Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока для точного позиционирования.
Цель изобретения - упрощение управления электроприводом,
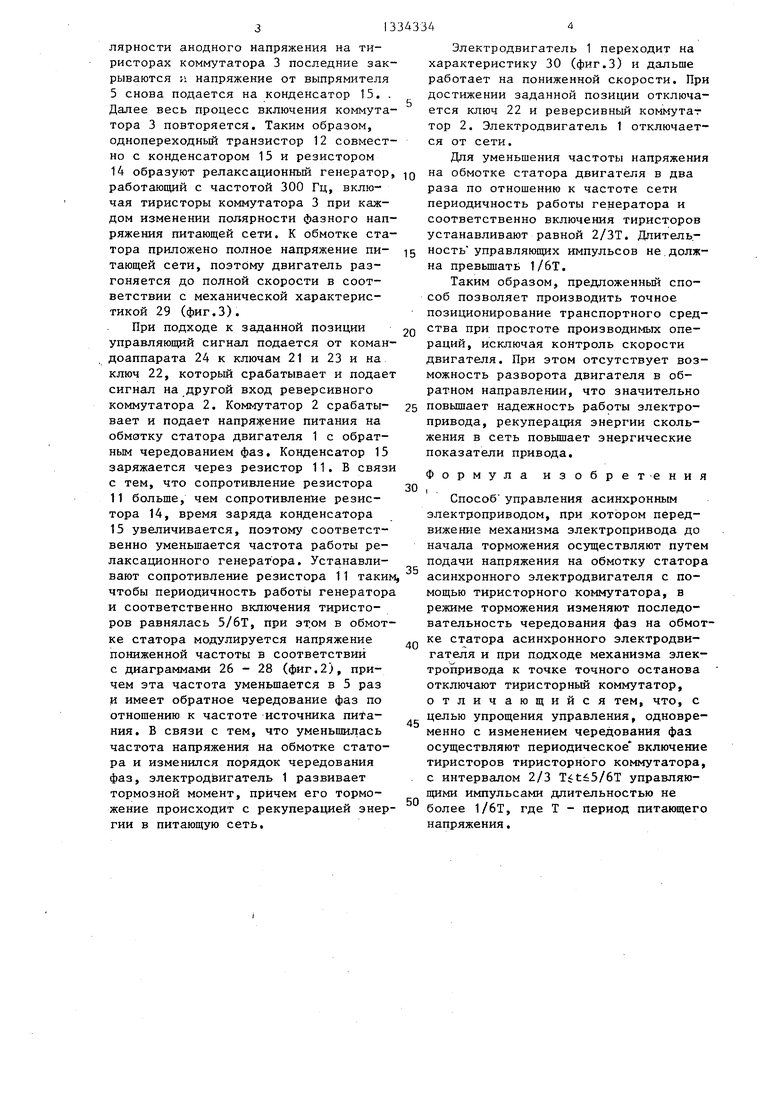
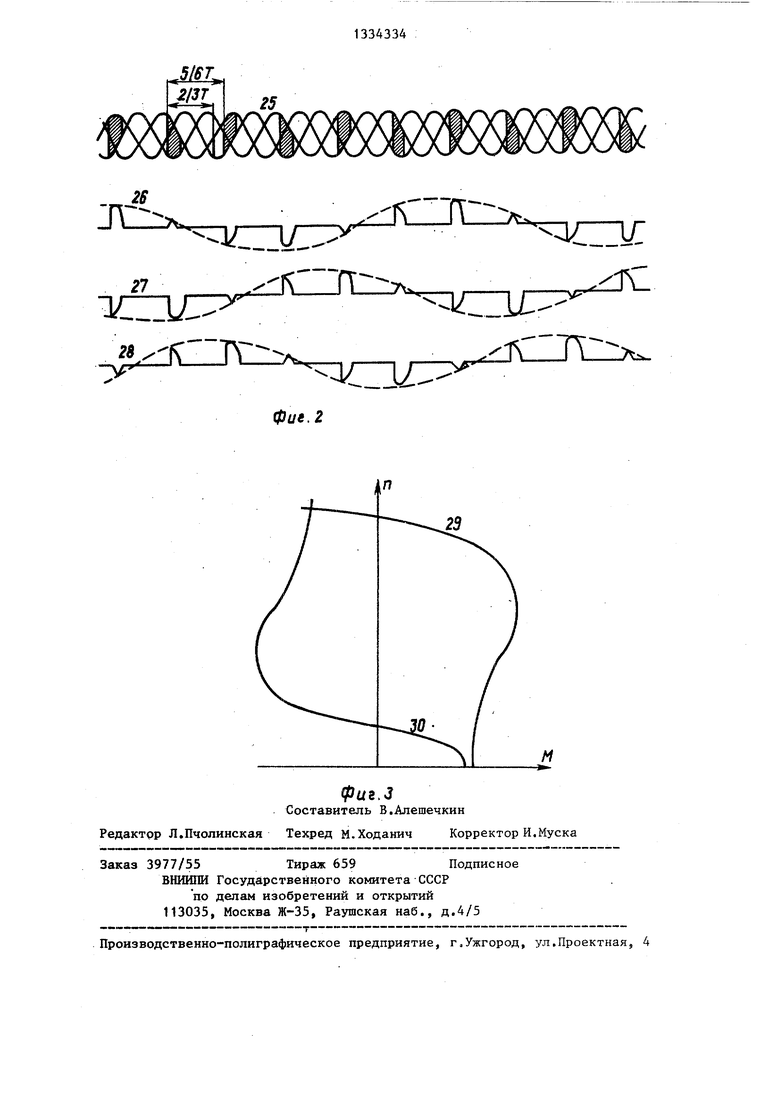
На фиг.1 представлена электричес- :кая принципиальная схема устройства, реализующего предлагаемый способ; на фиг.2 - диаграмма напряжений; на фиг.З - механические характеристики электродвигателя.
Устройство для управления асинхренным электроприводом содержит асин- tg няют чередование фаз источника питахронньш электродвигатель 1, обмотка статора которого одними выводами подключена к питающей сети через реверсивный коммутатор 2, а другими выводами - к тиристорному коммутатору 3, резисторам 4 и выпрямителю 5, выход которого подсоединен к резисторам 6-8. Вывод резистора 8 соединен с катодом стабилитрона 9, входом опт- ройного ключа 10 и через резистор 11 с эмиттером однопереходного транзистора 12, одна база которого связана с управляющим электродом тиристора 13, а другая - с катодом стабилитрона 9. Эмиттер транзистора 12 соединен через резистор 14 с выходом опт- ронного ключа 10 и через конденсатор 15 с выпрямителем 5 и анодом стабилитрона 9, Анод тиристора 13 подключен к положительному выводу,, а катод через резистор 16 - к отрицательному выпрямителя 5 и через резистор 17 и диоды 18 к управляющим электродам тиристоров коммутатора 3. Управляющий вход оптронного ключа 10 соединен с источником 19 постоянного тока через резистор 20 и ключ 21. Управляющие входы реверсивного коммутатора 2 связаны с выводом источника 19 постоянного тока через соответствующие ключи 22 и 23. Один выход командоаппарата 24 связан с управляющими входами ключей 21 и 23, а другой выход - с управляющим входом ключа 22.
Кроме того, приняты обозначения: 25-диаграмма напряжения питающей сети; 26 - диаграммы фазных, напряжений на обмотке статора асинхронного электродвигателя 1; 29 и 30 - соответст венно естественная и искусственная механические характеристики электродвигателя 1.
20
35
ния, осуществляя торможение двигателя 1 и переход на пониженную скорость за счет того, что тиристоры коммутатора 3 периодически включают через время 2/3T t T5/6T (где Т - период источника питания), причем управляющие импульсы, подаваемые на тиристорньш коммутатор, имеют длительность не более 1/6 Т. При достижении заданной
25 позиции источник питания отключают. Устройство для управления асинх- ронньш электроприводом работает следующим образом.
