t
Изобретение относится к средствам неразрушающего контроля, основанным на использовании свойств физических полей, в частности к электрическим счетно-регистрирующим устройствам, устройствам отбраковки по физическим признакам и направлению движения, и может быть использовано с преимуществом в водных и полупроводящих
1231522
статического плоскопараллельного по между электродами в каждой паре при подаче на них переменного напряжени расстояние между электродами в каждой паре должно быть значительно меньше длины волны сигнала.
Делитель 4 частоты формирует сиг налы управления коммутаторами 5, 7, 8, 10, 13, 14 для попеременной рабо
средах для контроля движущихся объек- Ю ты датчиков 6, 9 и соответствукмцей
тов живой и неживой природы.
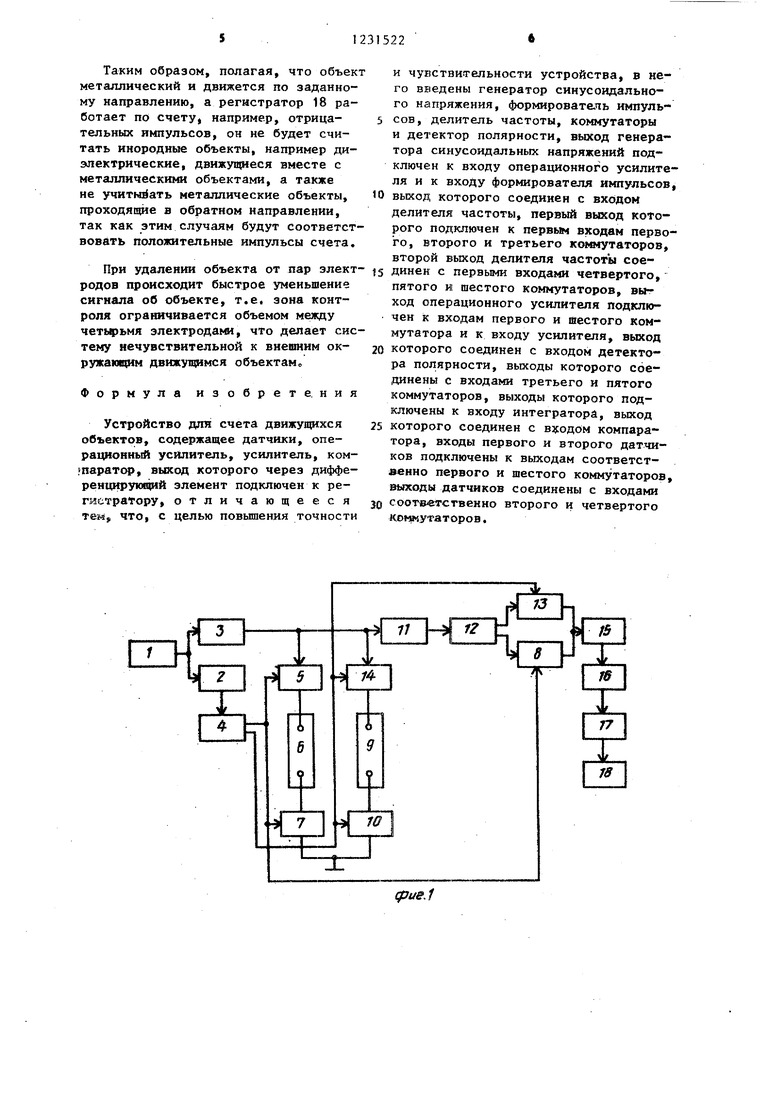
Цель изобретения - повьпиение точности и чувствительности устройства. На фиг, 1 представлена блок-схема устройства для учета движущихся объектов; на фиг. 2 - диаграммы напряжений ,
Устройство содержит генератор 1 синусоидального напряжения, формирователь 2 прямоугольных импульсов, операционньй усилитель 3, делитель 4 частоты, первый коммутаюр 5, датчики 6, второй коммутатор 7, третий коммутатор 8, датчики 9, четвертый коммутатор 10, усилитель 11, детектор 12 полярности, электронный коммутатор 13, электронш,1й коммутатор 14, интегратор 15, компаратор 16, дифференцирующий элемент 17, регистратор 18.
I
Устройство содержит электроды первого и второго датчиков 6 и 9, выполненные в виде проводящих стержней, могут быть одинаковой длины и сгпуп- пированы по парам. 6 каждой паре электроды параллельны между собой так, что при подаче на них напряже - ния между ними образуется плоскопараллельное поле. Взаимное пространственное положение электродов можно представить следующим образом.
