Фи.е. i
Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам, распределяющим сыпучий материал или рабочую жидкость по обрабатываемой площади, и может быть использовано в посевных и посадочных машинах, опрыскивателях, машинах для внесения гранулированных пестицидов и удобрений.
Цель изобретения - повышение точности дозирования, надежности работы систе- мы и расширение функциональных возможностей.
На фиг. 1 представлена функциональная схема дозирующей системы сельскохозяйственной распределительной машины; на фиг. 2 - функциональная схема управляемого умножителя частоты; на фиг. 3 - фун- кциональная схема дозирующего устройства; на фиг. 4 - функциональная схема блока управления; на фиг. 5 - функциональная схема блока контроля состояния.
Дозирующая система сельскохозяйственной распределительной машины (фиг. 1) состоит из измерительного преобразователя 1 скорости, имитатора 2 скорости, коммутатора 3, информационные входы которого подключены к выходам измерительного преобразователя скорости и имитатора скорости, управляемого умножителя 4 частоты, блока 5 управления, выход которого подключен к управляющему входу управляемого умножителя 4 частоты, задатчика 6, дозирующих устройств 7 (на фиг. 1 изображены только три дозирующих устрбйства), управляющие входы которых соединены с выходом управляемого умножителя 4 частоты. Задатчик 6 снабжен шестью выходами, подключенными к управляющим входам имитатора 2 скорости и коммутатора 3, к цифровым входам управляемого умножителя 4 частоты и блока 5 управления, а также к управляющим входам Установка режима и Отбор пробы блока 5 управления. Информационный вход блока 5 управления соединен с выходом коммутатора 3 и с информационным входом управляемого умножителя 4 частоты.
Кроме того, дозирующая система снабжена блоком 8 контроля состояния, первый выход которого подключен к входу Аварийная остановка бюлока 5 управления,и индикатором 9. Первый вход индикатора 9 соединен с выходом блока 5 управления и с информационным входом блока 8 контроля состояния, второй выход которого подключен к второму входу индикатора 9. Дозирующие устройства 7 снабжены контрольными выходами, которые соединены с контрольными входами блока 8 контроля состояния.
Измерительный преобразователь 1 скорости предназначен для формирования сигнала, пропорционального скорости воздействия, например, скорости движения
машины (сеялки, опрыскивателя, машины для внесения гранулированных пестицидов и удобрений). Он может быть выполнен, например, в виде магнитоэлектрического преобразователя, установленного на до0 полнительном (ненагруженном) колесе или опорно-приводном колесе. При этом формируемый на выходе измерительного преобразователя 1 сигнал представляет собой последовательность импульсов частотой fv.
5Имитатор 2 скорости служит для формирования импульсного сигнала частотой fv . имитирующего при настройке агрегата (например, при настройке сеялки на норму вы- сеаа) реальный сигнал с выхода
0 измерительного преобразователя 1, пропорциональный скорости задающего воздействия. Имитатор 2 скорости может быть выполнен, например,в виде мультивибратора с регулируемым или переключающимся
5 по команде от задатчика 6 значением постоянной времени.
Имитатор 2 служит для воспроизведения на своем выходе одного из входных сигналов fv или fv1 Выбор нужного сигнала
0 осуществляется по команде, поступающей на управляющий вход коммутатора от задатчика 6.
Управляемый умножитель 4 частоты предназначен для преобразования низкоча5 стотного входного сигнала в сигнал частотой . Управление умножителем частоты осуществляется цифровым кодом К, подаваемым на его цифровой вход от задатчика 6. Схема практической реализации бло0 ка 4 представлена на фиг. 2. Блок 4 состоит из цифрового делителя 10 частот, управляемого частотного генератора 11 и двух управ- ляемых делителей 12 и 13 частоты. Частотные входы управляемых делителей
5 12 и 13 частоты подключены к выходу частотного генератора 11. Цифровой вход делителя 13 частоты соединен с выходом цифрового делителя 10 частот, первый вход которого является информационным вхо0 дом блока 4, а второй вход подключен к выходу делителя 12 частоты. Цифровой вход делителя 12 частоты является цифровым входом блока 4, а выход делителя 13 частоты - выходом блока 4. Управляемый час5 тотный генератор снабжен управляющим входом, который является управляющим входом блока 4 и соединен с третьим входом цифрового делителя 10 частот. Цифровой делитель 10 часто предназначен для преоб- ря пвдния отношения частот и tv, поступающих соответственно на его второй и первый (информационный вход блока 4) входы, в цифровой код N:
N
А fi К
О
Принцип работы цифрового делителя 10 частот заключается в подсчете числа импульсов частотой fT/K за временной интервал между соседними импульсами входного сигнала (fv ). Смена информации на выходе ЦДЧ 10 происходит с частотой входного сигнала.
Дополнительной функцией ЦДЧ 10 является формирование на его выходе начального кода No при поступлении на его третий вход управляющего сигнала or блока управления (при запуске устройству).
