1
Изобретение относится к автоматике и вычислительной технике и предназначено для использования в системах технического зрения.
Це-ль изобретения - расширение области применения способа за счет дополнительного определения угла ориентации объекта на плоскости.
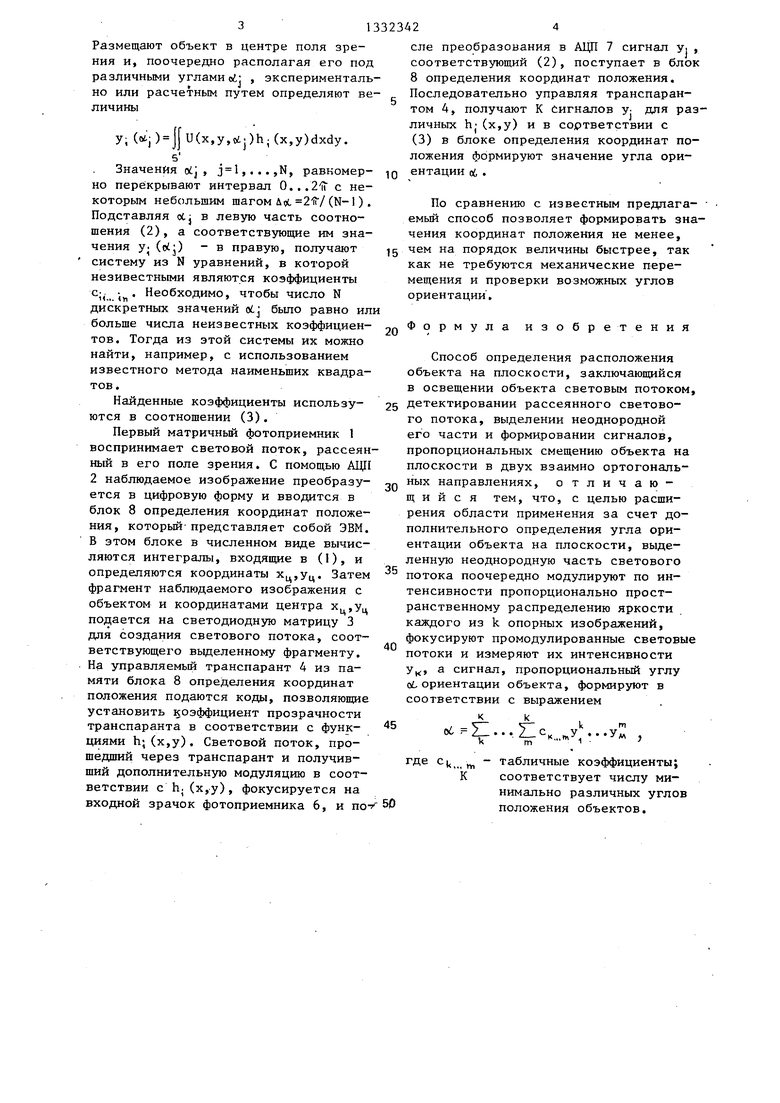
На фиг. 1 приведен пример изображения объекта в поле зрения датчика на фиг. 2 - схема устройства, реализующего предлагаемый способ.
Устройство содержит последовательно соединенные матричный фотоприемник 1 и первый аналого-цифровой преобразователь (АЦП) 2, последовательно соединенные светодиодную матрицу 3,-управляемый транспарант 4, фокусирующую линзу 5, фотоприемник 6 и второй АЦГ1 7, блок 8 определения координат положения, причем первый 2 и второй 7 АЦП, светодиодная матрица 3 и управляемый транспарант 4 связаны с блоком 8 определения координат с помощью линии 9 сопряжения в стандарте КАМАК.
Способ осуществляют следующим об- разом.
1
Поле зрения фотоприемника на некоторой плоскости равномерно освещается источником света. Рассеянный световой поток создает на входной апертуре фотоприемника изображение этого поля. Если объект отсутствует, то световой поток является однородным. Если объект находится в поле зрния, то за счет неравномерного рассеяния возникает модуляция интенсивост светового потока, воспроизводящая на входной апертуре фотоприемника изображение объекта, как показано на фиг. 1.
Координаты смещения центра тяжести изображения Хц и у определяются следующим образом:
(xU(x,y)dxdy/J U(x,y)dxdy, вS
(x,y)dxdy/|f U(x,y)dxdy,
бS
где S - поле зрения фотоприемника; и(х,у) - интенсивность светового потока, рассеянного точкой с координатами х, у.
После того, как координаты центра тяжести, характериззтощие смещение объекта, найдены, выделяется часть светового потока с координатами центра X.