От командоаппарата 24 сигнал по3Q дается на ключи 21 и 23, которые
включаются и подают сигнал на включение реверсивного коммутатора 2 и опт- ронный ключ 10. Реверсивный коммутатор 2 включается, и напряжение от питающей сети подается на обмотку статора двигателя 1 и на..вьтрямитель 5. Конденсатор 15 заряжается от выпрямителя 5 через резисторы 6 и 8, открытый оптронный ключ 10 и резистор 14 После достижения напряжения на конденсаторе 15, равного напряжению пробоя однопереходного транзистора 12, последний открывается и конденсатор 15 разряжается через переход эмиттер - база транзистора 12, переход .управляющий электрод - катод тиристора 13 и резистор 16. Тиристор 13 открывается и управляющий импульс от выпрямителя 5 через резистор 17 и диоды 18 подается на управляющие электроды тиристоров коммутатора 3, имеющих в данный момент времени положительное анодное напряжение, Тиристоры коммутатора 3 открываются и замыкают обмотку статора двигателя 1 по схеме звезда. После открывания тиристоров коммутатор а 3 напряжение на выходе выпрямителя 5 принимает нулевое значение,, При изменении по40
45
50
55
Сущнэсть предложенного способа управления асинхронным электроприво- , дом для механизма точного позиционирования с тиристорным коммутатором 3 в цепи обмотки статора двигателя 1 заключается в следующем.
При задании на передвижение транспортного средства,например,от командо- аппарата 24 обмотку статора двигателя 1 подключают к питающей сети,двигатель запускается и работает на максимальной скорости. При подходе к заданной позиции транспортного средства изме
5
ния, осуществляя торможение двигателя 1 и переход на пониженную скорость за счет того, что тиристоры коммутатора 3 периодически включают через время 2/3T t T5/6T (где Т - период источника питания), причем управляющие импульсы, подаваемые на тиристорньш коммутатор, имеют длительность не более 1/6 Т. При достижении заданной
5 позиции источник питания отключают. Устройство для управления асинх- ронньш электроприводом работает следующим образом.
От командоаппарата 24 сигнал поQ дается на ключи 21 и 23, которые
включаются и подают сигнал на включение реверсивного коммутатора 2 и опт- ронный ключ 10. Реверсивный коммутатор 2 включается, и напряжение от питающей сети подается на обмотку статора двигателя 1 и на..вьтрямитель 5. Конденсатор 15 заряжается от выпрямителя 5 через резисторы 6 и 8, открытый оптронный ключ 10 и резистор 14 После достижения напряжения на конденсаторе 15, равного напряжению пробоя однопереходного транзистора 12, последний открывается и конденсатор 15 разряжается через переход эмиттер - база транзистора 12, переход .управляющий электрод - катод тиристора 13 и резистор 16. Тиристор 13 открывается и управляющий импульс от выпрямителя 5 через резистор 17 и диоды 18 подается на управляющие электроды тиристоров коммутатора 3, имеющих в данный момент времени положительное анодное напряжение, Тиристоры коммутатора 3 открываются и замыкают обмотку статора двигателя 1 по схеме звезда. После открывания тиристоров коммутатор а 3 напряжение на выходе выпрямителя 5 принимает нулевое значение,, При изменении по0
5
0
5
лярности анодного напряжения на тиристорах коммутатора 3 последние закрываются я напряжение от выпрямителя 5 снова подается на конденсатор 15. . Далее весь процесс включения коммутатора 3 повторяется. Таким образом, однопереходный транзистор 12 совместно с конденсатором 15 и резистором
14образуют релаксационньш генератор, работающий с частотой 300 Гц, включая тиристоры коммутатора 3 при каждом изменении полярности фазного напряжения питающей сети. К обмотке статора приложено полное напряжение питающей сети, поэтому двигатель разгоняется до полной скорости в соответствии с механической характеристикой 29 (фиг.З).
