаря додетекторной обработке сигнала с датчика при помощи согласованного фильтра. 1 ил. § (/
| Устройство для учета движущихся объектов | 1981 |
|
SU1012292A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для счета движущихся объектов | 1984 |
|
SU1231522A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
