1
Изобретение относится к средства неразрушающего контроля, основанным на использовании свойств физических полей, в частности к электрическим счетно-регистрирующим устройствам, и может быть использовано в водных и полупроводящих средах для учета движущихся объектов как живой, так и неживой природы.
Целью изобретения является повышение точности счета движущихся обь тов за счет уменьшения влияния шумо электродных датчиков и окружающей среды путем применения амплитудно- фазовой коррекляционной обработки сигналов.
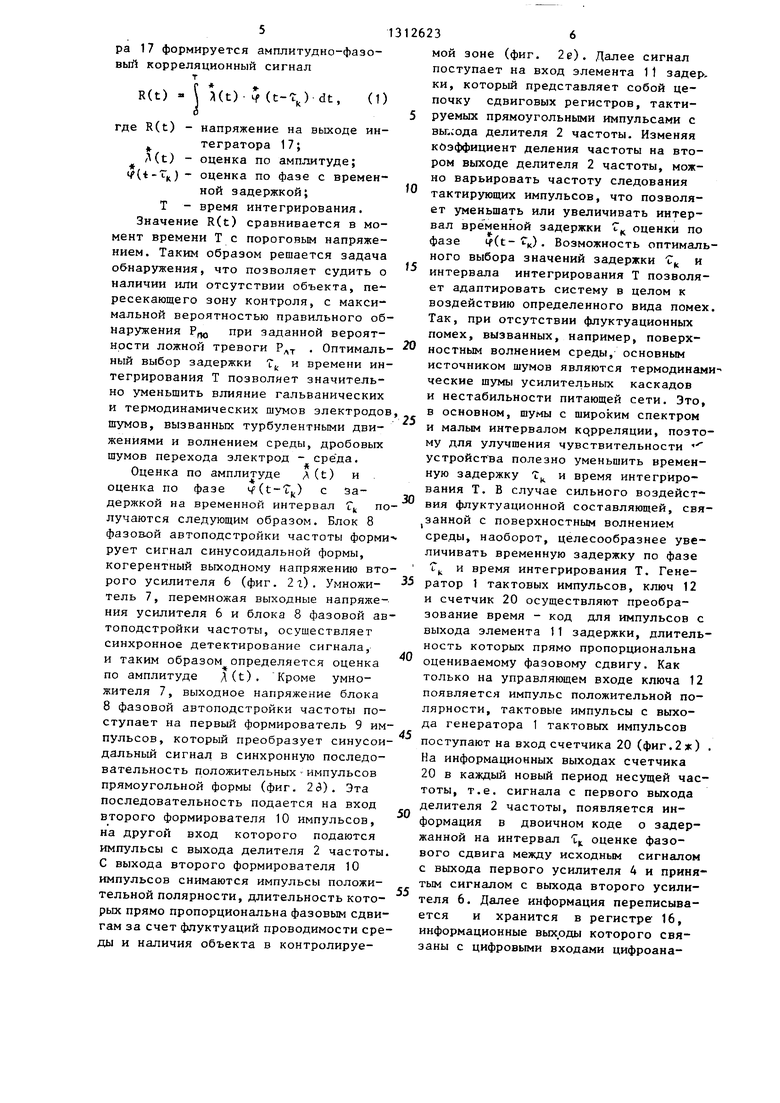
На фиг. I представлена функционаная схема предлагаемого устройства на фиг. 2 - эпюры напряжений на выходах отдельных блоков устройства; на фиг. 3 - вариант включения первого усилителя, электродов датчика и второго усилителя с помощью согласующих трансформаторов.
Устройство содержит генератор 1 тактовых импульсов, делитель 2 частоты, фильтр 3, первый усилитель 4, датчик 5, второй усилитель 6, умножитель 7, блок 8 фазовой автоподстройки частоты, первый формировате 9 импульсов, второй формирователь 1 импульсов, элемент 11 задержки, клю 12, первый счетчик 13, источник 14 опорного напряжения, цифроаналоговы преобразователь 15, регистр 16, интегратор 17 у компаратор 18, дифферецирующий элемент 19, второй счетчик 20.
