Изобретение относится к оптико-электронным вычислительным средствам обработки изображений и может быть использовано в системах навигации летательных аппаратов, управления роботами, анализа аэрокосмических снимков,
Известны устройства вычисления моментов изображений. Одно из таких устройств содержит телекамеру, блок выделения окна стробирования, АЦП, блоки сумматоров, блок управления, Недостатком данного устройства является ограниченность функциональных возможностей, что обуславливается невозможностью вычисления центральных моментов изображений, а только геометрических. Другим недостатком устройства является низкая точность результатов, так как устройство предназначено для обработки изображений равномерностью не более чем 32 х 32 пиксела.
Наиболее близким техническим решением к предлагаемому устройству является устройство для вычисления моментов изображений, содержащее коллимированный источник когерентного излучения, выход которого оптически связан через оптический блок, транспарант с изображением, Фурье- линзу с входом матрицы фотоприемников. Недостатком данного устройства является ограниченность функциональных возможностей, связанная с невозможностью вычисления центральных моментов изображений.
Целью изобретения является расширение функциональных возможностей устройства путём определения координат центра масс объекта и центрирования изображения. Поставленная цель достигается за счет того, что в устройство вычисления моментов изображений, содержащее коллимированный источник когерентного излучения, оптический преобразователь, транспарант с изображением, Фурье-линзу, выход которой оптически связан с входом фотоприемной матрицы, выходы которой являются выходами устройства, введены блок вычисления координат центра изображения объекта, блок управления, блок центрирования изображения, два полупрозрачных зеркала, два оптических затвора и два светоделителя, вход первого из которых оптически связан с выходом коллимированного источника когерентного излучения, а первый выход оптически связан через первый затвор с входом оптического преобразователя, выход которого оптически связан с первым входом первого полупрозрачного зеркала, второй вход которого оптически связан с выходом второго полупрозрачного зеркала, а выход первого полупрозрачного зеркала оптически связан через транспарант с входом второго светоделителя, первый выход которого оптически связан с входом Фурье-линзы, второй выход - с оптическим входом блока
вычисления координат центра изображения объекта, а третий выход - с первым входом блока центрирования изображения, второй вход которого оптически связан со вторым выходом первого светоделителя, третий вы0 ход которого через, второй затвор связан с первым входом второго полупрозрачного зеркала, второй вход которого связан с оптическим выходом блока центрирования изображения, сигнальные входы которого
5 соединены с сигнальными выходами блока вычисления координат центра изображения, управляющий выход которого подключен к первому входу блока управления, второй управляющий вход и первый выход.
0 которого соединены, соответственно, с управляющими выходом и входом блока центрирования изображения, а второй и третий управляющие выходы блока управления подключены к электрическим входам перво5 го и второго оптических затворов.
На фиг. 1 представлена структура предложенного устройства; на фиг. 2 - блока вычисления координат центра изображения объекта; на фиг, 3 - блока управления; на
0 фиг. 4 - блока центрирования изображения; на фиг. 5 - узла синхронизации блока центрирования.
Устройство для вычисления моментов изображений содержит (фиг. 1) коллимиро5 ванный источник когерентного излучения (КИГИ) 1, оптический преобразователь 2, транспарант с изображениями 3, Фурье- линзу 4, выход которой оптически связан с входом фотоприемной матрицы 5, блок вы0 числения координат центра изображения объекта 6, блок управления 7, блок центрирования изображения 8, два полупрозрачных зеркала 9,10, два оптических затвора 11,12 и два светоделителя 13,14, причем
5 вход первого светоделителя 13 оптически связан с выходом коллимированного источника когерентного излучения 1, а первый выход оптически связан через первый затвор 11 с входом оптического преобразова0 теля 2, выход которого оптически связан с первым входом первого полупрозрачного зеркала 9, второй вход которого оптически связан с выходом второго полупрозрачного зеркала 10, а выход первого полупрозрачно5 го зеркала 9 оптически связан через транспарант Зс входом второго светоделителя 14. первый выход которого оптически связан с входом Фурье-линзы 4, второй выход - с оптическим входом блока вычисления координат центра изображения объекта 6, а третий выход - с первым входом блока центрирования изображения 8, второй вход которого оптического связан со вторым выходом первого светоделителя 13, третий выход которого через второй затвор 12 связан с первым входом второго полупрозрачного зеркала 10, второй вход которого связан с оптическим выходом блока центрирования изображения 8, сигнальные входы которого соединены с сигнальными выходами блока вычисления координат центра изображения 6, управляющий выход которого подключен к первому входу блока управления 7, второй управляющий вход и первый выход которого соединены, соответственно, с управляющими выходом и входом блока центрирования изображения 8, а второй и третий управляющие выходы блока управления 7 подключены к электрическим входам первого 11 и второго 12 оптических затворов.
