Изобретение относится к магнитным измерениям и нредназначено для исследования постоянных магнитных нолей болыиой протяженности, используемых, в частности, в :),лектрофизической аннаратуре и ускорителях заряженных частиц.
Цель изобретения - новьииемие точности измерений.
На фиг. 1 показана упрощенная схема механической части устройства; на фиг. 2 - блок-схема электрической части устройства; на фиг. 3схема варианта выполнения
комненсатора силы тяжести, включающего три однотипных звена; на фиг. 4конструкция одногч) звена комненсатора силы тяжести.
Л ехапическая часть устройства содержит корпус 1, раму 2, на последней закрен- .1ГНЫ коаксиально один относительно другого л кругоиых Е итков. Выводы круговых витков с помощью гибких токоподводов 3 5, вынол- ноиньгх каждый в виде свитой пары изолированных проводников, соединены с уста- повлеп1П11ми на корпусе 1 гокоподводами Г. 11.
. помощью 1Д|бких связей 12 14 через .тагчики 15 7 си. 1ы рама 2 нодвеи1ена к корпусу 1. Через компенсатор 18 силы тяжести рама 2 связана с корпусом 1. Ком- пепсатор 18 силы тяжесги выполнен, например, па оспове рычага 19, шарпирно закрен- лен11()1 о па корпусе 1, гибк)й связи 20, соединяющей пептр рамы 1 с коппом рычага 19, па BTOptJM копне кото)ого закреп.:1еп |||)огпвовес 21.
Элект()пческая часть устройства {фи1 . 2) включает источник 22 ностоянного тока, из- ме)пте,:1ь 23 постоянного тока, коммутатор 24 и измерительный прибор 25. Выход источника 22 постоянного тока через измеритель 2,3 П()сгоянпо14) тока подключен к токовому входу коммутатора 24, выводы токового выхода пос, 1едпе1Ч) подключены к круговым виткам соответс I вепно через токоподводы f) 1 1 и гибкие токоподводы 3 5. Коммута- гор 24 обеспечивает включение в цепь тока источника 22 любо1 о выбранно1Ч) кругового витка, а также поочередное подключение измерительного прибора 25 к выходам датчиков силЬ) 15 17. Датчики 15 17 силы механически связаны с рамой 2/связи показаны пункти1)ом, фиг. 2/.
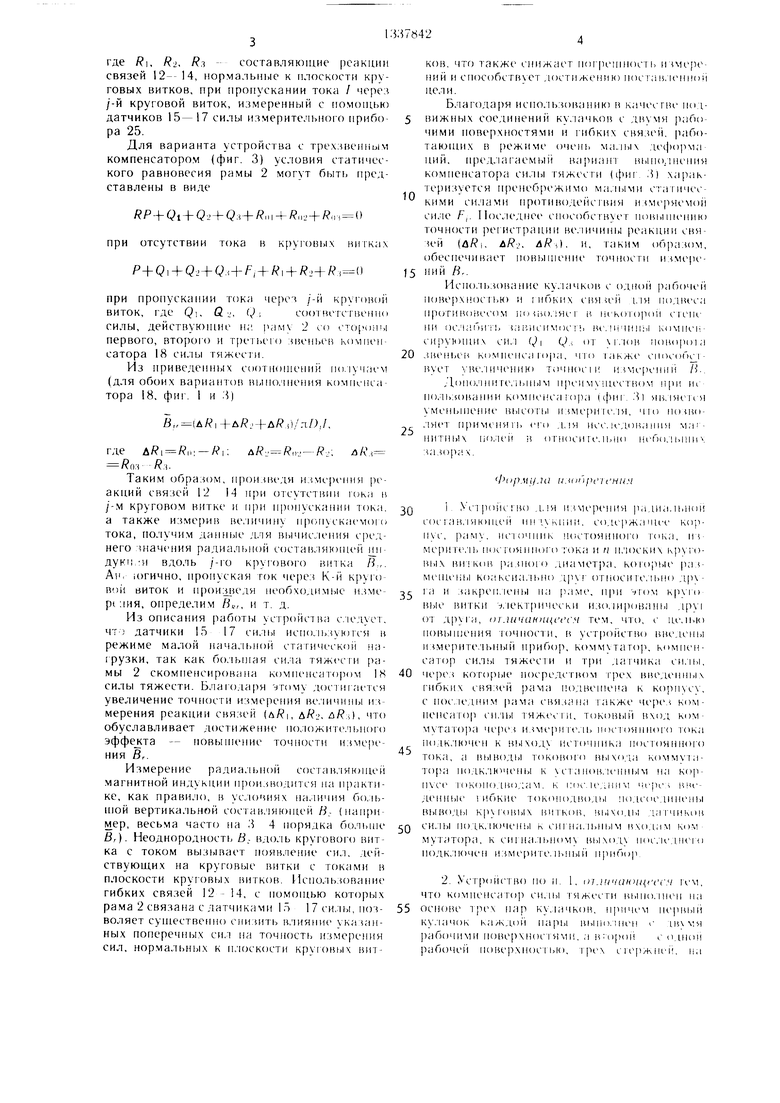