Генератор 1 служит для создания импульсного напряжения прямоугольно формы, при этом частота следования прямоугольных импульсов выбирается из условия требуемой точности определения фазовых сдвигов, вызванных прохождением объекта, и лежит в интервале от сотен килогерц до десятков мегагерц.
Делитель 2 частоты служит для формирования прямоугольных импуль- срв низкой частоты, синхронных импульсам генератора 1 прямоугольных импульсов.
Фильтр 3 служит для формирования низкочастотного переменного напряжения синусоидальной формы из импульсов прямоугольной формы с выхода делителя 2 частоты. При этом фильтр 3 настоаивается на первую гармонику
о
0
5
с
0
5
0
5
0
5
последовательности прямоугольных импульсов и реализуется по известным схемам активных RC-фильтров на базе операционных усилителей серий 140, 153.
Первый усилитель 4 служит для усиления синусоидального сигнала с выхода фильтра 3 и согласования выход- мого сопротивления системы с сопротивлением электрод-среда и может быть выполнен на транзисторах по известным схемам линейных усилителей мощности или преобразователей напряжения в ток, при этом желательно, чтобы согласование с электродами выполнялось при помощи специальных со- гласующих трансформаторов (фиг.З).
Датчик 5, состоящий из пары электродов, служит для создания в контролируемой зоне переменного электрического поля. В качестве электродов могут быть использованы металлические или графитовые стержни, пластины и т.д.
Второй усилитель 6 служит для усиления синусоидального сигнала с датчика 5 и согласования сопротивления перехода среда - электрод с входным сопротивлением приемной части устройства и реализуется- по известным схемам на базе транзисторов или малощу- мящих операционных усилителей, при этом предпочтительнее сигнал с выхода датчика 5 подавать на вход второго усилителя 6 также при помощи специального согласующего трансформатора .
Умножитель 7 служит для перемножения сигнала с выхода второго усилителя 6 и когерентного опорного сигнала с выхода блока 8 фазовой автоподстройки частоты.
Блок 8 фазовой автоподстройки частоты формирует опорный сигнал, когерентный сигналу с выхода второго усилителя 6.
Первый формирователь 9 импульсов преобразует сигнал с выхода системы 8 фазовой автоподстройки частоты в однополярные прямоугольные импульсы.
Второй формирователь 10 импульсов формирует прямоугольные импульсы положительной полярности, длительность которых прямо пропорциональна разности фаз между сигналом с первого выхода делителя 2 частоты и сигналом с выхода первого формирователя 9 импульсов, и реализуется, например,
при помощи RS-триггеров серий 155, 134 и т.д., при этом один из сигналов подается на вход К, а другой - на вход S.
Элемент 11 задержки обеспечивает временную задержку прямоугольных импульсов с выхода второго формирователя 10 импульсов, обуславливая тем самым интервал корреляции t ,
Ключ 12 коммутирует выход генератора 1 тактовых импульсов с входом счетчика 20 в момент прихода положительного импульса на управляющий вход выполняя таким образом функцию логического умножения И.
Счетчик 20 служит для счета импулсов тактовой частоты с выхода логичекого ключа 12, число которых пропорционально разности фаз опорного сигнала с первого выхода делителя 2 час тоты и сигнала с выхода формировател 9 прямоугольных импульсов.
Источник 14 опорного напряжения формирует однополярный опорный уровень напряжения, пропорциональный среднему уровню выходного напряжения умножителя 7, при этом источник 14 опорного напряжения реализуется по известным схемам активных фильтров низких частот, постоянная времени которых выбирается такой, что прохождение объекта между электродами датчика 5 практически не вызывает изменения уровня напряжения на выходе, а коэффициент пропорциональности определяется из соотношения условных вероятностей правильного обнаружения Р.,,, по вероятности ложной трево
ги Р, .
Цифроаналоговый преобразователь
15служит для перемножения аналогового сигнала с выхода умножителя 7 и цифрового сигнала с регистра
16с одновременным преобразованием результата в аналоговый сигнал и может быть реализован, например, на базе цифроаналоговых преобразователей типа К572ПА1.
Регистр 16 служит для записи и хранения информации с выходов счетчика 13.
Интегратор 17 служит для интегрирования напряжения с выхода цифро- аналогового преобразователя 15.
