Изобретение относится к автоматизации механической обработки деталей, предназначено для контроля энергии удара но линейной скорости вращения ротора-маховика кгси по скорости перемещения ползуна в винтовых прессах с дугостаторным приводом и найти применение для контроля параметров вращательного и поступательного движения.
Цель изобретения автоматизация продесса отработки последовательности ударов пресса с заранее заданным количеством ударов и уровнями энергии (скорости) на каждом из них к повьш1ение производительности зинтово- го пресса
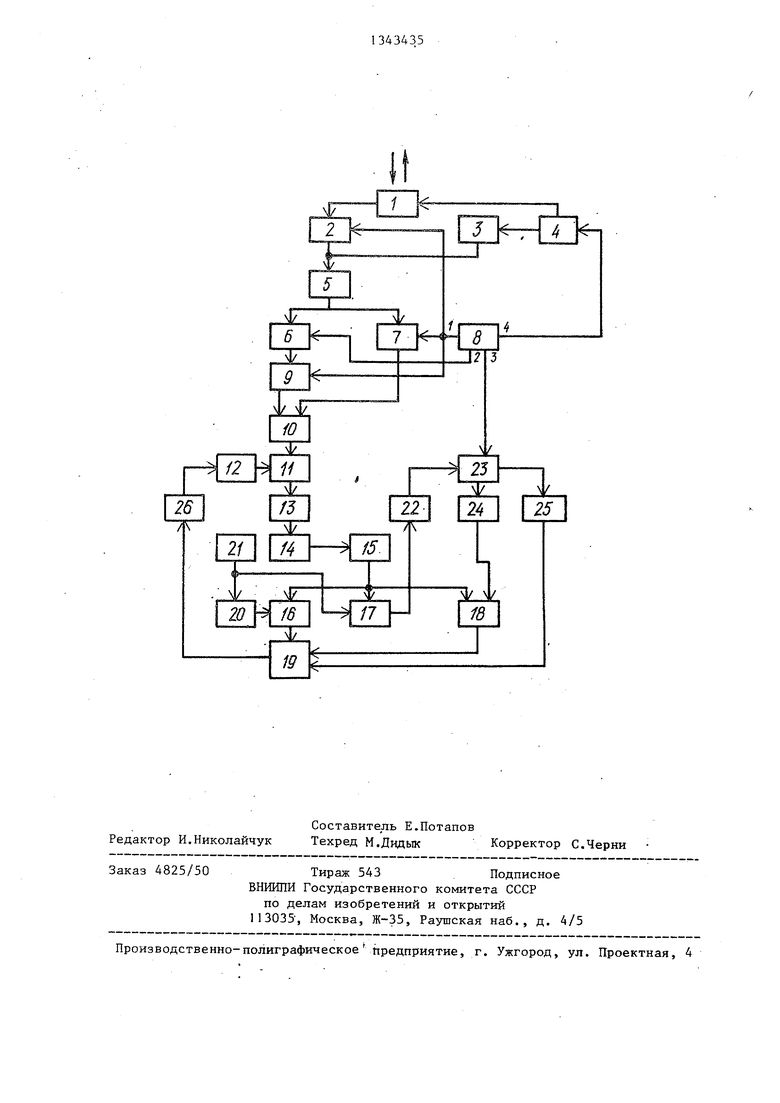
На чертел(е представлена структурная схема устройства.
