Изобретение относится к нефтяной промышленности, в частности к технике глубинно-насосной штанговой эксплуатации при удержании глубинно-насосных штанг зажимом устьевого штока во время ремонта скважин.
Известен способ определения динамики и кинематики движения, в частности, головки балансира станка-качалки в эксплуатационном режиме работы последнего (Аливердизаде К. С. , Даниелян А.А. и др. Расчет и конструирование оборудования для эксплуатации нефтяных скважин. М.: Техиздат, 1959), включающий определение динамики движения точки крепления кривошипа к шатуну с переходом от него к заднему, а затем переднему плечам балансира, его головке, а следовательно, и к устьевому штоку, соединенного канатной подвеской с головкой балансира станка-качалки и проходящего через корпус устьевого сальника. Способ дает возможность определить действительные динамические усилия, возникающие в деталях и узлах станка-качалки в период его эксплуатации.
Недостатком способа является то, что он не дает возможность определить динамические пусковые нагрузки на устьевой шток, колонну глубинно-насосных штанг, детали и узлы самого станка-качалки, а также на зажим устьевого штока в период пуска и остановки станка-качалки, иногда преобладающие над эксплуатационными.
Известен способ (авт. св. СССР N 1751403, кл. F 04 B 47/00, 1989, прототип), включающий монтаж зажима на устьевом штоке, последующее нагружение зажима пробным усилием, превышающим рабочую нагрузку, для чего производят предварительную остановку балансира станка-качалки, обеспечивающую установку головки балансира в верхнем положении, затем установку зажима на устьевом штоке выше устьевого сальника, после чего осуществляют выключение тормоза и включение двигателя, опускание устьевого штока с зажимом до соприкосновения с устьевым сальником, а затем отключение электродвигателя и включение тормоза, останавливающего станок-качалку. Способ обеспечивает возможность за период неполного оборота кривошипа от эксплуатационного режима до остановки произвести проверку надежности установки зажима устьевого штока нагрузками, не превышающими допустимые.
Недостатком является то, что при работе на мощных, еще не приработанных станках-качалках, период остановки которых превышает время полного оборота кривошипа станка-качалки, нагрузить зажим избыточной нагрузкой не представляется возможным, что снижает глубину спуска глубинного насоса.
Целью изобретения является повышение надежности установки зажима устьевого сальника и увеличение долговечности глубинно-насосного оборудования.
Цель достигается тем, что способ установки зажима устьевого штока, соединенного канатной подвеской с головкой балансира станка-качалки и проходящего через корпус устьевого сальника, включает монтаж зажима на устьевом штоке с последующим нагружением зажима пробным усилием, превышающим рабочую нагрузку, для чего производят предварительную остановку балансира станка-качалки, обеспечивающую установку головки балансира в верхнем положении, затем установку зажима на устьевом штоке выше устьевого сальника, после чего осуществляют выключение тормоза и включение двигателя, опускание устьевого штока с зажимом до соприкосновения с устьевым сальником, а затем отключение электродвигателя и включение тормоза, останавливающего станок-качалку. Так как величина динамической нагрузки зависит от синусоидальной скорости качания головки зажим устанавливают на расчетной высоте Н от точки крепления головки к балансиру
H = Hск - Hскв ±  r cos
r cos  arcsin
arcsin  , где а - длина переднего плеча балансира;
, где а - длина переднего плеча балансира;
b - длина заднего плеча балансира;
r - радиус кривошипа;
n - число качаний балансира в минуту;
Нск - расстояние от верхнего основания рамы до оси качания балансира;
Нскв - расстояние от верхнего основания рамы до верха корпуса устьевого сальника;
m - коэффициент перегрузки;
g - ускорение земного притяжения;
Δt - период удара.
После соприкосновения зажима с крышкой устьевого сальника отключение электродвигателя и торможение станка-качалки производят во времени Tтор ≅ 
 3 - arcsin
3 - arcsin  (m - 1)
(m - 1) , так как требуется определенное время для торможения, если оно затянется, то траверса канатной подвески, пройдя нижнюю мертвую точку, поднимется до зажима канатной подвески и произойдет удар.
