(21)4404684/24-24
(22)04.04.88
(46) 15.04.90. Бюл. 14
(71)Научно-производственное объединение по созданию и выпуску средств автоматизации для горных машин Авто- матгормаш
(72)Я.Л.Красин, М.Е.Левитан и В.С.Туткевич
(53) 621.398 (088.8)
(56) Авторское свидетельство СССР
№ 1462388, кл. G 08 С 19/28, 1987.
(54) СИСТЕМА ТЕЛЕМЕХАНИКИ
(57) Изобретение предназначено для обработки информации в сетях управления с линейной структурой, в которой все пульты управления соединены одной магистралью. Цель изобретения - расширение функциональных возможностей системы путем организации обмена информации между командно-исполнительными пунктами КИП как с участием центрального пункта управления, так


| название | год | авторы | номер документа |
|---|---|---|---|
| Информационно-управляющая система центрального теплового пункта жилых общественных и промышленных зданий | 1987 |
|
SU1511751A1 |
| Устройство контролируемого пункта | 1983 |
|
SU1211784A1 |
| МИКРОПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1993 |
|
RU2079876C1 |
| Устройство для сопряжения ЦВМ с накопителями на магнитной ленте | 1985 |
|
SU1288708A1 |
| Устройство для управления вводом-выводом | 1989 |
|
SU1735859A1 |
| Формирователь командного сигнала для технологических систем энергоагрегата | 1984 |
|
SU1332040A1 |
| ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА С АППАРАТНО-ПРОГРАММНОЙ РЕАЛИЗАЦИЕЙ ФУНКЦИЙ ОТКАЗОУСТОЙЧИВОСТИ И ДИНАМИЧЕСКОЙ РЕКОНФИГУРАЦИИ | 2010 |
|
RU2455681C1 |
| Устройство для циклового программного управления | 1984 |
|
SU1231488A1 |
| Устройство для программного управления | 1985 |
|
SU1327059A1 |
| Устройство для сопряжения ЭВМ с абонентом | 1990 |
|
SU1702380A1 |

Изобретение предназначено для обработки информации в сетях управления с линейной структурой, в которой все пульты управления соединены одной магистралью. Цель изобретения - расширение функциональных возможностей системы путем организации обмена информации между командно-исполнительными пунктами КИП как с участием центрального пункта управления, так и без него. Система содержит на центральном пункте управления вычислительный блок 1, формирователь частоты 2, делитель частоты 3, управляемый делитель частоты 4, три элемента И 5, 6 и 7, два элемента ИЛИ 8 и 9 и генератор опорной частоты 10, на каждом командно-исполнительном пункте вычислительный блок, дешифратор входных сигналов, дешифратор выходных сигналов, блок выдачи и блокировки сигналов прерываний, исполнительный блок, генератор частоты, датчики болесигнализации и телеизмерения и, делитель частоты, управляемый делитель частоты, формирователь частоты. Данная система позволяет образовывать группы секций КИП, работающих в групповом автоматическом режиме, а также позволяет осуществлять пооперационное ручное управление секцией КИП в пределах группы. 4 ил.
fclagj
(Л
ел ел ч
СЛ
1
фиг.1
315
и без него. Система содержит на центральном пункте управления вычислитель ный блок 1, формирователь частоты 2, делитель частоты 3, управляемый делитель частоты 4, три элемента И 5, 6
и 7, два элемента ИЛИ 8 и 9 и генератор опорной частоты 10, на каждом командно-исполнительном пункте вычислительный блок, дешифратор входных сигналов, дешифратор выходных сигналов, блок выдачи и блокировки сигна
Система телемеханики предназначена для обработки информации в сетях управления с линейной структурой, в которой все пульты управления соединены одной магистральной связью, например шахтными механизированными комплексами преимущественно в угольной промышленности.
Цель изобретения - расширение функциональных возможностей системы путем организации обмена информацией между командно-исполнительными пунктами как с участием центрального пункта управления, так и без него.
