Изобретение относится к области транспортного машиностроения и может быть использовано в конструкции колесных полноприводных автотранспортных средств.
Целями предлагаемого изобретения являются улучшение управляемости и повышение устойчивости непрямолинейного движения в нормальных дорожных условиях, а также маневренности, проходимости и экономичности в экстремальных условиях движения колесных полноприводных АТС.
Указанные функциональные качества АТС в значительной степени зависят от характера распределения энергии первичного двигателя в трансмиссии полноприводного АТС между его ведущими колесами при непрямолинейном движении. Возможности в этом отношении широко используемых самоблокирующихся дифференциалов с различными типами блокирующих механизмов (чувствительные к нагрузке с фрикционными муфтами, чувствительные к скорости "вискомуфты", а также управляемые фрикционные муфты типа "Халдекс") ограничены. Эти механизмы способны перераспределять крутящие моменты только в одну сторону, от замедляющегося при повороте колеса или моста к ускоряющемуся при повороте колесу или мосту. Поэтому при непрямолинейном движении более нагруженными являются "внутренние" (по отношению к мгновенному центру поворота) колеса и ведущие мосты с неуправляемыми колесами, что является причиной увеличения момента сопротивления повороту АТС. Перераспределять же крутящие моменты в обратном направлении для компенсации момента сопротивления повороту АТС они не способны. Использование для этой цели подтормаживания более нагруженных колес не рационально из-за значительного увеличения потерь энергии, пропорциональных их частоте вращения, на порядок превышающих потери энергии в дифференциалах, пропорциональных разности частоты вращения выходных валов.
Известна трансмиссия полноприводного АТС [1], содержащая несколько ведущих мостов, в которых между главными редукторами с межколесными механическими дифференциалами (МКД) и колесными редукторами ведущих колес встроены клиноременные вариаторы с автоматически регулируемыми передаточными отношениями. Эти вариаторы обеспечивают изменение скорости движения АТС и индивидуальную коррекцию крутящих моментов каждого ведущего колеса и перераспределение крутящих моментов между наружными и внутренними колесами при повороте. Компенсация снижения частоты вращения наружных колес из-за увеличения передаточного отношения и увеличения частоты вращения внутренних колес из-за симметричного уменьшения передаточного отношения соответствующих вариаторов обеспечивается МКД за счет соответствующей разности частоты вращения полуосевых шестерен. Основным недостатком такой трансмиссии, как и подобной ей с применением вместо вариаторов планетарных многоступенчатых передач [2], является техническая сложность, увеличение габаритов, массы и стоимости трансмиссии.
Более простым устройством ведущего моста в сравнении с мостами предлагаемых в указанных патентах обладает задний мост фирмы Mitsubishi. [3] с системй AYC. Между ведомой шестерней главной пары и одной из полуосей колес этого ведущего моста включен двухступечатый редуктор с повышающей и понижающей передачами при небольшом и симметричном относительно единицы изменении передаточного отношения. При повороте автоматически включается повышающая или понижающая передача в зависимости от направления поворота, при этом дифференциальная связь блокируется. Превышение задаваемой разности частоты вращения колес относительно разности их фактической скорости движения, зависимой от радиуса поворота, обеспечивает перераспределение крутящих моментов задних колес колес от замедляющегося колесу к ускоряющемуся. При этом возникающая разность крутящих моментов и активный поворачивающий момент относительно вертикальной оси АТС увеличивается по мере увеличения радиуса поворота. Этот момент компенсирует момент сопротивления повороту АТС, который в нормальных дорожных условиях вызван прежде всего более высоким сопротивлением качению ускоряющихся наружных колес вследствие их большей весовой нагрузки при повороте в сравнении с замедляющимися внутренними. Эта система компенсирует недостаточную поворачиваемость АТС при передаточных отношениях редуктора, например, 1.05 и 0.95 в диапазоне изменения радиуса поворота 100…200 м.
Однако в случае избыточной поворачиваемости АТС при наличии поворачивающего момента, например из-за более высокого сопротивлению качению внутренних при повороте колес на грунтовой дороге, эта система может вызвать боковой занос задней оси и дестабилизировать движение АТС. Фиксированные передаточные отношения редуктора не дадут необходимого эффекта при движении АТС в условиях пониженного сцепления колес на грунте, в т.ч. при использовании шин с вездеходным протектором, в которых необходимо бесступечатое изменение разности частоты вращения колес. И кроме того, этот ведущий мост не предназначен для полноприводных двух и трехосных АТС, поскольку перераспределение крутящих между подобными ведущими мостами не проработано.
В патенте [4] изменение разности частоты вращения выходных валов дифференциала предлагается осуществлять посредством "активного" привода конических сателлитов. В качестве его предлагается шестеренный гидромотор, корпус которого должен быть жестко связан с вращающимся корпусом дифференциала, и рабочая жидкость к которому от гидронасоса должна поступать через вращающуюся относительно корпуса дифференциала полуось. Применяемый в гидравлических системах управления фрикционными муфтами автоматических коробок передач аналогичный способ подвода и отвода рабочей жидкости через радиальные зазоры между сопряженными деталями, вращающимися относительно друг друга, связан с большими объемными потерями рабочей жидкости. Относительная доля этих потерь достигает 30…40%, несмотря на низкое рабочее давление 1-1.2 МПа. А для активного гидропривода сателлитов рабочее давление должно быть, по меньшей мере, на порядок выше. Кроме того, при встраивании в корпус дифференциала одного или нескольких шестеренных гидромоторов возникает проблема соблюдения динамической балансировки вращающегося корпуса дифференциала, частота вращения которого может достигать 1200…1400 об/мин, а также существенно возрастают габариты и вес корпуса дифференциала.
В патенте [5] вместо моноблочного дифференциала предложен дифференциальный механизм, содержащий два циклоидальных редуктора с входными, выходными и управляющими звеньями, причем управляющие звенья связаны между собой кинематической связью, которая обеспечивает их одинаковую частоту вращения в противоположном направлении и дифференциальную связь выходных звеньев. Эта связь выполнена в виде двух соосных управляющих валов, расположенных параллельно оси ведущего моста. На них закреплены эксцентрики циклоидальных редукторов, а их внутренние хвостовики с помощью одинаковых конических шестерен связаны с ведущей шестерней управляющего электродвигателя с регулируемой частотой вращения, обеспечивающего "активное" управление изменением разности частоты вращения выходных звеньев дифференциального механизма. Передаточное отношение между управляющими валами и выходными звеньями благодаря циклоидальному зацеплению может достигать, по меньшей мере 50. Это позволяет использовать высокооборотный электродвигатель для управления частотой вращения управляющих валов в активном режиме. Но как и в системе AYC [3], перераспределение крутящих моментов от колеса, замедляющегося при повороте, к ускоряющемуся в данном случае невозможна, так как передача крутящего момента при передаточном отношении 1/50 вызывает самоторможение циклоидальной пары. Поэтому такой дифференциальный механизм не может использоваться в условиях избыточной поворачиваемости. Кроме того, предлагаемых для системы управления измерительных датчиков: угла поворота рулевого колеса, силы тока и частоты вращения электродвигателя недостаточно для нормального ее функционирования даже при условии только активного режима работы. Более того, сигнал углового отклонения управляемых колес не всегда может свидетельствовать о повороте АТС. При блокированном МКД в случае прямолинейного движения АТС и неодинаковых коэффициентах качения и сцепления правых и левых колес в сложных дорожных условиях возникает момент от суммарной разницы касательных сил тяги левых и правых колес. Единственным способом компенсации этого момента при блокированном МКД и сохранения прямолинейности движения является соответствующий поворот на небольшой угол управляемых колес.
В основу настоящего изобретения положена альтернативная конструкция дифференциального механизма, используемого в качестве межколесного и межосевого дифференциалов, на основе двух однорядных планетарных механизмов с солнечными шестернями в качестве управляющих звеньев, разнонаправленное вращение с варьируемой частотой которых обеспечивается объемной гидромашиной обратимого действия с дроссельным регулированием как в активном режиме работы в качестве мотора от источника постоянного давления, так и в пассивном режиме работы в качестве насоса с приводом от более нагруженного ведомого звена. В активном режиме крутящий момент перераспределяется от замедляющегося ведомого звена к ускоряющемуся, а в пассивном - от ускоряющегося к замедляющемуся. В обоих случаях варьирование частотой вращения гидромашин всех трех дифференциалов трансмиссии АТС - автоматическое.
Задачами настоящего изобретения является создание механической трансмиссии для АТС (4к4) с автоматически регулируемыми дифференциальными механизмами в раздаточной коробке и ведущих мостах с системой автоматического управления (САУ) с двумя режимами работы, которая позволит обеспечить повышение маневренности, проходимости и экономичности АТС при непрямолинейном движении в условиях пониженного и неодинакового сцепления колес, а в нормальных дорожных условиях при скоростном непрямолинейном движении - улучшить управляемость и обеспечить поперечную стабилизацию и безопасность движения АТС.
Технический результат: улучшение функциональных характеристик АТС (4к4): маневренности, проходимости, управляемости, безопасности движения и экономичности.
Решение поставленных задач достигается применением в механической трансмиссии АТС (4к4) межосевого (МОД) и межколесных (МКД) дифференциальных механизмов, содержащих по два однорядных планетарных механизма, ведомыми звеньями которых являются коронная шестерня у МОД и водила у МКД, а управляющими звеньями - солнечные шестерни, с валом дифференциальной связи, кинематически связанным с последними парой шестеренных понижающих передач с внешним зацеплением и с разнонаправленным за счет паразитной шестерни вращением при одинаковом по величине передаточном отношении, при этом размещенный в корпусе раздаточной коробке вал дифференциальной связи выполнен разрезным, состоящим из двух секций, соединенных между собой зубчатой муфтой с подвижной кареткой для включения и отключения привода заднего ведущего моста, при этом хвостовики указанных валов МКД и хвостовик передней секции разрезного вала дифференциальной связи МОД соединены с валами объемных реверсивных гидромашин, например, героторного или героллерного типа, работающих в зависимости от знака разности крутящих моментов на ведомых звеньях МКД и МОД либо в ведомом режиме насоса, либо в ведущем режиме мотора, входные и выходные полости которых посредством впускных обратных клапанов соединены со сливной магистралью гидравлической системы, снабженной подпорным клапаном на 2…3 МПа, и посредством двухпозиционных четыреходовых золотников реверса вращения входные полости гидромашин постоянно связаны с выходами дроссельных регуляторов потока, входы в которые соединены аналогичными золотниками переключения режима работы гидромашины либо с выходными полостями гидромашин в ведомом режиме, либо с нагнетательной магистралью гидравлической системы, в качестве источника давления которой использован гидроаккумулятор с клапаном автоматической зарядки, осуществляемой, например, от шестеренного гидронасоса, в ведущем режиме работы, при котором выходные полости гидромашин соединены со сливной магистралью; при этом входные и выходные полости гидромашин параллельно связаны с входами и выходами двухпозиционных двухходовых золотников разблокировки гидромашин; золотники и дроссельные регуляторы потока гидравлической системы снабжены электроуправлением, обеспечиваемой системой автоматичекого управления (САУ), функционирование которой обеспечивается датчиками частоты вращения всех колес и углов поворота управляемых колес, двухкомпонентными акселерометрами, установленными над центральными точками передней и задней оси колес, датчиком угловой скорости поворота АТС в горизонтальной плоскости, датчиками давления в магистралях гидравлической системы, а также дискретными датчиками выключения привода заднего ведущего моста, включения передачи КПП заднего хода и торможения АТС; аналоговые сигналы датчиков передаются для обработки в вычислительный блок, в котором определяются текущие значения расчетного угла управляемых колес и производной от его абсолютной величины по времени при ускоряющемся их повороте, относительных величин разности средних значений частоты вращения передних и задних колес, внутренних и наружных (при повороте) передних колес и задних колес, углов бокового увода передней и задней осей колес и их соотношения, абсолютной величины производной по времени от угловой скорости поворота АТС, а по данным датчика угловой скорости поворота АТС и расчетной величине окружной скорости движения полюса поворота, определяемой при фиксированных значениях коэффициента скоростных потерь, равного предельному значению из условия отсутствия скольжения протектора шины при ускоряющемся повороте управляемых колес, и - нулю при замедляющемся, вычисляются приближенные значения радиусов траекторий движения колес и центральных точек передней и задней оси колес и соответствующие относительные величины разности длины траекторий движения центральных точек передней и задней оси колес, наружного и внутреннего передних колес, наружного и внутреннего задних колес, которые вместе с указанной выше производной по времени от абсолютной величины расчетного угла поворота управляемых колес в качестве входных сигналов передаются в электронный блок управления частотой вращения гидромашин, который содержит три замкнутых следящего типа контура систем автоматического регулирования (САР) гидромашин МОД, переднего и заднего МКД, в которых в качестве сигналов обратных связей используются указанные выше относительные значения разности частоты вращения колес, а сигналы ошибок слежения после корректировки в изодромных звеньях поступают на вход соответствующих электронных блоков управления дроссельных регуляторов потока и обеспечивают отслеживание изменяющихся в соответствии с заданными скоростью и кривизной траектории движения АТС указанных входных сигналов и функционирование контуров САР в исходном режиме компенсации разницы пути, проходимого наружными и внутренними, передними и задними колесами, который в случае скоростного непрямолинейного движения АТС дополняется режимом поперечной стабилизации движения, включаемого ручной кнопкой на панели управления или автоматически при превышении средней величиной угла бокового увода заданного предельного значения, осуществляемого в электронном блоке управления поперечной стабилизацией движения путем ограничения величины указанного выше соотношения углов бокового увода заданным диапазоном, например, 1.03…1.1, и формирования дополнительных входных сигналов управления - положительного сигнала превышения верхнего порогового значени и отрицательного сигнала снижения относительно нижнего порогового значения, первый из которых передается в контуры САР заднего МКД и МОД при недостаточной поворачиваемости АТС, а второй при нейтральной или избыточной поворачиваемости - в контуры САР переднего МКД и МОД, и в этих контурах суммируются с указанными выше входными сигналами управления, увеличивая их при положительной величине и уменьшая их при отрицательной величине, и обеспечивают за счет соответствующего изменения частоты вращения гидромашин компенсирующей разницы крутящих моментов наружных и внутренних колес, положительной в ведущем режиме работы гидромашины - в первом случае и отрицательной в ведомом режиме работы гидромашины - во втором, при одновременной тяговой разгрузке заднего ведущего моста в первом случае и переднего ведущего - во втором; электронный блок управления поперечной стабилизацией движения снабжен управляемым по сигналу датчика выключения привода заднего ведущего моста реле с тремя постоянно замкнутыми и одним переключаемым контактом, при включении которого передача всех входных сигналов управления в контур САР МОД прекращается, а указанные дополнительные входные сигналы управления передаются в контур САР заднего МКД; управление указанными выше золотниками переключения режима работы гидромашин - индивидуальное и автоматическое для каждой гидромашины и обеспечивается цифровыми сигналами, сформированными в электронном блоке управления соленоидами золотников гидравлической системы, из ведомого режима насоса в ведущий режим мотора - при снижении текущих значений перепада давления между выходной и входной полостями гидромашин, определяемых в вычислительном блоке, до заданного порогового значения, соответствующего потерям давления в дроссельном регуляторе потока при максимальной частоте холостого вращения гидромашины в режиме насоса и минимальном радиусе поворота АТС, и при условии углового ускорения поворота АТС, а обратное переключение режима работы гидромашины - при условии углового замедления поворота и снижения указанного перепада давления до нуля при холостом вращении гидромашины в режиме мотора; автоматическое управление указанными выше золотниками реверса гидромашин обеспечивается цифровым сигналом датчика включения передачи заднего хода для гидромашины МОД и цифровым сигналом, равным нулю при выключенных соленоидах указанных золотников, и полученным в результате логического перемножения логической суммы сигнала указанного датчика и сигнала направления поворота АТС, равного нулю, например, при повороте вправо, на инверсию логического произведения этих сигналов для гидромашин переднего и заднего МКД; управление указанными выше золотниками разблокировки гидромашин, при выключенных соленоидах которых гидромашины разблокированы, осуществляется двумя цифровыми сигналами, один из которых, являющийся логической суммой сигналов от кнопки ручного включения режима разблокировки на панели управления и от датчика торможения, управляет включением двух реле с постоянно замкнутыми контактами, обеспечивая разблокировку всех трех гидромашин, а второй сигнал от ручной кнопки выключения режима поперечной стабилизации движения при выключенном приводе заднего ведущего моста обеспечивает включение одного из указанных реле, управляющего разблокировкой только гидромашины заднего МКД; в электронном блоке управления поперечной стабилизацией движения формируются предупреждающие сигналы о неисправности гидравлической системы при включении реле давления, фиксирующих снижение ниже заданного уровня давления в гидроаккумуляторе и давления подпора в сливной магистрали, и чрезмерной для текущих дорожных условий скорости движения АТС при превышении заданных предельных значений угла бокового увода либо передней, либо задней оси колес, которые передаются на панель ручного управления и световой индикации.