, так как требуется определенное время для торможения, если оно затянется, то траверса канатной подвески, пройдя нижнюю мертвую точку, поднимется до зажима канатной подвески и произойдет удар.
После соприкосновения зажима с корпусом устьевого сальника в случае недостаточного динамического нагружения процесс торможения производят при последующих динамических нагружениях тогда, когда станок-качалка войдет в режим установившегося движения, т.е. поворачивают еще на 360о и более.
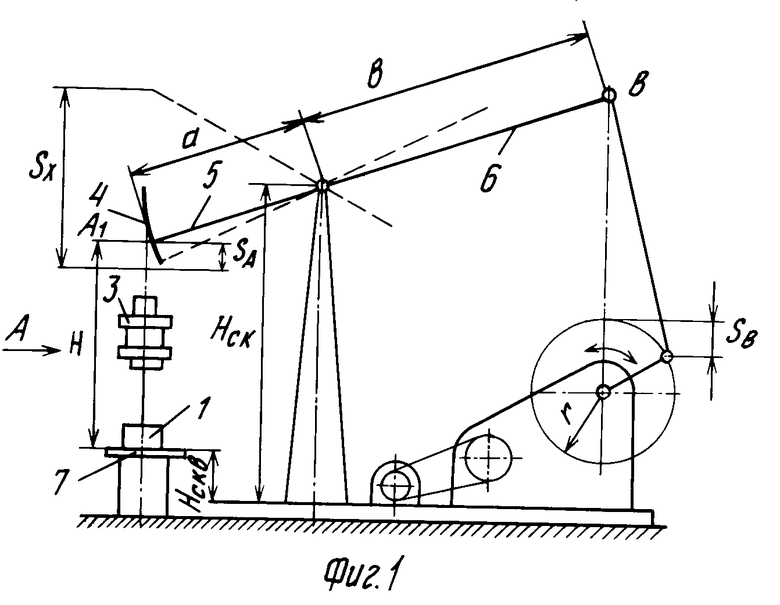
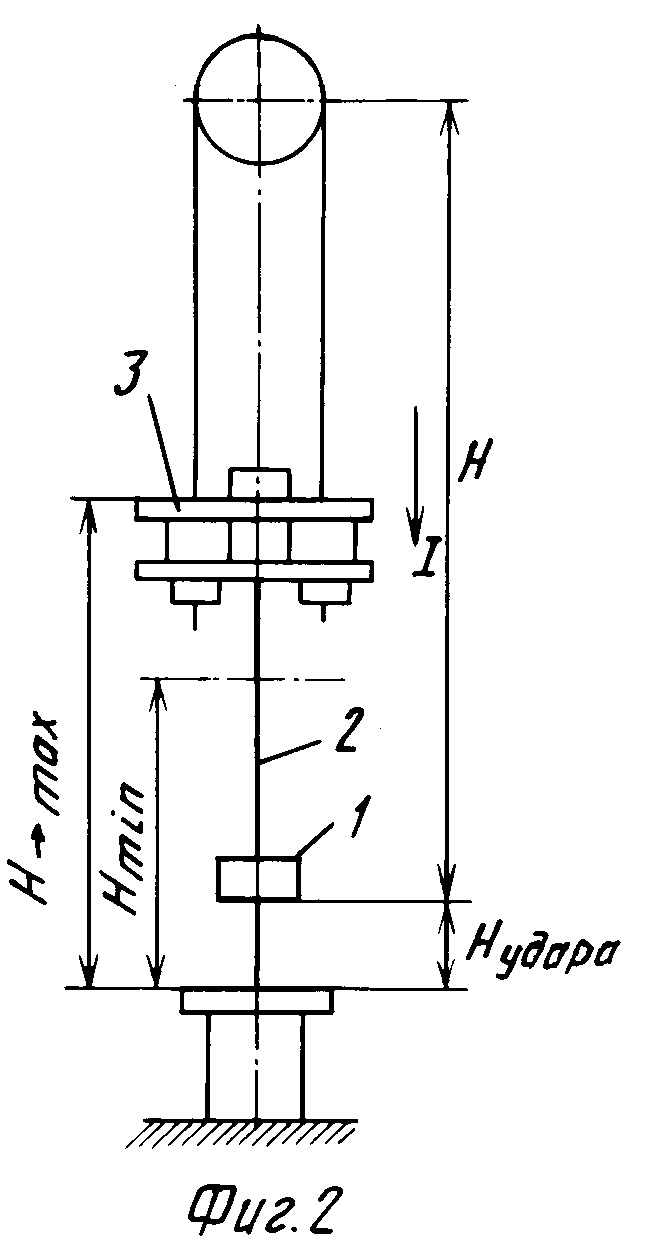
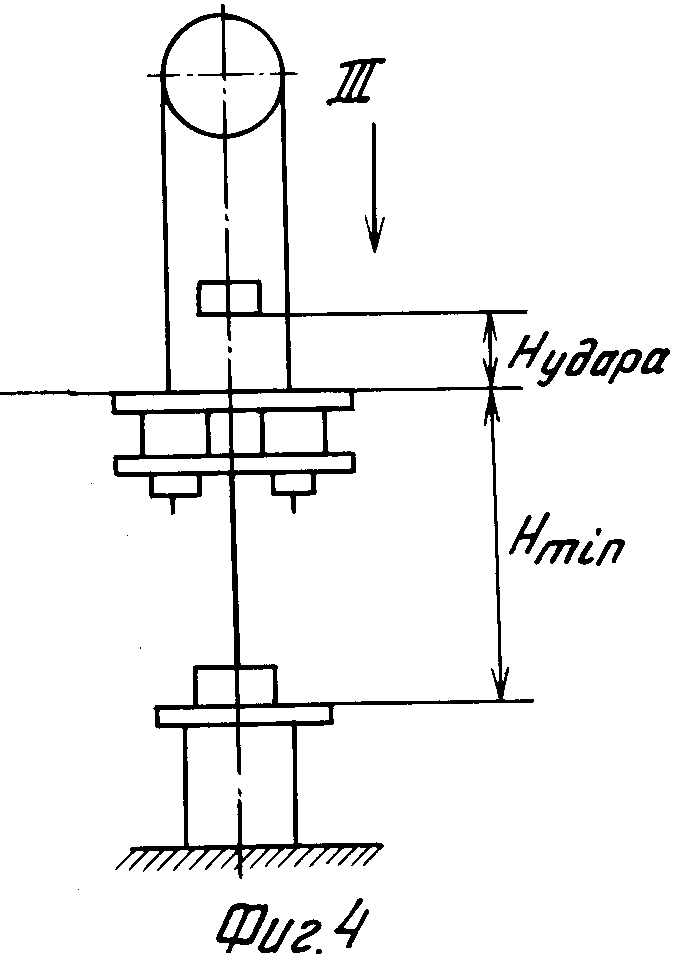
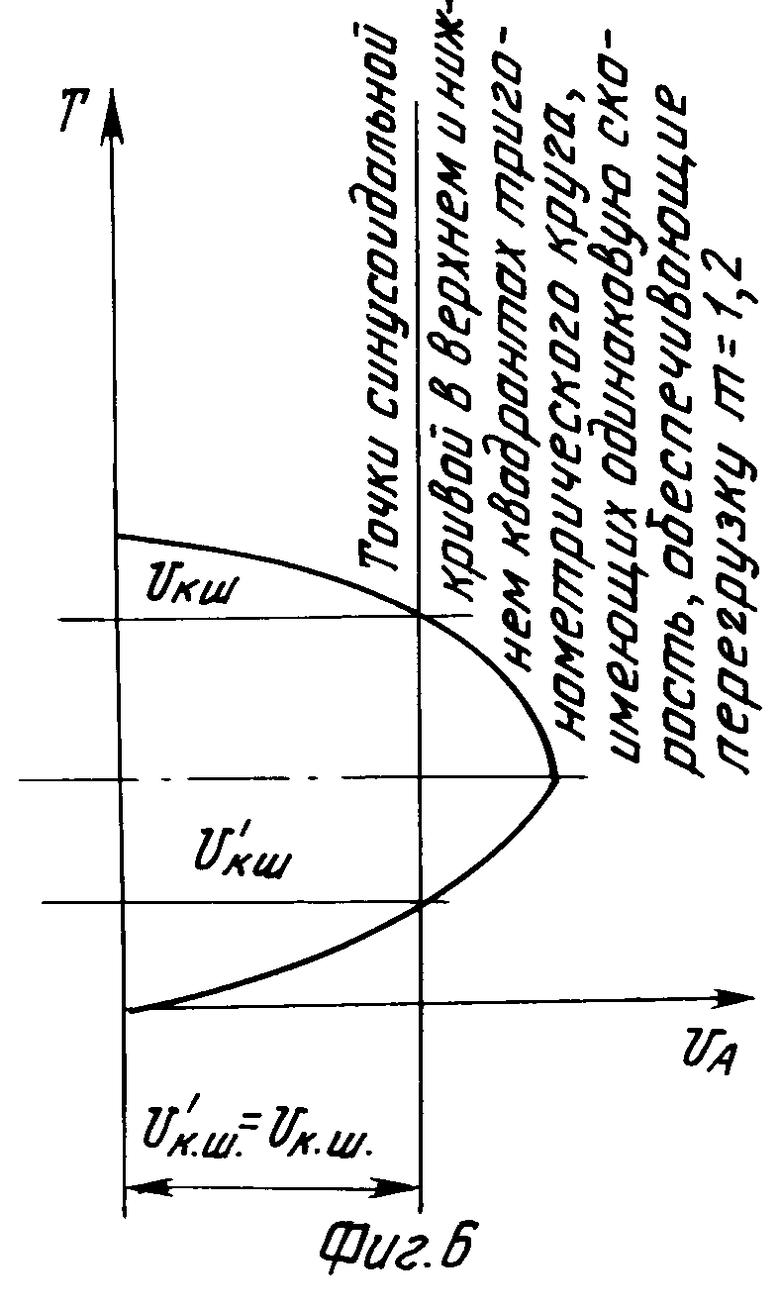
На фиг.1 показана схема станка-качалки с обозначением основных размеров плеч балансира, хода, высот, углов поворота и т.д.; на фиг.2 - вид сбоку на станок-качалку в положении, когда канатная подвеска занимает максимально поднятое положение; на фиг.3 - то же, когда зажим устьевого штока упирается в устьевой сальник; на фиг.4 - то же, когда зажим канатной подвески отрывается от ее траверс; на фиг.5 - тригонометрический круг изменения переменного угла ϕи подвижного радиуса r; на фиг.6 - синусоидальная кривая изменения скорости движения устьевого штока, где Т - время отсчета от верхней мертвой точки; V - скорость точки подвески штанг.