Если в вершинах плоского прямоугольного четырехугольника восстановить перпендикуляры к плоскостиj то перпендикулярам соответствует расположение двух пар протяженных электродов в пространстве. Примем меньшей стороне прямоугольника соответствует расстояние между парами электродов, которое выбирается из условия менее двадцатой части длины .объекта. Большая сторона прямоугольника определяет расстояние между электродами в каждой из пар. Это расстояние выбирается, с одной стороны, чтобы между Электродами в каждой паре прошел объект, с другой стороны, чтобы вы- полнялось условие образования квазистатического плоскопараллельного поля между электродами в каждой паре при подаче на них переменного напряжения, расстояние между электродами в каждой паре должно быть значительно меньше длины волны сигнала.
Делитель 4 частоты формирует сигналы управления коммутаторами 5, 7, 8, 10, 13, 14 для попеременной рабокоммутации выходов детектора 12. Коэффициент деления четный, минимальный коэффициент деления равен 2, максимальный коэффициент делен Я ограничивается временем нахождения объекта в зоне контроля и для объектов, проходящих зону контроля более, чем за 0,01 с, при частоте генератора 1 синусоидального напряжения 1-10 кГц
оптимальный коэффициент деления частоты равен 4. Выходы делителя 4 частоты инверсны относительно друг друга. В качестве делителя 4 частоты можно использовать 1 -триггеры, любые комбинированные триггеры, например К155ТМ2, К134ТМ2 и т. д.
Устройство работает следующим образом.
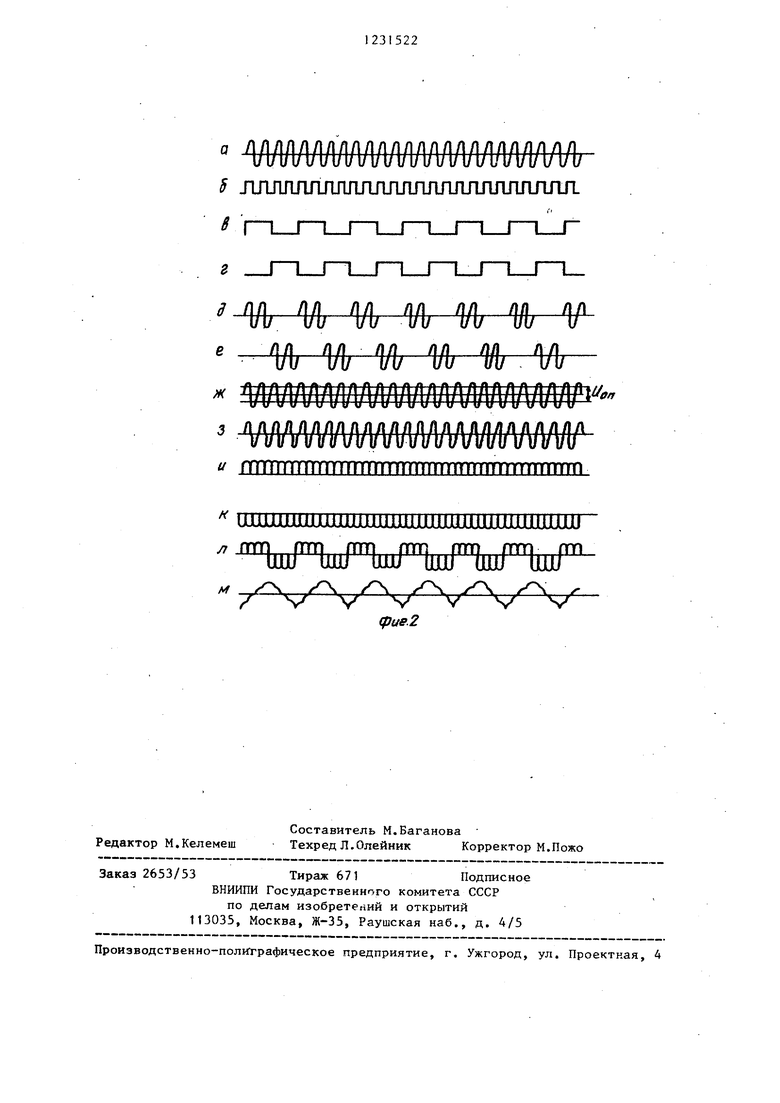
Генератор 1 синусоидального напряжения вырабатывает монохромное сину- , соидальное напряжение с частотой от 1 до 10 кГц (фиг. 2а), причем синусоидальный сигнал, поступающий в измерительную цепь, проходит через операционный усилитель 3, который обеспечивает стабильный ток датчиков при изменении нагрузки - сопротивления между электродами при прохождении объектом зоны контроля, кроме того, он поступает на вход формирователя 2 прямоугольных импульсов, в котором синусоидальный сигнал преобразуется в импульсы прямоугольной формы (фиго 2S) той же частоты, которые затем поступают на делитель 4 частоты с коэффи15иентом деления 4. На выходах делителя 4 частоты формируются взаимоинверсные импульсы управления коммутаторами 5, 7, 8, 10, 13 и 14 (фиг, 2&, г ), обеспечиванмцие поочередное срабатывание датчиков 6 и 9, Так, при поступлении с соответствующего выхода делителя 4 частоты управляияцего импульса опреде- ленной полярности, например положительной (зависит от типа электронного коммутатора), на электронные коммутаторы 5, 7, 14 они замкнутся и в
3
измерительную цепь включатся датчики 6, датчики 9, наоборот, в этот момент будут отключены, так как с другого выхода делителя 4 частоты на управляющие входы электронных ко мутаторов 8, Ю, 13 поступит отрицательный перепад напряжения и они разомкнут цепь. Как только сигналы на выходе делителя 4 частоты изменятся на противоположные, произойде обратный процесс: замкнутся электронные коммутаторы 8, 10, 13 и в измерительную цепь включатся датчики 9, а датчики 6 будут отключены. Попеременная работа датчиков 6, 9 по- 5 сняется