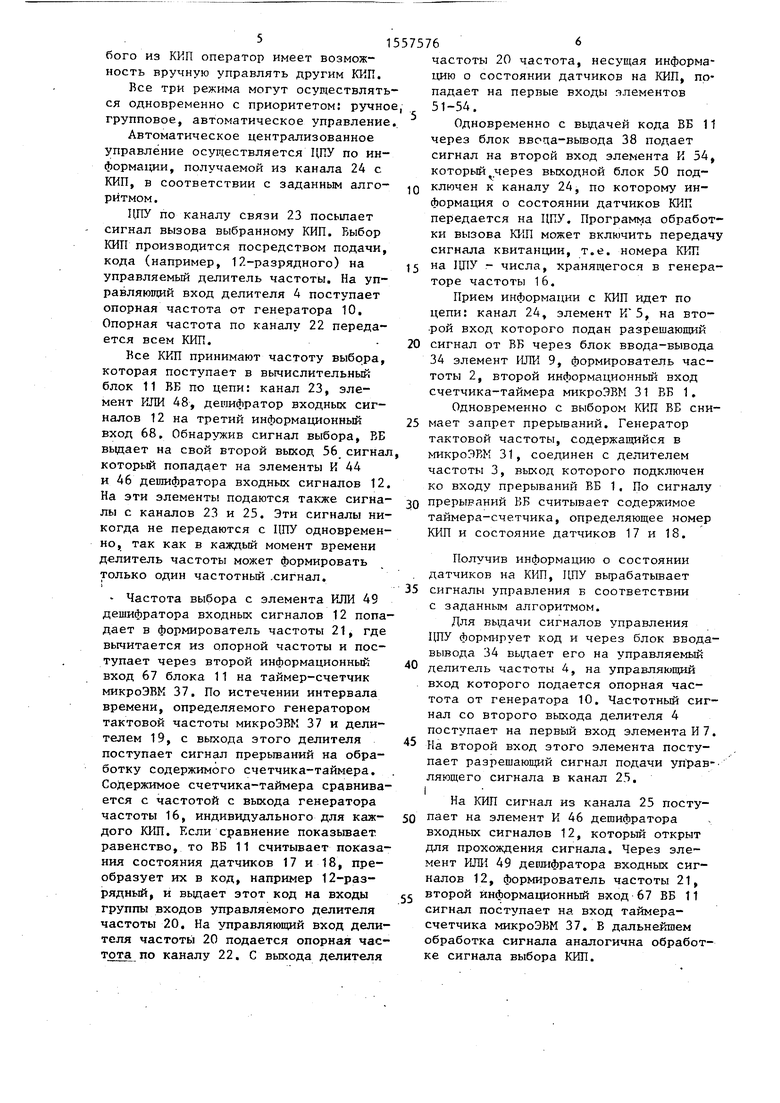
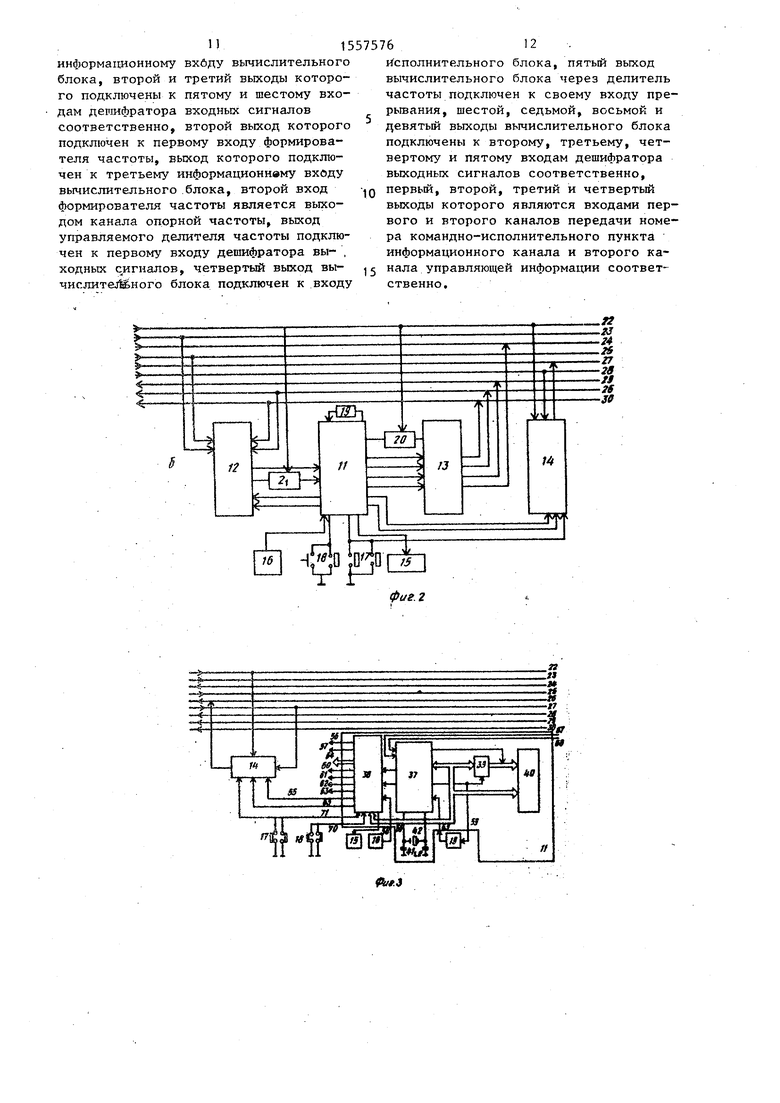
На фиг.1 представлена функциональная схема, центрального пункта управления (ЦПУ); на фиг.2 - функциональная схема командно-исполнительного пункта КИП; на фиг.З - функциональная схема вычислительного блока и блока выдачи и блокировки сигналов прерывания командно-исполнительного блока; на фиг.4 - функциональная схема дешифраторов входных и выходных сигналов.