Приемоизлучающий акустический датчик 1 впараллель подключен коаксиаль- ,ными кабелями к сигнальному входу приемного усршителя 2, Второй выход генератора 4 через аттенюатор 3, предназначенный для ослабления выходного напряжения генератора, и выход приемного усилителя 2, подрслгочены к входу частотного детектора 5, предназначенного для преобразования отклонения Аf частоты высокочастотного заполнения поступающих на его вход импульсов от собственной его частоты настройки в постоянное напряжение , пропорциональное величине отклонения. Выход частотного детектора 5 подключен ic соединенньш впараллель сигнальным входам ключей 6 и 7 g управляющие входы которых под- ключ€ ны соответственно к второму и первому выходам генератора тактовых импульсов (ГТИ) 8s предназначенного для формирования импульсов управления и синхронизации работы узлов и блоков устройства. Ключ 6 предназначен для передачи аналогового сигнала возбзокдения излучателя от частотного детектора 5 на вход аналогового запоминающего устройства (АЗУ) 9} щего для кратковременного запоминания этого сигнала на период до прихода сигнала, отраженного от объекта,, а управляющий вход АЗУ 9 подключен к первому выходу ГТИ 8. Ключ 7 предназначен для передачи отраженного от объекта .аналогового сигнала от частотного детектора 5 на вход дифференциального усилителя (ДУ) 10 и подключен своим выходом к прямому сигнальному входу ДУ 10, к инверсному сигнальному входу которого подключен выход АЗУ 9, ДУ 10 предназначен для
взаимного вычитания аналоговых сигналов, поступающих одновременно на его входы с ключа 7 и АЗУ 9. выделения их разности5 усиления ее или пропорционального пересчета ее в другой
аналоговый сигнал, пропорциональный кинетической энергии тела, частоте вращения, и передачи разностного сигнала на вход компаратора 11 и подключен своим выходом к первому входу
Koivmapa.Topa ) 1 , второй вход которого соединен с задатчиком 12 уровней энергии удара (скорости),, представляющим собой сменную уставку н предназначенным для создания на втором
входе компаратора опорного- сигнала, сооТветствуюв ;его заданному уровню энергии удара, Вькод компаратора П через линию 13 связи подключен к входу счетчика 14, предназначенного
для подсчета числа сигналов, пришед- ших от компаратора 11, соответствующих числу отработанных ударов пресса,. Выход счетчика 14 соединен с дешифратором 15, предназначенным для преобразования двоично-десятичного кода счетчика 14 в унитарный и передачи информации параллельно на блок I6 совпадения; блок 17 сравнения и блок I-fflH 18о Второй вход блока 16 .совпадения; предназначенного для подачи управляющего сигнала в регистр 19; подсоединен к выходу коммутатора 20} служащего для подключения к блоку 16 совпад€;ния соответствующей заданному
количеству ударов уставки задатчика 21 количества ударов. Второй вход блока 17 сравнения, предназначенного для сравнения заданного и отработанного количества ударов, соединен с
выходом задатчика 12 количества ударов, а выход блока 17 сравнения через линию 22 связи подключен к первому входу формирователя команд управ- ления (ФКУ) 23, первый выход которого через линию 24 связи подключен к второму входу блока ИЛИ 18, предназначенного для подачи управляющего сигнала Сброс на регистр 19. Второй выход ФКУ 23 через линию 25 связи подсоединен также к регистру 19, выход которого соединен линией 26 связи с задатчиком 12 уровня энергии удара. Управление ФКУ 23 осуществляется импульсамис третьего выхода ГТИ8 ,
Устройство работает следующим образом.
Электрические сигналы возбуждения датчика 1 в виде радиоимпульсов длительностью . частотой заполнения f и частотой повторения f по коаксиальному кабелю с первого выхода генератора 4 поступают в датчик 1, где преобразуются в акустические тех же параметров -(зондирующие импульсы) и излучаются в воздушную среду в направлении объекта. Одновременно с второго выхода генератора 4 через аттенюатор 3 ослабленный импульс возбуждения поступает на частотный детектор 5, входные цепи которого настроены на частоту f так, что при отсутствии отклонения Аf частоты пришедшего на его вход сигнала от его собственной частоты настройки напряжение на его выходе имеет нулевой уровень, а при наличии отклонения - отличный от нуля и линейно зависящий от величины отклонения в пределах от ((кс) ДО (,я,с ) полосы пропускания частотного детектора 5. С выхода частотного детектора 5 сигнал с уровнем, соответствующим истинному значению частоты заполнения зондирующего импульса, т.е. с учетом временной и температурной нестабильности 4f частоты схемы и, в частности, генератора и частотного детектора, поступает на ключ 6, от- . крытый на время действия зондирующего импульса управляющим сигналом с второго выхода ГТИ 8, и с его выхода подается на АЗУ 9, где запоминается на время излучения зондирующего импульса и начинает считываться с момента прихода на управляющий вход АЗУ 9 с первого выхода ГТИ 8 управляющего сигнала, соответствующего началу приема отраженного импульса. Считываемый с выхода АЗУ 9 сигнал подается на инверсный вход ДУ 10. Зондирующие импульсы, дойдя до объекта, отражаются от него и попадают вновь на датчик в .период паузы до начала следующего зондирующего импульса. В датчике 1 отраженные акустические импульсы вновь преобразуются в элект рические и подаются на приемный усилитель 2, который в это время уже открыт управляющим импульсом, поступающим на его управляющий вход с первого выхода ГТИ 8. Если при этом сигнал отразился от движущегося объекта, то на основании эффекта Допплера частота высокочастотного заполнения импульсов в соответствии с
изменением величины и направления скорости получает приращение, называемое допплеровским смещением частоты. Усиленный сигнал подается далее на частотный детектор 5, с выхода
которого снимается постоянное напряжение с уровнем, пропорциональным отклонению частоты заполнения отраженного импульса от частоты настройки частотного детектора 5. Это отклонение частоты включает в себя нестабильность частоты генератора 4, которая присутствует в зондирующем импульсе, и частотного детектора 5, а также допплеровское смещение частоты,
пропорциональное скорости или, что то же самое, кинетической энергии движущегося объекта.
