(5) СПОСОБ в. в. ГОЛОВИНА НАВИВКИ ПРУЖИН
1
Изобретение относится к технологии навивки пружин и может быть использовано в приборостроении и машиностроении на предприятиях, занимающихся изготовлением пружин.
Большинство существующих способов изготовления винтовых пружин основано на применении специальных оправок, диаметр которых зависит от диаметра пружины LI. Навивка проволоки на оправку осуществляется на специальных станках, где проволоке или оправке наряду с вращательным движением сообращается поступательное перемещение вдоль оси оправки. От этого перемещения зависит шаг пружины, т.е. расстояние между двумя соседними витками. При навивке происходит пластичeQ oe деформирование проволоки, в результате чего пружина сохраняет свою форму после снятия напряжений.
Недостатком этих способов являетс я необходимость в специальных оправках длякаждого типа пружины.
Известен способ изготовления винтовых пружин без применения оправок 2 .
Этот способ заключается в том, что образуют по меньшей мере один виток, помещают получувшуюся заготовку в зазор между двумя гладкими плитами и скатывают ее в спираль, перемещая одну плиту относительно другой в двух взаимно противоположных направлениях.
Указанный способ имеет следующие недостатки. Во-первых, прежде чем поместить заготовку между плитами, необходимо любым из известных спосо бов образовать по крайней мере один виток. Во-вторых, этот способ не позволяет изготавливать пружины с быстроменяющимися параметрами (шагом и диаметром намотки).
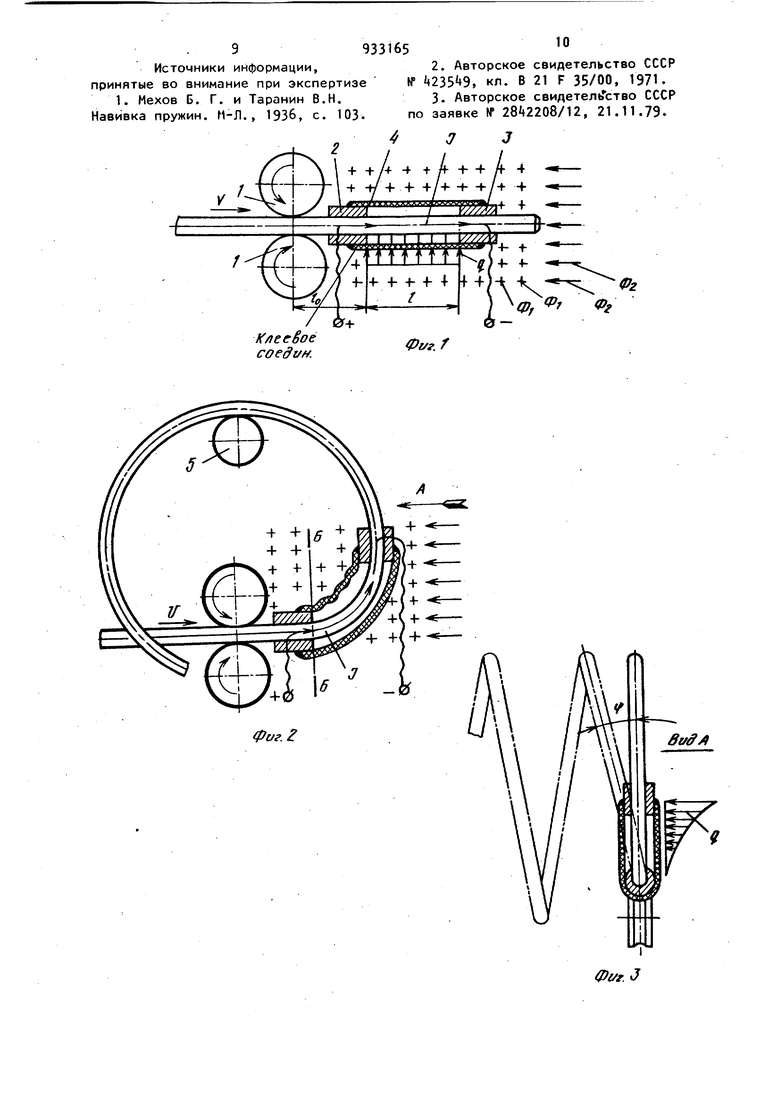
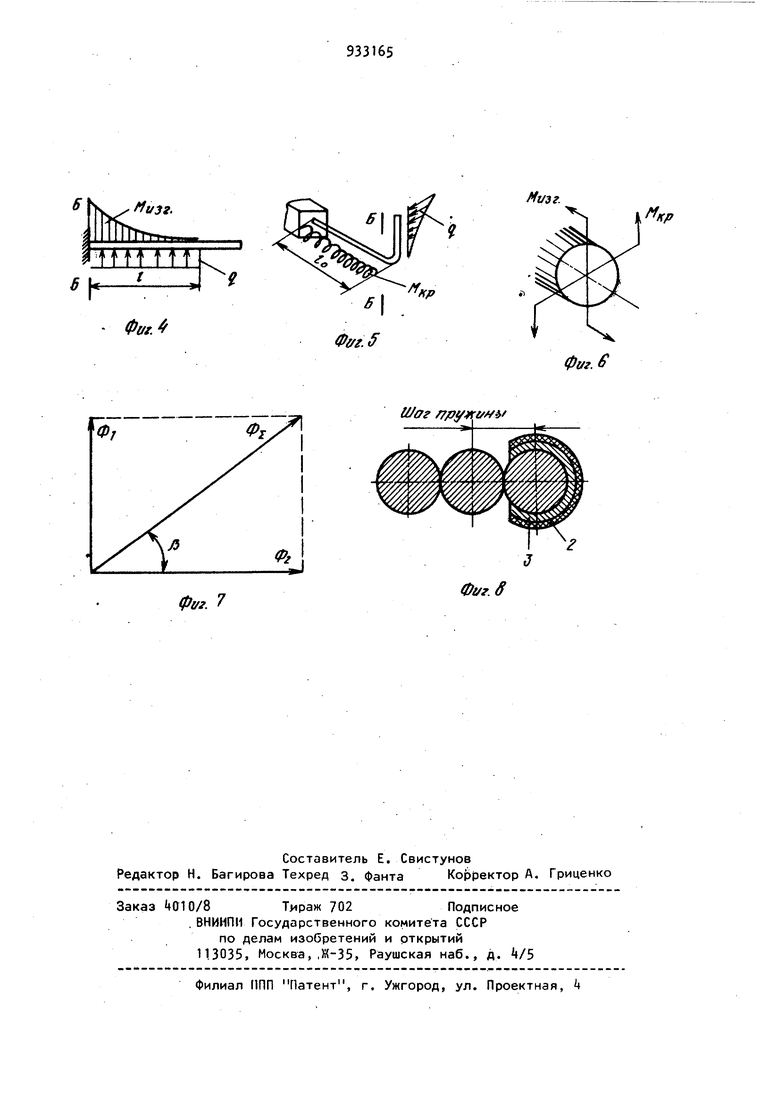
Известен способ изготовления спиральных пружин, включающий пластическое деформирование проволоки; в котором для деформирования проволоку помещают в магнитное поле перпенди улярно его силовым линиям и закрепляют один ее конец, после чего через проволоку пропускают постоянный электрический ток. Недостатком этого способа являет ся невозможность получения цилиндрических пружин. Целью изобретения является расширение технологических возможностей способа. Цель достигается тем, что в известном способе изготовления пружин, включающем пластическое деформирование проволоки путем создания вокруг проволоки магнитного поля, силовые линии которого перпендикулярны проволоке, и пропускания через проволок электрического тока, вокруг проволоки создают второе магнитное поле, си ловые линии которого параллельны про волоке, после чего проволоку перемещают вдоль силовых линий второго Mai- нитного ПОЛЯ. Индукции магнитных полей и величину тока в процессе навивки можно изменять. Деформирование проволоки можно осуществлять в жидком ферромагнитике. На фиг. 1 изображен начальный эта предлагаемого способа навивки пружин (проволока находится в недеформиррванном состоянии ; на фиг. 2 проволока в деформированном состоянии; на фиг. 3 - вид А на фиг.2; на фиг.,4- механизм возникновения изги бающего момента в деформируемой проволоке; на фиг. 5 механизм возникновения крутящего момента; на фиг.6сечение проволоки, в котором действуют максимальные изгибающие и .