эпюрами (фиг. 2 и, е ). При этом электродная система из двух пар электродов образует плоскую электрическую штору из лвух параллельно и близко расположенных плоскопараллель ных полей с временным разделением. Датчики 6, 9 являются низкоомной нагрузкой операционного усилителя 3„ Сопротивление между электродами датчиков 6, 9 в воде составляет 100 - 10000 Ом, сопротивление замкнутых электронных коммутаторов 5, 7 или 8, 10 составит 50-200 Ом. Сигнал на входе усилителя 11 с зоной нечувствительности представляет собой синусои дальное напряжение, амплитуда которого зависит от сопротивления участка среды между электродами датчиков 6, 9 и не изменяется при отсутствии объекта (фиг. 2х). При наличии под- вижного объекта амплитуда входного сигнала модулируется по амплитуде, причем глубина модуляции зависит от того, насколько изменяется при внесении объекта межэлектродное сопро- тивление датчиков и составляет десятые, сотые и даже тысячные доли процента. Усилитель 11 с зоной нечувствительности ограничивает неинформативную часть синусоидального сигна- ла, усиливая напряжения, амплитуда которых вьше определенного порога и„др (фиг. 2.Tf) , расширяя тем самым динамический диапазон изменения полезного сигнала, а также увеличивая чувствительность устройства при прохождении мелких .объектов. С выхода усилителя 11 с зоной нечувствитеггь- иости сигнал (фиг. 2-j) поступает на вход детектора 12, на одном выходе которого преобразуется в импульсы положительной полярности (фиг 2n)j а на другом - в импульсы отрицатель5224
ной полярности (фиг. 2к.). Через электронные коммутаторы 13, 14 оба выхода двухполупериодного детектора соединяются с входом интегратора 15, причем в момент времени работы электродов датчика 6 замкнут электронный коммутатор 14 и на вход интегратора 15 поступают импульсы, например, положительной полярности (фиг. 2л), в момент работы электродов датчика 9 замкнут электронный коммутатор 13 и на вход интегратора 15 поступают импульсы противоположной полярности. При отсутствии подвижного объекта в зоне контроля амплитуда этих импульсов одинакова, усредненное напряжение на выходе интегратора равно нулю а порог срабатывания коммутатора 16 устанавливается выше фона флюктуации выходного напряжения интегратора/16 так, чтобы регистратор 18 не фиксировал сигнал счета.
При последовательном прохождении, например, электропроводяпщм объектом плоскопараллельных полей между-парами электродов первого и второго датчиков 6 и 9 (направление показано стрелкой) на выходах двухполупериодного детектора 12 формируются сигналы об объекте. Оба сигнала после преобразования в интеграторе 15 образуют разностный сигнал. Разностный сигнал поступает на дифференцирующий элемент 17 о Импульс счета формируется дифференцирующим элементом 17. Полярность импульсов счета согласована с порядком прохождения объектом пар электродов, например при прохождении объекта от второй пары электродов (датчика 9) к первой (датчику 6) вырабатывается отрицательный импульс счета. Аналогично можно показать, что при прохождении объекта в обратном направлении по отношению к рассмотренному сформируется положительный по знаку импульс счета.