Кроме того, оптический преобразователь 2 выполнен в виде двух масок 15,16, Фурье-линзы 17, фильтра 18, отображающей линзы 19, причем оптический вход первой маски 15 является оптическим входом блока, а выход оптически связан через Фурье-линзу 17, фильтр 18, отображающую линзу 19 и вторую маску 16 с выходом блока.
Блок вычисления координат 6 выполнен в виде трех элементов ИЛИ 20,21,22, двух АЦП 23,24 и координатно-чувствительного фотоприемника 25, вход которого является оптическим входом блока, а первый и второй выходы соединены с соответствующими входами первого АЦП 23, выходы которого соединены с первой группой выходов блока и с входами первого элемента ИЛИ 20, а третий и четвертый выходы координатно-чувствительного фотоприемника 25 соединены с соответствующими входами второго АЦП 24, выходы которого соединены с второй группой выходов блока и с входами второго элемента ИЛИ 21, выходы первого 20 и второго 21 элементов ИЛИ. соединены с соответствующими входами третьего элемента ИЛИ 22, выход которого является одиночным выходом блока. Кроме того, координатно-чувствительный фото- приемник 25 выполнен в виде полупроводниковой пластины 26 с точечным, центральным 27 и кольцевым наружным 28 электродами, между которыми включен источник постоянного напряжения 29, и двух пар четвертькруговых контактов 30 и 31, 32 и 33, расположенных симметрично по отношению к центру полупроводниковой пластины 26 на расстоянии, не превышающем длину дрейфа неосновных носителей тока; выходы первой пары противолежащих контактов 30 и 31 являются первым и вторым выходами координатно-чувствительного фотоприемника 25, а выходы второй пары противолежащих контактов 32 и 33 являют- 5 ся третьим и четвертым выходами координатно-чувствительного фотоприемника 25. Блок управления 7 выполнен в виде двух триггеров 34,35, двух элементов ИЛИ 36,37, двух элементов задержки 38,39, эле0 мента НЕ 40 и элементов И 41,42. причем
прямой вход первого триггера 34 соединен
с входом запуска блока, а прямой выход - с
третьим выходом блока и через первый эле мент задержки 38- с прямым входом второ5 го триггера 35, прямой выход которого соединен с первыми входами элементов И 41,42, а второй вход первого элемента И 41 соединен с выходом элемента НЕ 40, вход которого соединен с вторым входом второ0 го элемента И 42 и с первым входом блока. а выход второго элемента И 42 соединен с вторым выходом блока, второй вход которого соединен с первыми входами элементов ИЛИ 36,37, вторые входы которых соедине5 ны с выходом первого элемента И 41, выход же первого элемента ИЛИ 36 соединен с входом сброса первого триггера 34, а выход второго элемента ИЛИ 37 через второй элемент задержки 39 соединен с третьим выхо0 дом блока.