Система телемеханики содержит на центральном пункте управления вычислительный блок 1, формирователь частоты 2, делитель частоты 3, управляв- мый делитель частоты 4, три элемента И 5-7, два элемента ИЛИ 8 и 9, генератор опорной частоты 10, на каждом командно-исполнительном пункте вычис- лительный блок 11, дешифратор входных сигналов 12, дешифратор выходных сигналов 13, блок выдачи и блокировки сигналов прерывания 14, исполнительный блок 15, генератор частоты 16, датчики телесигнализации 17, датчики телеизмерения 18, делитель частоты 19, управляемый делитель частоты 20, формирователь частоты 21, канал опорной частоты 22, канал выбора ко
,
лов прерываний, исполнительный блок, генератор частоты, датчики болесигна- лизации и телеизмерения, делитель частоты, управляемый делитель часто
ты, формирователь частоты. Данная система позволяет образовывать группы секций КИП, работающих в групповом автоматическом режиме, а также позволяет осуществлять пооперационное ручное управление секцией КИП в пределах группы. 4 ил.
5
0
5
Q
0
5
мандно-исполнительного пункта 23, информационный канал 24, первый 25 и второй 26 каналы управляющей информации, канал запроса.прерывания 27, канал блокировки прерывания 28, первый 29 и второй 30 каналы передачи номера командно-исполнительного пункта.
Вычислительный блок 1 центрального пункта управления содержит микроЭВК 31, блок памяти 32, регистр 33, блок ввода-вывода 34, конденсаторы 35 и электролит 36.
Вычислительный блок 11 командно- исполнительного пункта содержит мик- роЭВМ 37, блок ввода-вывода 38, регистр 39, блок памяти 40, конденсаторы 41 и электролит 42, 43 - блок, изображенный на фиг.З. Дешифратор входных сигналов 12 содержит четыре элемента И 44 - 47, два элемента ИЛИ 48 и 49.
Дешифратор выходных сигналов 14 содержит выходной блок 50, четыре элемента И 51-53 и 54-63 - девять выходов вычислительного блока. 64 и 65 - выходы первой и второй групп выходов вычислительного блока, .66- 68 - три информационных входов вычислительного блока, 69 - вход прерывания вычислительного блока, 70 и 71 - входы первой и второй групп входов вычислительного блока.
Система телемеханики работает следующим образом.
Система телемеханики для работы, в сети управления обеспечивает режимы управления: автоматического централизованного,- когда КИП управляются с 1ЩУ; автоматического группового, когда любой из КИП становится головным и управляет КИП; ручного, когда с любого из КИП оператор имеет возможность вручную управлять другим КШТ.
Все три режима могут осуществляться одновременно с приоритетом: ручно групповое, автоматическое управление
Автоматическое централизованное управление осуществляется ЦПУ по информации, получаемой из канала 24 с КИП, в соответствии с заданным алгоритмом.
ЦПУ по каналу связи 23 посыпает сигнал вызова выбранному КИП. Выбор КИП производится посредством подачи, кода (например, 17-разрядного) на управляемый делитель частоты. На управляющий вход делителя 4 поступает опорная частота от генератора 10. Опорная частота по каналу 22 передается всем КИП.
Нее КИП принимают частоту выбора, которая поступает в вычислительный блок 11 ВБ по цепи: канал 23, элемент ИЛИ 48, дешифратор входных сигналов 12 на третий информационный вход 68. Обнаружив сигнал выбора, ВБ выдает на свой второй выход 56 сигнал который попадает на элементы И 44 и 46 дешифратора входных сигналов 12.