При подходе к заданной позиции управляющий сигнал подается от коман- доаппарата 24 к ключам 21 и 23 и на ключ 22, который срабатывает и подает сигнал на другой вход реверсивного коммутатора 2. Коммутатор 2 срабатывает и подает напряжение питания на обмэтку статора двигателя 1 с обратным чередованием фаз. Конденсатор 15 заряжается через резистор 11. В связи с тем, что сопротивление резистора 11 больше, чем сопротивление резистора 14, время заряда конденсатора
15увеличивается, поэтому соответственно уменьшается частота работы релаксационного генератора. Устанавливают сопротивление резистора 11 таким чтобы периодичность работы генератора и соответственно включения тиристоров равнялась 5/6Т, при этом в обмотке статора модулируется напряжение пониженной частоты в соответствии
с диаграммами 26 - 28 (фиг.2), причем эта частота уменьшается в 5 раз и имеет обратное чередование фаз по отношению к частоте источника питания. В связи с тем, что уменьшилась частота напряжения на обмотке статора и изменился порядок чередования фаз, электродвигатель 1 развивает тормозной момент, причем его торможение происходит с рекуперацией энергии в питающую сеть.
5
0
Электродвигатель 1 переходит на характеристику 30 (фиг.З) и дальше работает на пониженной скорости. При достижении заданной позиции отключается ключ 22 и реверсивньш коммутат тор 2. Электродвигатель 1 отключается от сети.
Для уменьшения частоты напряжения на обмотке статора двигателя в два раза по отношению к частоте сети периодичность работы генератора и соответственно включения тиристоров устанавливают равной 2/ЗТ. Длительность управляющих импульсов не.должна превьш1ать 1/бТ.
Таким образом, предложенный способ позволяет производить точное позиционирование транспортного средства при простоте производимых операций, исключая контроль скорости двигателя. При этом отсутствует возможность разворота двигателя в обратном направлении, что значительно 5 повьш1ает надежность работы электропривода, рекуперация энергии скольжения в сеть повьш1ает энергические показатели привода.
Формула изобретения
Способ управления асинхронным электроприводом, при котором передвижение механизма электропривода до начала торможения осуществляют путем подачи напряжения на обмотку статора асинхронного электродвигателя с помощью тиристорного коммутатора, в режиме торможения изменяют последовательность чередования фаз на обмотке статора асинхронного электродвигателя и при подходе механизма электропривода к точке точного останова отключают тиристорный коммутатор, отличающийся тем, что, с целью упрощения управления, одновременно с изменением чередования фаз осуществляют периодическое включение тиристоров тиристорного коммутатора, с интервалом 2/3 управляющими импульсами длительностью не более 1/бТ, где Т - период питающего напряжения.
.SIST,
f
IdLC
jCJHlr.