крутящие моменты; на фиг. 7 график сложения векторов индукции магнитных полей (обоснование возможности замены двух.магнитных полей одним магнитнь|м полем); на фиг. 8 - витки навиваемой пружины, поперечное сечение. Предлагаемый способ навивки пружин (фиг.1) осуществляется с помощью следующих конструктивных элементов; механизма 1 подачи проволоки, скользящих контактов 2 и 3 и гибкой межконтактной связи k. Механизм подачи проволоки представляет собой два ролика, прижатых к проволоке и вращающихся в противоположные стороны. За счет сил трения осуществляется равно мерное поступательное перемещение пр волоки вдоль ее оси. Скользящие контакты представляют собой отрезки трубок, внутренний диаметр которых несколько превышает диаметр проволоки. Их можно изготавливать из того же материала, что и щетки в коллекторных машинах. Контакт 2 при помощи специального зажимного устройства (на фиг. 1 не показано) жестко закрепляется. Контакт 3 за счет гибкой связи k может свободно перемещаться относительно неподвижного контакта 2, расстояние между скользящими контактами при этом сохраняется. Гибкая связь представляет собой эластичную нетокопроводящую трубку, прикрепленную к наружной поверхности скользящих контактов при помощи клеевого соединения. Позицией 5 на фиг. обозначен приемный стержень. К скользящим контактам при помощи гибких проводников подводится постоянное электрическое напряжение. Участок проволоки, находящийся между скользящими контак.тами, пронизывается магнитными полями ф и ф2. Поле ф, перпендикулярно проводнику (оно условно изображено в виде крестиков и направлено перпендику лярно плоскости фиг. в направлении от наблюдателя . После Ф направлено параллельно продольной оси проволоки. Источниками магнитных полей являются обычные электромагниты, каждый из которых состоит из подково- образного магнитопровода и обмотки возбуждения, питаемой постоянным током (на фиг. 1 электромагниты не показаны) . Процесс навивки пружины происходит следующим образом. При подаче электрического тока в обмотки возбуждения электромагнитов возникают магнитные поля, изображенные на фиг. 1 и 2. При подключении постоянного электрического напряжения к скользящим контактами на участке проволоки, находящемся между контактами, возникает электрический ток О . На каждый элемент длины д1 проводника с током, находящийся в магнитном поле, действует сила, определяемая правилом левой руки. Для поля Ф/) и тока 3 величина этой силы q будет равна: ,ле, где В - индукция магнитного поля Ф. Таким образом, участок проволоки, расположенный между скользящими контактами, можно рассматривать как балку с защемленным концом, нагру 5 женную равномерно распределенной по длине нагрузкой с (фиг.1 и 4). Как известно, величина изгибающего момен та в произвольном сечении этой балки будет равна:, . иъг--Я Се-х)Ч/Д} , где t- длина балки; X - расстояние выбранного сечения до защемленного конца балки. Таким образом, максимальный изгибающий момент будет вблизи заделки, т.