Автоматы для укладки плодов и других подобных продуктов или предметов в картонные поддоны с использованием в качестве силовых элементов пневматических цилиндров известны.
Известно и применение пневматических устройств для приема и передачи плодов в ячейки поддонов.
Описываемое изобретение, имея ряд особенностей, позволяет повысить эффективность работы автомата.
Так, с целью упрощения конструкции и обеспечения сохранности плодов при упаковочных операциях, приемо-укладочный пневмомеханизм выполнен поворотным на 180° с помощью зубчато ; рейки, сопряженной с парой зубчатых передач главного вала, и подъемным -с помощ1)Ю коромысла, приводимого в действие от кулачкового механизма 1 спомогательного вала.
Для надежной выдачи норожпих поддонов из кассеты и подачи их под загрузку в автомате нрименен отсекающий поворотный механизмОн выполнен в виде подающих опорных ножей, действующих от силового пневмоцилиндра, приводимого в действие от командного кулачковораспределительного вала.
С целью перемещения поддонов на один шаг, после заполнения ячейкового ряда нлодамп, предусмотрены ролики, действующие ог храпового устройства с приводом от силового ппевмоцилрп дра, сопряженного с командным валом автомата.
Особенностью в автомате является и то, что, с целью .механизации подачи заполненных плодами поддонов в опускную кассету и далее в бумажные ящики, применен захватывающий механизм в виде скобы, действующий от горизонтального силового пневмоцилиндра, и загрузочный механизм в виде рамки, укрепленной на штоке вертикального реверсивного пневмоцилиндра. снабженный поворотными опорными лапками.
