Изобретение относится к технике добычи нефти, в частности к способам регулирования длины хода полированного штока канатной подвески станков- качалок сквшяинньк штанговых насосных установок., и мОжет быть использовано в нефтедобывающей п ромьшхленно- сти при использовании станков-качалок типа СК и СКН.
Цель изобретения повьш1ение эф- . фективности путем исключения тяжелой, трудоемкой и небезопасной операции по изменению положения балансира в сборе ,с шатунами и пальцами.
Способ регулирования длины хода полированного штока канатной подвески станка-качалки скважинной штанг эвой насосной установки включает оста- 20 -положение определяют из соотношения
г „ . 2 2
- 2д +
R Н Н. а sin(arccos -- а--- -:,:2,:::Г..ж
-г 2
- ж
arcs Iпв
,« 90 ) - h
з;
а и б гид
в
ж
R где Н, - расстояние по вертикали от верхней поверхности рамы станка-качалки до оси его балансира, см; плечи балансира, см; расстояния от центра кривошипа до отверстий, в кото™ рые необходимо осуществить перестановку пальцев шатуна, см;
расстояние по горизонтали между осями вращения балансира и кривошипа, GM; расстояние по вертикали ежт ду осями вращения балансира и кривошипа, см; длина шатуна, см; hg - расстояние по вертикали между осью вращения балансира при его наклоне до нижней точки его головки. Н-а фиг. 1 -схематично представлен станок-качалка, общий вид; на фиг,2 - схема для расчета расстояния по вертикали от верхней поверхности рамы станка-качалки до нижнего конца головки балансира; на фиг.З - удлиненные винты динамометрирования канатной подвески станка-качалки.
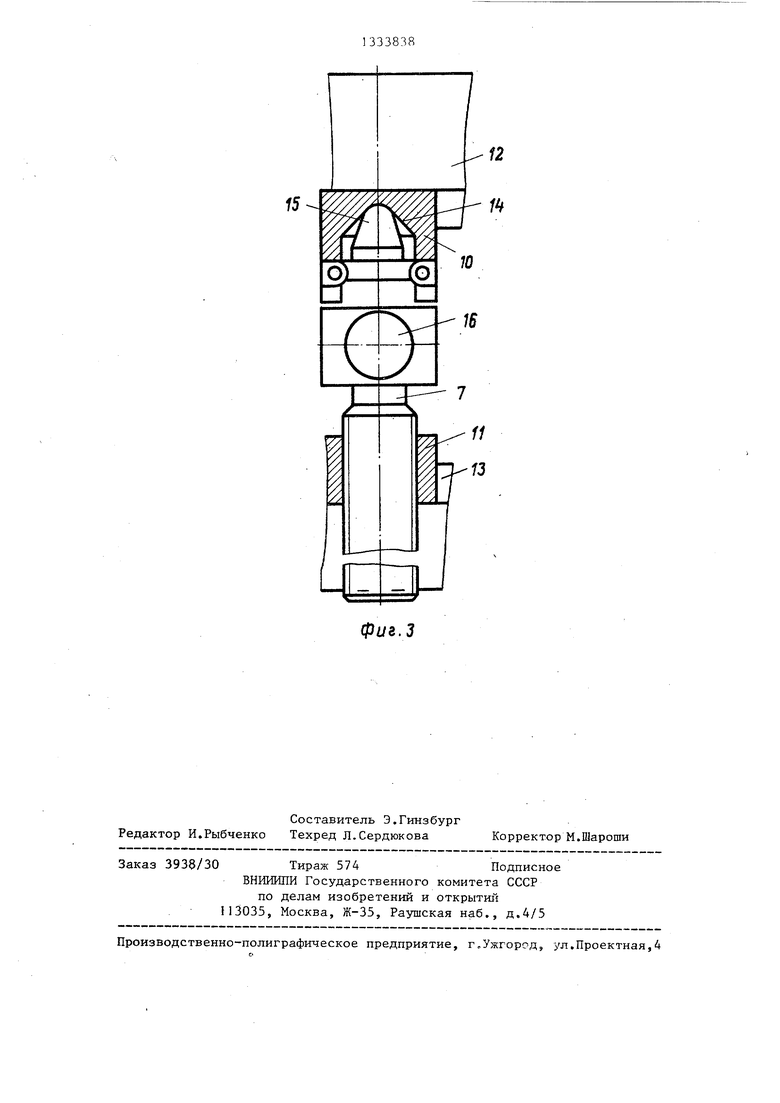
Станок-качалка содержит балансир I с головкой 2, связанный с кривошипами 3 через шатуны 4 с пальцами 5, и канатную подвеску б полированного штока с винтами 7 динамометрирования. Балансир 1 установлен на основани 8 с рамой 9, Удлиненные винты 7 динамо26-1в + ж в +жметрирования (фиг.З) устанавливаются
25 в канатной подвеске 6 посредством цланок 10 и 11, вставленных соответственно в прорези верхней 12 и нижней 13 траверс. Планки 10 имеют глухое сферическое отверсГие 14, о дно кото30 рого трется закругленная головка 15 винта 7. Винт 7 ввинчен в планку 11 и имеет радиальное отверстие 16 для осуществления его вращения. Винты 7 динамометрирования имеют один левую,
35 а другой правую резьбы. Зажим 17, устанавливаемый на полированный шток канатной подвески 6, посажен на устьевой сальник 18 штангового насоса (не показан),
40