е. в сечении Б-Б, и равен q-L-.Как известно, кривизна упругой линии деформированной балки различна по ее длине и пропорциональна изгибающему моменту в каждом сечении, т.е. I/ - 9 IT где 9 радиус кривизны; модуль упругости; момент инерции сечения относительно главной центральной оси, перпендикулярной к плос кости изгибающего момента. Таким образом, изгибающий момент, а значит и кривизна упругой оси балк будет пропорциональна квадрату расстояния выбранного сечения от свобод ного конца балки, т.е. максимальные деформации проволоки от изгибающего момента будут в сечении Б-Б, расположенном у неподвижно закрепленного скользящего контакта 2. В результате пластической деформации в этом се чении при непрерывной подаче проволо ки будет формироваться диаметр витка пружины (фиг.2К Если бы магнитное, поле было бы равно нулю, а величина силы ф менялась бы с течением времени (этого можно достичь, изменяя ток 3 в проволоке или индукцию магнитного поля Ф, то из прямолиней ного отрезка проволоки получилась бы плоская спиральная пружина. Mai- нитйое поле Фа предназначено для создания крутящего момента в сечении .проволоки и растягивания образующихся витков в направлении, перпендикулярном плоскости, с целью получени винтовых пружин. Как известно, при растягивании пружины силой, направленной вдоль оси этой пружины, в попe|:teчныx сечениях проволоки возникаю крутящие моменты, пропорциональные величине растягивающей силы. Естественно, справ-едливо и обратное, т.е. при создании крутящих моментов в по56 . перечных сечениях проволоки, свитой в пружину, возникает сила, растягивающая пружину, увеличивающая расстояние между двумя соседними витками, т.е. шаг пружины. Если деформации в поперечном сечении проволоки, вызванные крутящим моментом, упругие то после снятия крутящего момента пружина опять возвращается в исходное положение. Если деформации от крутящего момента пластические, то и после.снятия этого момента пружина остается растянутой. Это явление и используется для формирования шага при навивке винтовых пружин. Пока проволока прямолинейная (фиг.1), магнитное поле 02 никакого действия на нее не оказывает, хотя по ней пропускается ток. При деформации проволоки магнитным полем С)) (фиг.2), отдельные участки ее изменяют свой наклон по отношению к силовым линиям поля Ф2В пределах от О до , соответственно меняется и сила п, действующая на каждый из этих участков. Как известно, она равна: qr-DB j, ACs-iMdi. . где Ва - индукция магнитного поля ф.; лЕ - элемент длины проводника; oi угол между направлением магнитного поля Ф и элементом длины проводника. Величина этих сил показана на фиг.