На эти элементы подаются также сигна- 0 прерываний ВБ считывает содержимое
лы с каналов 23 и 25. Эти сигналы никогда не передаются с ЦПУ одновременно, так как в каждый момент времени делитель частоты может формировать только один частотный сигнал.
i
- Частота выбора с элемента ИЛИ 49 дешифратора входных сигналов 12 попадает в формирователь частоты 21, где вычитается из опорной частоты и поступает через второй информационный вход 67 блока 11 на таймер-счетчик микроЭВК 37. По истечении интервала времени, определяемого генератором тактовой частоты микроЭВМ 37 и делителем 19, с выхода этого делителя поступает сигнал прерываний на обработку содержимого счетчика-таймера. Содержимое счетчика-таймера сравнивается с частотой с выхода генератора частоты 16, индивидуального для каждого КИП. Если сравнение показывает равенство, то ВБ 11 считывает показания состояния датчиков 17 и 18, преобразует их в код, например 12-разрядный, и выдает этот код на входы группы входов управляемого делителя частоты 20. На управляющий вход делителя частоты 20 подается опорная частота, по каналу 22. С выхода делителя
таймера-счетчика, определяющее номе КИП и состояние датчиков 17 и 18.
Пoлvчив информацию о состоянии датчиков на КИП, ЦПУ вырабатывает 35 сигналы управления в соответствии с заданным алгоритмом.
Для выдачи сигналов управления ЦПУ Формирует код и через блок ввод вывода 34 выдает его на управляемый 40 делитель частоты 4, на управляющий вход которого подается опорная частота от генератора 10. Частотный си нал со второго выхода делителя 4 поступает на первый вход элемента И 45 На второй вход этого элемента посту пает разрешающий сигнал подачи упра ляющего сигнала в канал 25. I
На КИП сигнал из канала 25 посту
50 пает на элемент К 46 дешифратора входных сигналов 12, который открыт для прохождения сигнала. Через элемент ИЛИ 49 дешифратора входных сиг налов 12, формирователь частоты 21,
55 второй информационный вход 67 ВБ 11 сигнал поступает на вход таймера- счетчика микроЭВМ 37. В дальнейшем обработка сигнала аналогична обрабо ке сигнала выбора КИП.
частоты 20 частота, несущая информацию о состоянии датчиков на КИП, попадает на первые входы -элементов 51-54.
Одновременно с выдачей кода ВБ 11 через блок вво а-вывода 38 подает сигнал на второй вход элемента И 54, который,.через выходной блок 50 подключей к каналу 24, по которому информация о состоянии датчиков КИП передается на ЦПУ. Программа обработки вызова КИП может включить передачу сигнала квитанции, т.е. номера КИП
5 на ЦПУ числа, хранящегося в генераторе частоты 16.
Прием информации с КИП идет по цепи: канал 24, элемент , на второй вход которого подан разрешающий
0 сигнал от ВБ через блок ввода-вывода 34 элемент ИЛИ 9, формирователь частоты 2, второй информационный вход счетчика-таймера микроЗВМ 31 ВБ 1. Одновременно с выбором КИП ВБ сни5 мает запрет прерываний. Генератор тактовой частоты, содержащийся в микроэвм 31, соединен с делителем частоты 3, выход которого подключен ко входу прерываний ВБ 1. По сигналу
таймера-счетчика, определяющее номер КИП и состояние датчиков 17 и 18.
Пoлvчив информацию о состоянии датчиков на КИП, ЦПУ вырабатывает сигналы управления в соответствии с заданным алгоритмом.
Для выдачи сигналов управления ЦПУ Формирует код и через блок ввода- вывода 34 выдает его на управляемый делитель частоты 4, на управляющий вход которого подается опорная частота от генератора 10. Частотный сигнал со второго выхода делителя 4 поступает на первый вход элемента И 7. На второй вход этого элемента поступает разрешающий сигнал подачи управляющего сигнала в канал 25. I
На КИП сигнал из канала 25 поступает на элемент К 46 дешифратора входных сигналов 12, который открыт для прохождения сигнала. Через элемент ИЛИ 49 дешифратора входных сигналов 12, формирователь частоты 21,
второй информационный вход 67 ВБ 11 сигнал поступает на вход таймера- счетчика микроЭВМ 37. В дальнейшем обработка сигнала аналогична обработке сигнала выбора КИП.