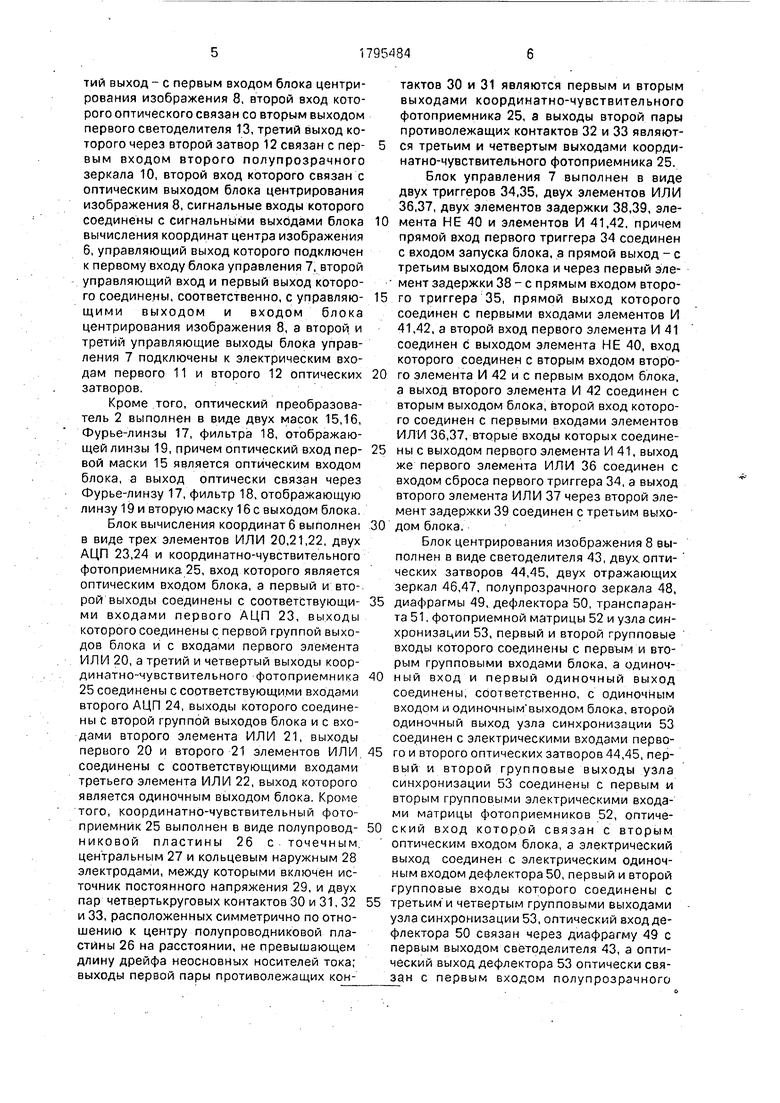
Блок центрирования изображения 8 выполнен в виде светоделителя 43, двухопти- ческих затворов 44,45, двух отражающих зеркал 46,47, полупрозрачного зеркала 48,
5 диафрагмы 49, дефлектора 50, транспаранта 51, фотоприемной матрицы 52 и узла синхронизации 53, первый и второй групповые входы которого соединены с первым и вторым групповыми входами блока, а одиноч0 ный вход и первый одиночный выход соединены, соответственно, с одиночным входом и одиночным выходом блока, второй одиночный выход узла синхронизации 53 соединен с электрическими входами перво5 го и второго оптических затворов 44,45, первый и второй групповые выходы узла синхронизации 53 соединены с первым и вторым групповыми электрическими входами матрицы фотоприемников 52, оптиче0 ский вход которой связан с вторым оптическим входом блока, а электрический выход соединен с электрическим одиночным входом дефлектора 50, первый и второй групповые входы которого соединены с
5 третьим и четвертым групповыми выходами узла синхронизации 53, оптический вход дефлектора 50 связан через диафрагму 49 с первым выходом светоделителя 43, а оптический выход дефлектора 53 оптически связан с первым входом полупрозрачного
зеркала 48, второй вход которого оптически связан через первое отражающее зеркало 46 и первый оптический затвор 44 с вторым выходом светоделителя 43, вход которого является первым оптическим входом блока, а выход полупрозрачного зеркала 48 оптически связан через транспарант 51, второе отражающее зеркало 47 и второй оптический затвор 45 с оптическим выходом блока.
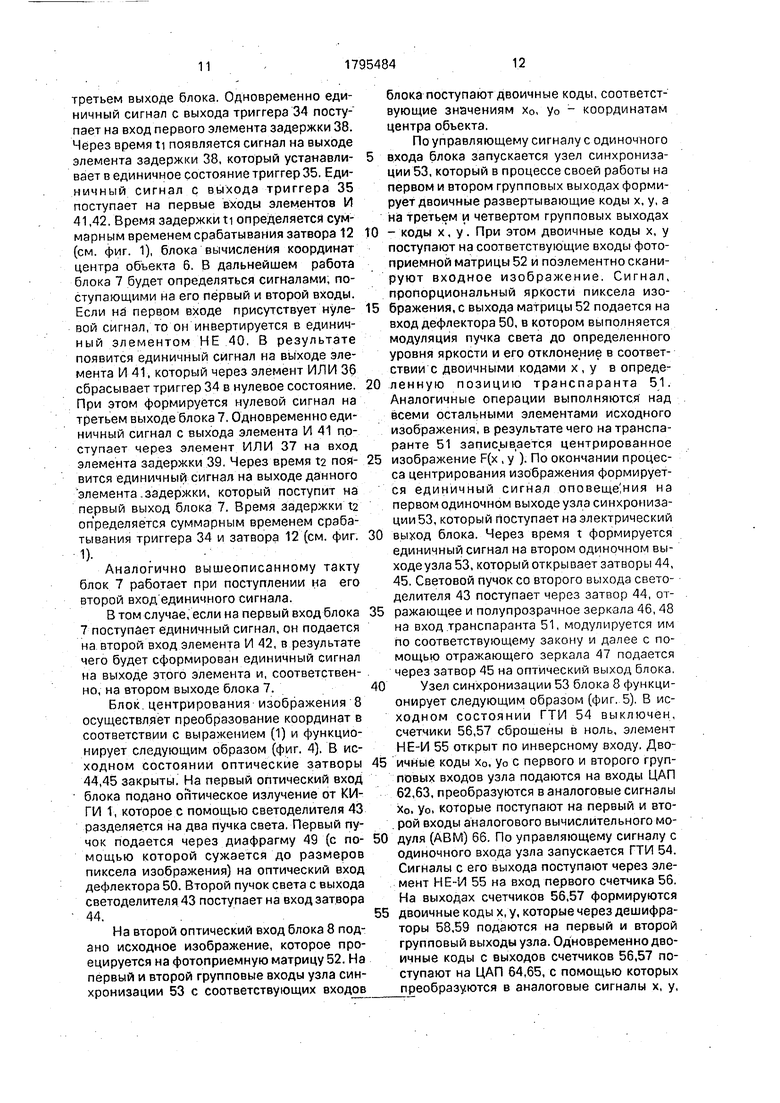
Кроме того, узел синхронизации 53 блока 8 выполнен в виде генератора тактовых импульсов 54, элемента НЕ-И 55, двух счетчиков 56, 57, двух дешифраторов 58,59, двух элементов задержки 60,61, четырех ЦАП 62,63,64,65, аналогового вычислительного модуля 66 и двух АЦП 67,68, выходы которых являются, соответственно, третьим и четвертым групповыми выходами узла, а входы соединены с первым и вторым выходами вычислительного модуля 66, первый и второй входы которого соединены с выходами первого и второго ЦАП 62,63, входы которых являются, соответственно, первым и вторым групповыми входами узла, а третий и четвертый входы аналогового вычислительного модуля 66 соединены, соответственно, с выходами третьего и четвертого ЦАП 64,65, групповые входы которых соединены, соответственно, с групповыми выходами первого и второго счетчиков 56,57 и группо- . выми входами первого и второго дешифраторов 58,59, выходы которых являются первым и вторым групповыми выходами узла, а одиночный выход первого счетчика 56 соединен с входом второго счетчика 57, одиночный выход которого соединен с входом НЕ элемента НЕ-И 55 и через первый элемент задержки 60 - с первым одиночным выходом узла, а через второй элемент задержки 61 - с вторым одиночным выходом узла, вход же первого счетчика 56 соединен с выходом элемента НЕ-И 55, прямой вход которого соединен с выходом генератора тактовых импульсов 54, вход запуска которого соединен с одиночным входом узла.