Если направление движения объекта зафиксировано, например, по направлению стрелки, показанной на фиг. 1, принимает другую природу по электропроводимости объект, например диэлектрик, то на выходе формируется положительный импульс счета. Понятие проводящих и диэлектрических объектов формируется относительно среды, в которой осуществляется численный контроль.
Таким образом, полагая, что объек металлический и движется по заданному натфавлению, а регистратор 18 работает по счету, например, отрицательных импульсов, он не будет считать инородные объекты, например диэлектрические, движущиеся вместе с металлическими объектами, а также не учитывать металлические объекты, проходящие в обратном направлении, так как этим случаям будут соответствовать положительные импульсы счета.
При удалении объекта от пар электродов происходит быстрое уменьшение сигнала об объекте, т.е. зона контроля ограничивается объемом между четьчрьмя элeктpoдa в, что делает систему нечувствительной к внешним окружающим ДВИЖУ1ЦИМСЯ объектам о
Формула изобретения
Устройство дли счета движущихся объектов, содержащее датчики, операционный усилитель, усилитель, ком- (паратор, выход которого через дифференцирующий элемент подключен к регистратору, отличающееся тем, что, с целью повышения точности
и чувствительности устройства, в него введены генератор синусоидального напряжения, формирователь импуль- 5 сов, делитель частоты, коммутаторы и детектор полярности, выход генератора синусоидальных напряжений подключен к входу операционного усилителя и к входу формирователя импульсов
to выход которого соединен с входом делителя частоты, первый выход которого подключен к первьм входам первого, второго и третьего кою1утаторов, второй выход делителя частоты сое15 динен с первыми входами четвертого, пятого и шестого коммутаторов, выг- ход операционного усилителя подключен к входам первого и шестого коммутатора и к входу усилителя, выход
20 которого соединен с входом детектора полярности, выходы которого соединены с входами третьего и пятого коммутаторов, выходы которого подключены к входу интегратора, выход
25 которого соединен с вводом компаратора, входы первого и второго датчиков подключены к выходам соответственно первого и щестого коммутаторов выходы датчиков соединены с входами
30 сооте-етственно второго и четвертого коинчутаторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для учета движущихся объектов | 1985 |
|
SU1278908A1 |
| Устройство для учета движущихся объектов | 1981 |
|
SU1012292A1 |
| Устройство для учета движущихся объектов | 1985 |
|
SU1305740A1 |
| Устройство для счета движущихся объектов | 1984 |
|
SU1218410A1 |
| Устройство для счета движущихся объектов | 1981 |
|
SU1040498A1 |
| Устройство для счета движущихся объектов | 1986 |
|
SU1401497A2 |
| Устройство для счета движущихся объектов | 1985 |
|
SU1312623A1 |
| Устройство для определения динамики ударного объема сердца | 1981 |
|
SU1024065A1 |
| Устройство для автоматической фокусировки объектива | 1991 |
|
SU1789963A1 |
| Устройство для счета движущихся объектов | 1986 |
|
SU1381556A1 |
Изобретение относится к средствам неразрушающего контроля, в частности к электрическим счетно-регист- рирующим устройствам, и может быть использовано с преимуществом в водных и полупроводящих средах для контроля движущихся объектов живой ri неживой природы. Цель изобретения - по- вьшение точности и чувствительности устройства. Устройство содержит генератор синусоидального напряжения, формирователь импульсов, преобразователь напряжения в ток, делитель частоты, коммутаторы, датчики, усилитель и детектор полярности, на выходе которого формируются импульсы положительной и отрицательной полярностей, которые через соответствующие коьо1утаторы поступают на интегратор, на выходе которого образуется разностный сигнал,- который через дифференцирующий элемент поступает на регистратор. При последовательном прохождении электропроводящим объектом плоскопараллельных полей между парами электродов первого и второго датчиков на выходе детектора полярности формируются сигналы об объекте. 2 ил. (Л ел to
s лллллплллллшшллшишлпллл.
e д e ж
ппппп птп гттт m г г m г mr г тт гттгтттпттт
ujLJuuujuuuuuuuuuuuuurafflmjDDQOimjuuuuLJLmmJU
Х. Х / ХЧ х Х 7 NT V V 7 N7
f/ff2
| Устройство для счета движущихся объектов | 1981 |
|
SU1040498A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для учета движущихся объектов | 1981 |
|
SU1012292A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
