Изобретение относится к трикотажному оборудованию, конкретнее к плосковязальным 1а1иинам с минимально одной парой игольниц и последовательно разметенными каретками, стационарными регулирующими органами и оснащенным микроЭВМ.
Известно устройство для управления |.1оско)язальной машиной, содержащее стационарно расположенные секции регулирующих органов переключения замочных клиньев кареток, сдвига игольниц и отбора игл, подключенные к выходам соответствующих узлов блока про1 раммного управления, соединенного с блоком синхронизации с работой мап1ины (Патент США № 3940951, кл. D 04 В 15/78, 1976).
В известном устройстве блок программ- HOIC) унравления, выполненный в виде микро- ЭВМ, осуществляет запись в память всей нужпой для каретки информации в режиме прерываний. Из памяти эта информация передается в регулирующие органы по командам разблокировки.
Все другие возможные причины прерываний, как, например, сбои при выдаче информации, останов машины и т.п., поступают на один вход прерывания, что увеличивает частоту прерываний. Иричина прерывания определяется устройством управления. Технологически необходимые прерывания онреде:1яются и программой, но на них накладываются гюмехи, вызванные опи- сапными причинами. Для уменьшения влияния УТИХ помех требуется дополнительное обп ирное техобеспечение.
Целью изобретения является повьинепие падежпости работы.
В основу изобретения положена задача создания устройства управления плосковязальной машиной с помощью микроЭВМ, в которой было бы мипимальпым влияние импульсов помех на выходные линии микро- ЭВМ.
В предлагаемом устройстве для управления плосковязальпой ма1пииой каждая сек- пия регулирующих органов ocnaniena путевым перек,1ючателем, который размещен по ходу каретки перед своей секцией и на который воздействует каждая каретка. Каждый путевой переключатель соединен входной . 1инией с микроэвм, которая содержит программу опроса. Первая группа вьгходных линий микроЭВЛА через отдельные усили- те.1и, а вторая гругша выходнь х линий через групповые усилители соединены с секциями регулирующих органов, подключенных по матричной схеме. При этом снижение влияния помех достигается без дополнительного техобеспечепия.
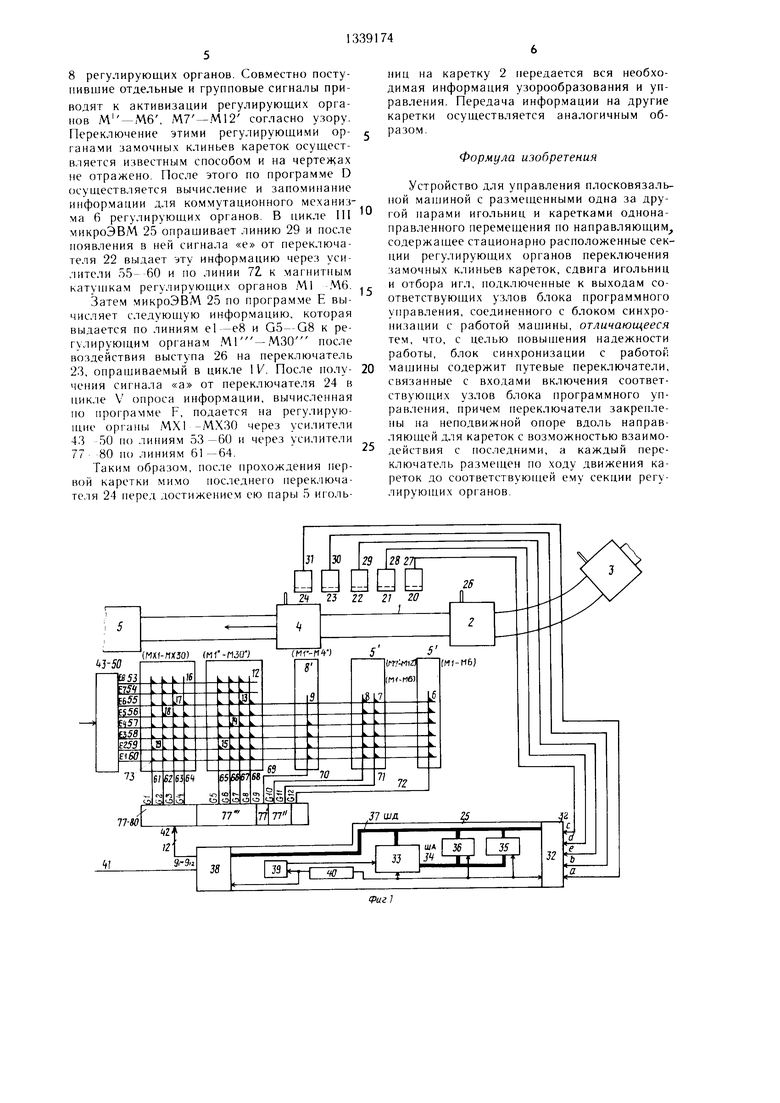
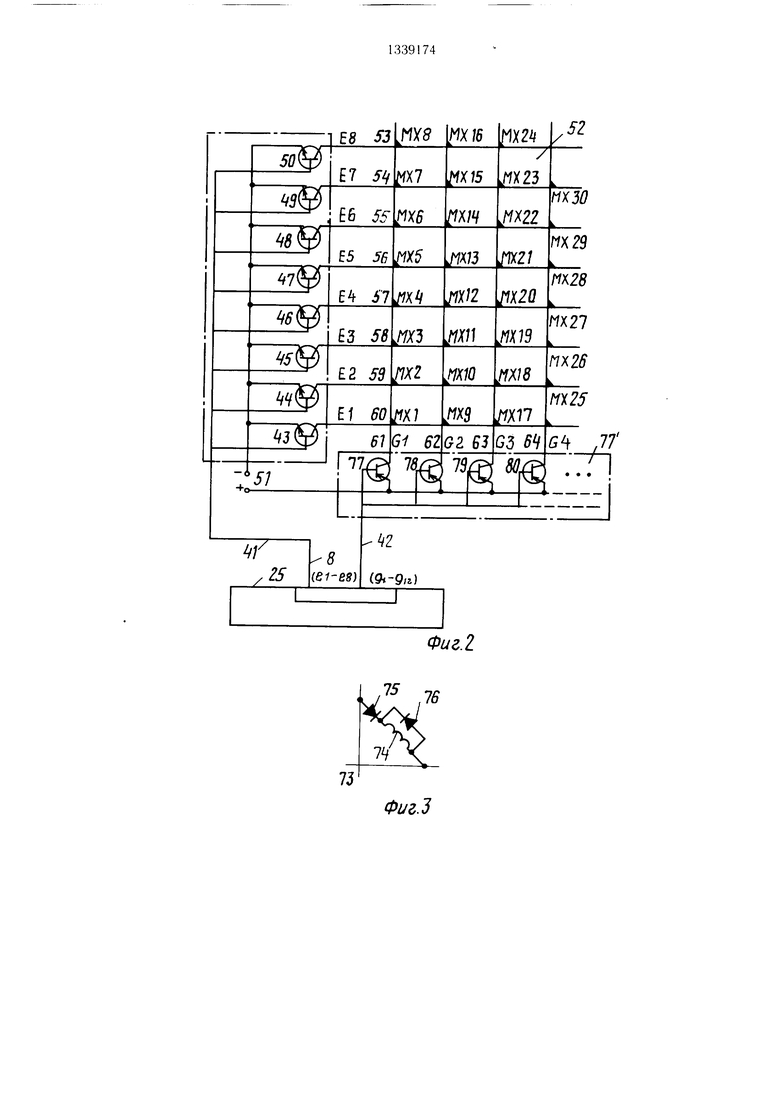
На фиг. 1 представлена блок-схема устройства жаккардовой плоскокругловязаль- ной мап1иной; на фиг. 2принципиальная схема подключения регулируюпшх ор- i aiioB; на фиг. 3 схема подключения ка0
5
0
5
0
5
0
5
0
5
тушки регулирующего органа; на фиг. 4 - блок-схема программы управления.