Устройство работает следующим образом (фиг. 1). В исходном положении колли- мирован.ный источник когерентного излучения (КИГИ) 1 включен, оптические затворы 11, 12 закрыты, Излучение от КИГИ 1 поступает через светоделитель 13 на входы затворов 11,12 и на первый оптический вход блока центрирования изображения 8. На транспаранте 3 записано исходное изображение объекта, который может иметь произвольное местоположение на плоскости, угловую ориентацию, масштаб, ракурс.
На первом этапе работы устройства определяется местоположение объекта на плоскости (координаты центра масс объекта). При этом формируется сигнал на третьем выходе блока управления 7, под воздействием которого открывается -оптический затвор 12. Световое излучение от КИГИ 1
поступает через затвор 12, полупрозрачные зеркала 9,10 на транспарант с исходным изображением 3, модулируется им по соответствующему закону и далее через светоделитель 14 подается на вход блока
вычисления координат центра, изображения объекта 6, В том случае, если объект в исходном изображении не является центрированным, т.е. центр масс объекта не совпадает с геометрическим центром транспаранта 3,
на одиночном выходе блока вычисления координат центра 6 формируется единичный сигнал, который поступает на первый вход блока управления 7. На групповых выходах блока б формируются координаты центра
объекта х0, Уо, которые поступают на групповые входы блока центрирования изображения 8.
На втором этапе работы устройства входное изображение центрируется в соответствии с параметрами х0, . При этом на втором выходе блока управления 7 формируется управляющий сигнал, который поступает на одиночный вход блока 8 и запускает его. С третьего выхода светоделителя 14 на
. оптический вход блока 8 поступает исходное изображение F(x,y), которое в процессе функционирования данного блока центрируется. Операция центрирования выполняется пу.тем преобразования координат
изображения F (х,у):
F(x,y)(xy), гдех х-х0, у у-у0 (1)
По окончании процесса центрирования
изображения в блоке 8 формируется сигнал
на его одиночном выходе, который поступает на второй одиночный вход блока управления 7. По этому сигналу закрывается затвор 12. Затем центрированное изображение с оптического выхода блока 8 поступает через полупрозрачные зеркала 10,9 на транспарант 3 и записывается на нем.