Предлагаемый вариант выполнения компенсатора силы тяжести (фиг. 3) включает 3 одпотипиых звена. Каждое из этих звеньев содержит по одному кулачку с двумя рабочими поверхностями и по одиому кулачку с одной рабочей поверхностью (соответственно кулачки 20 28 и 29 31). Пары кулачков (26 и 29, 27 и 30, 28 и 31) закреплены С001 негственно на копнах стержней 32 34. (л)ответствук)1цие рабочие поверхности кулачков 26 28 посредством гибких связей .55 37 соеди)1епы с рамой 2, а посредством гибких свя.чей 38 40 с корпусом I. Про0
5
0
тивовесы 41-43 подвешены к рабочим поверхностям кулачков 29-31 соответственно с помощью гибких связей 44-46.
В процессе подготовки к работе устройство устанавливают в исследуемое магнитное ноле, плоскость круговых витков совмещают с плоскостью, в которой необходимо измерить радиальную составляющую индукции магнитного поля.
Настройкой компенсатора 18 силы тяжести устанавливают величину силы натяжения гибких связей 12-14, при которой обеспечивается оптимальный (с точки зрения получения высокой точности измерения силы) режим работы датчиков 15-17 силы.
Устройство работает следующим образом.
Силы натяжения гибких связей 12-14 регистрируются измерительным прибором 25, на вход которого через коммутатор 24 носту- пают сигпа.чы с выходов датчиков 15- 17 силы. Рама 2 находится в статическом равновесии нри условии
P+Q + /( + ,
5
0
где Я
Q
сила тяжести, деиствуюнгая на раму 2;
сила, действующая на раму 2 со стороны комненсатора 18;
/,П, R,r2.
Rm - соответственно реакции связей 12
14, нормальные к плоскости круговых витков, при отсутствии тока в круговых витках а - п. При иропускании тока / через / -и круговой виток на f-й элемент длины д// этого витка действует сила
35
Af,,.,i/f,
где В,
радиальная составляющая индукции магнитного поля в зоне этого элемента.
Сила if,, нерпендикулярна плоскости кругового витка.
На весь /-и круговой виток, содержаний т элементов длины, действует сила
F, /X В,,Л1, AI
45
или
F,nlB,,D,,
где В,
,vf - среднее
значение радиальной составляющей индукции магнитного поля в области расположения ;-го кругового витка; D, - диаметр /-го кругового витка. При пропускании тока / через /-Й круговой виток рама 2 находится в статическом равновесии ири условии
°+Q + / , + + .)0,
где R, R2, - составляющие реакции связей 12- 14, нормальные к плоскости круговых витков, при пропускании тока / через /-Й круговой виток, измеренный с IOMOHI,) датчиков 15-17 силы измерительного прибо ра 25.