С выхода частотного детектора 5 сигнал подается на сигнальный вход
ключа 7, который в это время открыт управляющим импульсом с первого выхода ГТИ, и с его выхода - на прямой вход ДУ 10. В ДУ 10 оба сигнала с выхода АЗУ и ключа 7, уровни которых
соответствуют приращениям частоты з аполнения зондирующего и отраженного импульсов, взаимно вычитаются, образуя на выходе его остающийся нескомпенсированным разностный сигнал, обусловленный только допплеровским смещением частоть, т.е. пропорциональный только величине кинетической энергии контролируемого объекта. С выхода ДУ 10 сигнал подается на
первый вход компаратора 11, на другой вход которого подается опорный сигнал с задатчика 12 уровней энергии удара. При равенстве на входах компаратора сигнала с выхода ДУ 10
и опорного с задатчика уровней энергии удара на выходе компаратора появляется сигнал, свидетельствующий о достижении ползуном пресса заданного уровня энергии, который поступает
через линию 13 связи на вход счетчика 14. Поскольку приход сигнала с компаратора соответствует окончанию удара пресса, то счетчик 14 считает число отработанных ударов и выдает
эту информацию на вход дешифратора 15 в двоично-десятичном коде. На дешифраторе 15 двоично-десятичный код числа преобразуется в унитарный, при котором порядковому номеру выходной
шины дешифратора i 5 соответствует порядковьш номер отработанного удара. Информация о числе отработанных к данному моменту ударов параллельно поступает на блок 16 совпадения, блок 17 сравнения и блок ИЛИ 18, Блок совпадения вырабатывает сигнал включения очередното разряда регистра 19 после отработки предьщутцего разряда по сигналу с дешифратора в зависимости от заданного количества ударов. Количество разрядов регистра 19 соответствует максимальному количеству ударов.
Задатчик 21 числа ударов может представлять собой делитель на резисторах, включенных в цепь питания устройства, падения напряжения с каждого из которых подаются на соответствующие входы коммутатора 20. Блок 16 совпадения обеспечивает последовательное подключение разрядов регистра 1 9 к задатчику 12 уровней энергии удара, т,е. каждуй удар пресса может быть произведен с любым заранее заданным уровнем энергии. Сброс отработанного разряда регистра по сигналу с дешифратора 15 осзтцествляется через блок ИЛИ 18, Общий сброс регистра в исходное состояние при первоначальном включении осуществляется так- же через блок ИЛИ 18 по сигналуj приходящему с первого выхода ФКУ 23 через линию 24 связи. Цикл обработки заканчивается при равенстве заданного и отработанного количества ударов Это сравнение происходит в блоке 7 сравнения, с выхода которого сигнал об окончании цикла работы передается на вход ФКУ 23 через линию 22 связи для остановки пресса. Такш- образом, вся последовательность ударов с заранее заданным любым уровнем энергии на каждом из них отрабатывается автоматически.