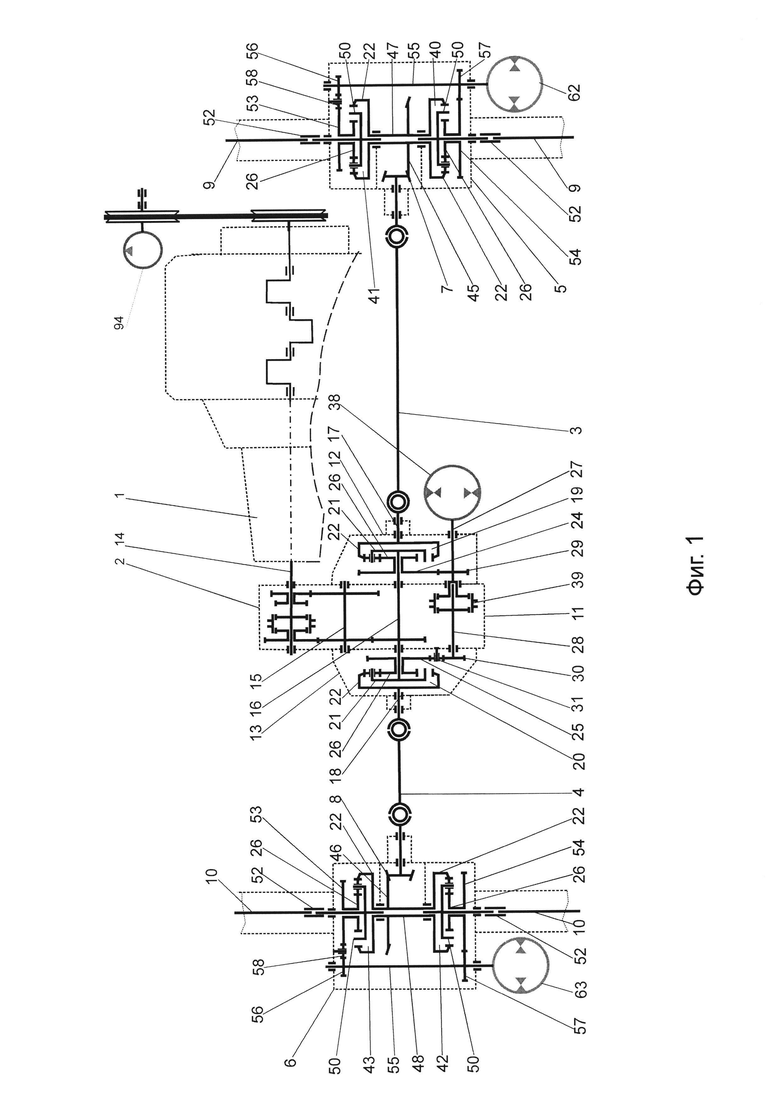
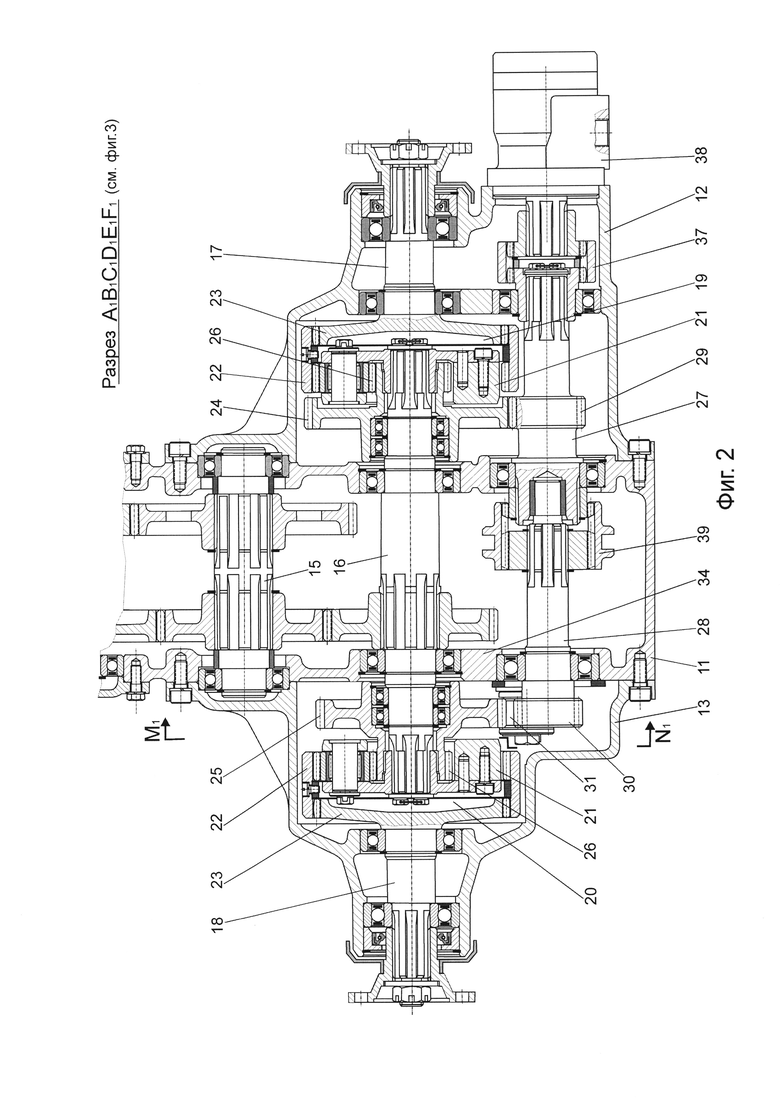
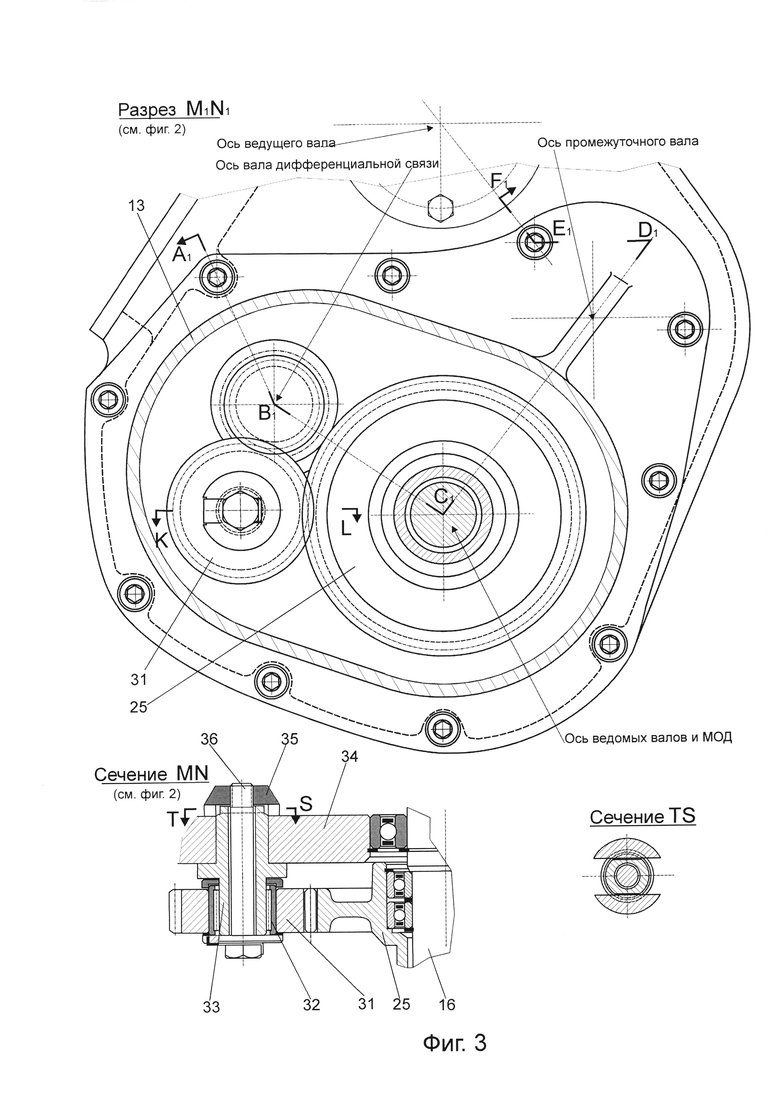
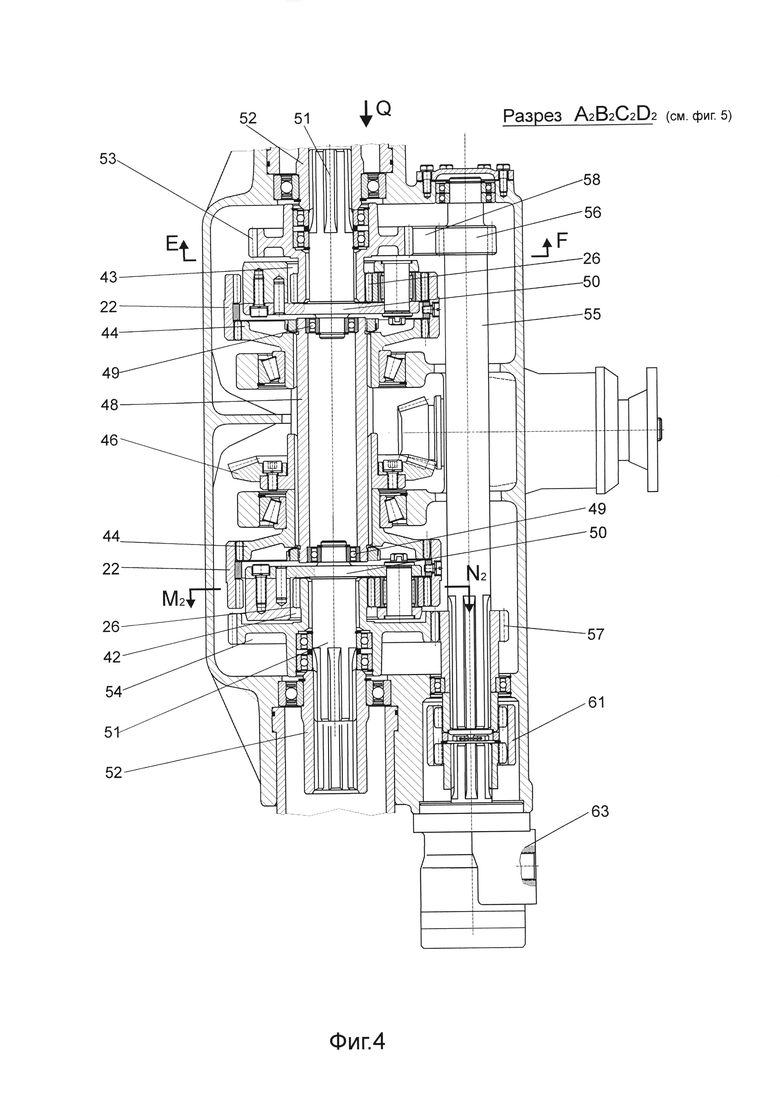
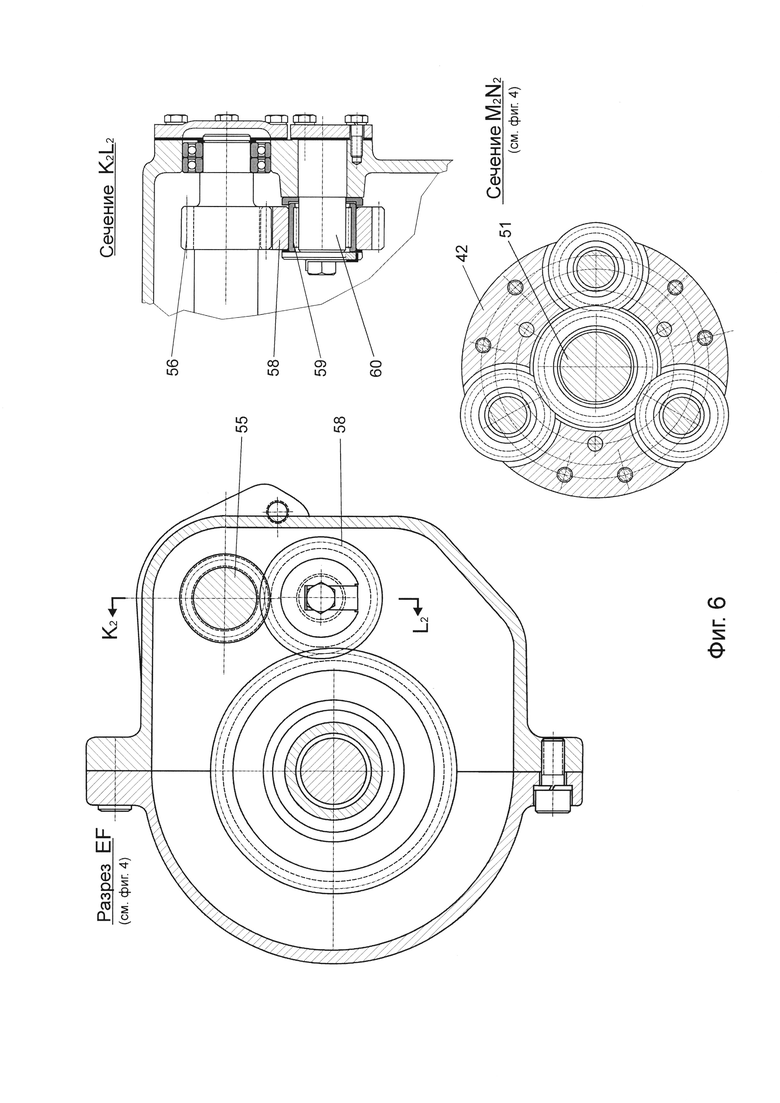
На фиг. 1 представлена кинематическая схема трансмиссии АТС; на фиг. 2 - конструкция (основной продольный разрез) нижней части раздаточной коробки с МОД; на фиг. 3 - поперечный разрез передней секции раздаточной коробки; на фиг. 4 - конструкция (основной продольный разрез) центральной части заднего ведущего моста с МКД и главной передачей; на фиг. 5 - вид по стрелке центральной части заднего моста слева; на фиг. 6 - сечения центральной части заднего ведущего моста и МКД; на фиг. 7 - схема гидравлической системы управления дифференциалами трансмиссии АТС; на фиг. 8 - блок схема системы автоматического управления (САУ) дифференциалами трансмиссии АТС; на фиг. 9 - функциональная схема вычислительного блока; на фиг. 10 - схема кругового движения АТС; на фиг. 11 - функциональная схема электронного блока управления поперечной стабилизацией движения АТС; на фиг. 12 - функциональная схема электронного блока управления частотой вращения гидромашин дифференциалов; на фиг. 13 - функциональная схема электронного блока управления соленоидами золотников гидравлической системы; на фиг. 14 - принципиальная схема панели управления и световой индикации.