Способ установки зажима 1 устьевого штока 2, соединенного канатной подвеской 3 с головкой 4 балансира 5 станка-качалки 6 и проходящего через корпус устьевого сальника 7, осуществляют следующим образом.
Производят предварительную остановку станка-качалки в положении, близком к верхней мертвой точке,- показано на кривошипе (см. фиг.5) с H ->>макс , но не меньше чем Н (возможны варианты остановки в нижнем положении - угол ϕв верхнем квадранте тригонометрического круга). Монтируют (устанавливают) зажим 1 на устьевом штоке 2 выше устьевого сальника на расстоянии Н от точки А крепления головки 4 балансира 5 к последнему. Исходя из данного размера станка-качалки, расстояния от устьевого сальника скважины и других факторов, обеспечивается динамическая перегрузка с коэффициентом m от соприкасания зажима с устьевым сальником. Осуществляют выключение тормоза станка-качалки и одновременно включают двигатель станка-качалки. Кривошип вращается по часовой стрелке (см. фиг.5) из точки О1 или О3 в точку О2 или О4. Опускают устьевой шток с зажимом до соприкасания с устьевым сальником и в момент соприкасания его с корпусом сальника отключают электродвигатель и начинают включать тормоз станка-качалки так быстро, чтобы время Т≅2t1, где t1 - время движения вниз траверс канатной подвески после отрыва ее от зажима канатной подвески, обеспечивающее при этом поворот кривошипа при движении из точки О1 в О2 на угол 360о - ϕ1 и достижение установившегося режима работы станка-качалки в точке О2 в случае недостаточности динамического нагружения. Если время поворота на угол 360о - ϕ1 окажется не достаточным для того, чтобы набрать в точке О2установившейся режим, то в точке О3 не тормозят, а пропускают ее и процесс торможения производят при последующих динамических нагружениях, т.е. и далее поворачивают кривошип еще на 360о и производят торможение. Если и это окажется не достаточным, то поворачивают еще на 360о и т.д. до тех пор, пока в точке О2 не будет достигнут режим установившегося движения. После этого останавливают станок-качалку и производят необходимые ремонтные работы.