Уц, которая содержит изображе
ние объекта, т.е. сужается поле зрения датчика до площадки S ( фиг. 1, показана пунктиром). Размеры S легко определяются заранее по размерам объекта. Предполагается, что известно, какой объект может оказаться в наблюдаемой области, как, например, в случае движения одинаковых деталей по ленте транспортера.
Далее определяется угол ой ориентации объекта. Для этого вьщеленную часть светового потока поочередно подвергают пространственной модуляции по интенсивности в соответствии с законом изменения системы выбранных двумерных ортогональных функций h- (,2,...,К). Число К определяет точность определения угла ориентации ot и может быть установлено экспериментально. Система ортогональных функций выбирается из соображений простоты осуществления модуляции. Модуляция может выполняться, например, путем пропускания выделенного светового потока через полупрозрачную маску, ко- эффициент прозрачности которой пропорционален значениям двумерной функции Уолша. Дпя каждой маски с законом модуляции h; (х,у) промодулированный световой, поток фокусируют, чтобы сформировать сигнап У; , пропорциональный интегральной яркости
(x,y)h;(x,y)dxdy,
,2,...,K
(2)
Если сигналы у- формируются поочередно, путем смены маски, то все у. необходимо запомнить до получения последнего у,. Можно все yj получить одновременно путем мультиплицирования выделенного светового потока и модуляции каждой из копий с помощью своей маски.
Далее формируется сигнал, пропорциональный углу об, в соответствии со следующим преобразованием: m m
S Например, доя и ношение имеет вид:
1
(3)
зто COOTIE ,оУ,+с„,,,+
У1 + ,2У У г+С Х г
Величина коэффициентов с; . находятся заранее следующим образом.
Размещают объект в центре поля зрения и, поочередно располагая его под различными углами.: , экспериментально или расчетным путем определяют величины
У, (otj) ||u(x,y,otj)hj (x,y)dxdy.
5
Значения oij , j l,...,N, равномерно перекрывают интервал О...2 н с некоторым небольшим шагом (N-1). Подставляя otj в левую часть соотношения (2), а соответствующие им значения у (oij) - в правую, получают систему из N уравнений, в которой незивестными являются коэффициенты
Н... r
Необходимо, чтобы число N
дискретных значений o6j было равно ил больше числа неизвестных коэффициентов. Тогда из этой системы их можно найти, например, с использованием известного метода наименьших квадратов.
Найденные коэффициенты используются в соотношении (3).
Первый матричньй фотоприемник 1 воспринимает световой поток, рассеянный в его поле зрения. С помощью АЦП 2 наблюдаемое изображение преобразуется в цифровую форму и вводится в блок 8 определения координат положения, который-представляет собой ЭВМ. Б этом блоке в численном виде вычисляются интегралы, входящие в (I), и определяются координаты Хц,Уц. Затем фрагмент наблюдаемого изображения с объектом и координатами центра х
ц,Уц
подается на светодиодную матрицу 3 для создания светового потока, соответствующего выделенному фрагменту. На управляемый транспарант 4 из памяти блока 8 определения координат положения подаются коды, позволяющие установить коэффициент прозрачности транспаранта в соответствии с функциями h;(x,y). Световой поток, прошедший через транспарант и получивший дополнительную модуляцию в соответствии с h,(х,у), фокусируется на входной зрачок фотоприемника 6, и по
еле преобразования в АЦП 7 сигнал у,, соответствующий (2), поступает в блок 8 определения координат положения. Последовательно управляя транспарантом 4, получают К сигналов у- для различных hj(х,у) и в соответствии с (3) в блоке определения координат положения формируют значение угла ориентации oL «
По сравнению с известным предлага- емый способ позволяет формировать значения координат положения не менее, чем на порядок величины быстрее, так как не требуются механические перемещения и проверки возможных углов ориентации.
20
Формула изобретения
Способ определения расположения объекта на плоскости, заключающийся в освещении объекта световым потоком, детектировании рассеянного светового потока, выделении неоднородной его части и формировании сигналов, пропорциональных смещению объекта на плоскости в двух взаимно ортогональных направлениях, отличающийся тем, что, с целью расширения области применения за счет дополнительного определения угла ориентации объекта на плоскости, выдеенную неоднородную часть светового потока поочередно модулируют по интенсивности пропорционально пространственному распределению яркости каждого из k опорных изображений, фокусируют промодулированные световые потоки и измеряют их интенсивности
к
а сигнал, пропорциональный углу
oL ориентации объекта, формируют в соответствии с выражением
0 - ZI.. г ZI V m
к„.тУ,
m УЛЛ
с
(.., т К
табличные коэффициенты; соответствует числу минимально различных углов положения объектов.