Компаратор 18 вырабатывает импуль положительной полярности в определенный момент наблюдения, т.е. в самом конце интервала интегрирования
,
10
f5
20
25
30
35
40
45
50
55
интегратора- 17, в случае если уровень вьсходного напряжения интегратора 17 провьшает опорный уровень напряжения, задаваемый источником 14 опорного напряжения.
Дифференцирующий элемент 19 формирует сигнал счета объектов.
Первый счетчик 13 предназначен для накопления и индикации результата счета импульсов, поступающих с выхода дифференцирующего элемента 19.
Устройство работает следующий образом.
Генератор 1 тактовых импульсов вырабатывает импульсы положительной полярности, частота следования которых лежит в пределах от сотен килогерц до десятков мегагерц (фиг.2й), на выходах делителя 2 частоты понижается до предела от сотен герц до единиц килогерц (фиг. 25), что обусловлено условиями распространения электромагнитных волн в полупроводящих средах. Узкополосный фильтр 3 выделяет первую гармонику периодических импульсов последовательности, преобразуя тем самым последовательность прямоугольных импульсов в синхронный сигнал синусоидальной формы (фиг. 2б).
Далее синусоидальный сигнал усиливается первым усилителем 4 и поступает на электроды датчика 5. В результате в зоне контроля между электродами датчика 5 образуется квазиста- дионарное электромагнитное поле токов проводимости. Пересечение объектом пространства между электродами вызывает эквивалентное изменение проводимости зоны контроля, меняется амплитуда и фаза токов проводимости.
Сигнал на входе второго усилителя 6 представляет собой синусоидальное напряжение, амплитуда и фаза которого связаны с собственной проводимостью участка среды между,электро- дами датчика 5, т.е. с проводимостью как самой среды, так и с наличием объекта, пересекающего зону контроля.
Дальнейшая обработка сигнала проводится по амплитудному и фазовому каналам. Оценка по амплитуде A(t) и задержанная на временной интервал f оценка по фазе i(t-Т) коррелируют- ся с помощью цифроаналогового преобразователя 15 и интегратора 17, в результате чего на выходе интеграто513
pa 17 формируется амплитудно-фазовый корреляционный сигнал
R(t)
Mt) (t-г) dt, (1)
где R(t) - напряжение на выходе ин- тегратора 17; (t) - оценка по амплитуде; Ч () оценка по фазе с временной задержкой; Т - время интегрирования.
Значение R(t) сравнивается в момент времени Т с пороговым напряжением. Таким образом решается задача о&наружения, что позволяет судить о наличии или отсутствии объекта, пересекающего зону контроля, с максимальной вероятностью правильного обнаружения Р при заданной вероятности ложной тревоги . Оптимальный выбор задержки Т и времени интегрирования Т позволяет значительно уменьшить влияние гальванических и термодинамических шумов электродов шумов, вызванных турбулентными движениями и волнением среды, дробовых шумов перехода электрод - сре да.
Оценка по амплитуде Л(t) и оценка по фазе ifCt-T) с задержкой на временной интервал Т получаются следующим образом. Блок 8 фазовой автоподстройки частоты форми рует сигнал синусоидальной формы, когерентный выходному напряжению второго усилителя 6 (фиг. 2 г). Умножитель 7, перемножая выходные напряжения усилителя 6 и блока 8 фазовой автоподстройки частоты, осуществляет синхронное детектирование сигнала, и таким образом определяется оценка по амплитуде X(t). Кроме умножителя 7, выходное напряжение блока 8 фазовой автоподстройки частоты поступает на первый формирователь 9 импульсов, который преобразует синусоидальный сигнал в синхронную последовательность положительных-импульсов прямоугольной формы (фиг. 2(3). Эта последовательность подается на вход второго формирователя 10 импульсов, на другой вход которого подаются импульсы с выхода делителя 2 частоты С выхода второго формирователя 10 импульсов снимаются импульсы положительной полярности, длительность которых прямо пропорциональна фазовым сдвигам за счет флуктуации проводимости среды и наличия объекта в контролируе0
26236
мой зоне (фиг. 2е). Далее сигнал поступает на вход элемента 11 задер, ки, который представляет собой цепочку сдвиговых регистров, такти5 руемых прямоугольными импульсами с вывода делителя 2 частоты. Изменяя коэффициент деления частоты на втором выходе делителя 2 частоты, можно варьировать частоту следования тактирующих импульсов, что позволяет уменьшать или увеличивать интервал временной задержки оценки по фазе f(), Возможность оптимального выбора значений задержки С и