Определяют кинематику и динамику. Длину хода за время t, отсчитываемое с момента прохождения кривошипа через верхнее мертвое положение, считают началом движения
S = SB = r(1 - cos ϕ), где r - подвижный радиус кривошипа.
Угол поворота ϕможет быть выражен в зависимости от времени t
ϕ=ω t, (1) где ω- угловая скорость кривошипа.
SB = r(1 - cos ωt). Ход точки А
SA =  r(1-cos ωt), (2) заменяя ω через
r(1-cos ωt), (2) заменяя ω через 

 , где n - число качаний станка-качалки, имеем
, где n - число качаний станка-качалки, имеем
SA =  r(1-cos
r(1-cos  ). (3) Берут первую производную пути по времени и получают скорость
). (3) Берут первую производную пути по времени и получают скорость
VA =  =
=  sin
sin  . Время опускания (подъема) головки балансира равно
. Время опускания (подъема) головки балансира равно
t =  .
.
Значения сил, действующих на головку балансира в точке подвески штанг, берут без учета (из-за малости) сил трения последних о колонну НКТ при наихудшем случае, когда нижний всасывающий клапан не работает, тогда коэффициент надежности удержания зажимом колонны штанг следующий
m = 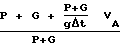 = 1 +
= 1 +  = 1 +
= 1 +  sin ϕ, где Р + G - вес колонны штанг и жидкости;
sin ϕ, где Р + G - вес колонны штанг и жидкости;
Δt - период удара ≈0,12.
Решая относительно ϕ имеют
ϕ = arc sin (m - 1)V. Подставляют ϕ в формулу SA
(m - 1)V. Подставляют ϕ в формулу SA
S =
=  r
r  1 - cos
1 - cos arc sin
arc sin  (m - 1)
(m - 1) , a Sx =
, a Sx =  2r .
2r .
Таким образом, место установки зажима на устьевом штоке от точки крепления головки балансира к последнему т. А будет
H = Hск-Hскв ∓ SA±  = Hск- Hскв±
= Hск- Hскв±  r cos
r cos arc sin
arc sin (m - 1)
(m - 1)
Знак (+) для синусоидальной функции берется в том случае, когда текущий угол ϕнаходится в нижней части квадранта тригонометрического круга шатунно-кривошипного механизма станка-качалки. Решая уравнение SAотносительно t, имеют
t =  arc cos
arc cos  1 -
1 -  подставив в него SA t =
подставив в него SA t =  arc cos
arc cos  1 - 1 + cos
1 - 1 + cos  arc sin
arc sin  (m - 1)
(m - 1)
t =  cos
cos cos
cos arc sin
arc sin (m - 1)
(m - 1) =
=  arc sin
arc sin (m - 1). При этом для избежания передачи значительной динамической нагрузки на станок-качалку, а лучше всего вообще для сведения ее к нулю время торможения должно быть
(m - 1). При этом для избежания передачи значительной динамической нагрузки на станок-качалку, а лучше всего вообще для сведения ее к нулю время торможения должно быть
Tтор ≅ 2 
 - t
- t =
= 
 3 - arcsin
3 - arcsin  (m - 1)
(m - 1) .