Формула изобретения
Устройство контроля энергии удара, содержащее приемоизлучаюш;нй акустический датчик, генератор, аттенюатор, усилитель, частотный детектор, генератор тактовых импульсов,, два ключа, аналоговое запоминающее устройство, дифференциальный усилитель, компаратор, задатчик уровней энергии удара.
15
ю
3435
формирователь команд управления, причем- приемоизлучающий датчик впарал- лель подключен к входу приемного усилителя и первому выходу генератора, управляемого с четвертого .выхода генератора тактовых импульсов, второй выход генератора через аттенюатор вместе с выходом приемного усилителя подключен к входу частотного детектора, выход которого подключен к соединенным впараллель ключам, управляющие входы которых подключены к первому и второму выходам генератора тактовых импульсов, причем выход одного ключа соединен с инверсным выходом дифференциального усилителя через аналоговое запоминающее устройство, а выход второго - непосредственно с
20 прямым входом дифференциап.ьного усилителя, выход которого соединен с первым входом компаратора, второй вход которого соединен с выходом задатчика скорости, отличаю25 щ е е с я тем, что, с целью автоматизации процесса отработки последовательности ударов пресса с заранее заданными количеством ударов и уровнями энергии на каждом из них и повы30 шения производительности винтового
пресса, оно снабжено счетчиком числа ударов, дешифратором, блоками сов падения, сравнения, ИЛИ, задатчиком числа ударов, коммутатором, регист ром, линиями связи, при этом к выходу компаратора линий связи подключен вход счетчика числа ударов, соединенного с дешифратором, выход- которого подключен впараллель к первому входу
40 блока ИЛИ, второй вход которого линией связи подключен к формирователю команд, управления и к первым входам блока совпадений и блока сравнений, вторые входы которых подключены к
45 вьпсоду задатчика числа ударов соответственно через коммутатор и непосредственно, выход блока совпадений соединен с первым входом регистра, второй в:ход которого через линию свяgQ зи подключен к выходу формирователя команд управления, третий вход - к выходу блока ИЛИ, а выход через линию связи - к входу задатчика уровней энергии удара, выход блока сравнения линией связи соединен с входом формирователя команд управления.
55
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля скорости | 1983 |
|
SU1111190A1 |
| СТАРТСТОПНАЯ СИСТЕМА СВЯЗИ | 2003 |
|
RU2252489C2 |
| Устройство для измерения времени переключения радиостанций | 1982 |
|
SU1029420A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| Система экстремального регулирования | 1985 |
|
SU1352452A1 |
| Адаптивный измерительный преобразователь | 1975 |
|
SU551507A1 |
| СТАРТСТОПНАЯ СИСТЕМА СВЯЗИ | 2006 |
|
RU2316905C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЕМКОСТИ ХИМИЧЕСКИХ ИСТОЧНИКОВ ТОКА | 2011 |
|
RU2496191C2 |
| Устройство для определения пульсового кровенаполнения | 1990 |
|
SU1754064A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1995 |
|
RU2096801C1 |
Изобретение относится к области автоматизации механической обработки деталей, предназначено для контроля энергии удара по линейной скорости вращения ротора-маховика или по скорости перемещения ползуна в винтовых прессах с дугостаторным приводом и может найти применение для контроля параметров вращательного и поступательного движений. Целью изобретения является автоматизация процесса отработки последовательности ударов пресса с заранее заданным количеством ударов и уровнями энергии на каждом из них и повьппение производительности винтового пресса. Цель достигается тем, что в устройство, содержащее приемоизлучающий датчик, тракты излучения и приема, введен блок формирования и отработки программы производства последовательности ударов пресса с заданными уровнями энергии на каждом из них. Блок состоит из задатчика скорости, задатчика количества ударов, счетчика, дешифратора, коммутатора, блоков совпадения, сравнения, ИЛИ и регистра. Таким образом, вся последовательность ударов с заранее заданным любым уровнем энергии на каждом из них отрабатывается автоматически. Это позволяет встроить пресс В автоматизированную линию или робототехнический комплекс. I ил. (Л с
Редактор И.Николайчук
Составитель Е.Потапов
Техред М.Дидык Корректор С.Черни
Заказ 4825/50
Тираж 543Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб. , д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство контроля скорости | 1983 |
|
SU1111190A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