Трансмиссия (фиг. 1) содержит коробку перемены передач - 1, двухступенчатую раздаточную коробку - 2 с регулируемым межосевым дифференциальным механизмом (МОД) и механизмом отключения привода заднего моста, передний и задний карданные валы - 3 и 4, ведущие мосты передний - 5 и задний - 6 с регулируемыми межколесными дифференциальными механизмами (МКД), гипоидными главными передачами - 7, 8 и ведомыми передними - 9 и задними полуосями - 10.
Корпус раздаточной коробки (фиг. 2) состоит из центральной - 11 и прифланцованных к ней передней - 12 и задней - 13 секций. В центральной секции размещены ведущий - 14 (фиг. 1), промежуточный - 15 и ведомый - 16 валы раздаточной коробки. В передней и задней секциях корпуса соосно с ведомым валом - 16 установлены валы переднего - 17 и заднего - 18 привода с наружными фланцами для соединения с карданными валами - 3 и 4. В этих же секциях корпуса раздаточной коробки размещены передний - 19 и задний - 20 однорядные планетарные механизмы МОД с водилами - 21, установленными на шлицевых наружных хвостовиках ведомого вала - 16. Коронные шестерни - 22 планетарных механизмов снабжены внутренними зубчатыми с эвольветным профилем венцами для соединения с зубчатыми полумуфтами - 23, которые выполнены заодно с валами - 17 и 18. На шейках ведомого вала - 16 с возможностью относительного вращения на подшипниках установлены ведущие передняя - 24 и задняя - 25 шестерни дифференциальной связи, каждая из которых выполнена в одном блоке с солнечными шестернями - 26 планетарных механизмов. В нижней части раздаточной коробки на четырех подшипниках размещен разрезной вал дифференциальной связи МОД, состоящий из передней - 27 и задней - 28 секций, выполненных заодно с ведомыми шестернями - 29 (передней) и 30 (задней) дифференциальной связи. При этом передние ведущая - 24 и ведомая - 29 шестерни взаимодействуют непосредственно друг с другом, а задние шестерни - 25 и 30 - через паразитную шестерню - 31 (фиг. 3), которая установлена на игольчатом подшипнике - 32 и трубчатой оси - 33, жестко закрепленной в задней стенке - 34 центральной секции - 11 корпуса с помощью фасонной гайки - 35 и стяжного болта - 36 (фиг. 3). Эти шестерни имеют минимально возможное число зубьев, при котором обеспечивается минимально возможное и одинаковое передаточные отношение передней (24, 29) и задней (25, 30) пар шестерен дифференциальной связи. В этом случае вращение передней и задней секций разрезного вала и, соответственно, солнечных шестерен - 26 возможно только с одинаковыми оборотами и в противоположном направлении, что обеспечивает дифференциальную связь между коронными шестернями - 22 переднего и заднего планетарных механизмов - 19, 20, и между валами переднего - 17 и заднего - 18 привода. Наружный хвростовик передней секции - 27 разрезного вала постоянно связан содинительной зубчатой муфтой - 37 (фиг. 2) с валом прифланцованной к передней секции - 12 корпуса раздаточной коробки объемной героторной (или героллерной) среднеооборотной гидромашины - 38. Внутренние хвостовики передней - 27 и задней - 28 секций разрезного вала снабжены зубчатой соединительной муфтой с подвижной кареткой - 39 для разъединения секций - 27 и 28 разрезного вала дифференциальной связи. при отключении привода заднего моста.
Представленная на фиг. 4 конструкция заднего МКД практически идентична конструкции переднего МКД. Оба МКД, как и МОД. содержат по два однорядных планетарных механизма - 40, 41, 42, 43 (фиг. 1), размещенных в центральной части корпусов переднего и заднего ведущих мостов - 5, 6 соосно с ведомыми полуосями - 9, 10. Ведущими звеньями этих механизмов являются коронные шестерни - 22, аналогичные по конструкции и размерам коронным шестерням МОД. Их внутренние зубчатые венцы сопряжены с зубчатыми полумуфтами - 44 (фиг. 4), которые вместе с ведомыми шестернями - 45, 46 главных передач - 7 и 8 установлены на шлицах трубчатых ведущих валов - 47 (фиг. 1) переднего и - 48 заднего ведущих мостов. В торцевых расточках трубчатого ведущего вала в обоих ведущих мостах размещены подшипники - 49 внутренних опор водил - 50, которые выполнены заодно с ведомыми валами - 51, и наружные шлицевые хвостовики которых посредством втулочных муфт - 52 связны с полуосями - 9, 10 ведущих мостов. На ведомых валах -51 с возможностью относительного вращения на подшипниках установлены выполненные в одном блоке с солнечными шестернями - 26 ведущие шестерни левая - 53 и правая - 54 дифференциальной связи. В корпусах ведущих мостов параллельно их осям устаны валы - 55 дифференциальной связи с двумя ведомыми шестернями, левыми - 56 и правыми - 57 с минимально возможным количеством зубьев. Правые шестерни - 57 взаимодействуют с ведущими шестернями - 54 непосредственно, а левые шестерни - 56 - с ведущими шестернями - 53 - через паразитные шестерни - 58 (фиг. 1 и 6), установленных на игольчатом подшипнике - 59 и оси - 60 (фиг. 5 и 6). Число зубьев ведущих и ведомых шестерен дифференциальной связи подобрано из условия равенства передаточных отношений между парами левых - 53, 56 и правых шестерен - 54, 57. В этом случае вращение вала - 55 дифференциальной связи возможно только при одинаковых оборотах и при противоположном направлении вращения ведущих шестерен - 53 и 54 и, соответственно, солнечных шестерен - 26 левых и правых планетарных механизмов. Это обеспечивает дифференциальную связь между водилами - 50 у обоих МКД и между левыми и правыми полуосями ведущих мостов. Правый хвостовик вала - 55 дифференциальной связи МКД каждого ведущего моста посредством соединительной зубчатой муфты - 61 связаны с валом прифланцованной к корпусу моста объемной героторной (или героллерной) среднеоборотной гидромашины - 62 у переднего и 63 у заднего ведущего моста. При установке гидромашин МКД по одну сторону (в данном случае с левой стороны) от продольной оси АТС позволяет использовать гидромашины с одинаковым направлением вращения.
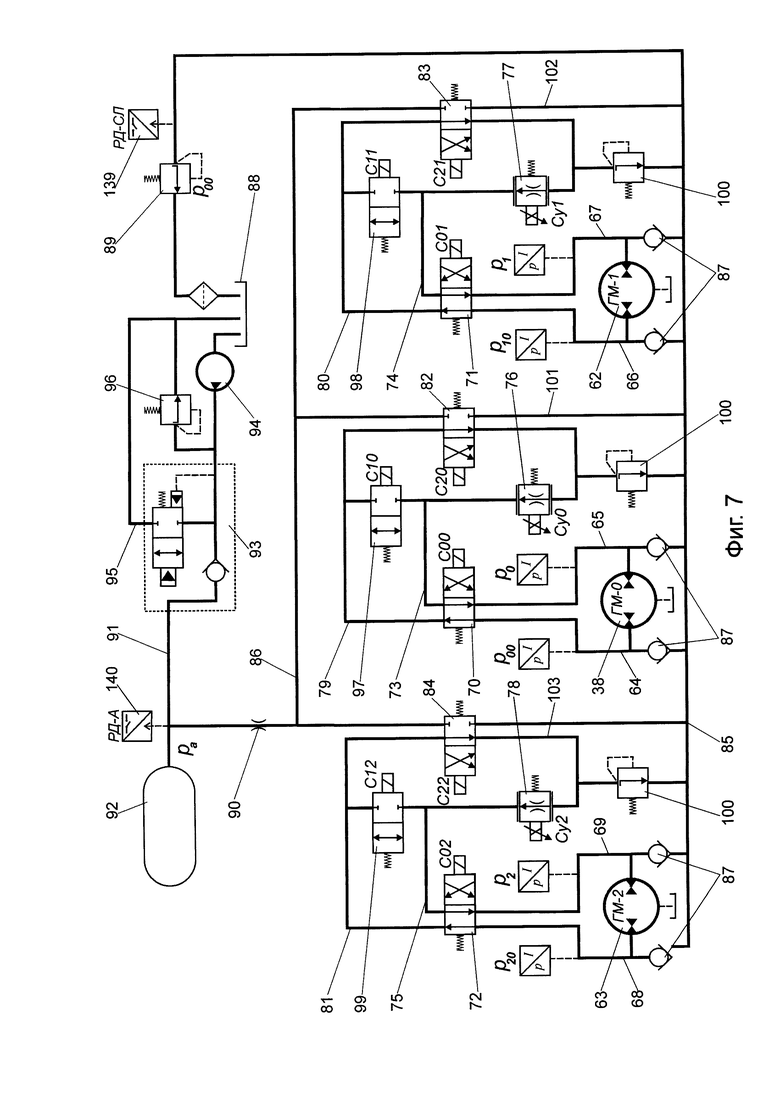
Рабочие полости гидромашин - 38 МОД и гидромашин - 62, 63 переднего и заднего МКД магистралями - 64, 65, 66, 67, 68, 69 (фиг. 7) соединены с выходами двухпозиционных, четырехходовых золотников реверса - 70 гидромашины МОД и аналогичных золотников реверса - 71, 72 гидромашин переднего и заднего МКД. Эти золотники предназначены для изменения направления вращения гидромашин, связанного с включением передачи КПП заднего хода, а у гидромашин МКД, кроме того, и с изменением направления поворота АТС. Входы каждого из указанных золотников реверса соединены магистралями - 73, 74, 75 с выходами дроссельных регуляторов потока - 76, 77, 78 с пропорциональным электроуправлением, а выходы - магистралями - 79, 80, 81 с входами двухпозиционных, четырехходовых золотников - 82, 83, 84 переключения рабочего режима гидромашин, в выключенном положении которых - режим насоса, а во включенном - режим мотора. В первом случае магистрали - 79, 80, 81 соединены со входами соответствующих указанных выше дроссельных регуляторов потока, а во втором - со сливной магистралью - 85 гидравлической системы, а входы дроссельных регуляторов потока в этом случае соединяются с нагнетательной магистралью - 86 гидравлической системы.
Таким образом, в режиме насоса рабочая жидкость циркулирует в замкнутом контуре: выход гидромашины - золотник реверса - золотник переключения рабочего режима - дроссельный регулятор потока - золотник реверса - вход гидромашины. Чтобы избежать кавитации рабочей жидкости в насосном режиме из-за ее чрезмерной скорости во входных каналах используемых в качестве гидромашин героторных гидромоторов, обе рабочие полости гидромашин связаны с помощью впускных обратных клапанов - 87 со сливной магистралью - 85, на выходе которой в резервуар - 88 установлен подпорный клапан - 89, поддерживающий в ней небольшое избыточное давление 0.2…0.3 МПа.
В режиме мотора замкнутый контур циркуляции отсутствует, рабочая жидкость из нагнетательной - 86 магистрали через золотник переключения рабочего режима, дроссельный регулятор потока, рабочие полости гидромашины поступает в сливную магистраль - 85. Нагнетательная магистраль - 86 через дроссель-демпфер - 90 соединена магистралью - 91 с рабочей камерой гидроаккумулятора - 92 и выходом клапана - 93 автоматической зарядки гидроаккумулятора. Зарядка аккумулятора осуществляется от гидронасоса - 94, например, шестеренного типа, с приводом от первичного двигателя. Второй выход клапана - 93 магистралью - 95 соединен с резервуаром - 88 рабочей жидкости. Изменение давления в магистрали - 91 сверху ограничено давлением переключения клапана - 93 на слив и снизу - величиной давления, при котором клапан - 93 переключается в положение зарядки. Это изменение давления не должно превышать 15…20% от давления зарядки. Давление на выходе гидронасоса - 94 ограничено предохранительным клапаном - 96.
Между магистралями - 73 и 79, 74 и 80, 75 и 81, связанными с входами и выходами золотников реверса - 70, 71, 72, установлены двухпозиционные двухходовые золотники - 97, 98, 99 разблокировки, в выключенном положении которых указанные магистрали соединяются между собой и связывают напрямую входные и выходные полости гидромашин. При этом момент сопротивления вращению гидромашин в ведомом режиме насоса падает до минимального значения, зависящего от уровня механических потерь при холостом вращении гидромашин. Во включенном положении золотников эти полости разъединены и гидромашины находятся в одном из двух указанных выше рабочих режимах - насоса или мотора. При прямолинейном движении и включенных золотниках - 97, 98, 99 закрытые дроссельные регуляторы потока 76, 77, 78 перекрывают магистрали 64, 66, 68, блокируя вращение гидромашин в ведомом режиме, блокируя межосевую и межколесные дифференциальные связи.
При отключении привода заднего моста гидромашина - 38 МОД блокируется перекрытой выходной магистралью - 64 при нулевом управляющем сигнале на входе электроуправляемого дроссельного регулятора потока - 76. В этом случае гидромашина - 62 переднего МКД продолжает функционировать либо в режиме насоса, либо в режиме мотора, а гидромашина - 63 заднего МКД кроме того может быть разблокированной.
Для ограничения давления на выходе гидромашин в случае работы их в режиме насоса установлены предохранительные клапаны - 100, входы которых магистралями - 101, 102, 103 связаны с выходами соответствующих золотников переключения рабочего режима и входами дроссельных регуляторов потока, а выходы - со сливной магистралью - 85.