З Эти силы создают крутящий момент, максимальное значение которого достига ется в сечениях по длине EQ (фиг.1 и k, Таким образом, в сечении Б-Б, расположенном вблизи неподвижного скользящего контакта, возникают максимальные изгибающие и крутящие моменты. Это сечение изображено на фиг. 5. За счет пластических деформаций, возникающих в этом сечении, происходит формирование диаметра пружины и ее шага. Как известно, при растягивании пружины наряду с крутящим моментом в сечении проволоки возникает поперечный изгибающий момент, однако величина его настолько мала что им можно смело пренебречь, так как он не вызовет пластических деформаций. Навивка пружин происходит следующим образом. Существует набор вставок, каждая из которых представляет собой два скользящих контакта, соединенных гибкой связью. Вставки отличаются друг от друга внутренним диаметром скользящих контактов и длиной гибкой связи, в зависимости от диаметра проволоки и параметров будущей пружины подбирают соответствующую вставку и одевают ее на отрезок проволоки, сви сающей с подающих роликов. После это го один из контактов вставки при помощи зажимного устройства жестко зажимают в непосредственной близости от подающих роликов (как показано на фиг.1). Затем подают электрический ток к скользящим контактам и обмоткам возбуждения .электромагнитов, а также включают подачу проволоки. Для навивки плоских спиральных пружин включается только поле Ф, для навивки винтовых пружин поля Ф и ф . Как указывалось вьиие, величина, силы С|., действующей на проводник с током в магнитном поле, пропорциональна произведению индукции В на ток J. Поэтому, если уменьшить индукцию и во столько же раз увеличить ток, величина магнитоэлектрических сил не изменится, но проволока при больших токах начнет разогреваться, что облегчит процесс ее пластического деформирования. Если магнитные поля C)/f и ф/ геометрически сложить (фиг.7), то их действие будет эквивалентно результирующему полю ф,. Поэтому два электро магнита можно заменить одним электро магнитом, если повернуть его на угол Неподвижный скользящий контакт можно заменить подающими роликами, напряжение к которым можно подвести при помощи обычных щеток. Подвижный скользящий должен быть при этом соединен гибкой связью с неподвижной точкой, расположенной вбли зи подающих роликов, В качестве гибкой связи можно использовать эластич ный трос. Главное назначение гибкой связи - обеспечить свободное перемещение скользящего контакта относител но неподвижной точки при сохранении заданного расстояния между ними. Под вижный скользящий контакт можно выполнить в виде щеток, прижатых друг к другу при помощи пружинного механизма. Это обеспечит надежный контак при любом диаметре проволоки. Замена неподвижного скользящего контакта по дающими роликами позволит сократить участок to имеющий максимальный крутящий момент. Подающие ролики будут выполнять функции заделки и в непосредственной близости от них изгибающий и крутящий моменты будут максимальными. С целью уменьшения магнитных потерь пластическое деформирование проволоки можно производить не в воздушной