В том случае, если объект в изображении центрирован, на одиночном выходе блока вычисления координат 6 формируется нулевой
сигнал, который поступает на первый вход блока управления 7. Данный сигнал является признаком отсутствия необходимости центрирования изображения.
На следующем, третьем, этапе оптически вычисляются моментные признаки изображений. Блок управления 7 формирует единичный сигнал на третьем выходе, под воздействием которого открывается затвор 1.1. При этом одновременно закрывается затвор 12. Коллимированный световой пучок
от КИГИ 1 поступает через светоделитель 13, затвор 11 на вход оптического преобразователя 2. В преобразователе 2 световой пучок проходит через первую маску 15, которая описывается функцией вида:
Mi cos(x sinftbx+ wix)cos(ysinutey + селу),
где ufe, - пространственные частоты.
Промодулированный маской 15 световой пучок поступает далее через Фурье- линзу 17, в задней фокальной плоскости которой формируется двумерное оптическое преобразование Фурье от функции Mi:R H(Mi), где Н - операция преобразования Фурье. С помощью фильтра 18 из функции R устраняются составляющие, определяемые компонентами ш. В результате на выходе фильтра 18 оптическое распределение будет описываться функцией Rf.
Ri exp(jxsinftkx)exp(jysinu oy),
которое с помощью отображающей линзы 19 пропускается через вторую маску 16. Маска 16 описывается выражением вида:
М2 exp(xcosftfex)exp(ycosft oy).
В результате на выходе маски 16 формируется произведение функций RI и М2.
G RiMa exp(xexp(jftfex)) x х exp(yexp(Jftfcy)).
Световой пучок с функцией G с выхода преобразователя 2 поступает через полупрозрачное зеркало 10 на транспарант 3, изображение на котором описывается функцией F. В результате на выходе транспаранта формируется произведение функций G и F: U GF. Промодулированный функцией U световой пучок с выхода транспаранта 3 поступает через светоделитель 14 на линзу Фурье-преобразования 4. В задней фокальной плоскости линзы 4 формируется двумерное оптическое преобразование Фурье от функции U (2):
оо оо
со
U(ufc,av) ЈУ Я (xWi k )exp(j(iftfex +
+ к(Уьу)) ехр( + uy/))dxdy
mpq/p q
где nripq - значения центральных моментов изображения F различных порядков.
Для нецентрированного входного изображения значения трч будут представлять собой геометрические моменты.
С помощью фотоприемной матрицы 5, 5 расположенной в задней фокальной плоскости линзы 4, выполняется преобразование оптической информации в электрические сигналы и выдача их на выход устройства. Блок вычисления координат центра изо0 бражения объекта 6 функционирует следующим образом (фиг. 2). Изображение со входа блока проецируется на вход координатно- чувствительного фотоприемника 25, в котором между центральным точечным 27 и
5 кольцевым наружным 28 электродами полупроводниковой пластины. 26 с помощью источника постоянного напряжения 29 создано тянущее радиальное электрическое поле. При этом в освещенных участках пла0 стины 26 будут возникать неравновесные носители тока, которые под действием радиального электрического поля начнут двигаться по радиусам по направлению к кольцевому электроду 28 и будут достигать
5 определенных участков контактов 30-33. Если объект в изображении находится в центре (т.е. энергетический центр изображения объекта совпадает с геометрическим центром фотоприемника 25), на выходах контак0 тов 30-33 разности потенциалов не будет. Следовательно, н а выходах фотоприемника 25 электрического напряжения не появится, При сдвиге изображения объекта в каком-либо направлении, на выходах контак5 тов 30,31 и 32,33 появятся разности потенциалов, пропорциональные сдвигам энергетического центра изображения объекта по двум взаимно перпендикулярным направлениях X и Y. Полученные электриче0 ские напряжения с выходов фотоприемника 52 подаются на соответствующие входы АЦП 23 и 24, преобразуются в двоичные коды, соответствующие сдвигам изображения объекта по осям X,Y во входной плоско5 сти. Двоичные коды с выходов АЦП 23,24 поступают на первый и второй групповые выходы блока, а также на элементы ИЛИ 20,21. Если двоичные коды на выходах АЦП 23,24 не равны нулю, появится сигнал на
0 выходе элемента ИЛИ 22. Данный сигнал является признаком того, что центр изображения объекта не совпадает с геометрическим центром пластины 26. Сигнал с выхода элемента ИЛИ 22 подается на одиночный
5 выход блока 6.