Правая часть балансира 1 с проти- вогрузами (не обозначены), траверсой (не обозначена) и шатунами 4, отсоединенными от кривошипов 3, все45 гда тяжелее девой части балансира с его 1 оловкой 2, траверс 12 и 13 и каната канатной подвески 6. В связи с этим вращающий момент балансира 1 направлен по -часовой стрелке, и его
50 компенсирует колонна штанг насоса
(не показаны}, посаженная на зажим 17,
Для каждого станка-качалки типов СК и СКН может быть рассчитано расстояние Н (фиг.1 и 2) от нижней точ55 ки головки 2 балансира 1 до верхней поверхности рамы 9 станка-качалки для всех случаев, когда центры каждых двух пар отверстий кривошипов 3 лежаФ на дугах радиусом R.
новку станка-качалки, установку зажима на полированном штоке канатной подвески с винтами динамометрирования и насадку его на устьевой саль
НИК штангового насоса, а также поворачивание шатунов с пальцами и балансира станка-качалки и перестановку пальцев из одних отверстий его кривошипа в другие, при этом станок-качалку останавливают на расчетном расстоянии по вертикали от верхней поверхности рамы станка-качалки до нижнего конца головки балансира, а расстояние пальцев после установки и насадки зажима, поворачивая шатуны, корректирзтот, наклоняя балансир в ту или другую сторону посредством винтов динамометрирования, причем расчетное
arcs Iпв
,« 90 ) - h
з;
в +ж31333838
Рассмотрим перемещение переднего отверстия П в отверстие IV кривошипа (по фиг.1) пальца 5 кривошипа 3 (пе- 3. Из треугольника Ojll IV h R - ремещение заднего пальца кривошипа (Ж вращения кривошипа О.. происходит аналогично).iИз треугольника 0, сторона 0,0 Палец 5 движется по дуге D окруж- S , кости R при перестановке его изПодставляя значения h, , имеем
Е(г-а/ . |ЙТ17Т7.
Из треугольника 00, 0 сторона Из треугольника 00,0 00, + . Из треугольника. 2.
smoc, -,
,, сторона, лежащая против острого угла oi, ,6 + 00 f - 26 00,cosoi, ..arcsin-2- arcsin--S--После подстановок имеем - - iГГ Т 2
ж
Оь.- SnCCOS
Из треугольника OO Og{Н Н, - h - h, H,- a-sinei,- h,.
h. u .
s I n oi i Подставляя значения угла «i , имеем
H H, - a.sin(arccos -- S-ijLl4----2---- -- + ягг.1п--5-- - go) - h ,
2бл1в + .
где h a h jкосновения ставят станок-качалку на
Hj а-sin (об + /5 ) ,тормоз. Извлекают палец 5- из отверсгде |Ь- угол между балансиром и лини-тия. Балансир I стоит неподвижно,
ей,соединяющей ось поворота 35так как правая его часть с шатунами
с нижней точкой головки ба-4, траверсой и противогрузом балансилансира, град.ра всегда перетягивает левую, а
левая удерживается колонной штанг.