управляемыми соленоидами с общим управлением цилиндром от командного вала.
Для включения автомата в действие после очередного захвата порции плодов предусмотрен вакуум-датчик, совмещенный с гофрированными резиновыми присосами, обеспечивающими включение цепп электромагнита, включающего и выключающего однооборотную муфту и командный кулачок, управляющий работой пневмоцилиндров.
Синхронность действия всех механизмов автомата осуществляется командным валом с фасонными кулачками, управляющими нневмопереключателями и золотниками силовых цилиндров.
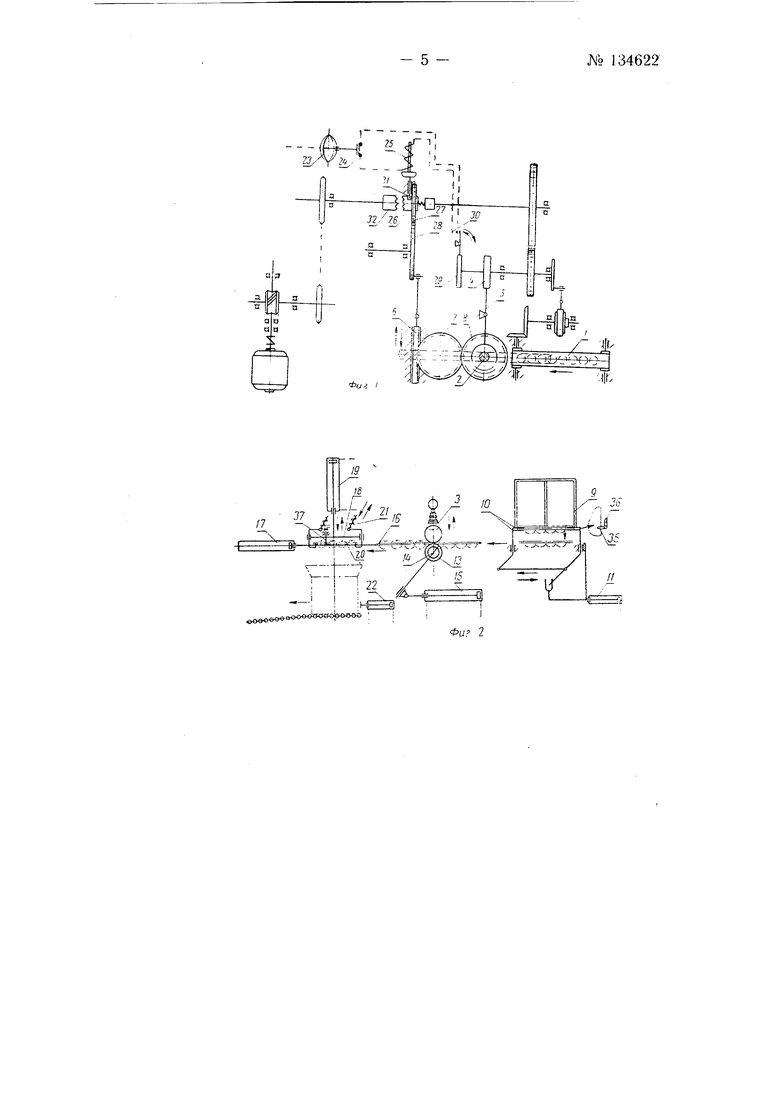
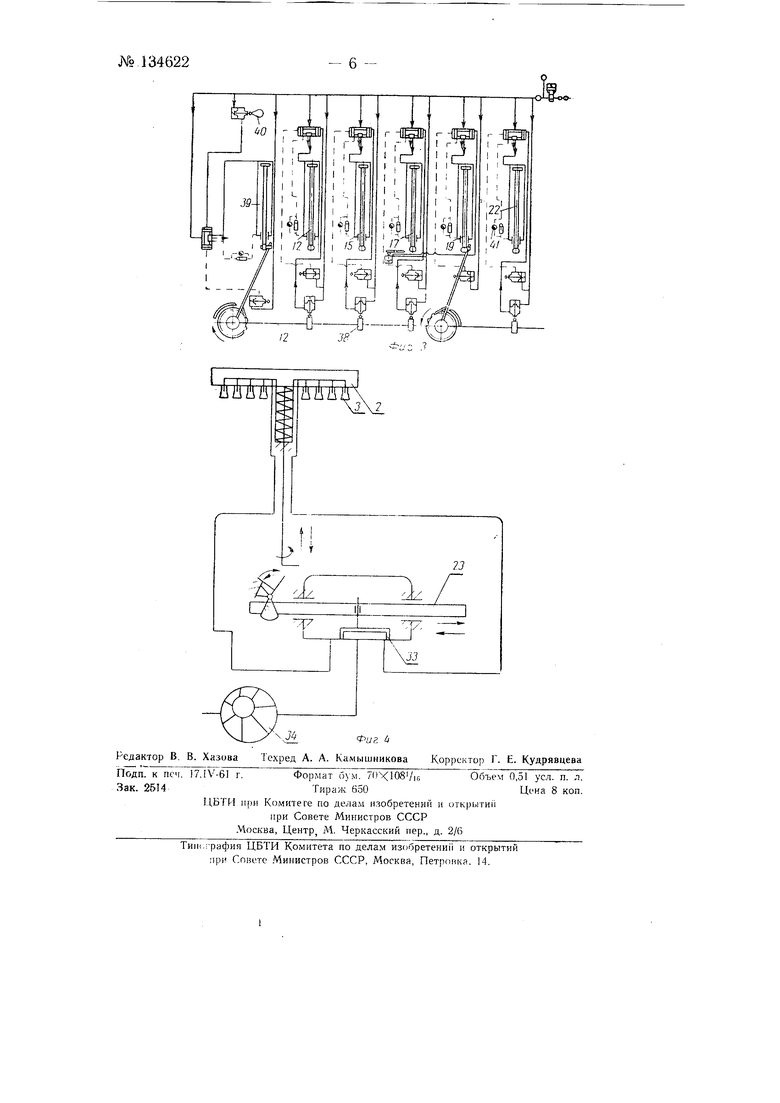
На фиг. 1 и 2 изображена кинематическая схема автомата; на фиг. 3 -схема пневмопривода к силовым цилиндрам от командного вала; на фиг. 4 - схема приемо-укладочиого нневмомеханизма.
В автомате (фиг. 1) имеется подающий плоды транспортер 1, механизм с пневматическим устройством для приема « передачи плодов ь ячейки поддонов, выполненный подъемным и поворотным на 180° в виде штанги 2 с гофрированными вакуум-присосами 3, с механизмом поднимания и опускания щтанги посредством кулачка 4 и коромысла 5, с механизмом поворота штанги с помощью зубчатой рейки 6 и пары зубчатых колес 7 и S (фиг. 1).
В автомате (фиг. 2) для выдачи порожних поддонов из кассеты ,9 и подачи их под загрузку применен отсекающий механизм, выполненный в виде подающих опорных ножей 10, действующих от силового пневмоцилиндра 11, приводимого в действие от командного ку.чачково-распределительного вала 12.
