Изобретение относится к сельскохозяйственному машиностроению, в частности к посевным машинам и машинам для внесения гранулированных пе тицидов,
Цель изобретения - повышение точности дозирования высеваемого материала, снижение материалоемкости усройства, повышение производительное ти при настройке на норму высева.
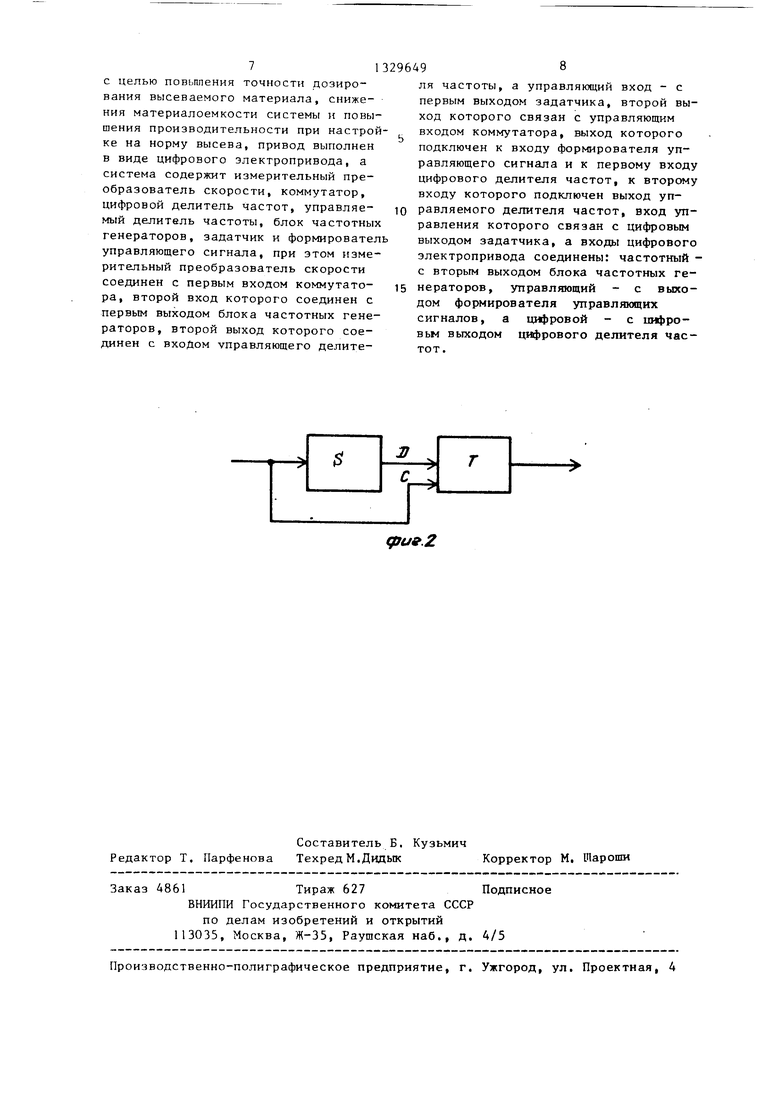
На фиг, 1 представлена функциональная схема дозирующей системы сеялки; на фиг, 2 - схема формировани управляющего сигнала,
Дозирующая система сеялки (фиг, состоит из измерительного преобразователя 1 скорости, коммутатора 2, цифрового делителя 3 частот, выход которого соединен с цифровым входом привода 4, подключенного к высевающей системе 5, управляемого делителя 6 частоты, блока 7 частотных генераторов, один из выходов которого подключен к частотным входам управляемого делителя 6 частоты и привода 4, а второй - к одному из входов коммутатора 2, формирователя 8 управляющего сигнала и задатчика 9, подключенного к управляющим входам коммутатора 2, управляемого делителя частоты 6 и блока 7 частотных генераторов,
Второй вход коммутатора 2 соединен с выходом измерительного преобразователя 1 скорости сеялки, а выход формирователя 8 управляющего сигнала соединен с управляющим входом привода 4, Причем один из входов цифрового делителя 3 частот соединен с выходом управляемого делителя 6 частоты, а второй - подключен к выход коммутатора 2 и входу формирователя 8 управляющего сигнала.