Блок управления 7 функционирует следующим образом (фиг. 3). В первом такте работы по сигналу запуска триггер 34 устанавливается в единичное состояние. При этом формируется единичный сигнал на
третьем выходе блока. Одновременно единичный сигнал с выхода триггера 34 поступает на вход первого элемента задержки 38. Через время ti появляется сигнал на выходе элемента задержки 38, который устанавли- вает в единичное состояние триггер 35. Еди- ничный сигнал с выхода триггера 35 поступает на первые входы элементов И 41,42. Время задержки ti определяется суммарным временем срабатывания затвора 12 (см. фиг. 1), блока вычисления координат центра объекта 6. В дальнейшем работа блока 7 будет определяться сигналами; поступающими на его первый и второй входы. Если ни первом входе присутствует нуле- вой сигнал, то он инвертируется в единичный элементом НЕ 40. В результате появится единичный сигнал на выходе элемента И 41, который через элемент ИЛИ 36 сбрасывает триггер 34 в нулевое состояние. При этом формируется нулевой сигнал на третьем выходе блока 7. Одновременно единичный сигнал с выхода элемента И 41 поступает через элемент ИЛИ 37 на вход элемента задержки 39. Через время t2 поя- вится единичный сигнал на выходе данного элемента.задержки, который поступит на первый выход блока 7, Время задержки t2 определяется суммарным временем срабатывания триггера 34 и затвора 12 (см. фиг.
D.
Аналогично вышеописанному такту блок 7 работает при поступлении на его второй вход единичного сигнала.
В том случае, если на первый вход блока 7 поступает единичный сигнал, он подается на второй вход элемента И 42, в результате чего будет сформирован единичный сигнал на выходе этого элемента и, соответствен- но, на втором выходе блока 7.
Блок.центрирования изображения 8 осуществляет преобразование координат в соответствии с выражением (1) и функционирует следующим образом (фиг. 4). В исходном состояний оптические затворы 44,45 закрыты. На первый оптический вход блока подано оптическое излучение от КИ- ГИ 1, которое с помощью светоделителя 43 разделяется на два пучка света. Первый пучок подается через диафрагму 49 (с по- мощью которой сужается до размеров пиксела изображения) на оптический вход дефлектора 50. Второй пучок света с выхода светоделителя 43 поступает на вход затвора 44..
На второй оптический вход блока 8 подано исходное изображение, которое проецируется на фотоприемную матрицу 52. На первый и второй групповые входы узла синхронизации 53 с соответствующих входов
блока поступают двоичные коды, соответствующие значениям х0, Уо - координатам центра объекта.
По управляющему сигналу с одиночного входа блока запускается узел синхронизации 53, который в процессе своей работы на первом и втором групповых выходах формирует двоичные развертывающие коды х, у, а на третьем и четвертом групповых выходах -коды х, у. При этом двоичные коды х, у поступают на соответствующие входы фотоприемной матрицы 52 и поэлементно сканируют входное изображение. Сигнал, пропорциональный яркости пиксела изображения, с выхода матрицы 52 подается на вход дефлектора 50, в котором выполняется модуляция пучка света до определенного уровня яркости и его отклонение в соответствии с двоичными кодами х , у в определенную позицию транспаранта 51. Аналогичные операции выполняются над всеми остальными элементами исходного изображения, в результате чего на транспаранте 51 записывается центрированное изображение F(x , у ). По окончании процесса центрирования изображения формируется единичный сигнал оповещения на первом одиночном выходе узла синхронизации 53,который поступает на электрический выход блока. Через время t формируется единичный сигнал на втором одиночном вы- ходеузлабЗ, который открывает затворы 44, 45. Световой пучок со второго выхода светоделителя 43 поступает через затвор 44, отражающее и полупрозрачное зеркала 46, 48 на вход транспаранта 51, модулируется им по соответствующему закону и далее с помощью отражающего зеркала 47 подается через затвор 45 на оптический выход блока.
Узел синхронизации 53 блока 8 функционирует следующим образом (фиг. 5). В исходном состоянии ГТИ 54 выключен, счетчики 56,57 сброшены в ноль, элемент НЕ-И 55 открыт по инверсному входу, Двоичные коды Хо, УО с первого и второго групповых входов узла подаются на входы ЦАП 62,63, преобразуются в аналоговые сигналы Хо, УО, которые поступают на первый и вто- . рой входы аналогового вычислительного модуля (АВМ) 66. По управляющему сигналу с одиночного входа узла запускается ГТИ 54. Сигналы с его выхода поступают через элемент НЕ-И 55 на вход первого счетчика 56. На выходах счетчиков 56,57 формируются двоичные коды х, у, которые через дешифраторы 58,59 подаются на первый и второй групповый выходы узла. Одновременно двоичные коды с выходов счетчиков 56,57 поступают на ЦАП 64,65, с помощью которых преобразуются в аналоговые сигналы х, у,
которые, поступают на третий и четвертый входы АВМ 66. АВМ 66 выполняет непосредственный пересчет координат:
х х - х0, у у -уо
В дальнейшем сигналы х ,у с помощью АЦП 67,68 преобразуются в двоичные цифровые коды х , у , которые поступают на третий и четвертый групповые выходы узла.