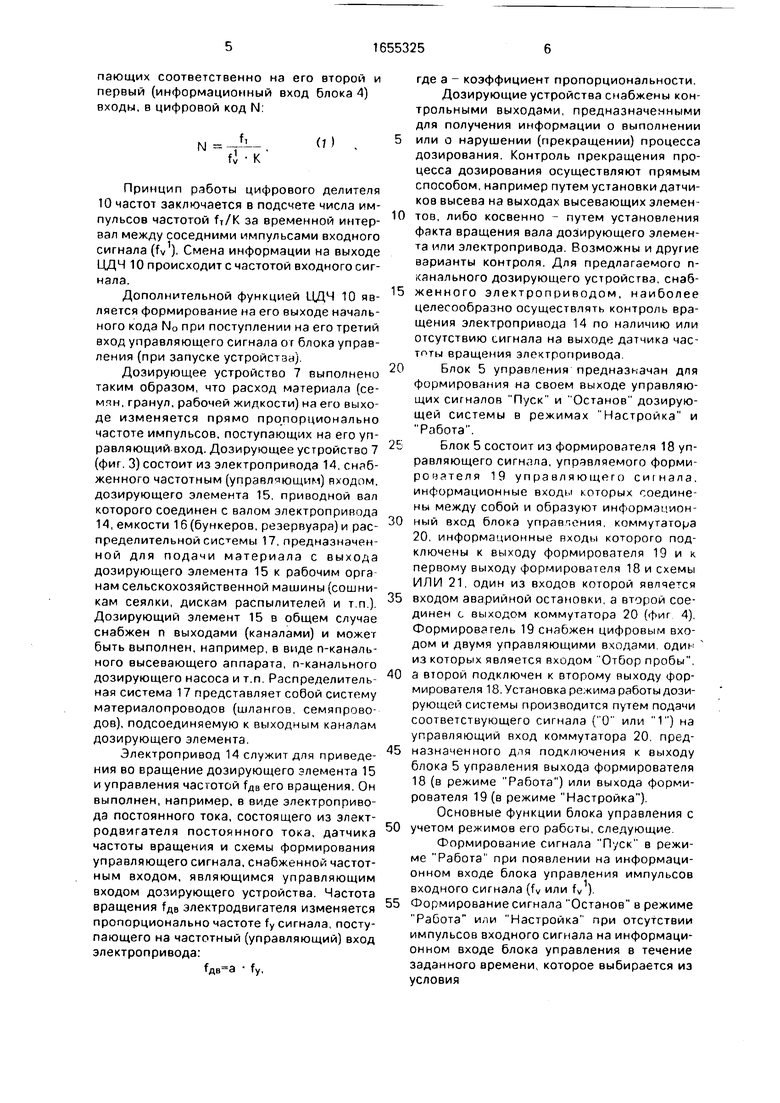
Дозирующее устройство 7 выполнено таким образом, что расход материала (се- мпн, гранул, рабочей жидкости) на его выходе изменяется прямо пропорционально частоте импульсов, поступающих на его уп- равляющий-вход. Дозирующее устройство 7 (фиг. 3) состоит из электропривода 14, снабженного частотным (управляющим) входом. дозирующего элемента 15, приводной вал которого соединен с валом электропривода 14, емкости 1 б (бункеров, резервуара) и распределительной системы 17,предназначенной для подачи материала с выхода дозирующего элемента 15 к рабочим органам сельскохозяйственной машины (сошникам сеялки, дискам распылителей и т.п.). Дозирующий элемент 15 в общем случае снабжен п выходами (каналами) и может быть выполнен, например, в виде п-каналь- ного высевающего аппарата, п-канального дозирующего насоса и т.п. Распределитель- ная система 17 представляет собой систему мэтериалопроводов (шлангов, семяпроводов), подсоединяемую к выходным каналам дозирующего элемента.
Электропривод 14 служит для приведения во вращение дозирующего элемента 15 и управления частотой тдв его вращения. Он выполнен, например, в виде электропривода постоянного тока, состоящего из электродвигателя постоянного тока, датчика частоты вращения и схемы формирования управляющего сигнала, снабженной частотным входом, являющимся управляющим входом дозирующего устройства. Частота вращения тдв электродвигателя изменяется пропорционально частоте fy сигнала, поступающего на частотный (управляющий) вход электропривода:
fy,
0
0
5
0
где а - коэффициент пропорциональности.
Дозирующие устройства снабжены контрольными выходами, предназначенными для получения информации о выполнении или о нарушении (прекращении) процесса дозирования. Контроль прекращения процесса дозирования осуществляют прямым способом, например путем установки датчиков высева на выходах высевающих элементов, либо косвенно - путем установления факта вращения вала дозирующего элемента или электропривода. Возможны и другие варианты контроля. Для предлагаемого п- канального дозирующего устройства, снабженного электроприводом, наиболее целесообразно осуществлять контроль вращения электропривода 14 по наличию или отсутствию сигнала на выходе датчика частоты вращения электропривода.