Автоматическое групповое управление. Управление ведется группой КИП с любого КИП. Вызывающий КИП: В-КИП; вызываемый - КИП-В.
На В-КИП оператор набирает номер (или приращение номера) КИП-В. При этом считается, что все КИП, имеющие номера от В-КИП до КИП-В, входят в
Группу управляемых И ВЫХОДЯТ ИЗ Об-
ласти управления ЦПУ, Набор номера производится при помощи кнопок-датчиков 17. ВБ 11 выдает код номера Е-КИ на управляемый делитель частоты 20 и вместе с разрешающим сигналом, пос- тупающим из блока ввода-вьюода 38, сигнал, соответствующий этому коду, поступает через элемент И 51, выходной блок 50 в канал 29.
На ЦПУ сигнал, поступивший в ка- нал 29, попадает на первый вход элемента И 6, на второй вход которого в режиме опроса подается сигнал, разрешающий прохождение частоты кода, номера В-КИП. Эта частота далее через элемент КЛИ Я поступает в формирователь частоты 2 и через второй информационный вход ВБ 1 на вход счетчика- таймера микроЭВМ 31. Содержимое счетчика-таймера отображает номер в В-ККП
Передача номера КИП-В в канал 30 происходит аналогично, через элемент И 52 блока 14.
В КИП-В могут поступать два вызова: с igiy и с В-КИП, соответственно по каналам 23 и 30. Приняв обезличенный сигнал Вызов, ВБ 11 КИП-В выдает поочередно сигналы со своих второго и третьего выходов 56 и 57, открывающие элементы 44, 45. Одновременно производится измерение содержимого таймера-счетчика. Если при сигнале со второго выхода 56 содержимое таймера-счетчика не равно нулю, то это означает, что сигнал вызова пришел из канала 23, т.е. с ЦПУ. В дальнейше содержимое счетчика-таймера сравнивается с величиной генератора частоты 16 и в случае равенства определяется
факт вызова данного КИП и ЦПУ.
1
Если при выдаче сигнала КИП открывается элемент И 45, то подтверждается факт вызова КИП-В с В-КИП.
Вызывающий сигнал (частота) проходит элемент ИЛИ 49 дешифратора вход- ных сигналов 12, формирователь частоты 21 и поступает на вход таймера- счетчика микроЭВМ 37 ВБ 11. Содержимое таймера-счетчика (частота, накопленная за время KTf где Т - период тактовой частоты микроЭВМ 37 и К - коэффициент деления делителя 19) определяет номер выбираемого КИП.
Содержимое таймера-счетчика сравнивается с величиной частоты генератора 16 и в случае равенства определяется факт вызова данного КИП с другого КИП.
При подаче сигналов управления с ЦПУ и с КИП соответственно по каналам 25 и 26 каналы коммутируются элементами И 46, 47. После определения источника вызова (ЦПУ, КИП) сигналы 56 и 57 остаются только на вызываемом КИП и тем самым подготавливают прием управляющих сигналов из каналов 25 или 27.
Управляющие сигналы отрабатываются ВБ и в соответствии с их значением переводятся в выходные сигналы управления, выдаваемые через блок ввода- вывода 38 на исполнительный блок 15.
В-ККП выдает сигнал выбора КИП-В через элемент И 52 блока 14, а сигналы управления КИП-В через элемент И 53 блока 14 и оба сигнала - через выходной блок 50 соответственно в каналы 26 и 30.
Информация из каналов 26 и 30 поступает не только на КИП, но и на ЦПУ, где в обезличенном виде (какой-то КИП вызывает другой КИП) через элемент ИЛИ 8 проходит на первый информационный вход ВБ 1. При получении этого сигнала ВБ выдает сигнал через блок ввода-вывода 34 на элемент И 6 для приема информации по каналу 29. Протокол связи В-КИП и КИП-В предполагает выдачу с В-КИП его номера и номера КИП-В по каналу 29. Эта информация необходима на ЦПУ для учета зоны работы В-КИП-КИП-В. Кроме того, КИП-В передает свой номер на В-КИП для подтверждения правильности выбора.
Ручное управление. В режиме ручного управления используются каналы группового управления. Оператор, находящийся на В-КИП, с помощью кнопки датчиков 17 выбирает номер КИП-В, а затем с помощью этих же кнопок посылает команды управления на КИП-В Прохождение сигналов при ручном управлении повторяет их путь и очередность операций при групповом управлении. Разница состоит только в инициативе подачи сигналов: от оператора или от программы.