При заполнении счетчика 56 формируется сигнал на его одиночном выходе, который поступает на вход счетчика 57 и устанавливает его в новое состояние (увеличение содержимого на 1). При заполнении счетчика 57 также формируется сигнал на его одиночном выходе, который закрывает по инверсному входу элемент НЕ-И 55, прекращая дальнейшую подачу сигналов от ГТИ 54 на вход счетчика 56.
По окончании процесса центрирования изображения в блоке 8, т.е. после появления единичного сигнала на одиночном выходе второго счетчика 57, данный сигнал поступает на вход первого элемента задержки 60. Через время t сигнал с выхода элемента
задержки 60 поступает на первый одиночный выход узла и на вход второго элемента задержки 61. на выходе которого сигнал появляется через время t . Сигнал с выхода
элемента задержки 61 подается на второй одиночный выход узла.
Время t определяется суммарным временем срабатывания ЦАП 64 (65), АВМ 66, АЦП 67 (68). дефлектора 50. Время t определяется суммарным временем записи оптической информации на транспаранте 51 блока 8 и временем срабатывания элемента ИЛИ 37, элемента задержки 39 блока 7, В качестве вычислительного модуля 66
узла может быть использована аналоговая вычислительная машина АВК-31.
Таким образом, предложенное устройство позволяет вычислять как геометрические, так и центральные момёнтные
признаки изображений.
При этом возможность вычисления центральных моментов обуславливается за счет вычисления центра масс объекта с помощью блока 6 устройства и центрирования входного изображения с помощью блока 8 предложенного устройства.


| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-электронное устройство для обработки оптической информации | 1981 |
|
SU972531A1 |
| Оптико-электронное корреляционное устройство | 1984 |
|
SU1244681A1 |
| Оптико-электронное корреляционное устройство | 1986 |
|
SU1410071A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ И НАПРЯЖЕНИЯ ЭЛЕМЕНТОВ КОНСТРУКЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2065571C1 |
| Устройство для преобразования координат изображения | 1987 |
|
SU1550504A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ И НАПРЯЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2085844C1 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ПРИЕМНАЯ СИСТЕМА | 2022 |
|
RU2799499C1 |
| Устройство для ввода информации | 1989 |
|
SU1714643A1 |
| СПОСОБ АНАЛИЗА ВОЛНОВЫХ ФРОНТОВ СВЕТОВОГО ПОЛЯ | 1992 |
|
RU2051397C1 |
| Оптическое вычислительное устройство | 1983 |
|
SU1144127A1 |

Изобретение относится к оптико-электронным вычислительным средствам обработки изображений и может быть использовано в системах навигации летательных аппаратов, управления роботами, анализа аэрокосмических снимков. Целью изобретения является расширение функциональных возможностей устройства за счет определения координат центра масс объекта и центрирования изображения. Устройство для вычисления моментов изображений содержит коллимировэнный источник когерентного излучения 1, оптический преобразователь 2, транспарант с изображением 3, Фурье-линзу 4, фотоприемную матрицу 5, блок