Для варианта устройства с трехзвенным компенсатором (фиг. 3) условия статического равновесия рамы 2 могут быть представлены в виде
RP+Qi+Q2+Q:i+R n + R,,2+Rnt(}
при отсутствии тока в круговых нитках
P+Q, + Q,+Q.-.+Fi + Rt + R,+ R,()
при пропускании тока че)оз /-и Kpyrouoii виток, где QI. Q Q ,соогвсгсгиенно
силы, действующие и; . рам 2 со сто():1Ы первого, второго и т)етьег() звеньсм мшпем сатора 18 силы тяжесги.
Из приведенных соотношений но.пчпгм (для обоих вариантов выполнения компенсатора 18, фиг. 1 и . Я
В„(..+Д/,1/л/;,/,
где . ,,.-R-: uR.,- Rm R,.
Таким образом, произв1 дя и: ,мерения р( акций связей 12 4 при отсутствии юка li /-М круговом витке и при пропускании тока. а также измерив величину проиускаемок тока, получим для В1.1чис.1ения среднего нач(М1ИЯ радиал1)Н()й составляк)цей mi дуки. И вдоль /-ГО кругового внтка В,,. All, югично, иронуская ток че|)ез К-й круго Boii виток и произ кмя необходимые изме- Р( ;1ия, определим Be,, и т. д.
Из описания работы yci роист ва с.тедует, чт ; датчики 15 17 силы исно.тьзукися в режиме малой нача,тьной статической нагрузки, так как бо.чыиая си.та тяжести рамы 2 скомпенсирована KOMneHcaTojMiM 18 силы тяжести. Благо.таря этому д()С1И1ается увеличение точности измере1П1Я ве. 1ичи1п,1 измерения реакции связей {&R, &R , ), что обуславливает достижение по.южите.чьного - повьпнепие точности измерения Вг.
Измерение радиа.тьно) составляющей магнитной индукции прои,«водится на практике, как правило, в условиях наличия бо.1Ь- 1ПОЙ вертикальной составляющей В,- (например, весьма часто на 3 4 порядка больше Вг). Неоднородность В.- вдо.ть кругового витка с током вызывает появление сил, действующих на круговые витки с токами в плоскости круг овь 1х витков. Использование гибких связей 12-14, с иомошью которых рама 2 связана с датчиками 15 17 си.пы, позволяет cyniecTBCHHo снизить в.чиянш указанных поперечных сил на точность измерения сил, нормальных к плоскости круговых вит0
5
5
ков. что такжч снижает iioi pcniHoci ь измс)е- ний и способствует достижению постав. lenHinl цели.
Благодаря испо.тьзованию в качс1твс нодвижных соединений ку.тачков с двумя або- чими иоверхностями и гибких связ1М1. |1або- таюших в )ежиме очень ма.чых де(|)орма ПИ11, иред.тагаемьп) вариант выполнения компенсатора силы тяжести ((( И Л характеризуется пренебрежимо малыми статическими силами противоде к гвия измеряемо силе F,. Последнее способствует новынкмшю точности регистрации ве.тичины реакции связей (uRi. &R. . и, таким образом, обеспечивает новын1ение точности НИИ В,.
Исцо.т1)3ование ку.тачков с одной рабочей новерхносгьн и шбких cnHicii ыя нодвеса нрсугнвоиесом но fiio. ine i и никоторон criMir fiH ()С. 1аГ)И 1 Ь ta liiU HMoc 1 ь ве. ичины l lмнcl - (. HpyioHuix сн.т (1 у,.; от г.чпв noiiopoia
0 звенье( К1)мненса М)|ы, что также смособоВуеТ УВе.ТНЧС ННЮ точное и 113МС)е /J., ДоПО.,,М I pCI НКЧ ТИО 1
по.Т) гора ((, . ж.тяется
И)СОТ . ЗМе)С.ТЯ, ПО(П- .ТЯеТ рИМе1 Я1Т CI ll Д.Я 1СС. 1еДО(а Я lal- ) iO.Te И ОТНОС И ГС. и Г)(1. 1 1 1
.х.
