Изобретение относится к электротехнике, в частности к преобразовательной технике, и может быть использовано для интенсификации технологических процессов с использованием индукционного нагрева,ультразвука и др.
Целью изобретения является повышение надежности работы преобразователя частоты за счет повышения устойчивости и точности работы системы экстремального регулирования.
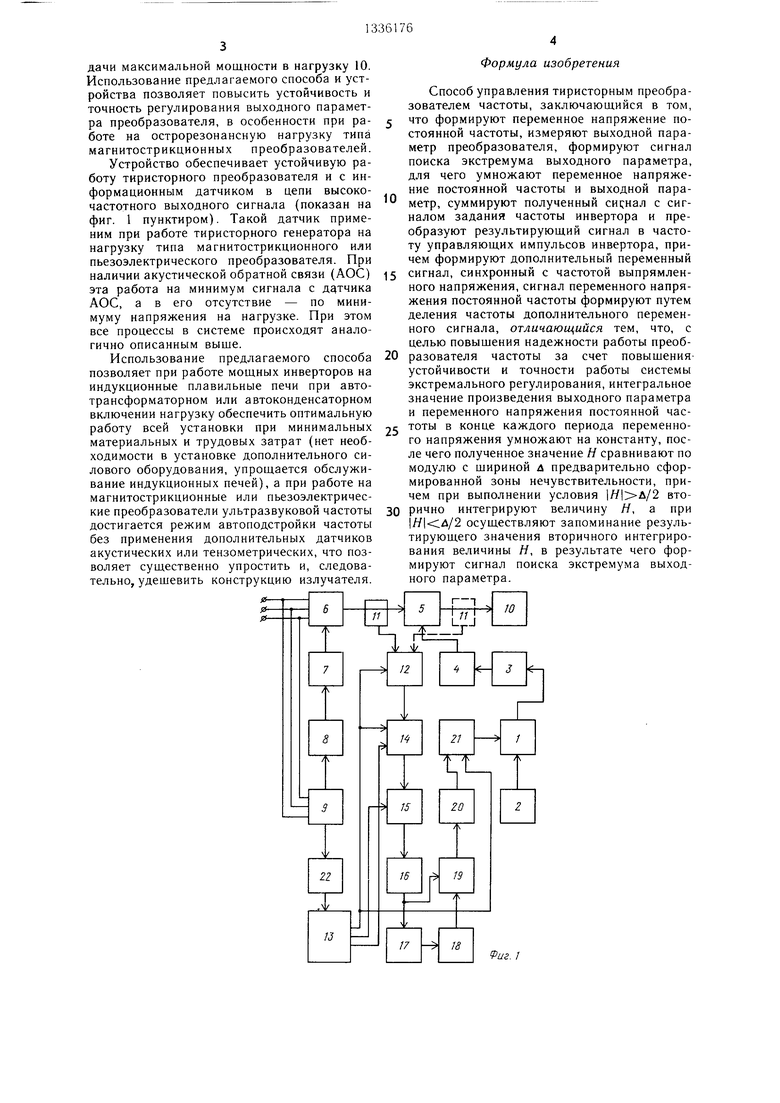
На фиг. 1 представлена блок-схема устройства, реализуюш.его способ; на фиг. 2 - временные диаграммы, поясняющие работу устройства.
Блок-схема (фиг. 1) содержит управляемый задающий генератор 1 с командным устройством 2, служащим для пуска и останова инвертора, распределитель 3 импульсов с выходными формирователями 4, связанными с управляющими переходами силовых тиристоров автономного последовательного инвертора 5, питаемого от сети через управляемый силовой выпрямитель 6, на управление тиристорами которого поступают импульсы с выходов усилителей 7, управляемых фазосдвигающим блоком 8, на вход которого поступают импульсы от синхронизатора 9. Выход инвертора 5 подсоединен к нагрузке 10, имеющей резонансный характер. Датчик 11 тока, который может стоять как в цепи постоянного тока, так и в цепи переменного тока (показан пунктиром) через блок 12 умножения, на вход которого поступают импульсы с одного из выходов дешифратора 13, связан с входом интегратора 14, управляемого импульсами как с предыдущих, так и с другого выходов дешифратора 13. Выход интегратора 14 связан со входом первого ключевого устройства 15, управляемого импульсами с одного из выходов дешифратора 13, выход которого в свою очередь подключен к входу усилителя 16. Выходной сигнал усилителя 16 выпрямляется выпрямителем 17 и поступает на вход схемы 18 выделения нуля, которая управляет вторым ключевым устройством 19, информационный вход которого соединен с выходом усилителя 16. Выход второго ключевого устройства 19 связан с входом интегратора 20, выходной сигнал которого поступает на один из входов сумматора 21, управляющего частотой задающего генератора 1. Дешифратор 13 управляется импульсами с выходов счетчика 22, который считает импульсы с выхода синхронизатора 9.