Блок 5 управления предназначай для формирования на своем выходе управляющих сигналов Пуск и Останов дозирующей системы в режимах Настройка и Работа.
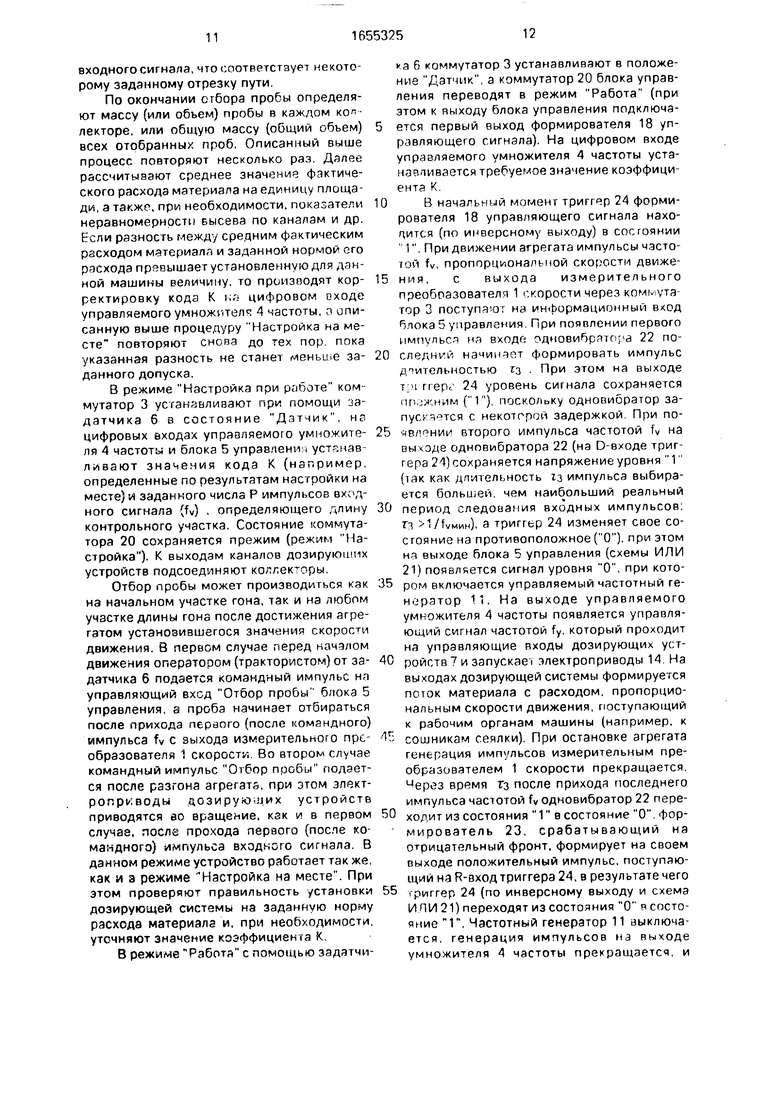
Блок 5 состоит из формирователя 18 управляющего сигнала, управляемого форми- рочателя 19 управляющего сигнала, информационные входы которых соединены между собой и образуют информационный вход блока управления, коммутатора 20, информационные входы которого подключены к выходу формирователя 19 и к первому выходу формирователя 18 и схемы ИЛИ 21, один из входов которой является входом аварийной остановки, а второй соединен с выходом коммутатора 20 (фиг 4). Формирователь 19 снабжен цифровым входом и двумя управляющими входами, один из которых является входом Отбор пробы, а второй подключен к второму выходу формирователя 18. Установка режима работы дозирующей системы производится путем подачи соответствующего сигнала (О или 1) на управляющий вход коммутатора 20, предназначенного для подключения к выходу блока 5 управления выхода формирователя 18 (в режиме Работа) или выхода формирователя 19 (в режиме Настройка).
Основные функции блока управления с учетом режимов его работы, следующие.
Формирование сигнала Пуск в режиме Работа при появлении на информационном входе блока управления импульсов входного сигнала (fv или fv ). Формирование сигнала Останов в режиме Работа или Настройка при отсутствии импульсов входного сигнала на информационном входе блока управления в течение заданного времени, которое выбирается из условия
Тз - 1 / IVMHH.
(2)
где fvMHH - наименьшее значение частоты входного сигнала в условиях нормального функционирования агрегата. Формирование в режиме Настройка сигнала Пуск при появлении на информационном входе блока управления первого же импульса входного сигнала после подачи на вход Отбор пробы командного импульса с выхода задатчика 6.
Формирование в режиме Настройка сигнала Останов при появлении (Р+1)-го (после подачи импульса Отбор пробы) импульса входного сигнала.