г
-у
J
iciir
/ГС
фие.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости асинхронного электродвигателя | 1981 |
|
SU1037402A1 |
| Устройство для управления тиристорным циклоконвертором | 1981 |
|
SU1119160A1 |
| Электропривод постоянного тока | 1990 |
|
SU1709487A1 |
| ЧАСТОТНЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2581629C1 |
| Устройство для динамического торможения трехфазного асинхронного электродвигателя | 1990 |
|
SU1780138A1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1984 |
|
SU1192095A1 |
| Электропривод | 1980 |
|
SU871290A1 |
| Электропривод переменного тока | 1984 |
|
SU1259456A1 |
| ОДНОФАЗНО-ТРЕХФАЗНЫЙ РЕВЕРСИВНЫЙ КОММУТАТОР | 2007 |
|
RU2344540C2 |
| ПОЛУПРОВОДНИКОВОЕ УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ОДНОФАЗНОГО ДВУХОБМОТОЧНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2403669C1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока для точного позиционирования. Цель изобретения - упрощение управления. Для достижения этой цели торможение электродвигателя производится посредством изменения чередования фаз на обмотке статора синхронного электродвигателя 1 с одновременной периодической коммутацией тиристоров ти- ристорного коммутатора 3 с интервалом 2/3 5/6 Т управляющими импульсами длительностью не более 1/6 Т, g где Т - период питакнцего напряжения. В этом случае электродвигатель вхо- С/ дит в зону точного останова на попеременной скорости и это исключает необходимость ее контроля. 3 ил. СО 00 4; со со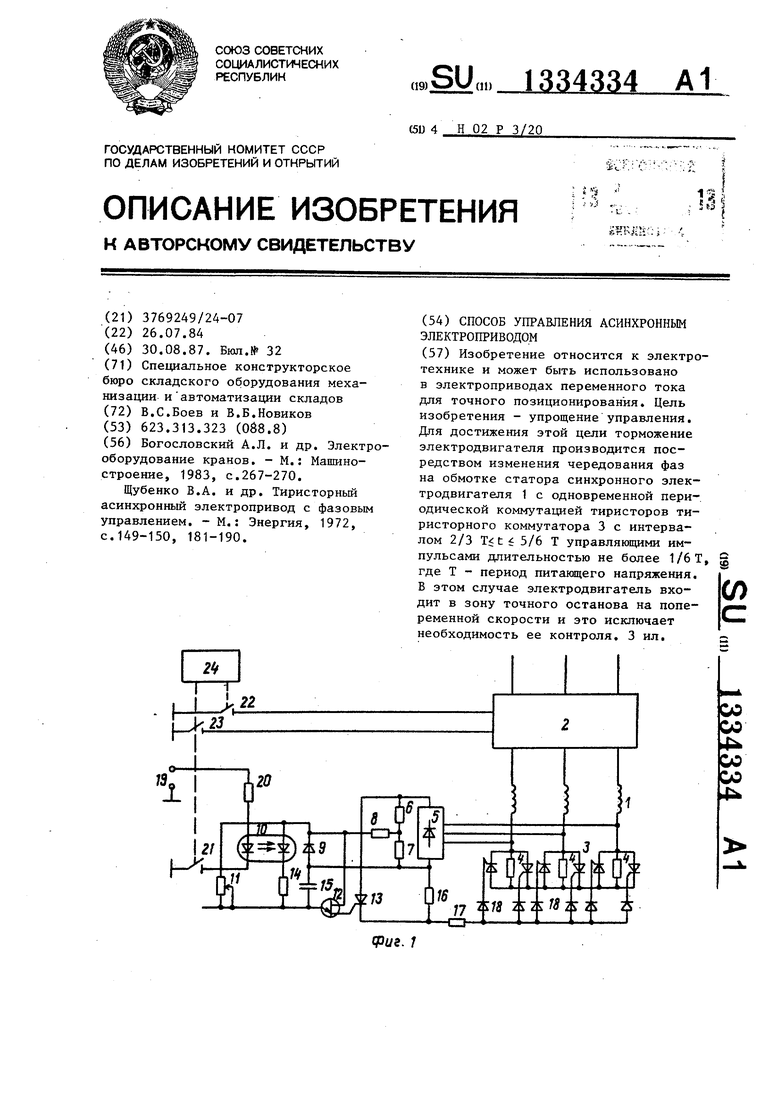
23
фиг.З
Составитель В.Алешечкин
Редактор Л.Пчолинская Техред м.Ходанич
Заказ 3977/55 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор И.Муска
| Богословский А.Л | |||
| и др | |||
| Электрооборудование кранов | |||
| - М.: Машиностроение, 1983, с.267-270 | |||
| Щубенко В.А | |||
| и др | |||
| Тиристорный асинхронный электропривод с фазовым управлением | |||
| - М.: Энергия, 1972, с.149-150, 181-190. |