Устройство работает следующим образом.
Выходной сигнал с датчика 11, установленного, например в цепи постоянного потребляемого тока имеет вид изображенный на фиг. 2 а. Режим максимального входного тока соответствует максимуму выходной мощности в мощных индукционных нагревательных установках. При подаче питающего напряжения с выхода синхронизатора 9 на
0
5
0
5
0
5
0
5
0
5
вход счетчика 22 поступают синхроимпульсы, соответствующие частоте пульсаций выпрямленного напряжения, питающего инвертор 5 (фиг. 2 б). На выходах дешифратора формируются импульсные сигналы с первого выхода (фиг. 2 в), со второго выхода (фиг. 2 г) и с третьего выхода (фиг. 2 д). При этом один и тот же сигнал с перваго выхода дещифратора 13 поступает одновременно на «Качание частоты задающего генератора 1 через сумматор 21 и на вход блока 12 умножения, обеспечивая синхронно с «KaKa-iHeM частоты смену знака входного сигнала (фиг. 2 е). Сформированный таким образом информационный сигнал поступает на вход интегратора 14, который сигналом со второго выхода дещифратора 13 переводится в режим «Запоминание (фиг. 2 ж). Этим же сигналом замыкается ключевое устройство 15, подключая выход интегратора 14 к входу усилителя 16, на выходе которого формируется сигнал по длительности совпадающий с временем замкнутого состояния ключа 15. Выходной сигнал с усилителя 16 (фиг. 2 з) выпрямляется выпрямителем 17 (фиг. 2 ы) и поступает на вход схемы 18 выделения нуля, обладающей определенной зоной нечувствительности. Если сигнал с выхода выпрямителя 17 лежит в пределах ширины зоны нечувствительности, на выходе схемы 18 выделения нуля формируется сигнал положительной полярности (фиг. 2 к), который поступает на управляющий вход ключевого устройства 19 и поддерживает его в разомкнутом состоянии. При превышении сигналом с выхода выпрямителя 17 ширины зоны нечувствительности схемы 18 выделение нуля на выходе последней формируется сигнал отрицательной полярности, замыкающий ключевое устройство 19, через которое импульс с выхода усилителя 16 поступает на вход интегратора 20, откуда сигнал поступает на вход сумматора 21 и вызывает движение рабочей точки по резонансной характеристике нагрузки в сторону имеющегося экстремума. Выходной сигнал сумматора 21 показан на фиг. 2 л. Сигналом с третьего выхода дешифратора 13 в интеграторе осуществляется «обнуление выходного сигнала и, таким образом, интегратор подготавливается к очередной операции последовательного интегрирования -- вычитанияинформационного сигнала
(.фиг. 2 ж). Так как сигнал поиска экстремума формируется путем вторичного интегрирования разностного сигнала результат сравнения энергетических характеристик информационного сигнала, то движение к экстремуму происходит плавно, без возникновения автоколебаний, до того .момента, иска разностный интегральный сигнал не попадет в зону нечувствительности схемы 18 выделения нуля, после чего интегратор 20 переводится в режим «Запоминание и преобразователь частоты работает в режиме отдачи максимальной мощности в нагрузку 10. Использование предлагаемого способа и устройства позволяет повысить устойчивость и точность регулирования выходного параметра преобразователя, в особенности при работе на острорезонансную нагрузку типа магнитострикционных преобразователей.