l llpMi/.ni ItMini C l СН11Я Qi СТ ) Д.Я р а ДН а. ,(I
сое ан.тяюше п . со.1С ржа11и-е , . ОСТОМ 1 ) Т(, ПЗ- ) ОС Ч))Ч) тока И Ч Л() руго i i x (1 д 1амет1)а, )1ые разМе Це Ь КОаКС аЛ.10 OT() ДрХс а и закре 1,е1.1 ia раме, пр крччч
ИТКН .(. ИЗО.И)ОВаН.
от друга, ог.тчиницеес.ч тем, что, i цс. ОВ)П 1ения точиост, В ycTpoi icTBo введе
ЗМерИТе. 1ЬПЬ Й рибор, КОММутаГОр, К М С 1сатор силь тяж(Ч ти и три датчика си.т,. 0 через которые 1осредством трех введеп 1 х связей рама 1одве е 1а к , с ос. рама также ш-рез KON непсат()|1 1 п.ть Т ЯжечМ, вход коммутатора измер; т е.ть 1ост т ока
ОДКЛЮЧе 1 к НСТ ОЧ ИКа ОСТ ОЯ)
тока, а коммутатора 10. к СТ . КОр- VCe (1К()ОД(0, ;аМ. к ,;Н 1 lU pC i t ОД1 ОСДП еН 1 . и, ( Q СИ.Т1)1 О .К.ТК)Ч(.ЧИ К а. Т )П М BXO.laN КОМ МуТ аТОра, к СИ ia.T)IM ()С. 1 ПОДК, И.. )p
2. cT|1( () I. 1. т ШЧИниЦгеС.Ч , что КОМ 1е 1СаТ Ор С. Т ЯЖеСТИ U.iO. а
5 трех кулачко, ку.тачок каждой ). г :я
рабоЧ М 1 1ОВе)ХНОСТ . а B:op( (И
рабочей О Н рХПОСТ (), трех . la
концах которых закреплены соответственно первый и второй кулачки пары, и трех противовесов, которые с помощью гибких связей подвешены к рабочим поверхностям вторых кулачков, рабочие поверхности первых кулачков посредством гибких связей соединены
соответственно с рамой и корпусом, при этом площадки закрепления указанных связей на раме и корпусе расположены на одинаковых угловых расстояниях друг от друга по окружностям соответствующих радиусов, коаксиальных круговым виткам.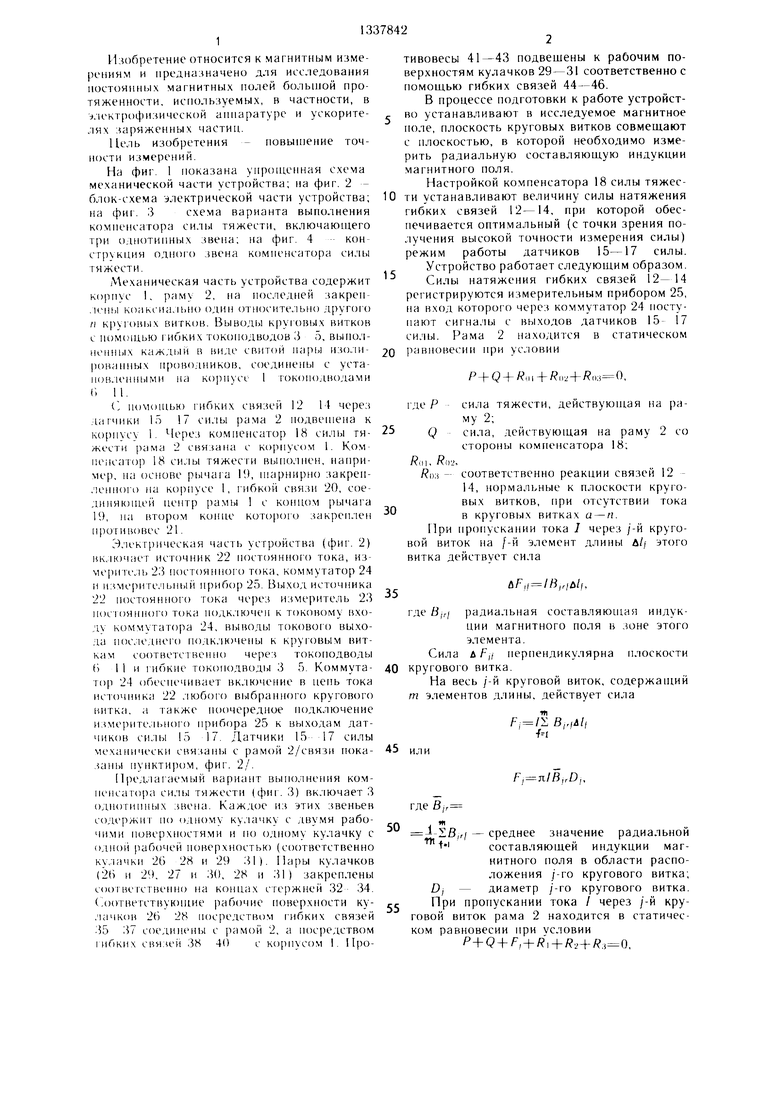
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения среднего значения радиальной составляющей индукции постоянного магнитного поля | 1984 |
|
SU1302222A1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ ЖИДКОГО МАГНЕТИКА | 2004 |
|
RU2272325C1 |