В автомате для перемещения загружаемых поддонов на один ша. после заполнения ячейкового ряда плодами предусмотрены ролики Уг, (фиг. 2), действующие от храпового устройства 14 с приводом от силового пневмоцилинд.ра /5, сопряженного с командным вало.м 12 автомата (фиг. 3).
Для механизации подачи заполненных плодами поддонов в опускную кассету и далее в бумажные ящикн применен захват 16 в виде скобы, действующий от горизонтального силового нневмоцилиндра /7, и загрузочный механизм в виде рамки 18, укрепленной на щтоке вертикального реверсивного пневмоцилиндра 19 (фиг. 2), снабженного поворотными опорными ланками 20, управляемыми соленоидами 21 с общим управлением пневмоцилиндром 22 от командного вала /2 (фиг. 3).
Для включения в дейетвие автомата после очередного захвата порции плодов применен вакуум-датчик 23, взанмодействуюпиш с контактами 24 (фиг. 1 и 4) соленоида 25, включающего и выключающего однооборотную муфту 26 с зубчатой передачей 27, 28 к рейке 6 механизма поворота щтанги 2 с гофрированными резиновыми вакуум-присосами -1 Работа автомата происходит следующим образом. Плоды (яблоки) но ленточному транспортеру / 1одаются к штанге 2 с гофрированными вакуум-присосами 3. Штанга вместе с присосами непрерывно опускается и поднимается посредством кулачка 4 и коромысла 5. Кулачок 4 вспомогательного вала обеспечивает определенную программу движения штанги: выдержку в верхнем положении, опускание, выдержку в нижнем положении и подъем.
При захвате вакуум-присосам.и 3 плодов срабатывает вакуум-датчик 23 диафрагмового типа (фиг. 1), который замыкает контакты 24. Одновременно щтанга 2 поднимается вверх и по достижении максимального подъема посредством кулачка 29 срабатывают блокирующие контакты ,(. Таким образом, электроцепь соленоида 25, управляющего однооборотной муфтой 26, замыкается и соленоид срабатывает, вытягивая фиксирующий 31 из паза муфты. Муфта через зубчатую передачу
27, 28, рейку 6. зубчатые колеса 7 и производит поворот штанги 2 на 180°. Во время поворота штанги кулачок 29 посредством блокирующих контактов 30 разрывает цепь соленоида 25 и фиксирующий палец 31 под действием пружины заскакивает в паз муфты, отсоединяя ее от закрепленной на валу кулачковой полумуфты 32.
После поворота на 180° плоды занимают место над транспортером 1 с плодами- При перемещении вниз штанга 2 перебрасывает золотник 33 (фиг. 4) вакуум-датчика в другое крайнее полон.еш1е. При этом вакуумнасос 34 соединяется с левой частью штанги 2, на.ходящейся над транспортером, а правая часть штанги отсекается от вакуум-насоса и плоды от присосов падают с незначительной высоты в соответствуюн ие впадины поддона. В одни ход одновременно может укладываться от четырех до шести плодов, в зависимости от их калибра.
Так как на поддоне укладывается определенное количество рядов плодов, применяется шаговый механизм, состоящий из двух нар роликов 13 (фиг. 2), между которыми зажимается поддон. Вер.хние ролики неприводные, нижние сндят на одном валу и посредством храпового устройства 14 приводятся в движение от пневмоцилиндра /5. Для подачи норожни.х поддонов имеется кассета 9. ПОДДОНЕ подаются но одному из кассеты следующим образом.
Вея стойка поддонов лежит на четырех ножах 35. На одно11 оси с ножами 35 сидят еще четыре ножа 36, повернутые на 90° но отношению к первым и расположенные выше на толшинч- поддона. Шток пневмоцнлиндра //, получив команду, начинает перемещаться вперед и поворачивает посредством рычажного привода на 90°. При этом верхние ножи 36 входят в щель между нижним поддоном и остальной стопкой, отсекая нижний поддон при выходе нижних ножей 55 из-под него.