Редактор В.Петраш
Составитель А.Краснов Техред В.Кадар
Заказ 3835/46
Тираж 672Подписное
ВНШ1Ш Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.2
Корректор А.Обручар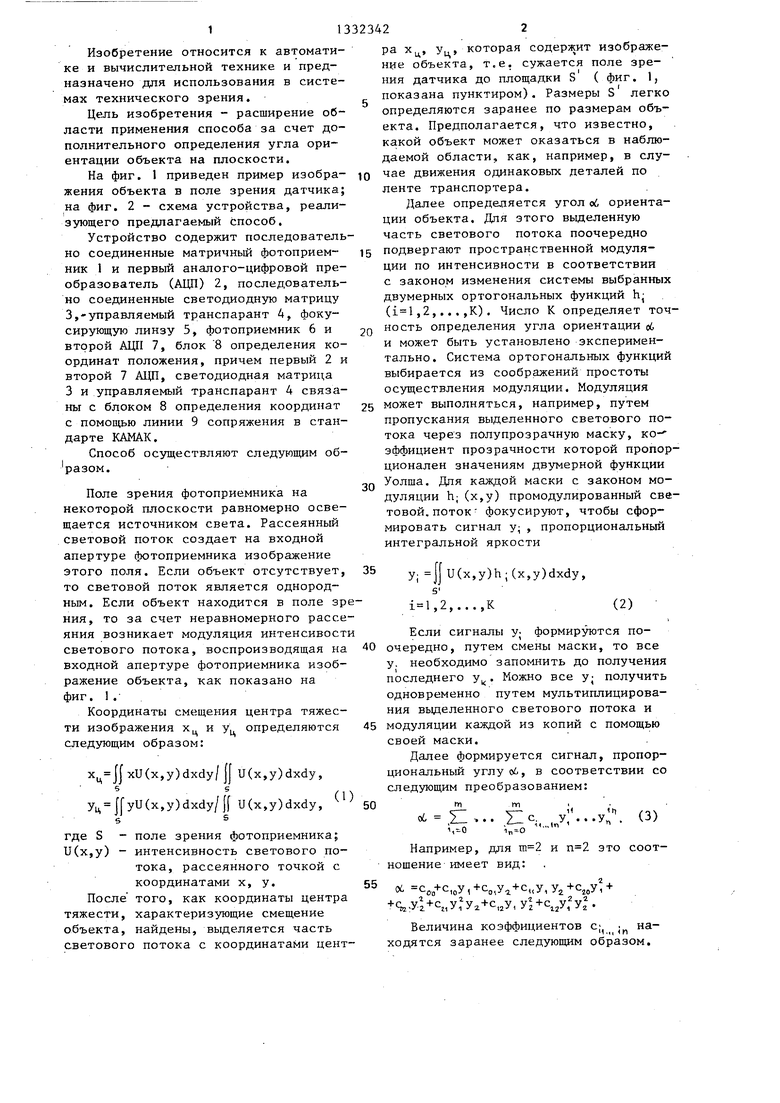
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления моментов изображений | 1990 |
|
SU1795484A1 |
| Способ измерения линейных перемещений и устройство для его осуществления | 1987 |
|
SU1522028A1 |
| Способ измерения линейных перемещений | 1989 |
|
SU1663426A2 |
| Некогерентный оптический коррелятор | 1984 |
|
SU1182550A1 |
| Способ и устройство для Фурье-анализа жидких светопропускающих сред | 2021 |
|
RU2770415C1 |
| Способ неразрушающего контроля | 1988 |
|
SU1608493A1 |
| Способ определения скоростей частиц | 1990 |
|
SU1770911A1 |
| Оптико-электронное устройство для определения координат энергетического центра двумерного излучателя | 1972 |
|
SU435716A1 |
| Способ определения структурной характеристики показателя преломления атмосферы | 1987 |
|
SU1497520A1 |
| Оптико-электронное корреляционное устройство | 1986 |
|
SU1410071A2 |

Изобретение относится к автоматике и вычислительной технике и предназначено для использования в системах технического зрения промышленных роботов. Целью изобретения является расширение области применения способа за счет дополнительного определения угла ориентации объекта на плоскости. Цель достигается путем освещения объекта световым потоком, детектирования рассеянного светового потока, поочередной модуляции выделенной неоднородной части светового потока пропорционально пространственному распределению яркости опорных изображений, 11змерения интенсивностей промодулированных световых потоков и определения по ним угла ориентации объекта. Совокупность указанных операций позволяет определять расположение объекта с высокой степенью точности. 2 ил. с СЛ
| Оптико-электронные методы обработки изображений.: Сб./Под ред | |||
| С.Б.Гуревича, Л.: Наука, 1982, , с | |||
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| Рельсовый тормоз | 1988 |
|
SU1549840A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