Формирователь 18 управляющего сигнала состоит из одновибратора 22 с поворотным запуском, формирователя 23 и D-триггера 24, D-вход которого соединен с выходом одновибратора 22 и с входом формирователя 23. Вход одновибратора 22 соединен с С-входом триггера 24, R-вход которого подключен к выходу формирователя 23. Первым выходом формирователя 18 является инверсный выход триггера 24, а вторым его выходом - выход формирователя 23. Управляемый формирователь 19 управляющего сигнала состоит из счетчика 25, схемы ИЛИ 26, RS-триггера 27, R-вход которого является входом Отбор пробы блока /правления, и D-триггера 28, D-вход которого соединен с выходом триггера 27 и с управляющим входом счетчика 25. С-вход триггера 28 подключен к информационному входу счетчика 25. S-вход триггера 27 соединен с выходом схемы ИЛИ 26, один из входов подключен к выходу счетчика 25, а второй вход соединен с S-входом триггера 28 и является вторым управляющим входом формирователя 19. Выходом формирователя 19 является выход триггера 28.
Блок 8 контроля состояния предназначен для выполнения следующих функций.
1.Формирование на своем первом выходе сигнала (например, логического сигнала уровня 1) в случае аварийной остановки хотя бы одного из электроприводов дозирующих устройств 7 (или в случае прекращения высева хотя бы одним дозирующим устройством).
2.Формирование на втором выходе, соединенном с индикатором, сигнала Индикация номера канала, содержащего информацию о номере канала (дозирующего устройства), в котором произошла аварийная остановка привода.
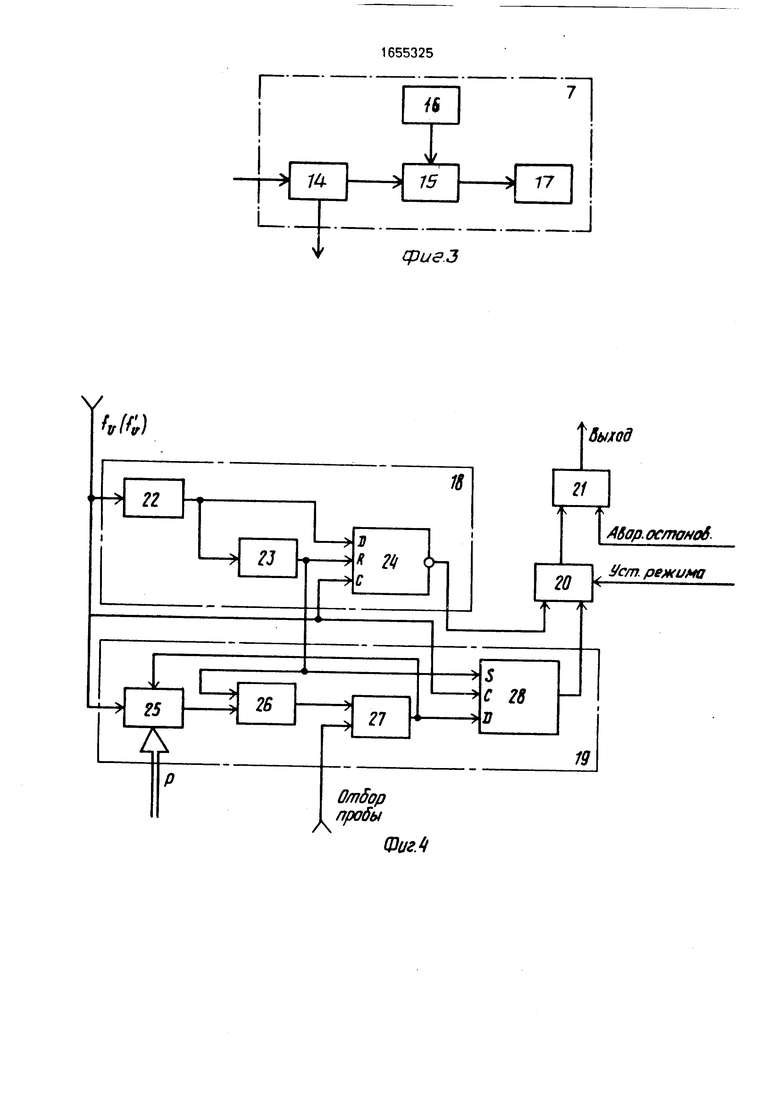
Блок 8 контроля состояния состоит из п (по числу дозирующих устройств) формирователей 29 сигнала аварийной остановки, схемы ИЛИ 30, преобразователя 31 и частотного генератора 32 (фиг. 5). В представленной на фиг. 5 схеме формирователи 29
содержат схемы ИЛИ 33, выходы которых подключены к обнуляющим R-входам счетчиков 34, и S-триггеров 35, подключенных S-входами к выходам счетчиков 34. С-входы счетчиков 34 соединены с выходом частотного генераторе. 32. Один из входов схемы ИЛИ 33 каждого формирователя 29 является одним из контрольных входов блока 8, и подключен к контрольному выходу соответствующего дозирующего устройства. Вторые входы схем ИЛИ 33 соединены между собой и с информационным входом блока 8. подключенным к выходу блока 5 управления. Схема ИЛИ 30 имеет п входов (по числу формирователей 29), подключенных к выходам формирователей 29 (триггеров 35), а выход схемы ИЛИ 30 является первым выходом блока 8. Выходы триггеров 35 подключены к выходам преобразователя 31, вход которого является вторым выходом
блока 8.
