текущему значению постоянной времени фильтра, который подается на второй дифференциальный интегрирующий усили( тель 10 с сигналом управления соответствующего изменения постоянной времени. Одновременно поступает и сигнал с выхода квадратора 7, характеризующий добавку к постоянной вре10 мени фильтра, формируемую за счет обработки сигнала ошибки с выхода блока 1 вычитания.
Напряжение на выходе второго дифференциального интегрирующего усилителя 10 равно
15
и
где
Т„ + и.
20 Т и Т, напряжение на выходе квадратора;
постоянные времени управляющего воздействия и первого интегрирующего усилителя 3. После окончания интегрирования
и.
Т,(Т, + и,).
30
Изобретение относится к радиотехнике и может быть использовано для адаптивной фильтрации сигналов.
Цель изобретения повышение точности фильтрации.
На чертеже приведена структурная электрическая схема управляемого фильтра со стабилизацией динам1гческих характеристик.
Управлиемьй фильтр со стабилизацией динамических характеристик содержит первый блок 1 вычитания, первый перемножитель 2, перньп интегри- руюициЧ л силитель 3, детектор ч знака, второй блок 5 вычитания, второй инте- riinp if:ii ;i i i yciiJiirrejnj Ci, киадратор 7, bTopoi i псремножнтель 8, первый и второй дифс)срепциальные ин гегрирующие yciU iHifcuin 9 и 10 и диф(1)ерелцирующий ycH-uiriL jii. 1 1 .
Управляемы фильтр со стабилизацией Д1)1амических характеристик работает следующим образом.
Входной сигнал поступает на первый 5 J,o следовательно вход первого блока 1 в)1читания, в
котором из пего вычитается выходной
сигнал управляемого фильтра со стабШ1изацией динамических характеристик
и получаемая разность поступает на
вход 1 ервого перемножителя 2 и на
вход детектора 4 знака. На выходе
первого интегрирующего усилителя 3
формируется сглаженный сигнал. На
выходе второго интегрирующего усилите- с,
ля 6 формируется сглаженный сигнал
от детектора 4 знака, С выхода интегрнрующеГ О усилителя 6 сигнал через
квадратор 7, где он возводится в
квадрат, поступает на
тирующий вход НТОрого
го интегрирующего усилпг сля 10.
Сигнал разности с выхода первого
блока 1 вьгчп 1а1П1я поступает нп второй перомножптель 8, на второй вход
которого поступает сглаженный выходной сигнал с первого дифференпиального интсгрирую цего усилителя 9. Выходной сигнал второго перемножителя
8 поступает на инвертируюпин вход
дифференциального интегрирующего
усилителя 9, а на первый его вход
поступает продифференцированный выходной сигнал управляемого фильтра со
стабилизацией динамических характеристик.
Таким образом, на выходе дифферент;иального интегрирующего усилителя 9
формируется сигнал, пропорциональный
- и„/т,,
Постоянная времени управляемого фильтра со стабилизацией динамических характеристик равна
Т Т,/и,о .
С учетом выражения для установившегося значения и,„
и 1/(т
и,).
Таким образом, установившееся значение Тф не зависит от вариаций постоянной времени первого интегрирующего
второй неинвер- 40 усилителя 3, что обеспечивает повыше- дифференциально ние точности фильтрации и упрощает
управление по сравнению с прототипом.
45
Формула изобретения
Управляемый фильтр со стабилизацией динамических характеристик, содержащий первый блок вычитания, вход которого является входом управляемого
5Q фильтра со стабилизацией динамических характеристик, первый интегрирующий усилитель, выход которого подключен к второму входу первого блока вычитания и является выходом управляемого филь55 тра со стабилизацией динамических характеристик, последовательно соединенные детектор знака, второй блок вычитания, второй интегрирующий усилитель и квадратор, причем вход детектекущему значению постоянной времени фильтра, который подается на второй дифференциальный интегрирующий усилитель 10 с сигналом управления соответствующего изменения постоянной времени. Одновременно поступает и сигнал с выхода квадратора 7, характеризующий добавку к постоянной времени фильтра, формируемую за счет обработки сигнала ошибки с выхода блока 1 вычитания.
Напряжение на выходе второго дифференциального интегрирующего усилителя 10 равно
и
Т„ + и.
- и„/т,,
где
Т и Т, напряжение на выходе квадратора;
постоянные времени управляющего воздействия и первого интегрирующего усилителя 3. После окончания интегрирования
и.
Т,(Т, + и,).
следовательно
Постоянная времени управляемого фильтра со стабилизацией динамических характеристик равна
Т Т,/и,о .
С учетом выражения для установившегося значения и,„
и 1/(т
и,).
Формула изобретения
Управляемый фильтр со стабилизацией динамических характеристик, содержащий первый блок вычитания, вход которого является входом управляемого
фильтра со стабилизацией динамических характеристик, первый интегрирующий усилитель, выход которого подключен к второму входу первого блока вычитания и является выходом управляемого фильтра со стабилизацией динамических характеристик, последовательно соединенные детектор знака, второй блок вычитания, второй интегрирующий усилитель и квадратор, причем вход детектора знака соединен с выходом первого блока вычитания, а второй вход второго блсжа вычитания подключен к выходу второго интегрирующего усилите- ля, отличающийся тем, что, с целью повышения точночти фильтрации, в него введены первый перемножитель, включенный между выходом первого блока вычитания и входом перво- го интегрирующего усилителя, второй перемножитель, первый вход которого соединен с выходом первого блока вычитания, первый дифференциальный интегрирующий усилитель, выход и инвер- тирующий вход которого подключены к второму входу и к выходу второго
Составитель А.Осипович Редактор М.Дылын Техред В.КадарКорректор Л. Бескид
4142/53
Тираж 901Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.А/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4.