интервала интегрирования Т позволяет адаптировать систему в целом к воздействию определенного вида помех. Так, при отсутствии флуктуационных помех, вызванных, например, поверхностным волнением среды, основным источником шумов являются термодинами ческие шумы усилительных каскадов и нестабильности питающей сети. Это, в основном, шумы с широким спектром и малым интервалом кррреляции, поэтому для улучшения чувствительности устройства полезно уменьшить временную задержку Тц и время интегрирования Т. В случае сильного воздейстВИЯ флуктуационной составляющей, свя- занной с поверхностным волнением среды, наоборот, целесообразнее увеличивать временную задержку по фазе Т и время интегрирования Т. Гене5 ратор 1 тактовых импульсов, ключ 12 и счетчик 20 осуществляют преобразование время - код для импульсов с выхода элемента 11 задержки, длительность которых прямо пропорциональна
оцениваемому фазовому сдвигу. Как только на управляющем входе ключа 12 появляется импульс положительной полярности, тактовые импульсы с выхода генератора 1 тактовых импульсов
5
0
5
0
5
поступают на вход счетчика 20 (фиг.2 ж) . На информационных выходах счетчика 20 в каждый новый период несущей частоты, т.е. сигнала с первого выхода делителя 2 частоты, появляется информация в двоичном коде о задержанной на интервал Тр оценке фазового сдвига между исходным сигналом с выхода первого усилителя 4 и принятым сигналом с выхода второго усилителя 6. Далее информация переписывается и хранится в регистре 16, информационные выходы которого связаны с цифровыми входами цифроана10
15
лотового преобразователя 15, что обеспечивает неизменность выходного уровня последнего в моменты счета тактовых импульсов счетчиком 20. Цифроаналоговый преобразователь 15 перемножает аналоговый сигнал оценки по амплитуде A(t) на задержанную оценку по фазе (t-Г), которая содержится в двоичном коде на выходах регистра 16. Далее результат интегрируется и формируется амплитудно- фазовый корреляционньй сигнал, который поступает на первый вход компаратора 18, на второй вход которого подается опорный сигнал с выхода источника 1А опорного напряжения. Источник Т4 опорного напряжения является низкочастотным активным фильтром, постоянная времени которого выбрана таким образом, что его выходной сигнал изменяется только под действием сверхнизкочастотных флуктуации проводимости среды, вызванных суточными изменениями ее температуры и состава, а объекты, пересекающие зону контроля, не оказывают на него существенного влияния. Коэффициент передачи источника 14 опорного напряжения задается исходя из статических характеристик обнаружителя, аналогично известным, например, в локации и связи системам обнаружения. При превышении в момент времени напряжением на выходе интегратора 1 7 порога,задаваемого источни- ком 14 опорного напряжения,делается вывод о пересечении зоныконтроля обък- - том , и на выходе компаратора 18 появляется уровень,отличный от нулевого, котоФ о р м у л- а
и
8 зоб
р е т е н
20
25
30
Устройство для счета движущихс объектов, содержащее делитель час ты, усилители, датчик, первый фо мирователь импульсов, liHTerpaTop, выход которого подключен к первом входу компаратора, выход которого единен через дифференцирующий эле мент с входом первого счетчика, о личающееся тем, что, с целью повьщ1ения точности счета дв жущихся объектов путем применения амплитудно-фазовой корреляционной работки сигналов, в него введены ратор тактовых импульсов, фильтр, ножитель, блок фазовой автоподстр ки частоты, второй формирователь пульсов, элемент задержки, ключи, второй счетчик, регистр, цифроана говый преобразователь и источник опорного напряжения ., выход перво усилителя подключен через датчик входу второго усилителя, выход ге ратора тактовых импульсов соедине с входом делителя частоты и с упр ляющим входом ключа, выход которо соединен с входом второго счетчик выходы которого через регистр под ключены к соответствующим первым входам цифроаналогового преобразо теля, выход которого соединен с в дом интегратора, первый выход дел ля частоты подключен к первому вх элемента задержки, выход которого единен с информационным входом кл второй выход делителя частоты под ключен к первому входу второго фо мирователя импульсов и через фил
рый на выходе дифференцирующего элемен- к входу первого усилителя, выход
та 1 9преобразуется в импульсы,счет которых осуществляется счетчиком 20.