При перестановке пальца 5 кривоши-После этого перемещают палец 5 по
па 3 станка-качалки останавливают по- 40дуге радиусом R, что затруднений не
следний, ставят его на тормоз (невызывает из-за малой горизонтальной
показан), устанавливают между травер-составляющей веса, при этом палец 5
сами 12 и 13 канатной подвески 6должен попасть в новое отверстие,
винты 7 и на величину половины винтаЕсли палец не вставляется в отверс
раздвигают траверсы, после чего смот- 45тие, поворотом винтов 7 динамометрирят, из какого отверстия в какоерования добиваются совпадения пальца
нужно переставить палец 5, чему долж-5 с отверстием. Затем навинчивают
но соответствовать расстояние Н. Ли-гайки (не показаны) на пальцы 5, при
нейкой (метром) отмеряют расстояниенеобходимости снимают винты 7 динамоН и к нему приплюсовывают расстояние 50метрирования и запускают станок-каh от верхней поверхности рамы 9чалку в работу обычным способом, станка-качалки до верхней поверхности
зажима 17 (устьевого сальника 18, наФормула изобретения который устанавливается зажим полиоованного штокаj. На полированном gg Способ регулирования длины хода
(..jTOKe делают отметку, соответствующуюполированного штока канатной подвесli + h, и устанавливают зажим, послеки станка-качалки скважинной штангоего опускают плавно зажим 17 навой насосной установки, включающий
стьевой сальник 18 и в момент сопри-остановку станка-качалки, установку
Из треугольник . 2.
smoc, -,
,- 90 .
зажима на полированный шток канатной подвески с винтами динамометрирования и посадку его на устьевой сальник штангового насоса, а также поворачивание шатунов с ползунами и балансира станка-качалки и перестановку пальцев из одних отверстий его кривошипа в другие, отличающий- с я тем, что, с целью повьш1ения эффективности путем исключения тяжелой, трудоемкой и небезопасной операции по изменению положения баланН Н, - а sin(arccos--- -25rrArf------------- + rr. -90°) 2б4
+ ж
I
+ ж
де Н, - расстояние по вертикали от верхней поверхности рамы станка-качалки до оси его балансира, см; плечи балансира, см; расстояния от центра кривошипа до отверстий, в которые необходимо осуществить перестанов - ку пальцев шатуна , см;
и -б и д
1333838
сира в сборе с шатунами и пальцами, станок-качалку останавливают в положении на расчетном расстоянии по вертикали от верхней поверхности рамы станка-качалки до нижнего конца головки балансира, а расположение пальцев после установки и посадки зажима, поворачивая шатуны, корректируют, наклоняя балансир в ту или другую сторону посредством винтов динамометрирования, причем расчетное положение Н определяют из соотношения
-90°) I
+ ж
5
0
5
расстояние по горизонтали между осями вращения балансира и кривошипа, см; расстояние по вертикали между осями вращения балансира и кривошипа, см; длина шатуна, см; Ид - расстояние по вертикали
между осью вращения балансира .при его наклоне до нижней точки его головки.