Измерительный преобразователь 1 скорости предназначен для формирования импульсов с частотой, пропорциональной скорости сеялки, и выполнен, например, в виде электромагнитного преобразователя, установленного на опорно-приводном колесе сеялки или дополнительном ненагруженном колесе ,
Привод 4 служит для приведения во вращение вала высевающего аппарата высевающей системы 5 и управления частотой его вращения. Он вьтолнен в виде цифрового электропривода по
стоянного тока, снабженного тремя входами: частотным, цифровым и управляющим. Частота вращения выходного вала привода зависит от значений подаваемого на цифровой вход входного кода N и частоты f импульсов, поступаю1цих от блока частотных генераторов на его частотный вход. Управляющий вход предусмотрен для пуска и останова привода по команде от формирователя 8 управляющего сигнала ,
Управление частотой вращения привода осуществляется при помощи входного кода N; значение частоты f выбирается заранее и не изменяется в процессе работы. Электропривод работает с частотой вращения f изменяюще 1ся обратно пропорциональ- но входному коду N 1
fnp fiN
(О
где ся - коэффициент пропорциональности.
Блок 7 частотных генераторов служит для формирования импульсных сигналов с частотами f-p и f. Управляющий вход блока 7 предназначен
для установки требуемой частоты f сигналов, имитирующих скорость сеялки, и приема сигнала Настройка от задатчика 9, после поступления которого сигналы частотой f поступают на соответствующий вход коммутатора 2,
Управляемый делитель 6 частоты предназначен для преобразования сигналов, поступающих от частотного генератора, частотой f-p в последовательность импульсов частотой f. , Управление делителем 6 частоты осуществляется цифровым кодом К, подаваемым на его управляющий вход
от задатчика 9, Введение в схему устройства управляемого делителя частоты позволяет осуществить преобразование частоты fy, пропорциональный скорости, в частоту вращения выходного вала цифрового управляемого привода с заданным коэффициентом редукции К,
Цифровой делитель 3 частот служит для вычисления отношения /f частот f и f сигналов, поступающих соответственно, на его второй и первый входы и преобразования полученного сигнала в цифровой код N, управляющий частотой вращения привода 4,
Принцип работы цифрового делителя 3 частот заключается я подсчете числа имцульсоп частотой f,, ria временной интервал между соседними импульсами частоты f , вырабатываемыми измерительным П11еобразователем 1 скорости Коммутатор 2 служт-jT д.пя воспроизведения на своем выходе одного из входных сигналов.
Задатчик 9 предназначен для установки заданной частоты сигналов, формируемых блоком 7 частотных генераторов, установки цифрового кода К на управляющем входе управляемого делителя 6 частоты и установки режима работы устройства (Работа или Настройка) путем подачи соответствующе Г о сигнала на управляю1Щ1й Вход коммутатора 2.
Формирователь 8 управляющего сигнала служит для формирования сигналов Пуск и Останов привода. Сигнал Пуск формируется блоком 8 при появлении на выходе коммутатора 2 первого импульса входного сигнала, а сигнал Останов - при отсутствии импульсов на выходе коммутатора в течение заданного времени «L,. Па фиг. в качестве примера практической реализации представлена схема формирователя 8 управ.ьяющего сигнала. Он состоит из последовательно соединенных одновибратора S с повторным запуском, с длительностью выходного импульса L I и D-триггера Т, причем С-вход триггера соединен с входом одновибратора. Значение ij должно
удовлетворять условию; i, 1/f um т.е время Т, должно быть больше наибольшего периода следования импульсов частотой f , .