перемножителя соответственно, дифференцирующий усилитель, включенный между выходом первого интегрирующего усилителя и неинвертирующим входом первого дифференциального интегрирующего усилителя, второй дифференциальный интегрирующий усилитель, первый неинвертирующий вход которого является входом управления управляемого фильтра со стабилизацией динамических характеристик, второй неинвертирующий вход соединен с выходом квадратора, инвертирую1ций вход подключен к выходу перво1 о дифференциального интегрирующего усилителя, а выход соединен с вторым входом первого перемножителя.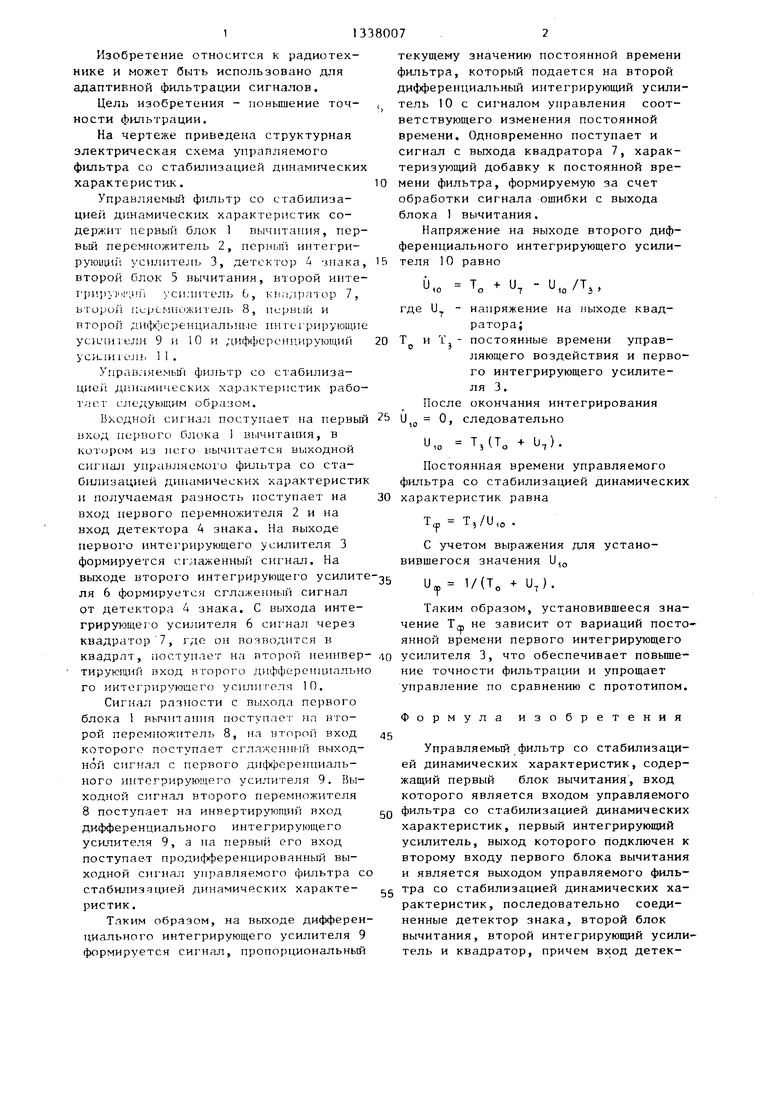
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный сглаживающий фильтр | 1984 |
|
SU1226610A1 |
| Стабилизатор амплитуды сигналов фазовой манипуляции | 1990 |
|
SU1737748A1 |
| Сглаживающий фильтр | 1983 |
|
SU1211853A1 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| ДЕМОДУЛЯТОР СИСТЕМЫ СВЯЗИ С ДВУКРАТНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2008 |
|
RU2376718C1 |
| Устройство для виброиспытаний | 1989 |
|
SU1657998A1 |
| Устройство формирования весовых коэффициентов автокомпенсаторов помех | 1983 |
|
SU1145315A1 |
| Приемник фазоманипулированных сигналов | 1985 |
|
SU1261138A1 |
| Генератор ортогональных сигналов | 1986 |
|
SU1504782A1 |
| Двухканальный измеритель флуктуаций частоты колебаний | 1980 |
|
SU896579A1 |
Изобретение относится к радиотехнике и обеспечивает повьпиение точности фильтрации.Управляемый фильтр (УФ) содержит блоки 1 и 5 вычитания, перемножители 2 и 8, интегрирующие усилители (ИУ) 3 и 6, детектор 4 знака, квадратор 7, дифференциальные интегрирующие усилители (ДИУ) 9 и 10 и дифференцир тощий усилитель 11. В блоке 1 из входного сигнала вычитается сигнал УФ. ИУ 3 формирует сглаженный сигнал разности. ИУ 6 формирует сглаженный сигнал от детектора 4 знака. На ДИУ 10 поступает сигнал с ДИУ 9, пропорциональный текущему значению постоянной времени фильтра, сигнал управления соотв. изменения постоянной времени и сигнал с квадратора 7, характеризующий добавку к постоянной времени фильтра, формируемую за счет обработки сигнала ощиб- ки с выхода блока 1. Сигнал ДРТУ 10 используется для изменения постоянной времени УФ, установивщееся значение которой не зависит от вариаций ПОСТОЯН1ЮЙ времени ИУ 3. Введены перемножители 2 и 8, ДИУ 9 и 10 и дифференцирующий усилитель II. 1 ил. ш (Л со со 00
| Управляемый фильтр | 1979 |
|
SU884082A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
