Изобретение относится к испытаниям транспортных средств, а именно их движителей, и предназначено преимущественно для испытания двилдателей в процессе поворота в естественных (натурных) условиях.
Целью изобретения является повышение точности задания траектории движения испытуемого движитепя путем исключения влияния увода собственных движителей транспортного средства,
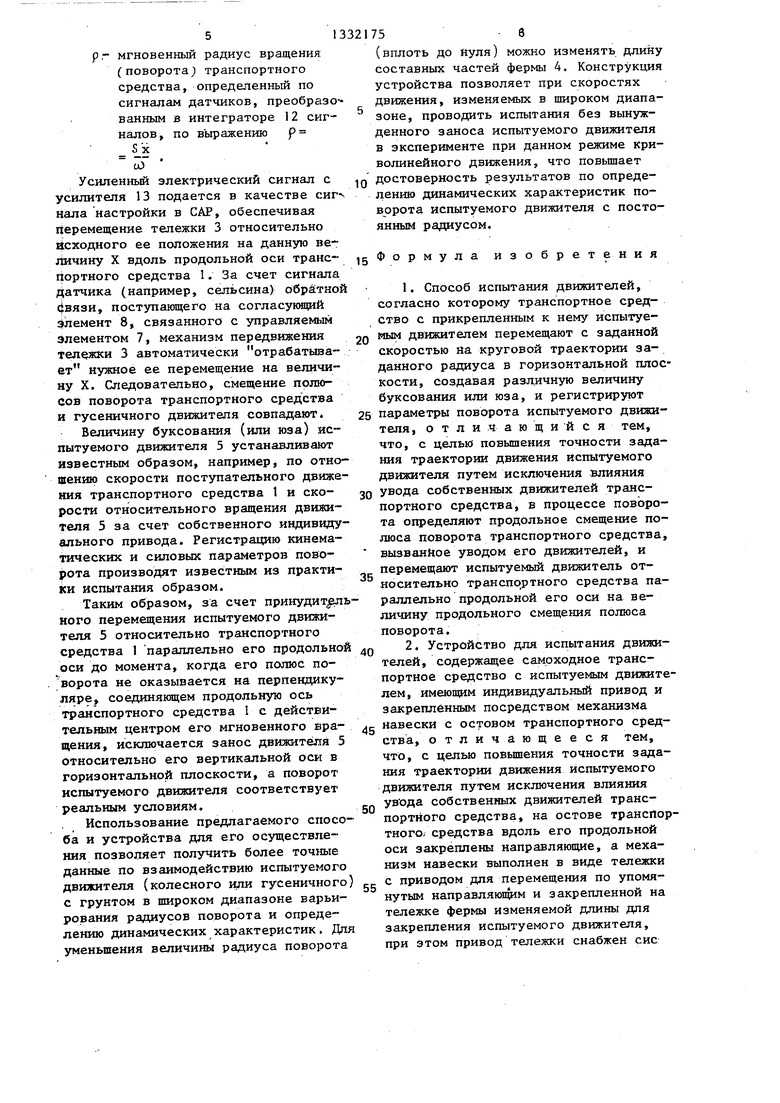
На фиг. 1 показано устройство применительно к гусеничному испытуемому движителю, осуществляющее предлагаемый способ, вид сверху; на фиг. 2 - fro же, вид сбоку; на фиг. 3 - блок- схема соединения приборов ,и датчиков,
Устройство для осуществления предлагаемого способа имеет например, в:О лесное транспортное средство. 1, к остову которого параллельно его продольной оси прикреплены две направляющие 2. На направляющих 2 остова размещена тележка 3 с возможностью перемещения только вдоль указанных направляющих (устройства, ограничивающие вертикальное и поперечное перемеще-- ния тележки, не показаны). К тележке жестко прикреплена ферма 4, выполненная из составных частей для измене:нил ее длины, к которой также жестко закреплен испытуемый движитель 5. Тележка 3 с фермой 4 образуют механизм навески движителя 5 к остов-у транспортного средства К
Движитель 5 имеет собственнь й ин-, дивидуальный привод, гусениц (не показан), а центр масс движителя 5 расположен по продольной оси фермы 4, При; чем механизм навески обеспечивает крепление движителя 5 к ферме 4 с возможностью его поворота в горизон-- тальной плоскости относительно вертикали, проходящей через центр масс движителя 5.