Высевающая система 5, включающая бункеры для гранул или семян, высевающие аппараты и материалопрово- ды, выбирается такой, чтобы расход материала на ее выходе изменялся прямо пропорционально частоте враше ния вала высеваю1цих аппаратов.
Устройство работает следующим образом.
В режиме Настройка с помощью задатчика 9 коммутатор 2 устанавливается в состояние, при котором на его выходе пропускаются импульсы от блока 7 частотных генераторов, на управляющем входе управляемого делителя частоты устанавливается значение ко- ффициента редукпии К, а на
5
0
блоке 7 задается частота импульсов, соответствующая заданной скорости сеялки. Па выходе фop иpoвaтeля В в начальный момент напряжение уровня логического О. Палее задатчиком 9 вырабатывается командный сигнал Настройка, и сигналы частотой f через коммутатор 2 начинают поступать на входы цифрового делителя 3 частот и формирователя 8 управляющего сигнала. Сигналы частотой f с другого выхода блока 7 поступают на частотные входы управляемого делителя 6 частоты и привода 4. При этом на входе цифрового делителя 3 частот появляются импульсы частотой .
При появлении первого импульса на выходе коммутатора 2 одновибратор S формирователя 8 (фиг. 2) изменяет свое состояние - переходит О в 1, начиная формировать импульс длительностью Т, , При этом на выходе триггера Т уровень сигнала сохраняется 5 прежним (О), поскольку одновибратор S запускается с некоторой задержкой. При появлении второго им- пульса на выходе коммутатора 2 на выходе одновибратора S сохраняется уровень логической 1 (так как Г- 7 1 /f, ), а триггер изменяет состояние с О на 1. Сигнал с выхода формирователя В (триггера Т) поступает на управляющий вход привода и запускает последний. Одновременно с появлением второго импульса на выходе коммутатора 2 цифровой делитель 3 частот вычисляет значение кода N, поступающего на цифровой вход привода 4
0
5
0
N ,,.(2)
В дальнейшем смена информации на цифровом входе привода происходит с частотой fу . Через некоторое время, зависящее от постоянной времени привода, частота вращения выходного вала привода устанавливается равной
„р af,/N aKf. (3)
Таким образом, установившаяся частота времения привода высевающей системы прямо пропорциональна скорости сеялки и коэффициенту К редукции. Как видно из формулы (3) частота вращения привода не зависит от частоты Гт, вырабатываемой генератором 7. Это является одним из достоинств предлагаемого технического
решения, поскольку нестабильность частоты f j не оказывает влияния на точность преобразования скорости сеялки в частоту вращения вала привода.
Отключение привода дозирующей системы в режиме Настройка производится путем подачи соответствующего управляющего сигнала на блок 7. При этом прекращается подача импульсов частотой f на вход коммутатора 2. Через время Г. после прихода последнего импульса формирователь 8 управяющего сигнала формирует сигнал нуевого уровня, поступающий на управяющий вход привода 4, в результате чего привод останавливается.
В режиме Настройка выбирается требуемый для обеспечения заданной нормы высева коэффициент К редукции, различные значения которого устанавиваются в процессе настройки задат- чиком 9,
В режиме Работа с помощью задат- чика 9 коммутатор 2 устанавливается в состояние, при котором на его выход пропускаются сигналы от измерительного преобразователя 1 скорости, а на управляющем входе управляемого елителя 6 частоты устанавливается требуемое значение коэффициента К едукции.
При работе сеялки импульсы частотой f , пропорциональной скорости вижения, с выхода измерительного реобразователя 1 скорости через комутатор 2 поступают на входы цифрового делителя 3 частот и формирователя 8 управляющего сигнала, а им- пульсы частотой f с выхода блока 7 - на частотные входы управляемого делителя 6 частоты и привода 4, Включение привода 4 происходит аналогично описанному запуску привода в режиме Настройка, при этом частота вращения привода изменяется пропорционально входному сигналу f(3). При остановке сеялки генерация импульсов измерительным преобразователем 1 скорости прекращается, и через время Tj после прихода последнего импульса от него формирователь 8 формирует управляющий сигнал, вызывающий останов привода.