Преобразователь 31 предназначен для преобразования входного кода (характеризующего состояние выходов формирователей 29) в сигнал, необходимый для
индикации номера канала, в котором произошла аварийная остановка привода. Он может быть выполнен, например, в виде преобразователя входного кода в семисег- ментный код, электрической цепи для подключения индикаторных ламп, размещенных в индикаторе, и т.п.
Индикатор 9 предназначен для индикации технопогической или аварийной остановки электроприводов дозирующих
устройство (при помощи, например, включения индикаторной лампы), или для индикации номера канала, в котором произошла аварийная остановка.
Следует различать два вида остановки
привода при работе рассматриваемой дозирующей системы: технологическую и аварийную. Технологическая остановка электроприводов происходит, например, при остановке агрегата (при отсутствии импульсов входного сигнала fv), либо в режиме Настройка после формирования блоком управления сигнала Останов (окончание отбора пробы). Аварийная остановка электроприводов дозирующих устройств происходит при аварийных ситуациях (например, при заклинивании вала и т.п.). При технологической остановке на индикаторе включается лампа Останов. При аварийной остановке включается лампа Останов и
индикатор номера канала, в котором первой произошла аварийная остановка.
Задатчик 6 предназначен для выполнения следующих функций: установка значений кодов К и Р на цифровых входах управляемого умножителя 4 частоты и блока 5 управления; установка режима работы дозирующей системы (Настройка или Работа) путем подачи соответствующего сигнала на вход Установка режима блока 5 управления; .установка в режиме Настройка на выходе имитатора 2 скорости заданной частоты fv импульсного сигнала, имитирующего задающее воздействие (заданную рабочую скорость машины); установка имитатора 2 в одно из двух состояний: Имитатор - Датчик ; подача в режиме Настройка командного импульса на управляющий вход Отбор пробы блока 5 управления.
Устройство работав следующим образом.
Перед работой производится настройка дозирующей системы на заданную норму расхода дотируемого материала (семян, гранул, рабочей жидкости). Для установки системы в режим Настройка на управляющий вход коммутатора 20 блока 5 управления от задатчика 6 подается соответствующий сигнал, например логический сигнал уровня 1.
В режиме Настройка на месте с помощью задатчика 6 коммутатор 3 устанавливается в состояние Имитатор, на выходе имитатора 2 скорости устанавливается заданная частота fv сигнала, имитирующего заданную рабочую скорость агрегата, на цифровых входах управляемого умножителя 4 частоты и блока 5 управления устанавливаются значения кода К и заданного числа Р импульсов входного сигнала (fv1). Запись числа Р в счетчик 25 блока управления производится при напряжении уровня 1 на управляющем входе счетчика. К выходам каналов, общее количество которых равно m п, подсоединяются (подставляются) емкости (коллекторы) для сбора материала.
В исходном состоянии на выходе триггеров 27 и 28 присутствуют сигналы уровня логической Г (схемы установки триггеров устройства в исходном состоянии не показаны). Поэтому на выходе коммутатора 20, а следовательно, и на выходе блока 5 управления в исходном состоянии присутствует сигнал уровня логической 1, при котором частотный генератор 11 отключен. В связи с этим сигналы на выходе управляемого умножителя 4 частоты отсутствуют (несмотря на то, что на его информационный вход поступают импульсы входного сигнала fv ), а электроприводы дозирующих устройств не вращаются.
Далее оператором от задатчика 6 подается командный импульс Отбор пробы на R-вход триггера 27 (управляющий вход Отбор пробы блока 5 управления). Триггер 27 переходит из состояния 1 в состояние О, в результате чего на выходе счетчика 25
образуется напряжение нулевого уровня. После этого при появлении первого же импульса входного сигнала на С-входе триггера 28 на его выходе образуется напряжение уровня О. При этом на выходе блока 5
управления появляется сигнал уровня О Пуск, по которому на выходе цифрового делителя частот устанавливается начальный код No. а импульсы тактовой частоты fT с выхода управляемого частотного генераторл начинают поступать на частотные входы управляемых делителей 12 и 13 частоты. На выходе управляемого умножителя 4 частоты появляется управляющий сигнал, электроприводы 14 включаются и начинают приводить во вращение дозирующие элементы 15 дозирующих устройств 7. При появлении второго (после командного Отбор пробы) импульса выходного сигнала fv цифровой делитель 10 частот вычисляет значение кода
fv , а на выходе управляемого делителя 13 частоты Формируются импульсы частотой fy+K-fy1. В дальнейшем смена информации на выходе ЦДЧ 10 происходит с частотой fy1. Дозирующие элементы 15
вращаются с частотой К- fv , а дозируемый материал поступает в коллекторы. Одновременно импульсы частотой fv проходят на счетный вход счетчика 25. При появлении очередного импульса содержимое счетчика 25 уменьшается на единицу. После прохождения на счетный вход Р-го импульса на выходе счетчика появляется напряжение уровня 1, которое через схему ИЛИ 26 подается на S-вход триггера 27, в
результате чего на выходе триггера 27 и входе D-триггера 28 образуется напряжение уровня 1. Однако триггер 28 сохраняет прежнее нулевое состояние и переходит в состояние 1 при появлении на его С-входе
(Р+1)-го импульса входного сигнала. При этом на выходе блока 5 управления и управляющем входе управляемого умножителя 4 частоты появляется напряжение высокого уровня, вызывающее отключение управляемого частотного генератора 11. в результате чего электроприводы останавливаются и процесс дозирования прекращается.