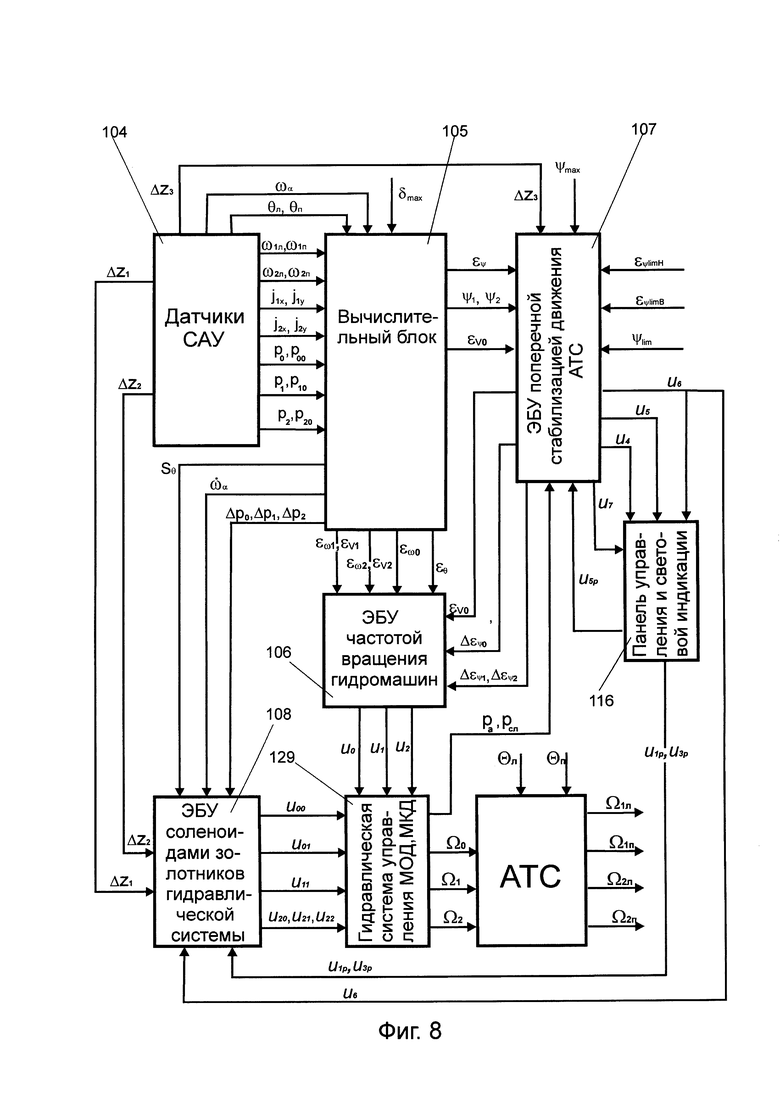
Электроуправление дроссельными регуляторами потока - 76, 77, 78 и золотниками гидравлической системы осуществляется САУ, блок-схема которой представлена на фиг. 8. Блок - 104 включает аналоговые датчики, частоты вращения Ω1л, Ω1п, Ω2л, Ω2п всех колес; углов поворота Θл, Θп передних управляемых колес; гироскоп для измерения угловой скорости Ωα поворота АТС; двухкомпонентные акселерометры для измерения поперечных и продольны составляющих J1y, J1x, J2y, J2x центростремительного ускорения центральных точек передней и задней оси колес; давления р00, р0 (МОД), р10, р1 (передний МКД), р20, р2 (задний МКД) на выходе и входе всех трех гидромашин. Кроме того в системе управления АТС установлены дискретные датчики включения передачи заднего хода z1, торможения z2 и выключения привода заднего моста z3. Соответствующие выходные сигналы датчиков ω1л, ω1п, ω2л, ω2п частоты вращения колес; θл, θп углов поворота передних колес; ωα угловой скорости поворота АТС; j1x, j1y, j2x, j2y продольных и поперечных составляющих центростремительного ускорения, р00, р0, р10, р1, р20, р2 давления передаются в электронный вычислительный блок - 105. Этот блок предназначен для расчета кинематических параметров непрямолинейного движения АТС и формирования аналоговых и дискретных управляющих сигналов и сигналов обратных связей, передаваемых в электронные блоки управления (ЭБУ) частотой вращения гидромашин - 106, поперечной стабилизацией движения - 107 и соленоидами гидравлической системы - 108.
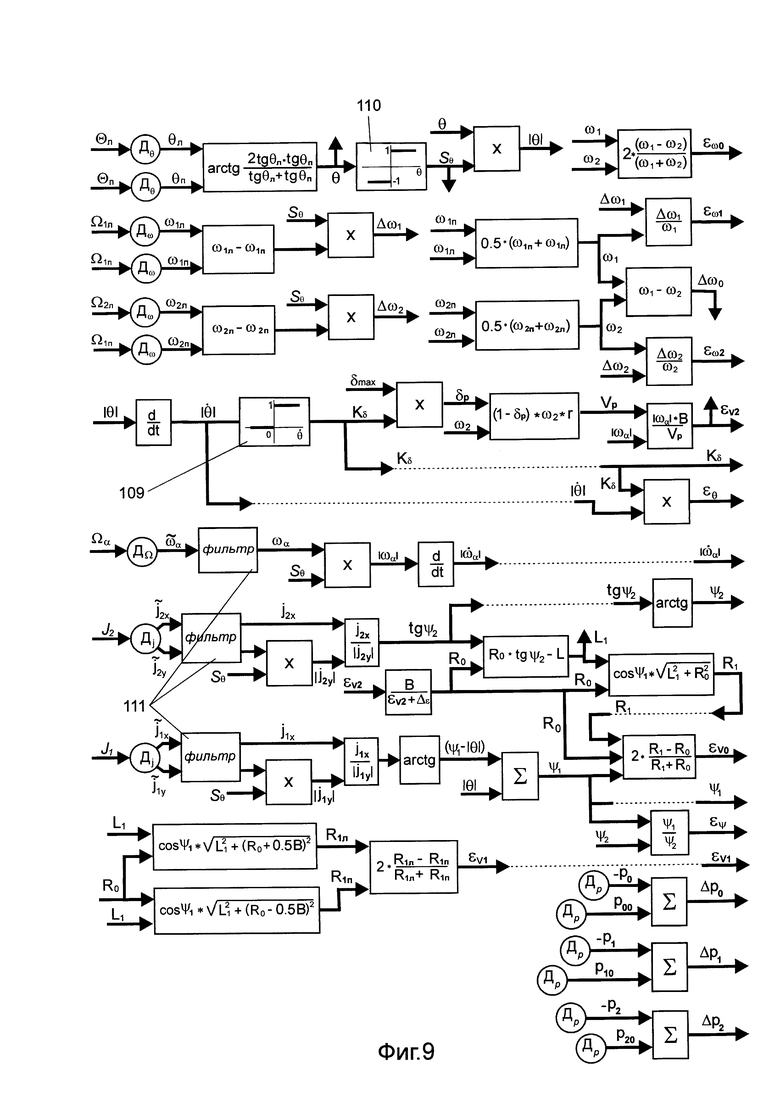
На функциональной схеме вычислительного блока (фиг. 9) представлены формулы расчета текущих значений: расчетной величины угла θ поворота передних колес, равной углу поворота "условного" переднего колеса с осью поворота пересекающей центральную точку передней оси колес, при котором радиус поворота АТС тот же, что и при двух колесах (фиг. 10), ее абсолютного значения |θ| и производной по времени d|θ|/dt; разности частоты вращения наружных (при повороте) и внутренних колес Δω1 (передних) и Δω2 (задних); средней частоты вращения ω1 передних и ω2 задних колес и разности Δω0 этих средних значений; производной по времени d|ωα|/dt от абсолютной величины угловой скорости поворота АТС; углов бокового увода ψ1 передней и ψ2 задней оси колес по величине тангенсов разности углов (ψ1-θ) и угла ψ2, явлющихся соотношениями продольных и поперечных составляющих выходных сигналов переднего и заднего акселерометров (фиг. 10); продольного смещения L1 полюса поворота относительно передней оси колес (положительного - вперед и отрицательного - назад); радиусов круговых траекторий движения полюса поворота - R0, центральной точки передней оси колес - R1 и условных точек контакта передних колес с поверхностью качения - R1л, R1п относительно мгновенного центра поворота (фиг. 10); расчетной величины окружной скорости движения полюса поворота Vp. Расчет фактической скорости V (фиг. 10) движения полюса поворота на основе показаний гироскопа и акселерометров из-за их ограниченной разрешающей способности практически невозможен. При малых скоростях движения и радиусах поворота это связано с чрезмерной погрешностью измерения центростремительного ускорения, а при высоких скоростях движения и больших радиусах поворота - с чрезмерной погрешностью измерения угловой скорости поворота АТС. Поэтому ее расчетное (приближенное) значение Vp определяется при фиксированном значении коэффциента δр скоростных потерь. Оно является произведением предельной его величины δmax, при котором начинается скольжение протектора шины относительно поверхности качения, и дискретной величины Kδ, получемой на выходе релейного звена - 109 и равной единице при ускоряющемся повороте управляемых колес и нулю при их замедляющемся повороте. При определении радиусов круговых траекторий R1л, R1п ввиду малой разницы (фиг. 10) углов ψ1п и ψ1л бокового увода передних колес косинусы этих углов приняты равными косинусу угла бокового увода передней оси ψ1 колес.
Для согласования направления поворота АТС со знаками измеряемых и рассчитываемых кинематических параметров j1y, j2y, ωα, Δω1, Δω2, θ вычислительный блок содержит релейное двухпозиционное звено - 110 (фиг. 9), на вход которого поступает текущее значение θ, а выходной дискретный сигнал - Sθ=+1 при θ>0 (например, при правом повороте) и Sθ=-1 при θ<0.
Чтобы при прямолинейном движении АТС и равенстве угловой скорости ωα поворота нулю исключить R0=∞, знаменатель формулы расчета R0 дополнен слагаемым Δε - постоянной величиной, равной 0.0001…0.0002, практически не влияющей на точность расчета R0 в пределах 0…600 м.
Значение радиуса качения колеса - r, принятого равным для всех колес, вводится при настройке САУ применительно к используемым шинам.
Для исключения высокочастотных составляющих на выходе акселерометров и гироскопа установлены фильтры - 111 низкой частоты, например активного типа RC.
Автоматическое регулирование частоты вращения гидромашин и соответствующей разности частоты вращения выходных звеньев МОД, переднего и заднего МКД при непрямолинейном движении АТС осуществляется в двух режимах.
При невысоких скоростях движения и ограниченной заданным пределом средней величины углов бокового увода передней и задней оси колес частота вращения гидромашин регулируется из условия поддержания равенства относительных значений разности частоты вращения соответствующих наружных и внутренних колес, а также относительной величины разности средних значений частоты вращения передних и задних колес с относительными значениями разности фактически необходимой скорости движения этих колес, а также относительной величины разности фактически необходимой скорости движения центральных точек передней и задней оси колес, в соответствии с рассчитанной кривизной траектории и скоростью движения этих колес при повороте АТС. В этом случае разница расчетных значений коэффициентов скоростных потерь колес, вызванных тангенциальной эластичностью шин, теоретически равна нулю. Это условие регулирования из-за недостаточно точного определения кривизны траектории и скорости движения, хотя и не обеспечивает равенство фактических значений коэффициентов скоростных потерь и соответствующих крутящих моментов, но позволяет минимизировать их разность (крутящих моментов наружных и внутренних колес, крутящих моментов на валах переднего и заднего привода раздаточной коробки) в нормальных дорожных условиях. В сложных дорожных условиях это условие позволяет до минимума снизить проскальзывание либо наружных, либо внутренних коле с пониженным коэффициентом сцепления. Этот режим работы САУ является исходным.
При превышении заданного граничного значения средней величины углов бокового увода передней и задней оси колес, либо из-за увеличении скорости движения, либо при уменьшения радиуса поворота без снижения скорости, для ограничения снижения запаса поперечной устойчивости движения автоматически включается режим поперечной стабилизации движения АТС. В этом режиме САУ обеспечивает поддержание соотношения углов бокового увода передней и задней оси колес в заданном узком диапазоне, например, в диапазоне 1.03…1.1, при котором исключается как избыточная, так и нейтральная и ограничивается недостаточная поворачиваемость АТС.
Нарушение нижней границы этого диапазона при нейтральной или избыточной поворачиваемости компенсируется стабилизирующим моментом сопротивления поворту АТС за счет отрицательной разницы крутящих моментов наружного и внутреннего передних колес, а также отрицательной разности крутящих моментов привода переднего и заднего ведущих мостов. Эта разница формируется за счет снижения частоты вращения гидромашины переднего МКД и разности частоты вращения передних колес, а также снижения частоты вращения гидромашины МОД и разности средней частоты вращения передних и задних колес. При этом гидромашины работают в ведомом режиме насоса за счет указанной разницы крутящих моментов. Режим автоматического регулирования частоты вращения гидромашины заднего МКД в этом случае не изменяется и остается исходным.
Нарушение верхней границы заданного диапазона при недостаточной поворачиваемости компенсируется стабилизирующим моментом, направленным в сторону поворота АТС, за счет положительной разницы крутящих моментов наружного и внутреннего задних колес, а также положительной разницы крутящих моментов привода переднего и заднего ведущих мостов, если статическая весовая нагрузка ведущих мостов АТС примерно одинакова. Эта разница обеспечивается за счет увеличения частоты вращения гидромашины заднего МКД и разности частоты вращения задних колес, а также увеличения частоты вращения гидромашины МОД и разности средней частоты вращения передних и задних колес. При этом гидромашины работают в ведущем режиме мотора за счет подвода рабочей жидкости из нагнетательной магистрали гидравлической системы. В этом случае исходный режим автоматического регулирования частоты вращения не меняется для гидромашины переднего МКД.
Формирование стабилизирующей разницы крутящих моментов с точки зрения обеспечения запаса сцепления и эффективности регулирования целесообразно на колесах, которые при повороте испытывает меньшую боковую нагрузку. Поэтому в первом случае эта разница формируется на передних колесах, а во втором - на задних.
Указанное перераспределение крутящих моментов между передним и задним ведущими мостами позволяет за счет тяговой разгрузки ведущего моста, на колесах которого формируются стабилизирующая разность крутящих моментов, снизить затраты энергии в процессе регулирования благодаря сужению диапазона регулирования частоты вращения гидромашины.
При увеличении разницы коэффициентов сопротивления качению наружных и внутренних и соответствующего момента, отклоняющего АТС от заданной траектории, диапазон регулирования частоты вращения гидромашин расширяется и затраты энергии в процессе регулирования возрастают.