| Весы с электромагнитным уравновешиванием | 1981 |
|
SU993036A1 |
| Измерительный преобразователь постоянного тока | 1982 |
|
SU1150566A1 |
| ДАТЧИК МАГНИТНОЙ ИНДУКЦИИ | 2012 |
|
RU2490753C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СЛАБЫХ МАГНИТНЫХ ПОЛЕЙ, СОЗДАВАЕМЫХ ЭЛЕКТРИЧЕСКИМ ТОКОМ | 2011 |
|
RU2569177C2 |
| Способ В.В.Головина навивки пружин | 1980 |
|
SU933165A1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОГО АРРЕТИРОВАНИЯ АНТЕННЫ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2564636C1 |
| ПРИБОР ДЛЯ ИССЛЕДОВАНИЯ МАГНИТНОГО ПОЛЯ ПРЯМОЛИНЕЙНОГО ПРОВОДНИКА С ТОКОМ | 2000 |
|
RU2170459C1 |
| Электромагнитно-акустический преобразователь | 1988 |
|
SU1596237A1 |
Изобретение относится к магнитным измерениям. Цель изобретения - повышение точн и ти измерения. Она достигается тем, что в устройство для измерения радиальной составляющей индукции, содержащее корпус 1, раму (Р) 2, на которой коаксиально относительно друг друга размещены п круговых витков, введены измерительный прибор, коммутатор, датчики силы 15-17, токопод- воды 6-11, компенсатор 18 силы тяжести и гибкие связи для подвещивания Р 2 к корпусу 1. В описании изобретения дана конструкция компенсатора 18 силы тяжести, описаны механические и электрические связи, работа устройства и приведены математические соотношения измеряемых величи 4. Изобретение предназначено для исследования постоянных магнитных полей больщой протяженности, используемых, в частности, в электрофизической аппаратуре и ускорителях заряженных частиц. 1 з.п.ф-лы, 4 ил. (Л // оо со 00 4 ISD
л
46
фигЗ
9ил.Ч
| Способ измерения среднего значения радиальной составляющей индукции постоянного магнитного поля | 1984 |
|
SU1302222A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