Таким образом, пробы материала отбираются в коллекторе ровно за Р импульсов
входного сигнала, что соответствует некоторому заданному отрезку пути.
По окончании отбора пробы определяют массу (или объем) пробы в каждом коллекторе, или общую массу (общий обьем) всех отобранных проб, Описанный выше процесс повторяют несколько раз. Далее рассчитывают среднее значение фактического расхода материала на единицу площади, а также, при необходимости, показатели неравномерности высева по каналам и др. Если разность между средним фактическим расходом материала и заданной нормой его расхода превышает установленную для данной машины величину, то производят корректировку кода К ьй цифровом оходе управляемого умножптелч 4 частоты, о описанную выше процедуру Настройка на месте повторяют снова до тех пор. пока указанная разность не станет меньше заданного допуска.
В режиме Настройка при работе коммутатор 3 устанавливают при помощи за- датчика 6 в состояние Датчик, на цифровых входах управляемого умножителя 4 частоты и блока 5 управление уступав ливают значения кода К (например, определенные по результатам настройки на месте) и заданного числа Р импульсов входного сигнала (fv) , определяющего длину контрольного участка, Состояние коммутатора 20 сохраняется прежим (режим Настройка). К выходам каналов дозируюших устройств подсоединяют ко/тлек оры.
Отбор пробы может производиться как на начальном участке гона, так и на любом участке длины гона после достижения агрегатом установившегося значения скорости движения. В первом случае перед началом движения оператором (трактористом) от за- датчика 6 подается командный импульс на управляющий вход Отбор пробы блока 5 управления, а проба начинает отбираться после прихода первого (после командного) импульса fv с выхода измерительного преобразователя 1 скорости. Во втором случае командный импульс Отбор пробы подается после разгона агрегата, при этом электроприводы дозирукьиих устройств приводятся во вращение, как и в первом случае, после прохода первого (после командного) импульса входного сигнала. В данном режиме устройство работает так же, как и э режиме Настройка на месте. При этом проверяют правильность установки дозирующей системы на заданную норму расхода материала и, при необходимости, уточняют значение коэффициента К.
В режиме Работа с помощью задэтчи а 6 коммутатор 3 устанавливают в положение Датчик, а коммутатор 20 блока управления переводят в режим Работа (при этом к выходу блока управления подключается первый выход формирователя 18 управляющего сигнала). На цифровом входе управляемого умножителя 4 частоты устанавливается требуемое значение коэффициента К.
В начальный момент триггер 24 формирователя 18 управляющего сигнала находится (по инверсному выходу) в состоянии 1. При движении агрегата импульсы частотой fv, пропорциональной скорости движения, с выхода измерительного преобразователя 1 скорости через коммутатор 3 поступаю: на информационный вход блока 5 управления. При появлении первого импульс на входе одновибратора 22 последний начинает формировать импульс длительностью гз . При этом на выходе т,ч ггерс 24 уровень сигнала сохраняется ппож.ним (1), поскольку одновибратор за- пусл-ч тся с некоторой задержкой При появлении второго импульса частотой fv на выходе одновибратора 22 (на D-входе триггера 24) сохраняется напряжение уровня 1 (1ак как длшельность 1з импульса выбирается большей, чем наибольший реальный
период следования входных импульсов: гч I/TVMHH), а триггер 24 изменяет свое состояние на противоположное (О), при этом нч выходе блока 5 управления (схемы ИЛИ 21) появляется сигнал уровня О, при котором включается управляемый частотный ге- норатор 11. На выходе управляемого умножителя 4 частоты появляется управляющий сигнал частотой fy, который проходит на управляющие входы дозирующих устройств 7 и запускает электроприводы 14 На выходах дозирующей системы формируется поток материала с расходом, пропорциональным скорости движения, поступающий к рабочим органам машины (например, к
сошникам сеялки). При остановке агрегата генерация импульсов измерительным преобразователем 1 скорости прекращается. Через время тз после прихода последнего импульса частотой fv одновибратор 22 переходит из состояния 1 в состояние О, Формирователь 23, срабатывающий на отрицательный фронт, формирует на своем выходе положительный импульс, поступающий на R-вход триггера 24, в результате чего
триггер 24 (по инверсному выходу и схема ИПИ 21) переходят из состояния О п состояние 1. Частотный генератор 11 выключается, генерация импульсов на выходе умножителя 4 частоты прекращается, и
электроприводы дозирующих устройств останавливаются.