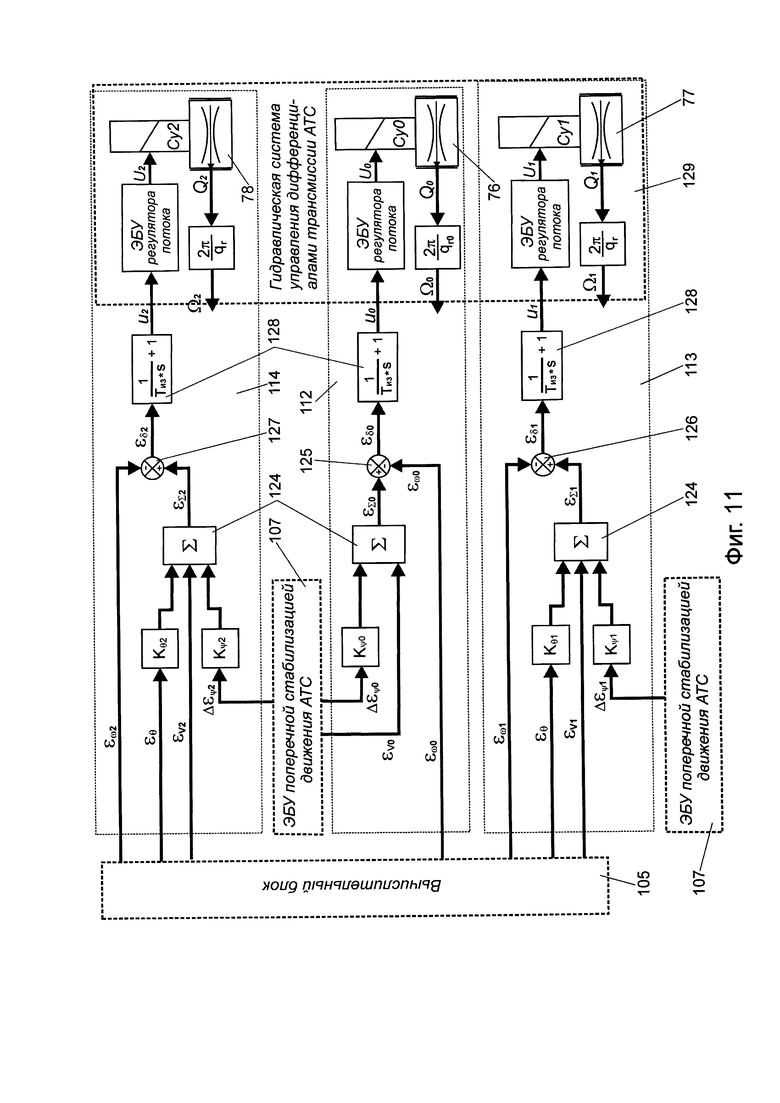
Основная функция САУ - автоматическое регулирование разности частоты вращения выходных звеньев МОД, переднего и заднего МКД выполняется ЭБУ частотой вращения гидромашин. Этот блок содержит три замкнутых обратными связями контура САР - 112, 113 и 114 следящего типа (фиг. 11). Индексы в обозначении сигналов соответствуют: "0" - контуру САР - 112 МОД, "1" - контуру САР - 113 переднего МКД и "2"- контуру САР - 114 заднего МКД.
Исполнительными звеньями САР являются электроуправляемые дроссельные регуляторы потока - 76, 77, 78, сединенные либо с выходом гидромашин (в режиме насоса), либо со входом гидромашин (в режиме мотора). Эти звенья являются практически безинерционными и пропорциональными с верхнем ограничением расхода рабочей жидкости и частоты вращения гидромашин.
В качестве сигналов отрицательных обратных связей используются текущие значения регулируемых относительных величин разности: εω0 средних значений частоты вращения передних и задних колес, разности частоты вращения наружных и внутренних передних εω1 и задних εω2 колес (фиг. 11).
В исходном режиме контуры САР функционируют, как следящие системы. В качестве входных сигналов управления используются приближенные относительные значения - εV0 разности длины траекторий движения центральных точек передней и задней оси колес, а также относительные значения - εV1 разности длины траекторий движения наружного и внутреннего передних колес и εV2 разности длины траекторий движения наружного и внутреннего задних колес.
Величина указанных сигналов управления пропорциональна угловой скорости ωα поворота АТС. При угловом отклонении управляемых колес от нейтрального положения переход от прямолинейного движения АТС к повороту и изменение угловой скорости поворота тормозится блокированными при прямолинейном движении дифференциальными, прежде всего межколесными связями. Для ускорения входа в поворот в контуры САР - 113 и 114 поступает дополнительный сигнал εθ с коэффициентами усиления Kθ1 и Kθ2, равный произведению производной по времени от абсолютной величины расчетного угла поворота управляемых колес d|θ|/dt и указанного выше дискретного сигнала Kδ. Этот входной сигнал действует только при входе АТС в поворот и равен нулю в случае выхода из поворота при d|θ|/dt<0.
Текущие расчетные значения указанных входных сигналов εV0, εV1, εV2, εθ сигналов обратных связей εω0, εω1 и εω2 определяются в вычислительном блоке (фиг. 9). Расчетные значения εV0, εV1, εV2 положительной угловой скорости поворота управляемых колес (Kδ=1) из-за заниженной расчетной скорости движения Vp превышают фактические значения этих параметров на 0.02-0.05 в зависимости от среднего значения коэффициента скоростных потерь задних колес, а при отрицательной (Kδ=0) угловой скорости из-за завышенного значения расчетной скорости движения, наоборот, ниже фактических значений этих параметров на такую же величину. Это позволяет несколько ускорить переходный процесс в указанных контурах САР при входе АТС в поворот в первом случае и при выходе из поворота во втором.
Текущие значения εV1 и εV2 передаются напрямую в ЭБУ - 106 частотой вращения гидромашин, а текущие значения εV0 - через ЭБУ - 107 поперечной стабилизацией движения АТС (фиг. 8).
В режиме поперечной стабилизации движения контуры САР выполняют функции автоматических регуляторов, обеспечивая изменение входных сигналов εV0, εV1, εV2 для поддержания соотношения углов бокового увода передней и задней оси колес внутри заданного диапазона, не допуская снижения этого параметра относительно нижнего порогового значения и превышения его относительно верхнего порогового значения, за счет соответствующего изменения частоты вращения гидромашин либо в контурах САР МОД и переднего МКД., либо в контурах САР МОД и заднего МКД.
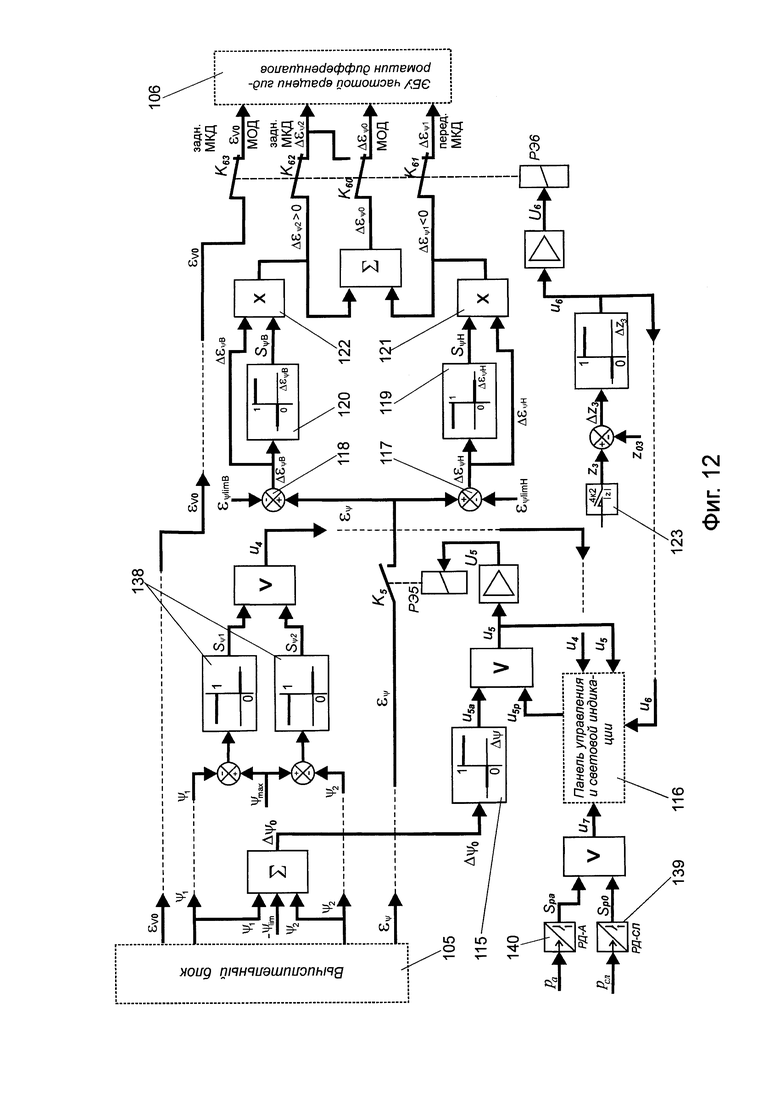
Определяемые в вычислительном блоке (фиг. 9) значения углов бокового увода и ψ1 и ψ2 величина их соотношения εψ передаются в ЭБУ (фиг. 12) поперечной стабилизацией движения. Разность суммы текущих значений ψ1 и ψ2 и заданного граничного значения удвоенной средней величины углов бокового увода ψlim, параметр Δψ0 пребразуется в релейном эвене - 115 в цифровой сигнал u5a, равный единице при Δψ0.≥0. В этом случае включается режим САУ поперечной стабилизации движения. Этот режим может быть включен и принудительно ручной кнопкой на панели управления и световой индикации - 116. Цифровой сигнал u5, являющийся логической суммой сигнала U5p ручного и u5a автоматического включения, поступает в реле РЭ5 с постоянно разомкнутыми контактами К5, которые замкнуты при равенстве u5 единице. Через замкнутые контакты включенного реле РЭ5 текущее значение параметра εψ передается на вход звеньев - 117 и 118 для сравнения с заданными нижним пороговым значением εψlimH, например, равным 1.03, и верхним εψlimB, например, равным 1.1, соответственно.
Текущие значения отклонения параметра εψ от нижнего порогового значения ΔεψH и от верхнего порогового значения ΔεψВ преобразуются релейными звеньями - 119 и 120 в дискретные сигналы SψН и SψВ. Нарушение нижнего ограничения ΔεψH отрицательно и при SψН, равной единице, аналоговая величина произведения Δεψ1=ΔεψН*SψН отрицательна. Нарушение верхнего порогового ограничения ΔεψB в положительно и при SψВ, равной единице, аналоговая величина произведения Δεψ2=ΔεψВ*SψВ положительна. Аналоговые параметры либо Δεψ1<0, либо Δεψ2>0, а также их сумма Δεψ0 в качестве дополнения входным сигналам управления передаются через контакты реле РЭ6 (фиг. 12) в соотвествующие контуры САР ЭБУ частотой вращения гидромашин (фиг. 11). В этих контурах после усиления с коэффициентами Kψi (i=0, 1, 2) они суммируются с основными сигналами управления εV0, εV1 и εV2.
При Δεψ1<0, Δεψ2=0, Δεψ0=Δεψ1 и нарушении нижнего порогового ограничения параметра εψ основные входные сигналы εV1, εV0, уменьшаются на величину аналогового параметра Δεψ1. За счет этого уменьшаются разность частоты вращения наружного и внутреннего передних колес, а также относительно меньшая за счет соотношения коэффициентов усиления Kψ1 и Kψ0 разность средних значений частот вращения передних и задних колес и обеспечивается указанное выше перераспределение крутящих моментов передних колес, компенсирующих нейтральную или избыточную поворачиваемость АТС.
При Δεψ2>0, Δεψ1=0, Δεψ0=Δεψ2 и нарушении верхнего порогового ограничения параметра εψ основные входные сигналы εV2 и εV2, наоборот, увеличиваются на величину аналогового параметра Δεψ2. За счет этого увеличиваются разность частоты вращения наружного и внутреннего задних колес, а также относительно меньшее за счет соотношения коэффициентов усиления Kψ2 и Kψ0 разность средних значений частот вращения передних и задних колес и обеспечивается указанное выше перераспределение крутящих моментов задних колес, ограничивающего недостаточную поворачиваемость АТС.
При отсутствии нарушений пороговых ограничений знак ΔεψН и ΔεψВ меняется на противоположный, дискретные сигналы SψН и SψВ равны нулю и на выходе звеньев - 121 и 122 аналоговые величины Δεψ1, Δεψ2 равны нулю. В этом случае все три контура САР работают в исходном режиме
Реле РЭ6 управляется цифровым сигналом u6 от датчика - 123 выключения привода заднего моста. Оно содержит переключаемый контакт K60, а также три постоянно замкнутых контакта K61, K62, K63. При включенном приводе заднего моста через постоянно замкнутые контакты передаются сигналы, соответственно, Δεψ1, Δεψ2, εV0, а через переключаемые - Δεψ0. При выключенном приводе заднего моста из ЭБУ поперечной стабилизации движения через контакты реле РЭ6 передается только один сигнал Δεψ0, направляемый переключаемым контактом K60 в контур - 114 САР гидромашины заднего МКД. В этом случае вне зависимости от знака отклонения параметра εψ неравные нулю текущие значения либо Δεψ1<0, либо Δεψ2>0 суммируются с основным входным сигналом управления εV2. Контур САР переднего МКД работает в исходном режиме.
Суммирование основных входных сигналов εV0, εV1, εV2 в контурах САР с дополнительными входными сигналами Δεψ0, Δεψ1, Δεψ2 и εθ выполняется в сумматорах - 124. Суммарные входные сигналы εΣ0, εΣ1, εΣ2 сравниваются с соответствующими сигналами обратных связей εω0, εω1, εω2 в звеньях - 125, 126, 127 (фиг. 11). Разница этих сигналов εδ0, εδ1, εδ2 с целью снижения статических ошибок слежения, зависимых от угла наклона статических характеристик электроуправляемых дроссельных регуляторов потока и заданной кривизны траектории движения, корректируются в изодромных звеньях - 128. Аналоговые выходные сигналы u0, u1 и u2 этих звеньев поступают на вход ЭБУ соответствующих дроссельных регуляторов потока - 76, 77, 78 гидравлической системы - 129 управления дифференциалами, вызывая изменение пропускной способности дроссельных регуляторов потока Q0, Q1, Q2, частоты вращения гидромашин Ω0, Ω1, Ω2 разности частоты вращения и разности сооветствующих крутящих моментов выходных звеньев МОД и МКД, при которых величина ошибок слежения εδ0, εδ1, εδ2 снижается до уровня указанных статических ошибок регулирования. При этом переходные процессы в контурах САР могут завершаться и при ведомом режиме (насоса), и при ведущем режиме (мотора) работы гидромашин. Это зависит от соотношения условий сцепления и качения для наружных и внутренних колес АТС.
В процессе увеличения угловой скорости ωα поворота АТС частота вращения гидромашин возрастает. Увеличение разности соответствующих наружных и внутренних колес вызывает снижение разницы их крутящих моментов и перепада давления между выходными и входными полостями гидромашин МКД. Точно также этот перепад давления изменяется в гидромашине МОД. Снижение этих перепадов давления происходит до минимального уровня, соответствующего потерям перепада давления в дроссельных регуляторах потока на регулирующих клапанах. Если при достижении этого минимального уровня перепада давления переходные процессы регулирования в контурах САР продолжаются, для дальнейшего увеличения частоты вращения гидромашины переводятся в ведущий режим работы (мотора).
Обратный переход от режима мотора к режиму насоса происходит тогда, когда в результате уменьшения входного сигнала управления возникает несоответствие между пропускной способностью дроссельного регулятора потока и разностью частоты вращения выходных звеньев соответствующего дифференциала. В этом случае возникновение разряжения во входной полости гидромашины, работающей в режиме мотора, предотвращается обратными впускными клапанами - 87 (фиг. 7), соединяющими между собой ее входную и выходную полости и перепад давления между этими полостями снижается до нуля.