На закрытой направляющей 1 (фиг. 1) жаккардовой плоскокругловязальной мащи- ны размещены каретки 2-4, снабженные вязальными системами (условно показаны только три каретки). Каретки 2-4 постоянно перемещаются по закрытой направляющей 1 и взаимодействуют с двумя размещенными одна за другой парами игольниц, из которых частично изображена только пара 5. В зоне направляющей 1 между парами игольниц размещены секции регулирующих органов.
Первая секция 5 образована группой 6 регулирующих органов Ml-Мб, группой 7 регулирующих органов Ml - Мб и группой 8 регулирующих органов М7 -М12 . Группы 6-8 регулирующих органов предназначены для передачи команд узорообразо- вания и управления в каретки 2-4 для переключения замочных клиньев кареток. Конструкция регулирующих органов групп 6, 7 и 8 известна из натента DD 142899 и заявки DD WP D 04 В/213040.
Далее по ходу движения кареток размещена секция 8 с группой 9 регули- руюгцих органов Ml - М4. для сдвига игольниц. За ней расположены секции 10 и 11 для передачи информации жаккарда (к механизму переключения для отбора игл) в каретки 2-4. Секция 10 включает группы 12 -15 регулирующих органов М 1- МЗО. Секция И состоит из групп 16-19 регулирующих органов МХ1-МХЗО. Конструкция узла передачи информации жаккарда с регулирующим органом, фактурой узорообразующих пластин и барабанчиком узорообразования известна по DDWR Ь 04 В/215076.
В зоне направляющей 1 между парами игольниц расноложены путевые переключатели 20-24, например щелевые бесконтактные. В качестве этих переключателей могут быть использованы также и любые .чругие известные преобразователи приближения в э.пектрический сигнал - механические, магнитные (генераторы Холла), фотооптические и т. д. Эти переключатели 20 - 24 предназначены для создания входного сигнала при подходе каждой каретки 2 4, который подводится к микроэвм 25 для выдачи нужных сигналов управления и узорообразования. Последовательность, количество и размещение переключателей 20 -24 определяются типом мащины. На жаккардовой плоскокругловязальной машине последовательно по направлению движения кареток 2-4 размещены переключатель 20 вызова сигналов сдвига, переключатели 21 и 22 вызова сигналов коммутационного механизма, переключатели 23 и 24 вызова сигналов жаккарда Каждая каретка 2 -4 для воздействия на переключатель 20 24 имеет выступ 26. Каждый переключатель 20 - 24 по соответствующей линии 27-31 соединен с входным устройством 32 микроэвм 25.
Микро-ЭВМ 25 известной конструкции состоит из центрального процессора 33, который через адресную Н1ину 34 соединен с ПЗУ 35 с записанной в нем рабочей программой и с ОЗУ 36, содержащим программу узорообразовапия. Шина 37 данных связывает входное 32 и выходное 38 устройства, центральный процессор 33, ПЗУ 35 и ОЗУ 36. Микроэвм 25 содержит также датчик 39 тактовых импульсов и блок 40 электроснабжения. Выходное устройство 38 имеет группу из восьми выходных линий 41 для выдачи сигналов el-е8 узорообразования и/или управления и группу из двенадцати выходных линий 42 для выдачи сигналов gl-gl2 (на фиг. 1 и 2 линии 41 и 42 в группах объединены).
Каждая выходная линия 41 соединена с отдельным усилителем 43-50 (фиг. 2). В качестве отдельного усилителя испо.ть- зуется транзистор, тиристор или интегрированная ко.ммутируе.мая цепь. Предпочтительнее использовать транзисторы. Каждый отдельный усилитель 43 - 50 (фиг. 2) соединен с отрицательным полюсом источника 51 напряжения и с матричной схемой 52, которая разделена по указанным секциям. Горизонтальные линии 53-60 образуют с вертикальными линиями 61 -72 точки пересечения, служащие местом 73 подключения (фиг. 3) магнитной катушки 74 соответствующего регулирующего органа. Магнит)1ая катущка 74 включена последовательно с разделительным диодом 75 и параллельно с диодом 76. Вертикальные линии 61 72 (фиг. 2) соединены с групповыми усилителями 77. На фиг. 2 изображены групповые усилители 77-80 передачи информации жаккарда. Усилители 77-80 также могут быть выполнены в виде транзисторов, тиристоров или интегрированных коммутируемых цепей.