Назначение второго управляющего входа формирователя 19, соединенного со вторым выходом формирователя 18 (выходом формирователя 23), следующее. Указанная связь между блоками 18 и 19 предусмотрена для автоматической остановки электроприводов дозирующих устройств при работе дозирующей системы в режиме Настройка при отсутствии в процессе настройки входного сигнала втечение заданного времени Пусть, например, в процессе отбора пробы при движении агрегата произошла вынужденная остановка. В этом случае электро- приводы продолжают вращаться с той же частотой, что и до остановки агрегата. Остановка дозирующих устройств, R соответствии с изложенным выше принципом работы дозирующей системы в режиме Настрой- ка, может произойти только после прохождения на счетный вход счетчика 25 {P-i 1)-го импульса входного сигнала. А входные импульсы отсутствуют в связи с остановкой агрегата. Однако в режиме Настройка ра- ботает и формирователь 18 управляющего сигнала (выход которого отключен от выхода блока управления). Поэтому через время гз после прохода последнего импульса вход ного сигнала формирователь 23 формирует на своем выходе положительный импульс. который проходит через схему ИЛИ 26 на S-вход триггера 27 и переводит последний в состояние уровня 1, возвращая ТРМ самым схему формирователя 19 в исходное состояние, и одновременно поступает на S-вход триггера 28, на выходе которого появляется напряжение высокого уровня Дз лее напряжение высокого уровня образуется на управляющем входе управля- емого умножителя частоты, генератор 11 выключается, и электроприводы останавливаются.
Устройство может также работать в ре жиме Работа от имитатора. В этом случае коммутатор 3 устанавливается в состояние Имитатор. В режиме Работа от имитатора дозирующая система работает так же. как и в режиме Работа, однако при этом не обеспечивается высокая точность дози- ровгния материала в связи с тем, что устройство не работает как следящая система Однако наличие этого режима создает дополнительные удобства при эксплуатации дозирующей системы (например, в случае выхода из строя измерительного преобразователя скорости).
В процессе работы в любом режиме сигналы частотой f с контрольных выходов дозирующих устройств (например, с выходов датчиков частоты вращения электроприводов) поступают на контрольные входы блока 8 контроля состояния и, проходя че рез схемы ИЛИ 33 формирователей 29, периодически обнуляют счетчики 34, на счетные входы которых проходят импульсы от генератора 32. Триггеры 35 в начальный момент устанавливаются в положение О. При отсутствии в течение заданного времени П контрольных импульсов на одном из контрольных входов бюлока 8 контроля на выходе счетчика 34 соответствующего канала появляется сигнал уровня 1, который подается на S-вход триггера 36 этого же канала и переводит последний в состояние 1. При этом на первом выходе блока 8 контроля состояния (на выходе схемы ИЛИ 30) появляется сигнал уровня 1 который поступает на вход аварийной остановки блока 5 управления, в оезультате чего на выходе последнего формируется сигнал уровня 1. Одновременно на втором выходе блока 8 контроля состояния (на выходе преобразователя 31) появляется сигнал, содержащий информацию о номере аварийного канала, который поступаег на один из входов индикатора 9 Сигнал уровня 1 с выхода блока 5 управления поступает на другой вход индикатора 9 (для включения индикаторной лампы Останов) и одновременно - на информационный вход блока 8 кон i роля состояния ( для обнуления счетчиков 34 и исключения возможности изменения состояния триггеров 35 аварийных каналов после остановки всех электроприводов), а также на управляющий вход управляемого умножителя 4 частоты при этом генерация импульсов на его выходе прекращается и все электроприводы останавливаются
Переход одного из триггеров 35 в состояние 1 вызывает блокировку работы всего устройства. Поэтому для запуска дозирующей системы после блокировки нужно выключить и снова включить питание схемы. при этом все триггеры установятся в состояние О. При технологической остановке блокировки устройства не происходит
Формула изобретения
1. Дозирующая система сельскохозяйственной распределитепьной машины содержащая дозирующие устройства и устройство управления, состоящее из электропривода с редуктором, механически связанного с дозирующими устройствами, о т - личающаяся тем, что, с целью повышения точности дозирования, надежности работы системы и расширения функциональных возможностей, каждое дозирующее ус- тройство снабжено управляемым электроприводом, а устройство управления выполнено в виде измерительного преобразователя скорости, имитатора скорости, коммутатора, управляемого умножителя частоты, блока управления и задатчика, причем управляющие входы электроприводов соединены с выходом управляемого умножителя частоты, информационный вход которого подключен к выходу коммутатора и информационному входу блока управления, управляющие входы которого соединены с выходами задатчика, последние кроме того соединены с цифровыми входами блока управления и управляемого умножителя частоты, а также управляющими входами имитатора скорости и коммутатора, информационные входы которого подключены к выходам измерительного преобразователя скорости и имитатора скорости, при этом выход блока управления подключен к управляющему входу управляемого делителя частоты.