Предлагаемое устройство, по сравнению с прототипом, позволяет повысить точность дозирования высеваемого материала, уменьшить материалоемкость устройства и повысить произво
10
15
20
25
29649
дительность труда при настройке сеялки на заданную норму высева.
Повышение точности дозирования высеваемого материала достигается за счет увеличения точности настройки сеялки или машины для внесения гранулир ованных пестицидов на заданную норму высева и точности преобразования скорости машины в частоту вращения вала высевающих аппаратов высевающей системы, пропорционально которой изменяется расход гранул или семян. В свою очередь, повышение точности настройки обеспечивается за счет более высокой (по сравнению р прототипом) точности установки коэф4мциента, дискретность значений которого может быть сделана достаточно малой, а также за счет автоматического поддержания во время настройки заданной частоты вращения вала Высевающих аппаратов. Точность преобразования скорости сеялки в частоту вращения вала привода повышается благодаря уменьшению влияния скольжения. Действительно, если измерительный преобразователь скорости установлен на дополнительном ненагруженном колесе, то скольжение колес сеялки практически не оказывает влияния на точность указанного преобразования. Если же он установлен на опорном колесе сеялки, то влияние скольжения при использовании предлагаемой дозирующей системы уменьшается благодаря уменьшению нагрузки на опорное колесо (прередаточный механизм, имеющийся в прототипе, отсутствует) .
Исключение из схемы громоздкого передаточного механизма и замена его относительно простой электронной схемой, выполненной на современных элементах микроэлектроники, обеспечивает снижение материалоемкости дозирующей системы. Повышение производительности труда при настройке сеялки на норму высева достигается благодаря сокращению времени на подготовку Сеялки к настройке и перестановку зубчаток передаточного механизма во время настройки.
30
35
40
45
50
Формула изобретениг
Дозирующая система сеялки, содержащая высевающую систему с приводом, отличающаяся тем, что,
с целью повышения точности дозирования высеваемого материала, снижения материалоемкости системы н повышения производительности при настройке на норму высева, привод выполнен в виде цифрового электропривода, а система содержит измерительный преобразователь скорости, коммутатор, цифровой делитель частот, управляемый делитель частоты, блок частотных генераторов, задатчик и формирователь управляющего сигнала, при этом измерительный преобразователь скорости соединен с первым входом коммутатора, второй вход которого соединен с первым выходом блока частотных генераторов, второй выход которого соединен с входом управляющего делителя частоты, а управляющий вход - с первым выходом задатчика, второй выход которого связан с управляющим входом коммутатора, выход которого подключен к входу формирователя управляющего сигнала и к первому входу цифрового делителя частот, к второму входу которого подключен выход управляемого делителя частот, вход управления которого связан с цифровым выходом задатчика, а входы цифрового электропривода соединены: частотный - с вторым выходом блока частотных генераторов, управляющий - с выходом формирователя управляющих сигналов, а цифрювой - с пифро- вьм выходом цифрового делителя частот.