.
Применение способа позволяет снизить динамические нагрузки на станок-качалку при остановке на ремонт скважины, а также увеличить глубину спуска глубинного насоса, кроме того, проверить надежность монтажа зажима устьевого сальника, что ускоряет процесс за счет избежания повторных пусков и остановок станка-качалки, сокращения выхода из строя узлов и деталей глубинно-насосного оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ установки зажима устьевого штока | 1989 |
|
SU1751401A1 |
| Способ регулирования длины хода полированного штока канатной подвески станка-качалки скважинной штанговой насосной установки | 1985 |
|
SU1333838A1 |
| Станок-качалка | 1978 |
|
SU812965A1 |
| Устьевое оборудование для штанго-ВыХ глубиННОНАСОСНыХ СКВАжиН | 1979 |
|
SU802524A1 |
| Способ восстановления работоспособности скважины, эксплуатирующейся штанговым глубинным насосом, и вращающееся устройство для осуществления способа | 2021 |
|
RU2766170C1 |
| Способ монтажа динамографа и канатная подвеска для штанг | 1989 |
|
SU1707237A1 |
| СТАНОК-КАЧАЛКА | 1997 |
|
RU2135832C1 |
| Устьевое оборудование для штан-гОВыХ глубиННОНАСОСНыХ СКВАжиН | 1979 |
|
SU802523A1 |
| СТАНОК-КАЧАЛКА | 2005 |
|
RU2308614C2 |
| ДЛИННОХОДОВОЙ СТАНОК - КАЧАЛКА | 2014 |
|
RU2581256C2 |

Сущность изобретения: зажим устьевого штока устанавливают на расчетной высоте, определяемой по заданному соотношению, от точки крепления головки к балансиру. После соприкосновения зажима с крышкой устьевого сальника отключение электродвигателя и торможение станка-качалки производят в необходимое время. После соприкосновения зажима с корпусом устьевого сальника в случае недостаточного динамического нагружения процесс торможения производят при последующих динамических нагружениях, когда станок-качалка войдет в режим установившегося движения. 6 ил.
СПОСОБ УСТАНОВКИ ЗАЖИМА УСТЬЕВОГО ШТОКА, соединенного канатной подвеской с головкой балансира станка-качалки и проходящего через корпус устьевого сальника, заключающийся в монтаже зажима на устьевом штоке, включающий последующее нагружение зажима пробным усилием, превышающим рабочую нагрузку, для чего производят предварительную остановку балансира станка-качалки, обеспечивающую установку головки балансира в верхнем положении, затем установку зажима на устьевом штоке выше устьевого сальника, после чего осуществляют выключение тормоза и включение двигателя, опускание устьевого штока с зажимом до соприкосновения с устьевым сальником, а затем отключение электродвигателя и включение тормоза, останавливающего станок-качалку, отличающийся тем, что, с целью повышения надежности установки зажима устьевого сальника и увеличения долговечности глубинно-насосного оборудования, зажим устанавливают на расчетной высоте Н от точки крепления головки к балансиру, определяемой по формуле
H = Hск - Hскв ±  · r · cos
· r · cos  arcsin
arcsin  ,
,
где a - длина переднего плеча балансира;
b - длина заднего плеча балансира;
r - радиус кривошипа;
n - число качаний балансира, мин;
Hск - расстояние от верхнего основания рамы до оси качания балансира;
Hскв - расстояние от верхнего основания рамы до верха корпуса устьевого сальника;
m - коэффициент перегрузки;
g - ускорение земного притяжения;
Δ t - период удара,
а после соприкосновения зажима с крышкой устьевого сальника отключение электродвигателя и торможение станка-качалки производят за время
Tтор ≅ 
 3 - arcsin
3 - arcsin  (m - 1)
(m - 1) ,
,
а после соприкосновения зажима с корпусом устьевого сальника в случае недостаточного динамического нагружения процесс торможения производят при последующих динамических нагружениях тогда, когда станок-качалка войдет в режим установившегося движения.
| Скважинный штанговый насос | 1990 |
|
SU1751403A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