среде, а в специальной ванне, наполненной жидким ферромагнетиком. В целях навивки пружины, шаг которых равен диаметру навиваемой проволоки (фиг.8), подвижный скользящий контакт 3 и примыкающий к нему участок гибкой связи k должны иметь срез,, обеспечивающий прижатие витков друг К другу (на фиг. изображен скользящий контакт трубчатого типа. В целях исключения влияния веса навитой пружины на изгибающие и крутящие моменты, готовая пружина должна поддерживаться приемным устройством 5 (фиг.2), которое представляет собой обычный стержень. Технико-экономическлр эффективность предлагаемого способа навивки заключается в возможности изготовления пружин всех типов как плоских спиральных, так и винтовых из трудно деформируемых материалов, причем их параметры можно свободно менять в процессе навивки, воздействуя на ток в деформируемом участке проволоки и токи в обмотках электромагнитов. Формула изобретения 1.Способ навивки пружин, включающий пластическое деформирование проволоки путем создания вокруг проволоки магнитного поля, силовые линии которого перпендикулярны проволоке, и пропускания через проволоку элек трического тока, отличающийся тем, что, с целью расширения технологических возможностей вокруг проволоки создают второе ма|- нитное поле, силовые линии которого параллельны проволоке, после чего проволоку перемещают вдоль силовых линий второго магнитного поля. 2.Способ поп.1,отличающ и и с я тем, что индукции магнитных полей и величину тока в проволоке изменяют в процессе навивки. 3.Способ по пп.1 и 2, о т л ичающийся тем, что, с целью уменьшения магнитных потерь, деформирование проволоки производят в жидком ферромагнитике.
9933165°
Источники информации,2. Авторское свидетельство СССР
принятые во внимание при экспертизе № 4235 9, кл. В 21 F 35/00, 197.
1. Мехов Б. Г. и Таранин В.Н. 3. Авторское свидетельство СССР Навивка пружин. М-Л. , 1936, с. 103. по заявке № 28 2208/12, 21.11.79.
к лее Вое coedt/ff.
4иJ
Ф1/г. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навивки и заневоливания спиральных пружин | 1979 |
|
SU860925A1 |
| Устройство для навивки и заневоливания спиральных пружин | 1979 |
|
SU860926A1 |
| Способ навивки и заневоливания спиральных пружин и устройство для его осуществления | 1982 |
|
SU1050791A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВИНТОВЫХ ЦИЛИНДРИЧЕСКИХ ПРУЖИН | 2018 |
|
RU2688028C1 |
| Способ изготовления и разделения сборочных элементов детали с гибким металлическим корпусом | 2023 |
|
RU2829178C1 |
| ПРУЖИННАЯ ГАЙКА И СПОСОБ ИЗГОТОВЛЕНИЯ ПРУЖИННЫХ ГАЕК | 2001 |
|
RU2199035C1 |
| ТЯГОВАЯ СИСТЕМА ЭЛЕКТРОМОБИЛЯ | 2018 |
|
RU2696752C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2565232C1 |
| РУКАВ, СПОСОБ И УСТРОЙСТВО ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ | 1991 |
|
RU2007654C1 |
| ВИТАЯ ОБОЛОЧКА С УСИЛЕНИЕМ И СПОСОБ ЕЁ ИЗГОТОВЛЕНИЯ | 2020 |
|
RU2756187C2 |
Мизг0tff.
Mt/зг.
Фаг. б
Шаг /7 zyvri/y /
фуг. 7
0i/f.S