Устройство работает следующим образом.
После запуска программы жаккардовая плоскокругловязальная машина управляется программой А для приведения ее в определенное начальное состояние (фиг. 4). При .м первая каретка 2 должна размещаться по направлению ее движения не ред группами 6-8 регу. 1ирующпх органов и перед nepBijiM переключателем 20. Затем микроэвм 25 по програм.ме В вырабатывает информацию, которая выдается после получения первой входной информации, и вре.менно запоминает ее. Затем осуществляется цикл I опроса переключателя 20. Период опроса 20 мс, продолжительность опроса 2 мс. Если нет сигнала «с т переключателя 20, цикл I опроса повторяется, при этом никакие другие линии не опрашиваются. В промежутках между опросами
программой осуществляется контроль жаккардовой плоскокругловязальной маншны. Когда первая каретка 2 достигает переключателя 20, она воздействует на него
выступом 26 в течение не менее 20 мс, обеспечивая в течение этого промежутка наличие входного сигнала «с в линии 27, поступающего на входное устройство 32. При наличии этого сигнала во время осущест- вления цикла I опроса производится переход к программе выдачи требуемой информации сдвига. Соответствующие сигналы по выходным линиям 41 через усилители 43 - 46 и линии 57-60 поступают к магнитным катушкам группы 9 регулирующих органов.
5 После этого по программе по выходной линии 42 выдается сигнал к групповому усилителю 77. Усиленный сигнал G 9 по линии 69 поступает в магнитные катушки регулирующих органов группы 9. Оба напряжения, присутствующие одновре0 менно на местах 73 подключения, осуществляют возбуждение магнитных катущек по заданной программе, что приводит к активизации соответствующих регулирующих органов -М4
При малой продолжительности опроса переключателя 20 (а затем и остальных) исключается влияние «дребезга контактов переключателя 20, поскольку уже первый импульс от него приводит к выдаче инфорQ мании, а повторно его опрос осуществляется только в следуЮ1цем цикле. Влияние внешних источников помех ограничивается продолжительностью опроса, что сводит их к минимуму, как и влияние импульсов от переключателей 20-24, произведенных от
с вибрации . Источником ошибки .может быть и останов каретки 2 в положении, когда выстун 26 продолжает воздействовать на переключатель 20. Однако устройство зап.1ищено и от такой помехи, поскольку после окончания выдачи информации в
0 группу 9 регулирующих органов микроЭВМ 25 перестает опрашивать переключатель 20 и переходит к выполнению программы «с определения и запоминания информации коммутационного механизма, которая после получения сигнала «d по линии 28 выдается
в группы 7 и 8 регулирующих органов. Опрос линии 28 осуществляется в цикле II. Сигнал «d появляется при воздействии выступа 26 на переключатель 21. При этом мик- роЭВ. через выходное устройство 38, выQ ходную линию 41 выдает запомненные сигналы коммутационного механизма в отдельные усилители 43-48 (фиг. 2). Усиленные сигналы по линиям 55-60 поступают в магнитные катущки регулирующих органов Ml -Мб , М7 -.М12 групп 7 и 8
5 регулирующих органов коммутационного механизма. Затем микроЭВМ через групповые усилители 77 и линии 70, 71 выдает групповые сигналы G10. G11 в группы 7 и
8 регулирующих органов. Совместно поступившие отдельные и групповые сигналы приводят к активизации регулирующих органов М - Мб , М7 - М12 согласно узору. Переключение этими регулирующими органами замочных клиньев кареток осуществляется известным способом и на чертежах не отражено. После этого по программе D осуществляется вычисление и запоминание информации для коммутационного механизма б регулирующих органов. В цикле П1 микроэвм 25 опрашивает линию 29 и после появления в ней сигнала «е от переключателя 22 выдает эту информацию через усилители 55--60 и по линии 7Z к магнитным катущкам регулирующих органов Ml Мб.