Поддон падает на направляющие. Этим же пневмоцилиндром ноддон подается под загрузку первого ряда плодами. Наполненный плодами поддон посредством специального захвата 16 (фиг- 2), управляемого гщевмоцилиндром /7, затягивается в устройство для опускания наполненного поддона в ящик. Это устройство состоит из рамки 18, которая крепится к щтоку пневмоцилиндра 19. К рамке 18 с двух сторон крепятся также по шесть поворотных лапок 20, управляемых двумя соленоидами 21. В нормальном положении лапка образует как бы две направляюндие, на которые ложится поддон. Пневмоиилнндр 19 служит для опускания рамки 18 вместе с поддоном в ящик.
После того, как опускаемый поддон садится на ниже.пежащий ноддон или дно короба, рамка вместе с лапками продолжает движение вниз. При этом щуп электроконтакта 37 наталкивается на поддон и замыкает непь соленоидов 2, которые поворачивают лапки на 90° и через трехходовой клапан, управляющий золотником пневмоцилиндра, производят его реверсирование. Рамка поднимается и повернутые лапки входят в зазор между ящиком и поддоном. Находясь вверху, лапки занимают исходное положение. Наполненный ящик при помощи пневмоцилнндра 22 выталкивается по рольгангу из автомата.
Управление всеми пневмоцилиндрами происходит от ко. вала 12 с набором кулачков 38, которые управляют трехходовыми клапанами, связанными с золотниками пневмоцилиндров. Командный вал 12 поворачивается на определенный угол посредством храповика и собачки. Привод вала осуществляется от пневмоцилиндра 39, включаемого от кулачка 40, сидящего на однооборотной муфте 26. При провороте муфты кулачок включает трехходовой клапан, а тот, в свою очередь, через золотник включает пневмоцилиндр 39. Командный вал 2 поворачивается на определенный угол, производя включение с,оответств -ющих
№ 134622
№ 134622- 4
пневмоцилиндров. Скорость рабочих ходов пневмоцилпндрок регу.лирустся дросселями 41Применение пневмоприводов дает возможность легко и быстро itреналадить автомат на укладку плодов любого калибра.
Предмет изобретения
1.Автомат для укладки илодов в ячейковые картонные поддоны и занолненны.х плодами поддонов в раскладные бумажные япдики-короба, содержащий в себе подающий плоды транспортер и механизм с пневматическим устройством для приема и передачи плодов в ячейки поддонов, отл имеющийся тем, что, с целью упрощения конструкции и обеспечения сохранности плодов при упаковочных операциях, приемо-укладочный пневмомеханизм выполнен поворотным на 180° с помощью зубчатой рейки, сопряженной с парой зубчатых передач главного вала, и подъемным - с помощью коромысла, приводимого в действие от кулачкового механизма вспомогататьного вала.
2.Автомат по п. 1, отличающийся тем, что, с целью надежности выдачи порожних поддонов из кассеты и подачи их под загрузку, применен поворотный отсекающий механизм, выполненный в виде подающих опорпых ножей, действующих от силового пневмоцилиндра, приводимого в действие от командного кулачково-распределительпого вала.
3.Автомат по пп. 1-2. отличающийея тем, что, с целью перемещения загружаемых по.здонов на один шаг, носле заполнения ячейкового ряда плодами, предусмотрены ролики, действующие от храпового устройства с приводом от силового пневмоцилиндра, сопряженного с командным валом автомата.
4.Автомат по пп. 1-3, отличающийся тем, что, с целью механизации подачи заполненных плодами поддонов в опускную кассету и далее в бумажные ящики, применен захватывающий механизм в виде скобы, действующпй от горизонтального силового пневмоцилиндра, и загрузочный механизм в виде рамки, укрепленной на щтоке вертикального реверсивного пневмоцилиндра, снабженный поворотными опорными лапками, управляемыми соленоидами с обии-гм управлением цилиндром от командного вала,
5.Автомат по пп. I-4, отличающийся тем, что, с целью включения его в действие, после очередного захвата порции плодов, применен вакуум-датчик, совмещенный с гофрированными резиновыми присосами, обеспечивающими включение цепи электромагнита, включающего и выключающего однооборотную муфту и командный кулачок, управляюиитй работой пневмоцилиндров,
6- Автоматическое устройство по ни, 1-5, отличающееся тем, что, с целью обеспечения синхроипости действия всех механизмов автомата, применен командный вал с фасонными кулачками, управляющими пневмопереключателями и золотниками силовых цилиндров.
u I
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоручьевая машина для калибровки плодов по весу | 1961 |
|
SU144333A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
/о
,u
22
Фи 2
ЙТГЙТГХ
ИИЙЖ
.
2J