Автоматическая смена режима работы гидромашин обеспечивается электроуправляемыми золотниками - 82, 83, 84 (фиг. 7) и осуществляется индивидуально для каждой гидромашины. Переход от режима насоса к режиму мотора происходит при снижении перепада давления между выходной и входной полостями гидромашины до заданного нижнего граничного значения δрн и при условии ускоряющегося поворота АТС. Это значение должно быть не ниже указанного выше минимального уровня перепада давления в гидромашине при повороте АТС с минимальным радиусом. Обратный перевод гидромашины из режима мотора в режим насоса происходит при снижении перепада давления между рабочими полостями гидромашины до нуля и при условии замедляющегося поворота АТС.
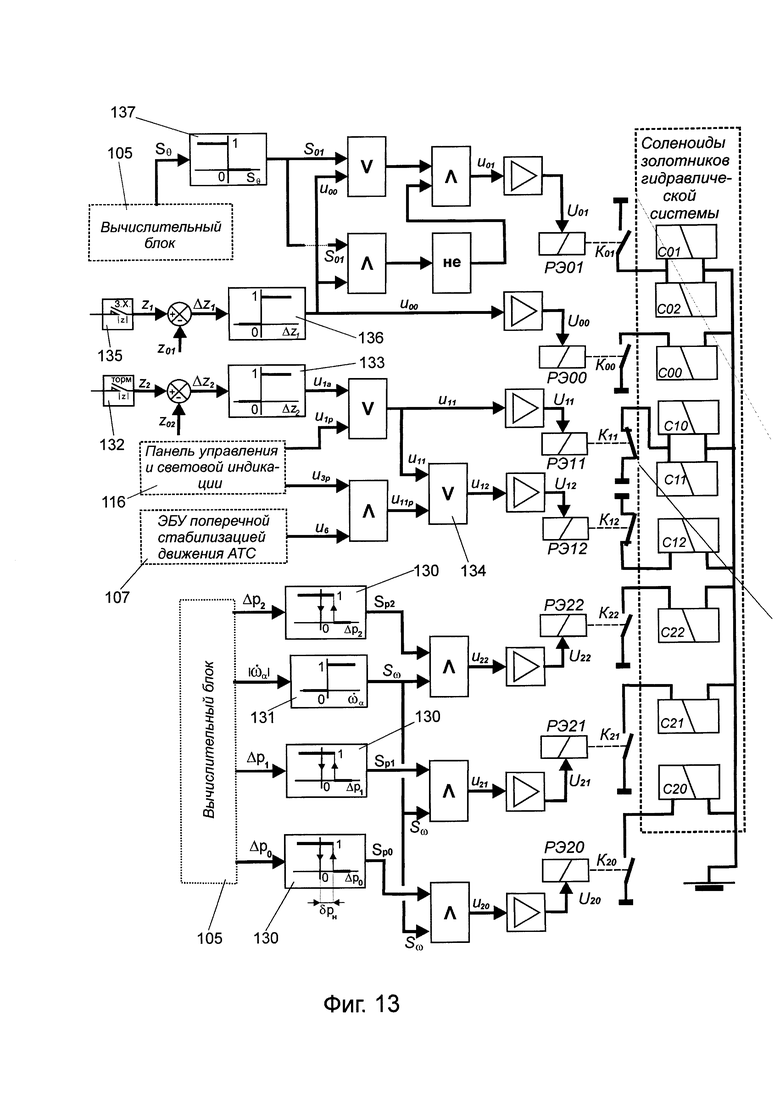
Для автоматического управления переключениями указанных золотников в вычислительном блоке (фиг. 9) определяется величина перепадов Δр0, Δр1, Δр2 давления между выходной и входной полостями гидромашин, которые передаются в ЭБУ - 108 соленоидами золотников гидравлической системы. Текущие значения этих параметров преобразуются в релейных звеньях - 130 с зоной нечувствтельности шириной δрн в цифровые сигналы Sp0, Sp1, Sp2 (фиг. 13). Из вычислительного блока передается также текущее значение углового ускорения d|ωα|/dt поворота АТС. В релейном звене - 131 этот аналоговый параметр преобразуется в цифровой сигнал Sω, равный единице при положительном значении этого параметра и нулю при отрицательном значении. Полученные в результате логического перемножения Sω^Sp0, Sω^Sp1, Sω^Sp2 цифровые управляющие сигналы u20, u21, u22 поступают на входы соответствующих реле РЭ20, РЭ21, РЭ22 с постоянно разомкнутыми контактами K20, K21, K22 (фиг. 13). При разомкнутых контактах и выключенных золотниках - 82, 83, 84 гидромашины работают в режиме насоса, при замкнутых - и включенных золотниках - в режиме мотора.
Общая разблокировка межосевой и межколесных дифференциальных связей указанными выше электроуправляемыми золотниками - 97, 98 и 99 (фиг. 7) осуществляется либо по цифровому сигналу u1p (фиг. 13) от ручной кнопки с панели управления и световой индикации - 116, либо автоматически по цифровому сигналу u1a от сигнала z2 - датчика - 132 торможения, преобразованного в релейном звене - 133 ЭБУ соленоидами золотников гидравлической системы (фиг. 13). Как было указано выше, отключение режима поперечной стабилизации движения АТС при выключенном приводе заднего ведущего моста вручную выполняется посредством индивидуальной разблокировка гидромашины заднего МКД. Для этого логическое произведения цифрового сигнала u3p от ручной кнопки с панели управления и световой индикации - 116 и указанного выше сигнала u6 от датчика - 123 (фиг. 12) выключения привода заднего моста. - цифровой сигнал u11p вместе с цифровым сигналом u11 - логической суммой u1a и u1p - поступает на вход сумматора - 134 с выходным цифровым сигналом u12. Сигнал u11 поступает на вход реле РЭ11, а сигнал u12 - на вход реле РЭ12 (фиг. 13). Первый - за счет размыкания постоянно замкнутых контактов К11 и К12 и выключения соленоидов С10, С11, С12 указанных золотников обеспечивает общую разблокировку МОД и обоих МКД вне зависимости от наличия или осутствия сигналов u3p, u6 и u11p. Второй - за счет размыкания постоянно замкнутого контакта К12 и выключения соленоида С12 золотника - 99 обеспечивает разблокировку только заднего МКД при условии u11=0, т.е. отсутствия сигналов от кнопки включения общей разблокировки и датчика торможения.
Включение соленоида С00 золотника - 70 реверса гидромашины - 38 МОД (фиг. 7) производится автоматически по сигналу z1 датчика - 135 (фиг. 13) включения передачи заднего хода КПП. Этот сигнал преобразуется релейным звеном - 136 в цифровой сигнал u00, который обеспечивает замыкание постоянно разомкнутого контакта К00 реле РЭ00 и включает указанный соленоид.
Включение соленоидов С01 и С02 золотников реверса гидромашин - 62, 63 переднего и заднего МКД (фиг. 7) - также автоматическое, но на основе цифрового вышеуказанного сигнала u00 и указанного выше дискретного сигнала Sθ, фиксирующего направление поворота передних колес, который передается из двухпозиционного релейного звена - 110 вычислительного блока (фиг. 9). Сигнал Sθ преобразуется релейным звеном - 137 в цифровой сигнал S01 (фиг. 13), равный нулю при повороте передних колес, например, в правую сторону. С помощью логических преобразований цифровой сигнал u01 включения соленоидов С01 и С02 определяется, как логическое произведение логической суммы цифровых сигналов u00, S01 и инверсии логического произведения этих же сигналов. Сигнал u01 передается на вход реле РЭ01, обеспечивая замыкание постоянно разомкнутого контакта К01 и включение указанных соленоидов (фиг. 13).
В экстремальных дорожных условиях при пониженном сцеплении колес и чрезмерной величине либо момента сопротивления повороту, либо поворачивающего момента из-за неодинакового сопротивления качению наружных и внутренних колес возможным способом поперечной стабилизации движения АТС на повороте является снижение его скорости. Для предупреждения водителя о завышенной для текущих условий непрямолинейного движения скорости АТС в ЭБУ - 107 поперечной стабилизацией движения определяется разность предельных и текущих значений углов бокового увода (ψmax-ψ1) передней и (ψmax-ψ2) задней оси колес (фиг. 12) и эти аналоговые величины преобразуются в релейных звеньях - 138 в цифровые сигналы Sψ1 и Sψ2. Нулевая величина этих входных аналоговых сигналов соответствует потере боковой устойчивости движения. В этих случаях соответствующие выходные цифровые сигналы равны единице. Цифровой сигнал u4, равный логической сумме этих сигналов, передается на панель управления и световой индикации - 116 (фиг. 8) и при равенстве единице вызывает соответствующий световой сигнал превышения допустимой для данных условий скорости движения.
Цифровой сигнал u7, равный логической сумме цифровых сигналов (фиг. 11) Sp0 и Spa от реле давления РД-СЛ - 139 и РД-А - 140 (фиг. 7) также передается на панель управления и световой индикации - 116 (фиг. 8). Эти сигналы фиксируют недостаточный уровень давления ра в гидроаккумуляторе и давления рcл подпора в сливной магистрали гидравлической системы. Сигнал u7, равный единице, вызывает световой сигнал о неисправности гидравлической системы.
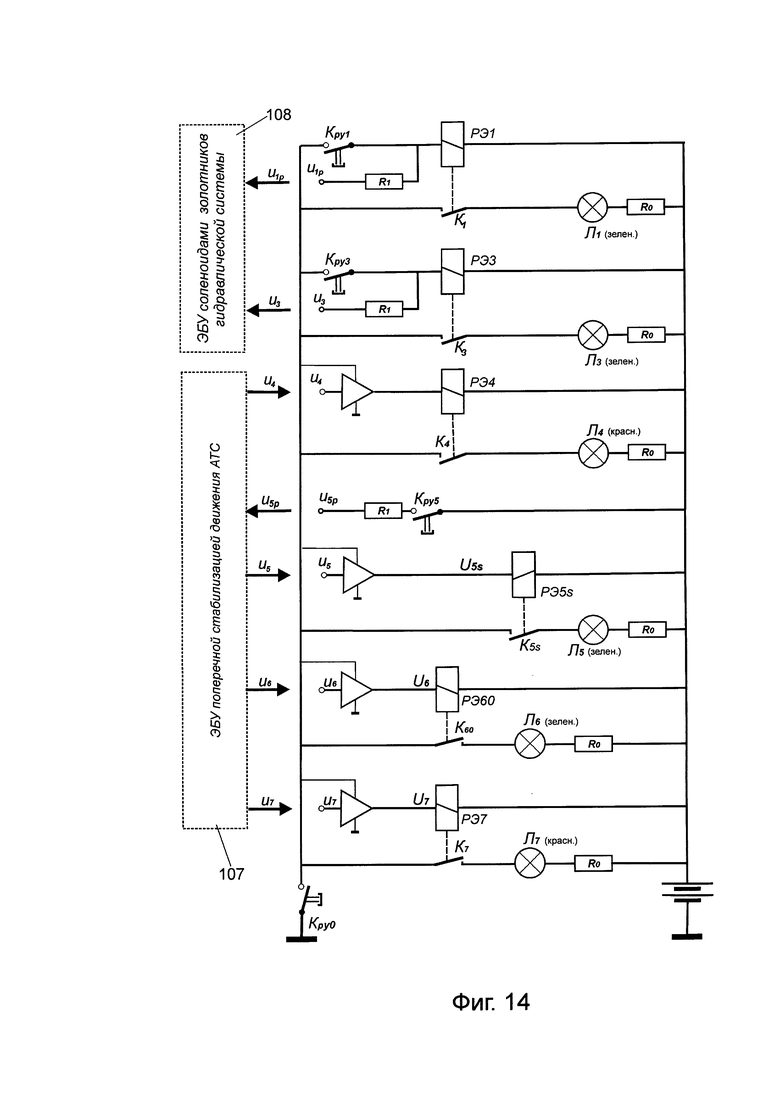
Панель управления и световой индикации - 116 (фиг. 8) снабжена четырьмя кнопками ручного управления (фиг. 14).
Кнопка Kpy0 предназначена для подключения напряжения 24 вольта и включения в работу САУ дифференциалами трансмиссии АТС.
Кнопкой Kpy1 включается режим общей разблокировки всех дифференциалов трансмиссии. При ее включении замыкается постоянно разомкнутый контакт К1 реле РЭ1, загорается зеленый световой индикатор Л1 и одновременно в ЭБУ соленоидами золотников гидравлической системы (фиг. 13) передается указанный выше сигнал u1p включения общей разблокировки.
Кнопкой Kру3 выключается режим САУ поперечной стабилизацией движения АТС при отключенном приводе заднего ведущего моста. При ее включении замыкается постоянно разомкнутый контакт К3 реле РЭ3, загорается зеленый световой индикатор Л3 и одновременно в ЭБУ соленоидами золотников гидравлической системы передается сигнал u3p, который, как уже было указано выше, вместе с сигналом u6 от датчика выключения привода заднего ведущего моста формирует сигнал u11p включения разблокировки заднего МКД.
Для ручного включения режима поперечной стабилизации движения предназначена кнопка Kpy5. Цифровой сигнал включения u5p передается в ЭБУ - 107 поперечной стабилизации движения (фиг. 12), где суммируется с сигналом u5a автоматического включения указанного режима. Суммарный сигнал u5, управляющий указанным выше реле РЭ5, из этого ЭБУ передается на панель управления и световой индикации на вход реле РЭ50 с постоянно разомкнутым контактом К50, замыкаемым при равенстве сигнала единице и включает зеленый световой индикатор Л5 режима поперечной стабилизации движения.
На панель управления и световой индикации из ЭБУ - 106 поперечной стабилизации движения передается также указанный выше цифровой сигнал u6 выключения привода заднего ведущего моста, который поступает на вход реле РЭ60 с постоянно разомкнутым контактом К60 и при равенстве единице включает зеленый световой индикатор Л6.
На панель управления и световой индикации из ЭБУ - 107 передаются два указанных выше цифровых сигнала u4 и u7 (фиг. 12) превышения допустимой для текущих условий скорости движения и неисправности гидравлической системы, соответственно. При равенстве единице эти сигналы посредством РЭ4 и РЭ7 с постоянно разомкнутыми контактами К4 и К7 обеспечивают включение красных световых индикаторов Л4 и Л7.
Работа САУ дифференциалами трансмиссии и распределением крутящих моментов между колесами АТС при различных режимах движения происходит следующим образом.