Затем микроэвм 25 по программе Е вычисляет следующую информацию, которая выдается по линиям el -е8 и G5- G8 к регулирующим органам МГ -МЗО после воздействия выступа 26 на переключатель 23, опрашиваемый в цикле IV. После получения сигнала «а от переключателя 24 в цикле V опроса информации, вычисленная но программе F, подается на регулирующие органы МХ1-МХЗО через усилители 43 50 по линиям 53-60 и через усилители 77 80 по линиям 61-64.
Таким образом, после прохождения первой каретки мимо последнего переключателя 24 перед достижением ею пары 5 иг оль0
0
5
ниц на каретку 2 передается вся необходимая информация узорообразования и управления. Передача информации на другие каретки осуществляется аналогичным образом.
Формула изобретения
Устройство для управления плосковязальной машиной с размещенными одна за другой нарами игольниц и каретками однонаправленного перемещения по направляющим содержащее стационарно расположенные секции регулирующих органов переключения замочных клиньев кареток, сдвига игольниц и отбора игл, нодключенные к выходам соответствующих узлов блока программного управления, соединенного с блоком синхронизации с работой машины, отличающееся тем, что, с целью повышения надежности работы, блок синхронизации с работой машины содержит путевые переключатели, связанные с входами включения соответствующих узлов блока программного управления, причем переключатели закреплены на неподвижной опоре вдоль направляющей для кареток с возможностью взаимодействия с последними, а каждый переключатель размещен по ходу движения кареток до соответствующей ему секции регулирующих органов.
Фиг,2
76
Фиг.З
I Hem r
Программа, E
Сигнал b
J поступил
Выдать индзормацию
fiem
Выдать информацию
Bp3uHHbie demajji/
J Вязание детали, окончено
Стоп.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система телемеханики | 1988 |
|
SU1557576A1 |
| Устройство защиты и автоматики распределительной подстанции | 1988 |
|
SU1584023A1 |
| КОРАБЕЛЬНАЯ ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА СВЯЗИ | 2005 |
|
RU2297720C2 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1994 |
|
RU2103744C1 |
| Плоскофанговый автомат для вязания регулярных изделий | 1961 |
|
SU146425A1 |
| ПЕТЛЕОБРАЗУЮЩИЕ ОРГАНЫ МАШИНЫ | 1969 |
|
SU242779A1 |
| СИСТЕМА ОХРАННО-ПОЖАРНОЙ СИГНАЛИЗАЦИИ | 1996 |
|
RU2110094C1 |
| ПЛОСКОФАНГОВЫЙ АВТОМАТ | 1967 |
|
SU203131A1 |
| ПЛОСКОВЯЗАЛЬНАЯ МАШИНА | 1992 |
|
RU2031997C1 |
| Ультразвуковой терапевтический аппарат | 1989 |
|
SU1717106A1 |

Изобретение относится к трикотажному оборудованию, к плосковязальным машинам с минимально одной парой игольниц, последовательно размещенными каретками, стационарно регулирующими органа.ми и оснащенными микроЭВМ. Целью изобретения является повышение надежности работы. Устройство содержит путевые переключатели, размещенные по ходу движения кареток перед соответствующими регулирующими органами. Выдача информации на регулирующие органы осуществляется мик- роЭВМ по командам от соответствующих переключателей при воздействии на них кареток. Повышение надежности достигается за счет того, что опрос каждого переключателя производится отдельно от опроса других и один раз для одной каретки. Продолжительность опроса в цикле 2 мс, период цикла опроса 20 мс. При этом снижается влияние дребезга контактов переключателей, электрических по.мех и вибрации машины. 4 ил. iS (Л со 00 Х) 4