ж R
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСТАНОВКИ ЗАЖИМА УСТЬЕВОГО ШТОКА | 1991 |
|
RU2020272C1 |
| ДИНАМОГРАФ ДЛЯ КОНТРОЛЯ РАБОТЫ СКВАЖИННЫХ ШТАНГОВЫХ НАСОСОВ | 1996 |
|
RU2113619C1 |
| Способ установки зажима устьевого штока | 1989 |
|
SU1751401A1 |
| СПОСОБ ДОБЫЧИ НЕФТИ С ИСПОЛЬЗОВАНИЕМ ШТАНГОВОГО ГЛУБИННОГО НАСОСА И СТАНОК-КАЧАЛКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2381383C1 |
| СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2016 |
|
RU2614296C1 |
| СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2016 |
|
RU2613477C1 |
| Станок-качалка | 1987 |
|
SU1617200A1 |
| СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2015 |
|
RU2594038C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМОМЕТРИРОВАНИЯ ШТАНГОВЫХ ГЛУБИННЫХ НАСОСОВ (ВАРИАНТЫ) | 2000 |
|
RU2176032C1 |
| ПРИВОД СКВАЖИННОГО, ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 1997 |
|
RU2133377C1 |

Изобретение относится к технике добычи нефти и позволяет повысить .экономичность. Станок-качалку останавливают на расчетном расстоянии Н по вертикали от верхней поверхности рамы станка-качалки до нижнего конца головки 2 балансира (Б) 1. Расположение пальцев 5 после установки и посадки зажима 17 корректируют, наклоняя Б I в ту или другую сторону посредством винтов динамометрирования. Такое выполнение позволяет .исключить трудоемкую и небезопасную работу по изменению положения Б 1 в сборе с шатунами 4 и пальцами 5. 3 ил. фиг, 1 DO 00 СО 00 с X /// /// //X 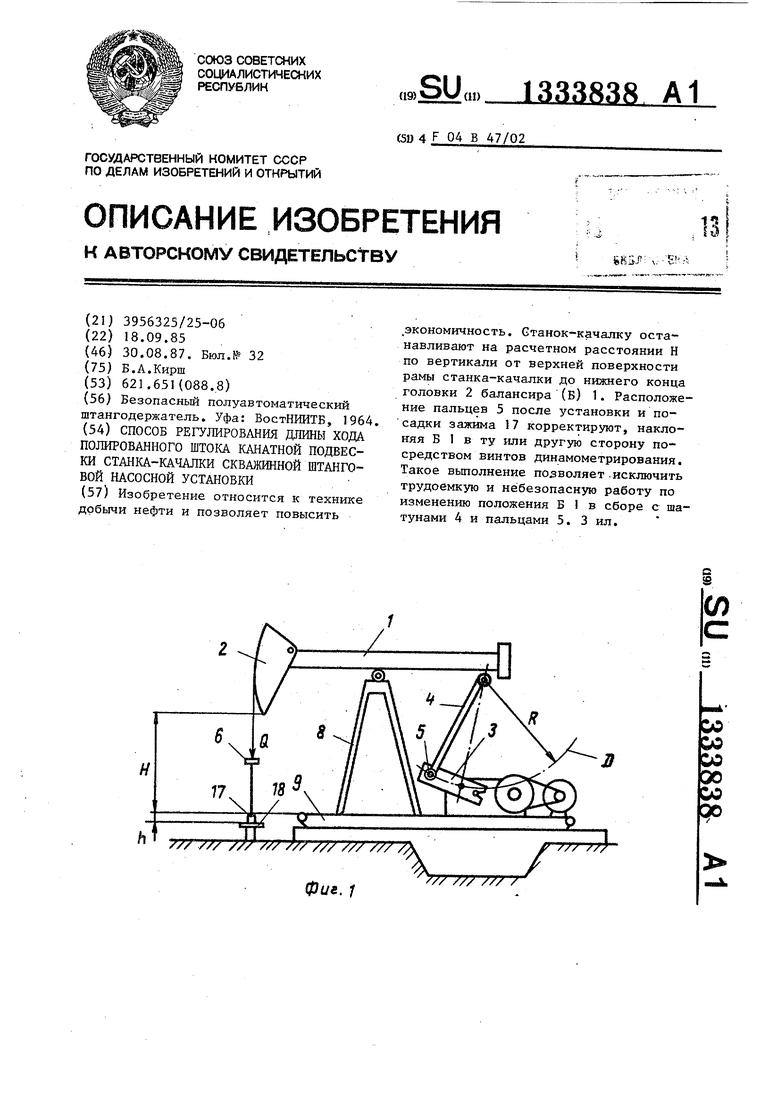
фи&,2
Составитель Э.Гинзбург Редактор И.Рыбченко Техред Л.Сердюкова
Заказ 3938/30 Тираж 574Подписное
ВНИИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г,Ужгород, ул.Проектная,4
фив.З
Корректор М.Шароши
| Безопасный полуавтоматический штангодержатель | |||
| Уфа: ВостНИИТБ, 1964. |