,Тележ1 а 3 снабжена мехаз-мзмом пв-- редвижения, состоящем из исполнительного устройства, например гидроцилиндра 6 двустороннего действия с собственным приводом обычной конструкции (.не показан), управляющий элемент 7 которого своим входом соединен с согласующим элементом Sj а вы-- ходом - одновременно с вхо):з;ом исполнительного устройства 6 и согласующим элементом 8 что образует обратную связь по перемещению тележки 3 (на фиг. 3 обратная связь показана
5
0
5
0
5
0
5
пунктирной линией), выполненную, например, путем применения сельсинов по известной схеме.
Привод тележки 3 снабжен системой С-табилизации положения тележки и, сухедовательн.о, движителя 5 по отношению к положению продольного смеще- шля полюса поворота транспортного средства з вызываемого явлением увода его шин.
Система стабилизации выполнена из отправляющей части и исполнительного устройства привода тележки 3. В качестве ксполнительного устройства 6 с управляющим элементом 7 можно, например,, использовать пгароко применя- еггую систему автоматического регулирования (САР ) положения орудия тракторного агрегата, основным элементом которой является универсальный регулятор навесной системы (УРН), в частности, обеспечивающий позиционное регулирование положения орудия. Основу САР с УРН составляют типовой гид- рораспределитешь Р75, гидравлический блок-регулятор, обеспечивающий по сигналам датчиков необходимое пере- 1У1ещение управляемого органа за счет выпуска или вьшуска жидкости из гидроцилиндра 6 двустороннего действия. В САР имеется позиционный датчик, определяющий положение механизма навески (тележки 3), которое преобразуется в механический или электрический сигнал обратной связи, подаваемый на соглас;утощий элемент 8. Для этого в САР используется механизм настройки u-i управления, обеспечивающий непрерьшкое сравнение воспринятого датчиком и переданного обратной связью сигналов с сигналом, заданным настройкой. Разность сигналов вызывает перемещение золотника регулятора и, -следовательно 9 соответствующее пере- мещерие испольштельного органа устройства 6. В качестве сигнала настройки может быть электрический сиг- нал, вырабатываемый за счет преобразования сигналов от датчиков продольного .ускорения 9, поперечного ускорения 10 и угловой скорости поворота 11 транспортного средства в горизонтальной плоскости. Датчиком положения тележки 3 на направлякщих 2, Тов фактически положения продольного смещения полюса поворота транс- портногп средства может, например.
31
служить сельсин с известной схемой включения.
Датчиками 9 и 10 могут служить широко применяемые для испытаний транспортных средств потенциометрические датчики перегрузок типа МП-68 или МП-69, а для измерения угловой скорости поворота транспортного средства 1 удобно использовать гироскопи- ческий датчик ДУС-Б-2Б унифицированной конструкции, имеющий потенциометр. Выходные сигналы потенциометров датчиков 9-11 изменяются в диа
пазоне 0-6 В. Напряжение питания всех ig неявных функций с помощью общеизвест
20
25
30
датчиков составляет 6 В постоянного тока, а гиромотора датчика 1.1-27 В (установка датчиков не показана). Погрешность измерения параметров для указанных датчиков примерно +2,5% от диапазона измерения.
Управляющая часть системы стаби- лизации выполняет преобразование электрических сигналов от датчиков 9- 11, а именно интегрирование сигнала датчика продольного ускорения транспортного средства (Sx) с последующим его делением на сигнал, поступающий от датчика 11 угловой скорости поворота ((л)) транспортного средства в горизонтальной плоскости, деление сигнала от датчика 10 поперечного ускорения (у) на сигнал датчика 9 (х) с последующим умножением на сигналах:и).
Для преобразования сигналов с датчиков 9-11 применяется интегратор 12, а для последзтощего усиления . электрического сигнала, пропорционального продольному смещению полюса поворота X, используется усилитель 13. Интегратор 12 представляет собой.устройство, объединенное с общеизвестным электронным развязывающим усилителем 13 постоянного тока, который преобразует сигнал по выходному напря- .g жению. На вход усилителя 13 подается сигнал, снимаемый с выхода датчика 9 и пропорциональный параметру х. В состав интегратора 12 входит также ши35
40
ных логарифмических блоков. Соединение датчиков и приборов показано стрелками (фиг..З). Все приборы и дат чики запитьшаются от источника энергии (схема не дана).
Испытания проводят спедутоцим образом. .