Устройство обеспечивает устойчивую работу тиристорного преобразователя и с информационным датчиком в цепи высокочастотного выходного сигнала (показан на фиг. 1 пунктиром). Такой датчик применим при работе тиристорного генератора на нагрузку типа магнитострикционного или пьезоэлектрического преобразователя. При наличии акустической обратной связи (АОС) эта работа на минимум сигнала с датчика АОС, а в его отсутствие - по минимуму напряжения на нагрузке. При этом все процессы в системе происходят аналогично описанным выше.
Использование предлагаемого способа позволяет при работе мощных инверторов на индукционные плавильные печи при автотрансформаторном или автоконденсаторном включении нагрузку обеспечить оптимальную работу всей установки при минимальных материальных и трудовых затрат (нет необходимости в установке дополнительного силового оборудования, упрощается обслуживание индукционных печей), а при работе на магнитострикционные или пьезоэлектрические преобразователи ультразвуковой частоты достигается режим автоподстройки частоты без применения дополнительных датчиков акустических или тензометрических, что позволяет существенно упростить и, следовательно, удешевить конструкцию излучателя.
0
5
Формула изобретения
Способ управления тиристорным преобразователем частоты, заключающийся в том, что формируют переменное напряжение постоянной частоты, измеряют выходной параметр преобразователя, формируют сигнал поиска экстремума выходного параметра, для чего умножают переменное напряжение постоянной частоты и выходной параметр, суммируют полученный си1:нал с сигналом задания частоты инвертора и преобразуют результирующий сигнал в частоту управляющих импульсов инвертора, причем формируют дополнительный переменный сигнал, синхронный с частотой выпрямленного напряжения, сигнал переменного напряжения постоянной частоты формируют путем деления частоты дополнительного переменного сигнала, отличающийся тем, что, с целью повышения надежности работы преоб0 разователя частоты за счет повышения устойчивости и точности работы системы экстремального регулирования, интегральное значение произведения выходного параметра и переменного напряжения постоянной час5 тоты в конце каждого периода переменного напряжения умножают на константу, после чего полученное значение Нсравнивают по модулю с шириной л предварительно сформированной зоны нечувствительности, причем при выполнении условия вто0 рично интегрируют величину Я, а при осуществляют запоминание результирующего значения вторичного интегрирования величины Н, в результате чего формируют сигнал поиска экстремума выходного параметра.
6
г д
п п п Л
Л
ж
а к
/I
п
Фаг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления преобразователем частоты и устройство для его реализации | 1982 |
|
SU1069123A1 |
| Способ регулирования частоты резонансного инвертора | 1988 |
|
SU1690133A1 |
| Устройство для управления тиристорным преобразователем частоты | 1986 |
|
SU1573513A1 |
| Способ управления преобразователем частоты со звеном постоянного тока | 1986 |
|
SU1443097A1 |
| Устройство для автоматической настройки компенсации | 1987 |
|
SU1520626A1 |
| РЕЗОНАНСНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ | 1993 |
|
RU2072619C1 |
| РЕЗОНАНСНЫЙ ИНВЕРТОР ТОКА | 1993 |
|
RU2072618C1 |
| Двухзонная установка для индукционного нагрева | 1983 |
|
SU1092758A1 |
| Преобразователь значения коэффициента модуляции амплитудно-модулированного сигнала | 1986 |
|
SU1379750A1 |
| Преобразователь переменного напряжения в постоянное | 1985 |
|
SU1270849A1 |

Изобретение относится к электротехнике и может быть использовано в ти- ристорных преобразователях частоты. Цель изобретения - повышение надежности работы. В данном способе интегральное значение произведения выходного параметра и переменного напряжения постоянной частоты в конце каждого периода переменного напряжения умножают на константу, полученное значение сравнивают с шириной зоны нечувствительности и в случае, если оно в два раза больше указанной ширины, вторично ее интегрируют, в результате чего движение к экстремуму происходит плавно, без возник- новения автоколебаний. 2 нл.2 СО со 05 Ot)
| Беркович Е | |||
| И | |||
| и др | |||
| Тиристорные преобразователи высокой частоты.-Л.: Энергия, 1973, с | |||
| Канатное устройство для подъема и перемещения сыпучих и раздробленных тел | 1923 |
|
SU155A1 |
| Способ управления преобразователем частоты и устройство для его реализации | 1982 |
|
SU1069123A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