2. Система по п.1,отличающаяся тем, что управляемый умножитель частоты состоит из цифрового делителя частот, управляемого частотного генератора и двух управляемых делителей частоты, частотные входы которых подключены к выходу управляемого частотного генератора, а выход цифрового делителя частот соединен с цифровым входом первого управляемого делителя частоты, выход которого является выходом управляемого умножителя частоты, при этом первый вход цифрового делителя частот является информационным входом управляемого умножителя частоты, а второй вход цифрового делителя частот подключен к выходу второго управляемого
делителя частоты, причем цифровой вход второго делителя частоты и управляющий вход управляемого частотного генератора являются соответственно цифровым и уп- равляющим входами управляемого умножителя частоты.
3.Система по п.1,отличающаяся тем, что она снабжена блоком контроля состояния и индикатором, причем первый выход блока контроля состояния соединен с входом Аварийная остановка блока управления, а контрольные выходы высевающих аппаратов подключены к входам блока контроля состояния, информационный вход которого соединен с выходом блока управления и одним из входов индикатора, второй вход которого подключен к второму выходу блока контроля состояния.
4.Система поп.1,отличающаяся тем, что блок управления состоит из формирователя управляющего сигнала, управляемого формирователя управляющего сигнала, информационные входы которых соединены с информационным входом блока управления и коммутатора, информационные входы которого подключены к выходам формирователя управляющего сигнала и схемы ИЛИ, один из входов которой является входом аварийной остановки, а второй
соединен с выходом коммутатора.
5.Система по п.2, отличающаяся тем, что цифровой делитель частот управляемого умножителя частоты снабжен третьим входом, который подключен к
управляющему входу управляемого умножителя частоты.
6.Система по п.1,отличающаяся тем, что формирователь управляющего сигнала снабжен вторым управляющим входом, подключенным к второму выходу формирователя управляющего сигнала.



| название | год | авторы | номер документа |
|---|---|---|---|
| Дозирующая система сеялки | 1985 |
|
SU1329649A1 |
| Опрыскиватель | 1987 |
|
SU1521420A1 |
| Электропривод | 1986 |
|
SU1417151A1 |
| Измеритель переходных характеристик частотных прецизионных устройств | 1987 |
|
SU1620992A1 |
| Цифровой генератор функций | 1986 |
|
SU1388842A1 |
| Программируемый преобразователь напряжения произвольной формы в напряжение требуемой формы | 1990 |
|
SU1711303A1 |
| Устройство для спектрального анализа с постоянным относительным разрешением | 1982 |
|
SU1109760A1 |
| Умножитель частоты следования импульсов | 1989 |
|
SU1728964A2 |
| Контроллер измерительного преобразователя | 1988 |
|
SU1541632A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |

Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам, распределяющим сыпучий материал или рабочую жидкость по обрабатываемой площади, и может быть использовано в посевных и посадочных машинах, опрыскивателях, машинах для внесения гранулированных пестицидов и удобрений. Цель изобретения - повышение точности дозирования, надежности работы системы и расширение функциональных возможностей. Дозирующая система содержит дозирующие устройства 7 с электроприводами, управляющие входы которых соединены с выходом устройства управления, состоящего из измерительного преобразователя 1 скорости, имитатора 2 скорости, коммутатора 3, информационные входы которого подключены к выходам измерительного преобразователя 1 и имитатора 2, управляемого умножителя 4 частоты, блока 5 управления, выход которого подключен к управляющему входу управляемого умножителя 4, и задат- чика, управляющие выходы которого соединены с управляющими входами имитатора 2. коммутатора 3, с цифровыми входами управляемого умножителя 4. блока 5 управления и с управляющими входами блока 5. Информационный вход блока 5 соединен с выходом коммутатора 3 и информационным входом управляемого умножителя 4 Блок 8 контроля состояния подключен к входу Аварийная остановка блока 5 и индикатору 9, один из входов которого подключен к выходу блока 5 и ко второму выходу блока 8 контроля состояния, контрольные входы которого соединены с выходами устройства 7. 5 з.п, ф-лы, 5 ил. ё О ся ся со ND СЛ
J
cpueZ
/
быход
А6ор.ослюно6 Уст режима
0/пдор пробы
Фиг. 4
| Комаристов В Е | |||
| и др | |||
| Сельскохозяйственные машины | |||
| - М.: Колос, 1976 |