дги.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Дозирующая система сельскохозяйственной распределительной машины | 1988 |
|
SU1655325A1 |
| Устройство для автоматического регулирования технологического процесса сельхозмашины | 1990 |
|
SU1704665A1 |
| Устройство для контроля интенсивности высева семян сеялкой | 1978 |
|
SU711605A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2013 |
|
RU2518737C1 |
| Устройство для контроля работы сельскохозяйственных агрегатов | 1982 |
|
SU1049001A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2009 |
|
RU2399185C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2011 |
|
RU2460268C1 |
| Устройство для настройки и контроля работы сеялки | 1989 |
|
SU1662388A1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ, КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ СЕМЯН И МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 1992 |
|
RU2043007C1 |
| Устройство для контроля, учета и автоматического управления работой сеялки | 1988 |
|
SU1616531A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к посевным машинам и машинам для внесения гранулированных пестицидов. Цель изобретения - повьш1ение точности дозирования высеваемого материала, снижение материалоемкости устройства, повьппение производительности при настройке на норму высева. Высевающая система 5 сеялки снабжена цифровым электроприводом 4, уПравляе- 1ым от сигнала датчика 1 скорости сеялки. В режиме Настройка с помощью задатчика 9 на управляющих входах делителя частоты устанавливается требуемый коэффициент К редукции. В режиме Работа по команде задатчика 9 коммутатор 2 пропускает на входы цифрового делителя 3 частот и формирователя 8 управляющего сигнала импульсы частотой f от датчика 1 скорости. Импульсы частотой f с выхода блока 7 частотных генераторов поступают на частотные входы управляемого делителя 6 частоты и привода 4, Установивщйяся частота вращения привода сеялки пропорциональна скорости сеялки, коэффициенту К редукции и не зависит от частоты f, вырабатываемой блоком 7 частотных генераторов, 2 ил. i (Л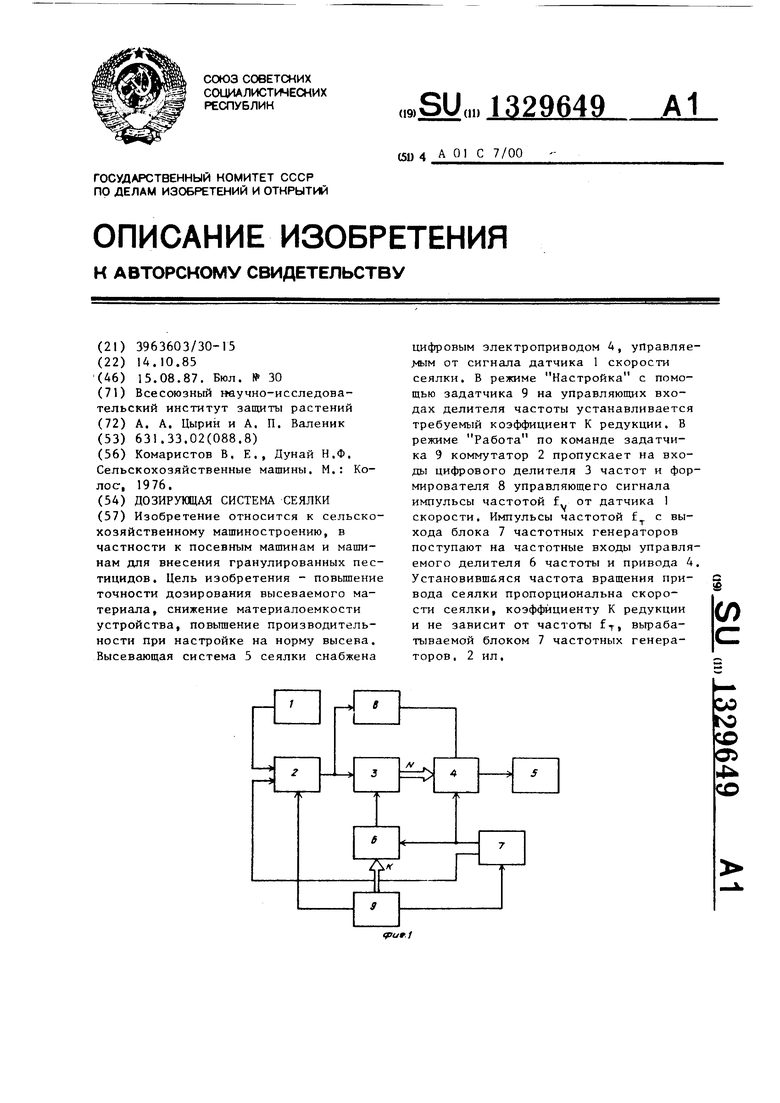
| Комаристов В | |||
| Е., Дунай Н.Ф | |||
| Сельскохозяйственные машины | |||
| М.: Колос, 1976. |