Техническое преимущество данной системы заключается в возможности образования групп секций КИП, работающих в групповом автоматическом режиме в пределах видимости оператора, а также возможность пооперационного ручного управления секцией КИП в пределах- группы.
Формула изобретения
Система телемеханики, содержащая на центральном пункте управления вычислительный блок, выходы группы выходов которого подключены к информационным входам управляемого делителя частоты, первьй выход которого является входом канала выбора командно- исполнительных пунктов, первый выход вычислительного блока является входом канала блокировки прерывания, вход прерывания вычислительного блока является выходом канала запроса прерывания, генератор опорной частоты, выход которого подключен к управляющему входу управляемого делителя частоты и является входом канала опорной частоты, на каждом командно-исполнительном пункте вычислительный блок, выходы группы выходов которого подключены к информационным входам управляемого делителя частоты, управляющий вход которого и первый вход блока выдачи и блокировки сигналов прерывания объединены и являются выходом канала опорной частоты, второй вход и первый выход блока выдачи и блокировки сигналов прерывания являются выходом канала блокировки прерывания и входом канала запроса прерывания соответственно, датчики телеизмерений, первые выводы которых подключены к входам первой группы входов вычислительного блока, датчики телесигнализации, первые выводы которых подключены к входам второй группы входов вычислительного блока и к группе,входов блока выдачи и блокировки сигналов прерывания, вторые выводы датчиков телесигнализации и телеизмерения объединены и подключены к шине нулевого потенциала, генератор частоты, выход которого подключен к первому информационному входу вычислительного блока, первый выход и выходы второй группы выходов которого подключены к третьему входу и к входам группы входов блока выдачи и блокировки сиг57576 10
налов прерывания соответственно, информационный канал, отличающаяся тем, что, с целью расширения функциональных возможностей путем организации обмена информацией между командно-исполнительными пунктами как с участием центрального пункта управ10
5
0
5
0
ления, так и без него, в систему введены на центральном пункте управления формирователь частоты, три элемента И, два элемента ИДИ и делитель частоты, второй, третий и четвертый выходы вычислительного блока подключены к первым входам первого, второго и третьего элементов И соответственно, пятый выход вычислительного блока через делитель частоты подключен к своему входу прерывания, второй вход первого элемента И является выходом информационного канала, второй выход управляемого генератора подключен к второму входу второго элемента И, выход которого является входом первого канала управляющей информации, второй вход третьего элемента К является выходом первого канала передачи номера командно-исполнительного пункта, первый и второй входы первого элемента ИЛИ являются выходами второго канала управляющей информации и второго канала передачи номера командно-исполнительного пункта соответственно, выход первого элемента ИЛИ подключен к первому информационному входу вычислительного блока, выходы первого и третьего элементов И подключены к первому и второму входам второго элемента ИЛИ, выход которого подключен к первому входу формирователя частоты, выход генератора опорной частоты подключен к второму входу формирователя частоты, выход которого подключен к второму с информационному входу вычислительного блока, на каждом командно-исполнительном пункте дешифратор входных сигналов, дешифратор выходных сигналов, делитель частоты, формирователь частоты и исполнительный блок, первый, второй, третий и четвертый входы дешифратора входных сигналов являются выходами канала выбора командно-исполнительных пунктов, первого и второго каналов управляющей информации и второго канала передачи номера командно-исполнительного пункта соот- ветственно8 первый выход дешифратора входных сигналов подключен к второму
5
0
0
5
информационному входу вычислительного блока, второй и третий выходы которого подключены к пятому и шестому входам дешифратора входных сигналов соответственно, второй выход которого подключен к первому входу формирователя частоты, выход которого подключен к третьему информационнему входу вычислительного блока, второй вход формирователя частоты является выходом канала опорной частоты, выход управляемого делителя частоты подключен к первому входу дешифратора вы- , ходных сигналов, четвертый выход вы- числител&ного блока подключен к входу
1ИГ
Исполнительного блока, пятый выход вычислительного блока через делитель частоты подключен к своему входу прерывания, шестой, седьмой, восьмой и девятый выходы вычислительного блока подключены к второму, третьему, четвертому и пятому входам дешифратора выходных сигналов соответственно,
первый, второй, третий и четвертый выходы которого являются входами первого и второго каналов передачи номера командно-исполнительного пункта информационного канала и второго ка5 нала управляющей информации соответственно.
S3
fcsjs ss
I