После запуска двигателя и включения кнопки Kру0 и при выключенных остальных кнопках (Kру1, Kру3, Kpy5) на панели управления (фиг. 14) САУ приводится в рабочее состояние. При трогании, разгоне и прямолинейном движении угловая скорость ωα поворота АТС, как и входные сигналы εV0, εV1, εV2 равны нулю. В этом случае соленоиды золотников реверса - 70, 71, 72 (при нейтральном положении управляемых колес и включенной передаче переднего хода) и золотников - 82, 83, 84 переключения режима работы гидромашин обесточены. При этом выходные полости гидромашин соединены со входами соответствующих дроссельных регуляторов потока (фиг. 7). При включенном приводе заднего ведущего моста обе секции - 27, 28 разрезного вала дифференциальной связи МОД в раздаточной коробке соединены подвижной кареткой - 39 зубчатой муфты (фиг. 1, 2). При нулевых входных сигналах управления дроссельные регуляторы потока - 76, 77, 78 запирают магистрали - 64, 66, 68 и выходные полости гидромашин - 38, 62, 63 (фиг. 7) блокируют валы дифференциальной связи - 55 переднего и заднего МКД и разрезной вал дифференциальной связи МОД.
При выключенном приводе заднего моста и разъединенных секциях - 27 и 28 разрезного вала дифференциальной связи МОД (фиг. 2) реле РЭ6 по сигналу датчика z3 включено, контакт K63 разомкнут и вход сигнала εV0 в контур САР гидромашины - 38 перекрыт (фиг. 12). В этом случае она блокирует переднюю секцию - 27 разрезного вала и при заторможенной солнечной шестерне - 26 переднего планетарного механизма - 19 и обеспечивает передачу крутящего на привод переднего моста. При прямолинейном движении, как и в предыдущем случае, передний и задний МКД заблокированы. При этом задние колеса в ведомом режиме вращаются синхронно.
САУ в зависимости от скорости движения, работает в двух режимах: в условиях городского движения с ограниченной скоростью - исходном режиме, а при скоростном движения на шоссе - режиме поперечной стабилизации движения, который включается автоматически, но при необходимости может быть включен и при невысокой скорости движения ручной кнопкой Kpy5 на панели управления (фиг. 14).
Поворот водителем управляемых колес при выходе АТС из прямолинейного движения происходит плавно и в течение времени поворота колес в контуры САР переднего и заднего МКД передается сигнал εθ, пропорциональный скорости поворота колес. Он ускоряет включение дроссельных регуляторов потока - 77 и 78, которые начинают пропускать рабочую жидкость и обеспечивать вращение гидромашин - 62 и 63 в ведомом режиме под действием разницы крутящих моментов внутренних и наружных колес. Начинается поворот АТС и поступление входных сигналов управления εV0, εV1, εV2, пропорциональных угловой скорости поворота АТС ωα в контуры САР МОД и обоих МКД. Пропускная способность дроссельных регуляторов потока возрастает, перепад давления между выходными и входными полостями гидромашин снижается при одновременном ускорении их вращения. При движении с ограниченной скоростью (в исходном режиме работы САУ) и при выключенной ручной кнопке Kpy5 дополнительные входные сигналы Δεψ0, Δεψ1, Δεψ2 режима поперечной стабилизации в контуры САР не передаются. При снижении перепадов давления до указанного выше граничного значения δрн золотники - 82, 83, 84 (фиг. 7) автоматически переключают гидромашин в ведущий режим работы мотора. При этом выходные полости гидромашин соединяются со сливной магистралью - 85 гидравлической системы, а входные полости через дроссельные регуляторы потока - 76, 77, 78 - с нагнетательной магистралью - 86. В первый момент в результате этого переключения перепад давления между выходными и входными полостями гидромашин меняет знак и падает до нуля, но при продолжающемся увеличении угловой скорости поворота АТС и увеличивающемся поступлении рабочей жидкости из нагнетательной магистрали - 86 через дроссельные регуляторы потока перепад давления начинает возрастать. В результате снижения величины ошибок εδ0, εδ1, εδ2 слежения до минимального значения (статических ошибок САР) переходные процессы завершаются. Величина пропускной способности дроссельных регуляторов потока и частота вращения гидромашин в этот момент не зависят от разницы крутящих моментов на выходных звеньях МОД и МКД и определяется только скоростью и кривизной траектории движения. При этом из-за указанной выше заниженной величины расчетной скорости движения и погрешности акселерометров и гироскопа установившиеся значения относительной разности частоты вращения наружных и внутренних колес и относительной разности средних значений частоты вращения передних и задних колес будут несколько завышены относительно теоретических значений из условия компенсации разности пути проходимого колесами при движении по траекториям разной кривизны.
При неодинаковом коэффициентах сопротивления качению наружных м внутренних колес возникает либо момент сопротивления повороту АТС, либо дополнительный поворачивающий момент. В первом случае поворот АТС начинается при увеличенном перепаде давления между выходной и входной полостью гидромашин и к моменту завершения переходного процесса в контурах САР гидромашин этот перепад давления не снижается до указанного выше граничного значения δрн. При этом установившаяся величина частоты вращения гидромашин достигается в их ведомом режиме работы и золотники - 82, 83, 84 сохраняют выключенное положение (фиг. 7). Во втором случае поворот АТС начинается при пониженном указанном перепаде давления и переходный процесс в контурах САР гидромашин завершается после переключения золотников - 82, 83, 84 и перевода работы гидромашин в ведущий режим мотора.
Экстремальные условия движения возникают при чрезмерно пониженном коэффициенте сцепления либо наружных, либо внутренних колес, как, например, при наличии ледяной корки на поверхности дороги под левыми колесами и отсутствия ее под правыми колесами АТС. При выходе АТС из прямолинейного движения и входе в левый поворот переходный процесс в контурах гидромашин завершается в ведомом режиме работы гидромашин (режиме насоса) из-за увеличения перепада давления между выходными и входными полостями гидромашин при разгрузке наружных колес. Ускорение вращения наружных разгруженных колес и замедление внутренних ограничивается заданной в процессе регулирования пропускной способностью дроссельных регуляторов потока. При входе в правый поворот вследствие разгрузки внутренних колес и падения указанного перепада давления включаются золотники - 82, 83, 84 и переводят работу гидромашин в ведущий режим мотора. Заданная в процессе регулирования пропускная способность дроссельных регуляторов потока предотвращает возможность снижения частоты вращения гидромашин и частоты вращения наружных более нагруженных колес и ускорение внутренних.
При движении АТС на шоссе и превышении рекомендуемой скорости на круговых участках траектории движения центростремительное ускорение может превышать рекомендуемую нормами СНИП 2.05.02-85 величину 0.2 g в полтора - два раза. В этом случае разница либо коэффициентов сопротивлении качению, либо весовой нагрузки наружных и внутренних колес может вызвать чрезмерную величину момента, отклоняющего АТС от заданной траектории движения, и соответствующее перераспределения боковой нагрузки передней и задней осей колес и их углов бокового увода. Если их средняя величина превысит заданное граничное значение, автоматически включается контроль величины соотношения, а следовательно и относительной разницы, углов бокового увода передней и задней оси колес. Если величина этой разницы не выходит за пределы 3%…10%, все три контура САР продолжают функционировать в исходном режиме. А при снижении ее ниже 3% или увеличения сверх 10% начинает функционировать режим поперечной стабилизации, и в ЭБУ этим режимом формируются дополнительные аналоговые входные сигналы Δεψ1 или Δεψ2 управления, соответственно, на изменение частоты вращения гидромашин. При включенном приводе заднего ведущего моста сигнал Δεψ1<0 поступает в контуры САР гидромашин - 62 и 38 (переднего МКД и МОД), если разница указанных углов бокового увода ниже 3%, а сигнал Δεψ2>0 поступает в контуры САР гидромашин - 63 и 38 (заднего МКД и МОД), если она выше 10%. При выключенном приводе заднего моста через реле РЭ6, управляемого датчиком - 123 (фиг. 12), каждый из указанных сигналов поступает только в контур САР гидромашины - 63 заднего МКД. Указанные дополнительные сигналы суммируются в соответствующих контурах с основными входными сигналами либо εV1 и εV0 либо εV2 и εV0 при полном приводе АТС и с сигналом εV2 при выключенном прводе заднего ведущего моста.
В случае нейтральной или избыточной поворачиваемости при Δεψ1<0 суммарный сигнал εΣ1 на входе ЭБУ дроссельного регулятора потока - 77 уменьшается, вызывая снижение разности частоты вращения наружного и внутреннего передних колес и соответствующей разности их крутящих моментов, пока разница указанных углов бокового увода не увеличится до 3%. В этом случае гидромашина - 62 переднего МКД работает в ведомом режиме насоса.
В случае превышения разницы указанных углов бокового увода сверх 10% и Δεψ2>0 суммарный сигнал εΣ2 на входе в ЭБУ дроссельного регулятора потока - 78 возрастает, вызывая увеличение разности частоты вращения наружного и внутреннего задних колес и соответствующей разности их крутящих моментов, пока указанная разница не снизится до 10%. В этом случае гидромашина - 63 заднего МКД работает в ведущем режиме мотора.
В контуре САР гидромашины МОД в уменьшение суммарного сигнала εΣ0 в первом случае вызывает снижение разности средних значений частоты вращения передних колес и соответствующую тяговую разгрузку регулируемого переднего и тяговую догрузку заднего ведущего моста, а во втором - увеличение εΣ0 и соответствующей разности средних значений частоты вращения передних и задних колес вызывает тяговую разгрузку регулируемого заднего и тяговую догрузку переднего ведущего моста. Такое перераспределение тяговой нагрузки ведущих мостов обеспечивает более эффективную работу гидромашин МКД.
При прямолинейном движении и выключенном приводе заднего ведущего моста, задние колеса движутся в ведомом режиме и их дифференциальная межколесная связь посредством вала - 55 (фиг. 1, 4) блокирована заторможенной гидромашиной - 63. При повороте АТС ее частота вращения в исходном режиме работы САУ регулируется таким же образом, как и гидромашина - 62 переднего МКД. При включенном режиме поперечной стабилизации движения аналоговые сигналы Δεψ1 и Δεψ2, как было указано поступают только в контур САР - 114 гидромашины - 63 заднего МКД (фиг. 11). Процесс управления гидромашиной - 63 в случае недостаточной поворачиваемости АТС и формирования сигнала Δεψ2>0 протекает также, как и при полном приводе АТС. Гидромашина - 63, работающая в ведущем режиме мотора, за счет давления рабочей жидкости, подводимой из гидроаккумулятора, увеличивая частоту вращения наружного заднего колеса и уменьшая частоту вращения внутреннего, создает активный крутящий момент на наружном колесе и увеличивает момент сопротивления внутреннего заднего колеса. В случае нейтральной или избыточной поворачиваемости и формирования сигнала Δεψ1 происходит снижение суммарного сигнала εΣ2 управления на входе ЭБУ дроссельного регулятора потока - 78 и частоты вращения гидромашины - 63 заднего МКД, работающей в ведомомом режиме насоса. Гидромашина - 63 за счет замедляющегося внутреннего заднего колеса, перераспределяет моменты сопротивления качению задних колес с изменением его знака у наружного колеса и увеличивая его на внутренним колесе. И таким образом в обоих случаях создаются моменты от разницы продольных реакций в контакте задних ведомых колес с дорожным полотном, перераспределяющие боковую нагрузку между передними и задними колесами. В первом случае разница углов бокового увода передних и задних колес увеличивается до 3%, а во втором снижается до 10%. Контур САР гидромашины МКД переднего ведущего моста и в том, и в другом случае работает в исходном режиме САУ.
В условиях городского движения при минимальном сопротивлении качению колес и ограниченной скорости движения режим поперечной стабилизации движения не актуален. В этом случае целесообразно не только отключение привода задних колес, но и выключение этого режима в контуре САР гидромашины заднего МКД путем ее разблокировки. Это осуществляется ручной кнопкой Kру3 на панели управления (фиг. 14). В этом случае сигнал этого включения u3p, передаваемый в ЭБУ соленоидами золотников гидравлической системы, равен единице и суммируется с сигналом u6 датчика выключения привода заднего моста. При условии равенства единице этих двух сигналов включается реле РЭ12, контакты которого размыкаются. Золотник разблокировки - 99 соединяет между собой входную и выходную полости гидромашины заднего МКД. В этом случае контур САР гидромашины - 62 переднего МКД работает в исходном режиме.
В подобных условиях движения можно включить и режим полной разблокировки гидромашин с помощью кнопки Kру1 на панели управления (фиг. 14) как при отключенном, так и при включенном приводе задних колес. В обоих случаях МКД и МОД из-за механичеких потерь на трение в гидромашинах работают подобно дифференциалам с внутренним трением.
Режим полной разблокировки гидромашин включается и автоматически при торможении АТС по сигналу датчика - 132 торможения (фиг. 13) для совмещения работы САУ дифференциалами трансмиссии с системой АБС.
При аварийной буксировке АТС и неработающем двигателе все управляющие соленоиды золотников обесточены, при этом входные и выходные полости гидромашин соединены золотниками - 97, 98, 99 (фиг. 7) между собой и гидромашины разблокированы.
Таким образом, предлагаемая механическая трансмиссия с межосевым и межколесными дифференциальными механизмами, каждый из которых содержит два однорядных планетарных механизма и вал дифференциальной связи, кинематически связанный с их солнечными шестернями парой понижающих шестеренных передач с внешним зацеплением и разнонаправленным вращением за счет паразитной шестерни и одинаковым передаточным отношением, обеспечивающий либо дифференциальную связь выходных звеньев при свободном вращении, либо регулируемую разность частоты вращения выходных звеньев при непрямолинейном движении АТС, за счет автоматически регулируемого привода указанных валов дифференциальных механизмов от объемных реверсивных гидромашин обеспечивает такое распределение крутящих моментов между колесами АТС, при котором либо компенсируется разница пути, проходимого колесами АТС, с разными траекториям движения, либо формируется стабилизирующая разность крутящих моментов наружных и внутренних колес, ограничивающая изменение соотношения углов бокового увода передней и задней осей колес заданным диапазоном. Это улучшает маневренность, АТС и позволяет повысить его проходимость и экономичность в сложных дорожных условиях, а также улучшить управляемость и повысить безопасность движения при скоростном движении. В результате повышается эффективность эксплуатации АТС как в условиях города, так и сельской местности. При оснащении АТС "вездеходными" шинами и дополнительной подстройке вычислительного блока САУ оно может эффективно использоваться и во внедорожных условиях.
Практическая реализация предлагаемых дифференциальных механизмов и САУ возможна на основе серийно выпускаемых гидромашин героторного или героллерного типа и гидравлического оборудования с электроуправлением.
Источники информации.
1. Иванов В.А. и др. Способ управления трансмиссией транспортного средства. RU Патент 2340472 С2, от 18.10.2006.
2. Котович С.В. Дифференциальный механизм для привода колес или мостов транспортного средства. RU Патент 2520224 С1, от 13.12.2012.
3. Милешкин К. //www.zr.ru/content/articles/335779-electronika_v polnom_privode_naprazhhennije_4_4/ Электроника в полном приводе: напряжение 4×4.
4. Лялин А.П. Дифференциал ведущего моста транспортного средства. RU Патент 2594269 С1, от 18.06.2015.