вычисления координат центра изображения объекта 6, блок управления 7, блок центрирования изображения 8, два полупрозрачных зеркала 9,10, два оптических затвора 11, 12 и два светоделителя 13,14. Устройство позволяет вычислять как геометрические, так и центральные моментные признаки изображений. Возможность вычисления центральных моментов обуславливается за счет вычисления центра масс объекта с помощью блока б устройства и центрирования входного изображения с помощью блока 8 предложенного устройства. 5 ил. . СО с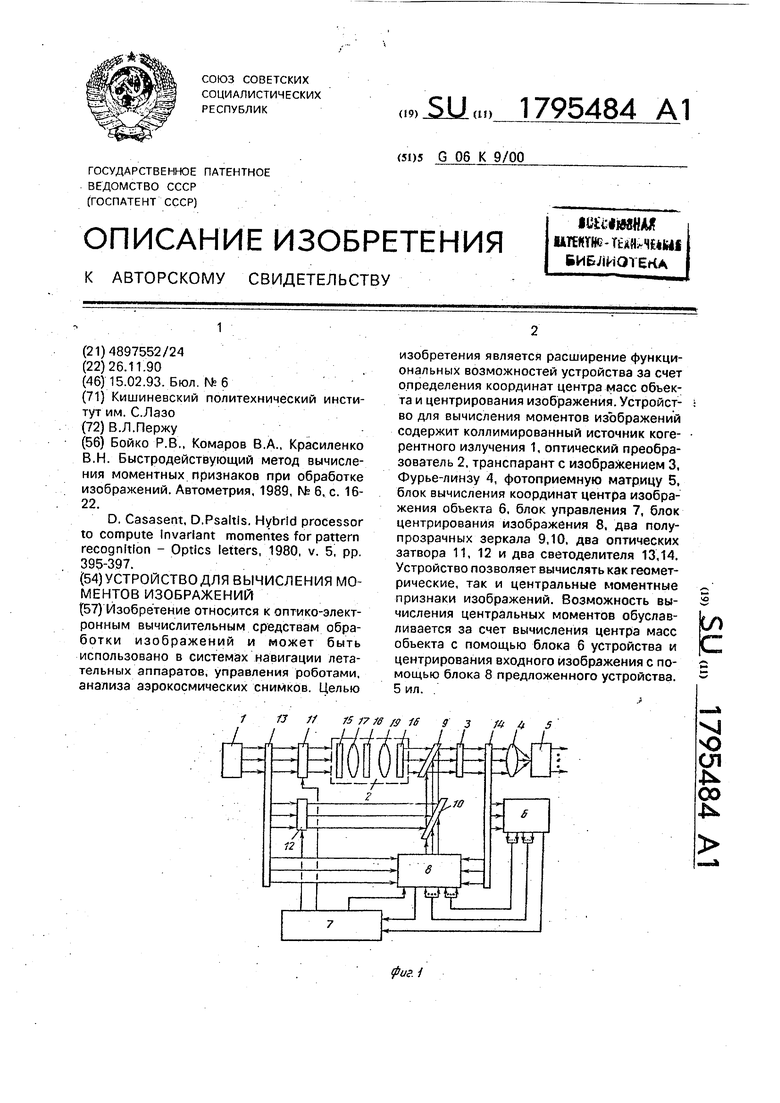
Ф о р м у л а и з о б р е т е н и я Устройство для вычисления моментов изображений, содержащее коллимирован- ный источник когерентного излучения, оптический преобразователь, транспарант с изображением, Фурье-линзу, выход которой оптически связан с выходом фотоприемной матрицы, выходы которой являются выходами устройства, отличающееся тем, что, с целью расширения функциональных возможностей за счет определения координат центра масс объекта и центрирования изображения, в него введены блок вычисления координат центра изображения объекта, блок управления, блок центрирования изображения, два полупрозрачных зеркала, два оптических затвора и два светоделителя, вход первого из которых связан с выходом коллимированно- го источника когерентного излучения, первый выход оптически связан через первый оптический затвор с входом оптического преобразователя, выход которого оптически связан с первым входом первого полупрозрачного зеркала, второй вход которого оптически связан с выходом второго полупрозрачного зеркала, а выход первого полупрозрачного зеркала оптически связан че- .рез транспарант с входом второго светоделителя, первый выход которого оптически связан с входом Фурье-линзы, второй выход - с оптическим входом блока вычисления координат центра изображения объекта, а третий выход - с первым входом блока цектрирования изображения, второй вход которого оптически связан с вторым выходом первого светоделителя, третий выход которого через второй оптический затвор связан с первым входом второго полупрозрачного
зеркала, второй вход которого связан с оптическим выходом блока центрирования изображения, сигнальные входы которого соединены с сигнальными выходами блока вычисления координат центра изображения, управляющий выход которого подключен к первому входу блока управления, второй управляющий вход и первый выход которого соединены соответственно с управляющими выходом и входом блока центрирования изображения, а второй и третий управляющие выходы блока управления подключены к электрическим входам первого и второго оптических затворов.
Г
А
Запусм
М
Y
36
i I,
ЈВ &
37 19
rh
п
ФигЗ
| Бойко Р.В., Комаров В.А., Красиленко В.Н | |||
| Быстродействующий метод вычисления моментных признаков при обработке изображений | |||
| Автометрия, 1989, 6, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| D | |||
| Casasent, D.Psaltls | |||
| Hybrid processor to compute Invariant momentes for pattern recognition - Optics letters, 1980, v | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| 395-397 | |||