Поворачивая управляемые колеса транспортного средства 1, заставляют его передвигаться с заданной скоростью по траектории определенного радиуса. При этом тележку 3 устанавливают, предварительно совмещая продольную ось фермы 4 с задней осью транспортного средства, т.е. по линии расположения теоретического центра мгновенного вращения последнего.
При повороте колесного транспортного средства 1 вследствие явления увода шин и их бокового скольжения действительный центр мгновенного вращения смещается от теоретическЬго параллепьно продольной оси транспортного средства на величину X, опреде- .ляющую продольное смещение полюса поворота транспортного средства.
По сигналам датчиков ускорений х и у (фиг. З) и угловой скорости о) (фиг. 3), поступающим в интегратор 12 автоматически определяются следующие кинематические параметры: У
X
tgB- о
роко применяемые электронно-множитель-g где b - угол увода условной средней
ные устройства, обеспечивающие деление сигналов и их умножение. Эти устройства вьщают результат практически мгновенно (с задержкой порядка нескольких микросекунд), что повышает общее быстродействие САР. положения тележки 3 по отношению к положению продольного смещения полюса поворота X транспортного средства 1. Дпя осу55
точки задней оси транспортного средства, X ptgB ,
где X - величина продольного смещения полюса поворота транспортного средства 1, определяющая потребную величину передвижения тележки вдоль направляющих 2 остова;
ществления операции умножения электрических сигналов от датчиков используются так называемые квадраторы, вы-- ходная величина с которых имеет определенную направленность.
Направленность сохраняется для сомножителей различной полярности, что обеспечивает возможность перемещения тележки 3 (пропорционально параметру х) в любую сторону вдоль продольной оси транспортного средства 1. Уст- ройства деления сигналов, входящие в интегратор 12, работают по методу
0
25
30
.g
35
40
ных логарифмических блоков. Соединение датчиков и приборов показано стрелками (фиг..З). Все приборы и датчики запитьшаются от источника энергии (схема не дана).
Испытания проводят спедутоцим образом. .
Поворачивая управляемые колеса транспортного средства 1, заставляют его передвигаться с заданной скоростью по траектории определенного радиуса. При этом тележку 3 устанавливают, предварительно совмещая продольную ось фермы 4 с задней осью транспортного средства, т.е. по линии расположения теоретического центра мгновенного вращения последнего.
При повороте колесного транспортного средства 1 вследствие явления увода шин и их бокового скольжения действительный центр мгновенного вращения смещается от теоретическЬго па раллепьно продольной оси транспортного средства на величину X, опреде- .ляющую продольное смещение полюса поворота транспортного средства.
По сигналам датчиков ускорений х и у (фиг. З) и угловой скорости о) (фиг. 3), поступающим в интегратор 12 автоматически определяются следующие кинематические параметры: У
X
tgB- о
где b - угол увода условной средней
точки задней оси транспортного средства, X ptgB ,
где X - величина продольного смещения полюса поворота транспортного средства 1, определяющая потребную величину передвижения тележки вдоль направляющих 2 остова;
51
р.- мгновенный радиус вращения (поворота; транспортного средства, определенный по сигналам датчиков, npeoGpaiao ванным в интеграторе I2 сигналов, по выражению р S x
;ь-
Усиленный электрический сигнал с усилителя 13 подается в качестве сиг ч нала настройки в САР, обеспечивая йеремещение тележки 3 относительно исходного ее положения на данную величину X вдоль продольной оси транс- портного средства 1. За счет сигнала ;|1атчика (например, сельсина) обратной 4вязи, поступанщего на согласующий элемент 8, связанного с управляемым элементом 7, механизм передвижения тележки 3 автоматически отрабатывает нужное ее перемещение на величи ну X. Следовательно, смещение полюсов поворота транспортного средства и гусеничного движителя совпадают.
Величину буксования (или юза) испытуемого движителя 5 устанавливают известным образом, например, по отношению скорости поступательного движения транспортного средства 1 и СКО-
рости относительного вращения движителя 5 за счет собственного индивидуального привода. Регистрацию кинематических и силовых параметров рота производят известным из практики испытания образом.
Таким образом, за счет принудит ль ного перемещения испытуемого движителя 5 относительно транспортного средства 1 параллельно его продольной оси до момента, когда его полюс по- ворота не оказывается на перпендикуляре, соединяющем продольную ось транспортного средства 1 с действительным центром его мгновенного ара- щения, исключается занос двкжитёля 5 относительно его вертикальной оси в горизонтальной плоскости, а поворот испытуемого движителя соответствует реальным условиям.