Преимущество предлагаемого уст- рейства по сравнению с известными заключается в том, что в результате определения взаимной корреляционной функции амплитудного и фазового каналов уменьщается влияние термодинамических, гальванических щумов электродов датчика, шумов, связанных с движением и поверхностным волнением полупроводящей среды. Таким образом, повыщается точность счета объектов, увеличивается вероятность правильного обнаружения при уменьшении вероятности ложной тревоги.
2623
Ф о р м у л- а
и
8 зоб
р е т е н и я
0
5
0
5
30
Устройство для счета движущихся объектов, содержащее делитель частоты, усилители, датчик, первый формирователь импульсов, liHTerpaTop, выход которого подключен к первому входу компаратора, выход которого соединен через дифференцирующий элемент с входом первого счетчика, о т- личающееся тем, что, с целью повьщ1ения точности счета движущихся объектов путем применения амплитудно-фазовой корреляционной обработки сигналов, в него введены генератор тактовых импульсов, фильтр, умножитель, блок фазовой автоподстройки частоты, второй формирователь импульсов, элемент задержки, ключи, второй счетчик, регистр, цифроанало- говый преобразователь и источник опорного напряжения ., выход первого усилителя подключен через датчик к входу второго усилителя, выход генератора тактовых импульсов соединен с входом делителя частоты и с управляющим входом ключа, выход которого соединен с входом второго счетчика, выходы которого через регистр подключены к соответствующим первым входам цифроаналогового преобразователя, выход которого соединен с входом интегратора, первый выход делителя частоты подключен к первому входу элемента задержки, выход которого соединен с информационным входом ключа, второй выход делителя частоты подключен к первому входу второго формирователя импульсов и через фильтр
к входу первого усилителя, выход
второго усилителя соединен с входом блока фазовой автоподстройки частоты и первым входом умножителя, выход которого подключен к второму входу цифроаналогового преобразователя и через источник опорного напряжения к второму входу компаратора, выход блока фазовой автоподстройки частоты соединен с вторым входом умножителя и входом первого формирователя импульсов, выход которого подключен к второму входу второго формирователя импульсов, выход которого соединен с вторым входом элемента задержки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство передачи телеметрической и видеоинформации с частотно-временным уплотнением радиоканала и аналого-цифровым методом частотной (фазовой) модуляции несущей частоты | 2017 |
|