5. Снимщиков В.К. Управляемый межколесный (межосевой) дифференциал. RU Патент 2376515 С2, от 20.08.2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая трансмиссия АТС (4х4) с межколесным регулируемым дифференциальным механизмом и системой автоматического управления режимами работы дифференциалов при непрямолинейном движении | 2020 |
|
RU2749974C1 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |
| Трансмиссия механическая с гидравлическими дифференциальными связями ведущих колес и многорежимной системой электронного управления их блокировкой для автотранспортного средства повышенной проходимости | 2018 |
|
RU2692737C1 |
| Регулируемый межколесный дифференциальный механизм (МКДМ) для легковых автомобилей (4к2) | 2023 |
|
RU2819467C1 |
| Устройство распределения мощности в трансмиссии | 2022 |
|
RU2785241C1 |
| Транспортное средство | 1983 |
|
SU1154117A1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2106265C1 |
| МЕХАНИЗМ КОТОВСКОВА БЛОКИРОВКИ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221949C1 |
| ПРИВОД ВЕДУЩИХ МОСТОВ МНОГООСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2398684C1 |
| Привод переднего ведущего моста самоходной машины | 1975 |
|
SU709408A1 |


Изобретение относится к механической трансмиссии с межосевым и межколесным дифференциальными механизмами. Межосевой и межколесный дифференциальные механизмы содержат по два однорядных планетарных механизма и вал дифференциальной связи, связанный с их солнечными шестернями парой понижающих шестеренных передач. При этом система автоматического управления распределением крутящих моментов между колесами АТС посредством индивидуального автоматического дроссельного регулирования частоты вращения гидромашин с автоматически переключаемым режимом работы либо компенсирует разницу пути, проходимого колесами АТС, либо обеспечивает разность крутящих моментов наружных и внутренних колес. Оба указанных режима САУ обеспечиваются как при полном приводе, так и при отключенном приводе заднего ведущего моста. Достигается повышение маневренности, проходимости и экономичности. 9 з.п. ф-лы, 14 ил.
1. Механическая трансмиссия с системой автоматического управления (САУ) распределением крутящих моментов между колесами АТС (4к4) с отключаемым приводом одного из ведущих мостов, снабженная шестеренными дифференциальными межосевым (МОД) механизмом в раздаточной коробке с механизмом отключения привода заднего моста и межколесными (МКД) в главных редукторах ведущих мостов механизмами с регулируемой дифференциальной связью ведомых звеньев за счет привода управляющих звеньев от внешнего источника энергии с одинаковой и автоматически регулируемой частотой разнонаправленного вращения, содержащей датчики частоты вращения колес, углов поворота передних управляемых колес, угловой скорости поворота АТС, включения передачи КПП заднего хода и торможения, двухкомпонентные акселерометры, размещенные над центральными точками передней и задней осей колес, и вычислительный блок обработки их аналоговых сигналов, а также соответствующие электронные блоки управления и панель управления и световой индикации, отличающаяся тем, что с целью повышения маневренности, проходимости и экономичности АТС в сложных дорожных условиях и поперечной стабилизации непрямолинейного при повышенных скоростях движения в нормальных дорожных условиях каждый из указанных дифференциальных механизмов содержит два однорядных планетарных механизма, ведомыми звеньями которых являются водила у МКД и коронные шестерни у МОД, а управляющими звеньями - солнечные шестерни, и вал дифференциальной связи, кинематически связанный с последними парой шестеренных понижающих передач с внешним зацеплением и разнонаправленным за счет паразитной шестерни вращением при одинаковом по величине передаточном отношении, хвостовик которого соединен с валом реверсивной объемной гидромашины, например, героторного или героллерного типа, работающей в зависимости от направления разности крутящих моментов на ведомых звеньях планетарных механизмов либо в ведомом режиме насоса, либо в ведущем режиме мотора, при этом выходные полости гидромашин указанных дифференциальных механизмов в первом случае и входные полости гидромашин во втором случае соединены с электроуправляемыми дроссельными регуляторами потока, являющимися исполнительными механизмами указанной выше САУ, содержащей гидравлическую систему с источником давления, электроуправляемыми золотниками и датчиками давления, которая при непрямолинейном движении АТС обеспечивает индивидуальное автоматическое регулирование величины расхода рабочей жидкости через каждый из указанных регуляторов потока и, соответственно, частоты вращения указанных гидромашин и разности частот вращения ведомых звеньев дифференциальных механизмов в двух рабочих режимах: исходном режиме компенсации разницы пути, проходимого наружными и внутренними, передними и задними ведущими колесами с неодинаковыми траекториями движения при повороте АТС и в автоматически включаемом при увеличенной средней величине угла бокового увода осей колес режиме поперечной стабилизации движения АТС с ограничением заданным диапазоном величины соотношения углов бокового увода передней и задней осей колес посредством формирования компенсирующей разницы крутящих моментов наружных и внутренних колес при полном приводе за счет снижения частоты вращения гидромашин переднего МКД и МОД, работающих в ведомом режиме насоса, в случае избыточной поворачиваемости и за счет увеличения частоты вращения гидромашин МОД и заднего МКД, работающих в ведущем режиме мотора от источника давления гидравлической системы, в случае недостаточной поворачиваемости, а при выключенном приводе заднего ведущего моста в аналогичных случаях за счет снижения или увеличения частоты вращения только гидромашины заднего МКД соответственно.
2. Механическая трансмиссия по п. 1, отличающаяся тем, что указанный в п. 1 вал дифференциальной связи МОД, размещенный в раздаточной коробке, выполнен разрезным, состоящим из двух секций, передняя из которых установлена на двух подшипниковых опорах и связана с гидромашиной МОД, а на внутренних хвостовиках секций установлена зубчатая соединительная муфта с подвижной кареткой для ручного разъединения указанных секций, соответствующее перемещение которой фиксируется датчиком отключения привода заднего моста.
3. Механическая трансмиссия по п. 1, отличающаяся тем, что в качестве указанного в п. 1 источника давления гидравлической системы использован гидроаккумулятор с клапаном автоматической зарядки, осуществляемой от гидронасоса постоянного рабочего объема, например, шестеренного типа, ограничивающий изменение рабочего давления в нагнетательной магистрали в пределах 15…20%, а сливная магистраль гидравлической системы снабжена подпорным клапаном, поддерживающим в ней избыточное давление 2…3 МПа, и посредством впускных обратных клапанов связана с обеими рабочими полостями гидромашин; при этом выходная полость каждой гидромашины через двухпозиционный четырехходовой золотник реверса вращения гидромашины соединена аналогичным золотником переключения режима работы либо с входом дроссельного регулятора потока в режиме насоса либо со сливной магистралью в режиме мотора или посредством двухпозиционного двухходового золотника разблокировки дифференциальных связей - с входной полостью гидромашины, постоянно связанной, кроме того, с выходом из дроссельного регулятора потока, вход в который в режиме мотора соединен с нагнетательной магистралью.
4. Механическая трансмиссия по пп. 1 и 2, отличающаяся тем, что в вычислительном блоке определяются радиусы траекторий движения центральных точек передней и задней осей колес по данным указанного в п. 1 датчика угловой скорости поворота АТС и расчетной величине окружной скорости движения полюса поворота, определяемой при фиксированных значениях коэффициента скоростных потерь δр, равного предельной величине этого коэффициента, соответствующей началу скольжения протектора шины в контакте с дорожным полотном, при ускоряющемся повороте управляемых колес, и нулю при их замедляющемся повороте, и на основании этих параметров определяются приближенные значения относительной величины εV0 разности длины траекторий движения центральных точек осей колес, относительного значения εV1 разности длины траекторий движения наружного и внутреннего передних колес и аналогичного параметра εV2 для задних колес, а также параметр εθ, равный произведению производной по времени от абсолютной величины текущего значения расчетного угла поворота управляемых колес и дискретного сигнала, равного единице при положительной величине этой производной и нулю при отрицательной величине, по данным указанных в п. 1 двухкомпонентных акселерометров рассчитываются текущие значения углов бокового увода передней и задней осей колес и их соотношение εψ, на основании которых в электронном блоке управления поперечной стабилизацией движения определяются разность среднего значения углов бокового увода и заданного граничного значения его, которая преобразуется в цифровой сигнал u5a и в результате логического сложения его с сигналом u5p от ручной кнопки включения режима поперечной стабилизации движения на панели управления суммарный цифровой сигнал u5 включением реле с постоянно разомкнутым контактом обеспечивает передачу текущего значения εψ в звенья сравнения с заданными нижним из условия исключения нейтральной поворачиваемости и верхним из условия снижения до минимума недостаточной поворачиваемости пороговыми значениями εψlimH и εψlimB соответственно, и в результате перемножения соответствующих значений разности ΔεψH и ΔεψB с дискретными сигналами SψH и SψB, равными единице, при ΔεψH<0 и Δεψв>0, соответственно, определяются аналоговые величины Δεψ1 и Δεψ2 нарушения нижнего и верхнего заданных пороговых значений, а также их суммы Δεψ0; электронный блок управления поперечной стабилизацией движения снабжен реле, управляемым от упомянутого в п. 2 датчика выключения привода заднего ведущего моста по сигналу u6, при равенстве нулю которого текущие значения указанных параметров εV0, Δεψ2, Δεψ1 через постоянно замкнутые контакты и Δεψ0 через переключаемый контакт реле, а εV1, εV2 и εθ - напрямую передаются в качестве входных сигналов управления в электронный блок управления частотой вращения гидромашин.
5. Механическая трансмиссия по пп. 1 и 4, отличающаяся тем, что указанный в п. 4 электронный блок управления частотой вращения гидромашин содержит три замкнутых следящего типа контура системы автоматического регулирования (САР) гидромашин МОД, переднего и заднего МКД, в которые в качестве сигналов отрицательных обратных связей из вычислительного блока передаются текущие относительные значения разности εω0 средней частоты вращения передних и задних колес, разности εω1 частоты вращения наружного и внутреннего передних колес и разности εω2 частоты вращения наружного и внутреннего задних колес соответственно, а из указанных в п. 4 входных сигналов управления в контурах САР формируются суммарные входные сигналы управления: при включенном приводе заднего ведущего моста: для МОД - εΣ0.=εV0+Kψ0.*Δεψ0, для переднего МКД - εΣ1.=εV1+Kθ1*εθ+Kψ1.*Δεψ1, для заднего МКД - εΣ2.=εV2+Kθ2*εθ+Kψ2.*Δεψ2 и при выключенном приводе заднего ведущего моста: для переднего МКД - εΣ1.=εV1+Kθ1*εθ и для заднего МКД - εΣ2.=εV2+Kθ2*εθ+Kψ2.*Δεψ0, которые изменяются в соответствии с изменением скорости и траектории движения АТС в исходном режиме работы контуров САР и в соответствии с компенсацией ошибок Δεψ1<0 и Δεψ2>0 регулирования в режиме поперечной стабилизации движения АТС, при этом разница суммарных входных сигналов и сигналов обратных связей в двух указанных режимах работы САР - сигналы ошибок εδ0, εδ1, εδ2 слежения после корректировки в изодромных звеньях поступают на входы соответствующих электронных блоков управления дроссельными регуляторами потока.
6. Механическая трансмиссия по пп. 1 и 3, отличающаяся тем, что управление указанными в п. 3 золотниками переключения режима работы гидромашин индивидуальное и автоматическое и обеспечивается цифровыми сигналами u20, u21, u22, которые формируются в электронном блоке управления соленоидами золотников гидравлической системы путем логического перемножения цифрового сигнала Sω, полученного в результате преобразования в релейном звене аналоговой величины производной по времени от абсолютной величины угловой скорости поворота АТС, равного единице при положительной величине производной, и цифровых сигналов Sp0, Sp1, Sp2, полученных в результате преобразования в релейных звеньях определяемых в вычислительном блоке по данным датчиков давления аналоговых величин перепада давления между выходной и входной полостями гидромашин и равных единице при снижении этих значений до заданного порогового значения δрн, соответствующего потерям давления на регулирующем клапане дроссельного регулятора потока при максимальной частоте холостого вращении гидромашины в режиме насоса при повороте АТС с минимальным радиусом, в случае перевода работы гидромашины из ведомого режима насоса в ведущий режим мотора и при равенстве этого перепада давления нулю при минимальной частоте холостого вращении гидромашины в режиме мотора в случае обратного перевода ее работы в ведомый режим насоса.
7. Механическая трансмиссия по пп. 1 и 3, отличающаяся тем, что автоматическое управление указанными в п. 3 золотниками реверса, соленоиды которых выключены при переднем ходе АТС, обеспечивается двумя реле с постоянно разомкнутыми контактами и соответствующими цифровым сигналом u00 датчика включения передачи заднего хода для гидромашины МОД и цифровым сигналом u01, полученным в электронном блоке управления соленоидами гидравлической системы в результате логического перемножения логической суммы сигнала указанного датчика и цифрового сигнала Sθ1 направления поворота АТС, равного нулю, например, при повороте вправо и единице при повороте влево, являющегося преобразованием дискретного сигнала Sθ из двухпозиционного релейного звена вычислительного блока, на инверсию логического произведения этих двух цифровых сигналов, первый из которых поступает в реле управления золотником реверса гидромашины МОД, а второй - в реле управления золотниками реверса гидромашин переднего и заднего МКД.
8. Механическая трансмиссия по пп. 1, 3 и 4 отличающаяся тем, что управление указанными в п. 3 золотниками разблокировки, при выключении соленоидов которых гидромашины разблокированы, обеспечивается двумя реле с постоянно замкнутыми контактами, на вход одного из которых подается цифровой сигнал u11, управляющий разблокировкой гидромашин МОД и переднего МКД и являющийся логической суммой сигнала от ручной кнопки включения разблокировки на панели управления и световой индикации и сигнала датчика торможения, а на вход второго, управляющего разблокировкой гидромашины заднего МКД, реле поступает цифровой сигнал u12, являющийся логической суммой сигнала u11 и цифрового сигнала u11 - логического произведения сигнала u3p от ручной кнопки выключения режима поперечной стабилизации движения при выключенном приводе заднего ведущего моста на панели управления и световой индикации и указанного в п. 4 цифрового сигнала u6 от датчика отключения привода заднего моста.
9. Механическая трансмиссия по п. 1, отличающаяся тем, что в электронном блоке управления стабилизацией поперечного движения определяются разности предельно допустимого и текущих значений углов бокового увода передней и задней осей, рассчитанных в вычислительном блоке, и эти два аналоговых параметра преобразуются релейными звеньями в цифровые сигналы, равные нулю при положительных значениях этих параметров, логическая сумма которых - цифровой сигнал u4 передается на панель управления и световой индикации, вызывая включение красного светового индикатора превышения допустимой для данных условий скорости движения.
10. Механическая трансмиссия по пп. 1 и 3, отличающаяся тем, что гидравлическая система снабжена реле давления, установленными в нагнетательной и сливной магистралях и фиксирующими снижение ниже заданного уровня давления зарядки аккумулятора в нагнетательной магистрали и давления подпора в сливной магистрали, логическая сумма цифровых сигналов которых - цифровой сигнал u7 передается на панель управления и световой индикации, вызывая включение красного светового индикатора неисправности гидравлической системы.
| УПРАВЛЯЕМЫЙ МЕЖКОЛЕСНЫЙ (МЕЖОСЕВОЙ) ДИФФЕРЕНЦИАЛ | 2007 |
|
RU2376515C2 |
| МЕХАНИЗМ КОТОВСКОВА БЛОКИРОВКИ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221949C1 |
| Раздаточная коробка транспортного средства | 1990 |
|
SU1754504A1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2141588C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БЛОКИРОВКОЙ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2169871C2 |