Использование предлагаемого способа и устройства для его осуществления позволяет получить более точные данные по взаимодействию испытуемого движителя (колесного или гусеничного) с грунтом в широком диапазоне варьирования радиусов поворота и определению динамических характеристик. Для уменьшения величины радиуса поворота
Q 5 o 5
g
Q g Q
g
5
75-6
(вплоть до Нуля) можно изменять длину составных частей фермы 4, Конструкция устройства позволяет при скоростях движения, изменяемых в широком диапазоне, проводить испытания без вынужденного заноса испытуемого движителя в эксперименте при данном режиме криволинейного движения, что повьшает достоверность результатов по определению динамических характеристик поворота испытуемого движителя с постоянным рада:усом.
Формула изобретения
1.Способ испытания движителей, согласно которому транспортное средство с прикрепленным к нему испытуемым движителем перемещают с заданной скоростью на круговой траектории заданного радиуса в горизонтальной плоскости, создавая различную величину буксования или юза, и регистрируют параметры поворота испытуемого движителя, отличающийся тем, что, с целью повышения точности задания траектории движения испытуемого движителя путем исключения влияния увода собственных движителей транспортного средства, в процессе поворота определяют продольное смещение полюса поворота транспортного средства, вызванное уводом его движителей, и перемещают испытуемый движитель относительно транспо ртного средства параллельно продольной его оси на величину продольного смещения полюса поворота.
2.Устройство для испытания движителей, содержащее самоходное транспортное средство с испытуемым движителем, имеющим индивидуальный привод и закреплённым посредством механизма навески с остовом транспортного средства, отличающееся тем, что, с целью повьшгения точности задания траектории движения Испытуемого движителя путем исключения влияния ув ода собствен:ных движителей транспортного средства, на остове транспортного/ средства вдоль его продольной оси закреплены направляющие, а механизм навески выполнен в виде тележки
с приводом для перемещения по упомянутым направляющим и закрепленной на тележке фермы изменяемой длины для закрепления испытуемого движителя, при этом привод тележки снабжен сие
133
темой стабилизации тележки и испытуемого движителя относительно продольного смещения полюса поворота транспортного средства.
3. Устройство по п. 2, о тли- чающееся тем, что система стабилизации выполнена в виде управляющей и исполнительной.частей приво- да тележки, при этом управляющая часть выполнена в виде датчиков про58
дольного и поперечного ускорений транспортного средства, датчика угловой скорости поворота его в горизонтальной плоскости, выходы датчиков соединены с интегратором, выход которого через усилитель и согласующий элемент соединен с управляющим элементом исполнительного устройства привода тележки, а исполнительное устройство линией обратной связи связано с согласующим элементом.
У/ /////////////////////////////////////// /7/ //
Фиг,1
Редактор И. Шулла
Фиг.З
Составитель М. Ляско Техред М.Ходанич
Заказ 3823/37 Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Н. Король
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая трансмиссия с системой автоматического управления распределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов | 2019 |
|
RU2706681C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765195C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765194C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765514C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765322C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765193C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765388C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765163C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765510C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765389C1 |
Изобретение относится к испытаниям транспортных средств, а именно их движителей, и предназначено преимущественно для испытания движителей в процессе поворота в естественных (натурных) условиях. Цель изобретения - повьшение точности задания траектории движения испытуемого движителя путем исключения влияния уво,1 да собственных движителей транспорт ного средства. В процессе поворота испытуемого движителя 5 устраняется возможность его бокового заноса путем определения с помощью датчиков величины продольного смещения полюса поворота транспортного средства 1, на котррьй навешен движитель 5, и последующего смещения движителя 5 с помощью тележки 3 и гидроцилиндра 6 по направляющим 2 транспортного средства 1 вдоль его продольной оси на величину продольного смещения полюса поворота при постоянном буксовании (юзе) движителя 5, соответствующего данному смещению полюса поворота. Сигналы от датчиков поступают на интегратор и усилитель сигналов. При помощи гидроцилиндра 6 тележка 3 с движителем 5 передвигается от исходного положения на величину смещения полюса поворота автоматически. 2 с.п. ,й 1 з.т1. , 3 ил. (Л С
| Тракторостроение | |||
| Экспресс-информация, 1974, 20, с | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