RU2641460C1 |
| УСТРОЙСТВО ПОИСКА И СОПРОВОЖДЕНИЯ СИГНАЛА СИНХРОНИЗАЦИИ В СПУТНИКОВЫХ СИСТЕМАХ СВЯЗИ ПО ПРИЕМУ | 1995 |
|
RU2093964C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ ПЕРЕДАЧИ ИНФОРМАЦИИ С АМПЛИТУДНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1991 |
|
RU2042194C1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ПОМЕХ | 1990 |
|
RU2074516C1 |
| Синтезатор частоты с частотной модуляцией | 1986 |
|
SU1345343A1 |
| Устройство для балансировки | 1991 |
|
SU1793291A1 |
| АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 1990 |
|
RU2012013C1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО | 1991 |
|
RU2005994C1 |
| ЦЕЗИЕВЫЙ СТАНДАРТ ЧАСТОТЫ | 1994 |
|
RU2076411C1 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2005 |
|
RU2310992C2 |
Изобретение относится к средствам неразрушающего контроля, основанным на использовании свойств физических полей, в частности к электрическим счетно-регистрирующим устройствам, и может быть использовано в водных и полупроводящих средах для учета движущихся объектов как живой, так и неживой природы. Целью изобретения является повышение точности счета движущихся объектов за счет уменьшения влияния шумов электродных датчиков и окружающей среды путем применения амплитудно-фазовой корреляционной обработки сигналов. Устройство содержит генератор 1 тактовых импульсов, делитель 2 частоты, фильтр 3, первый усилитель 4, датчик 5, второй усилитель 6, умножитель 7, блок 8 фазовой автоподстройки частоты, первый формирователь 9 импульсов, второй формирователь 10 импульсов, элемент 11 задержки, ключ 12, первый счетчик 13, источник опорного напряжения 14 , цифроаналоговый преобразователь 15, регистр 16, интегратор 17, компаратор 18, дифференцирующий элемент 19 и второй счетчик 20. Преиму щество устройства по сравнению с известным заключается в том, что в результате определения взаимной корреляционной функции амплитудного и фазового каналов уменьшается влияние термодинамических, гальванических шумов электродов датчика, шумов, связанных с движением и поверхностным волнением полупроводящей среды. Таким образом, повышается точность счета объектов, увеличивается вероятность правильного обнаружения при уменьшении вероятности ложной тревоги. 3 ил. i (Л оо го 05 to оо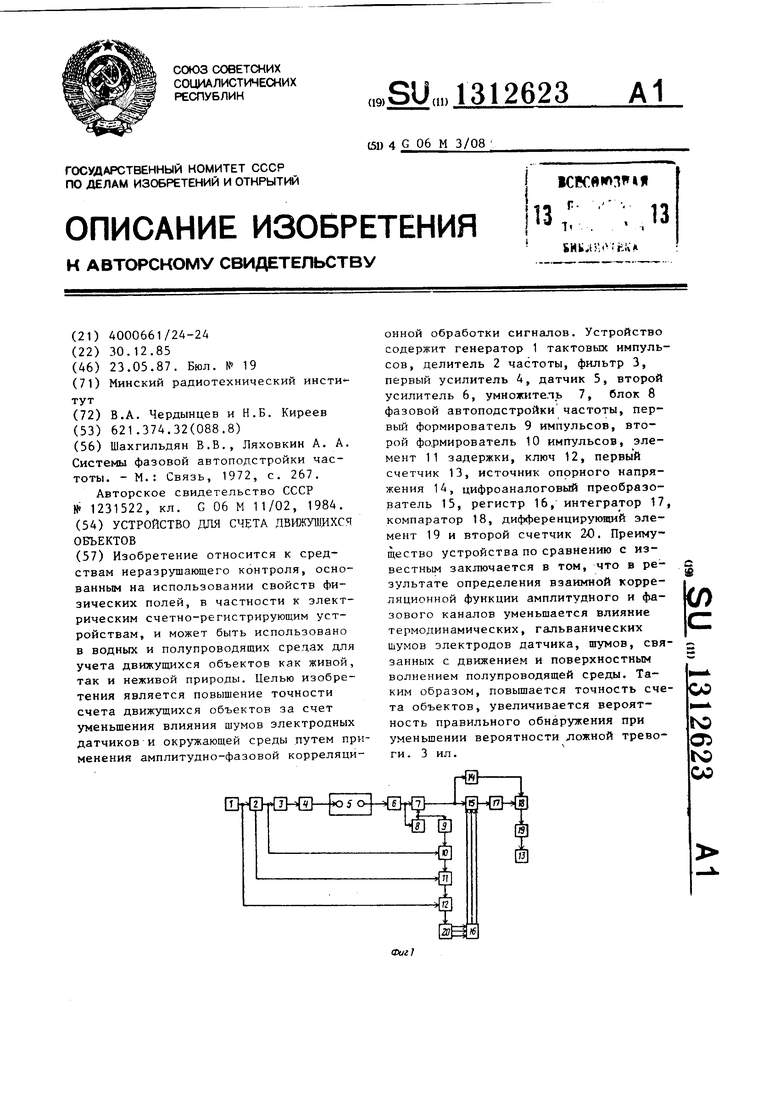
| Шахгильдян В.В., Ляховкин А | |||
| А | |||
| Системы фазовой автоподстройки частоты | |||
| - М.: Связь, 1972, с | |||
| Тепловой измеритель силы тока | 1921 |
|
SU267A1 |
| Устройство для счета движущихся объектов | 1984 |
|
SU1231522A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
