Изобретение относится к устройствам для автоматического регулирования скорости поперечной подачи шлифовального круга желобошлифовальных станков по заданной программе в функции припуска с корректировкой по скорости действительной подачи.
Предлагаемое устройство содержит приводной двигатель постоянного тока с независимым возбуждением, индукционный датчик для контроля размеров обрабатываемого изделия и блоки программирования и корректировки.
Отличительными особенностями предлагаемого устройства являются включение якоря приводного двигателя в катодную цепь тиратрона, работающего в импульсном режиме, и присоединение управляющей сетки этого тиратрона к отрицательному цолюсу якоря двигателя через цепочку сопротивлений, на одно из которых подается задающее напряжение, а на другое-напряжение корректировки, формируемое блоком программирования.
Такое выполнение устройства обеспечивает повышение точности обработки изделий, улучшение качества обрабатываемой поверхности и увеличение производительности станка.
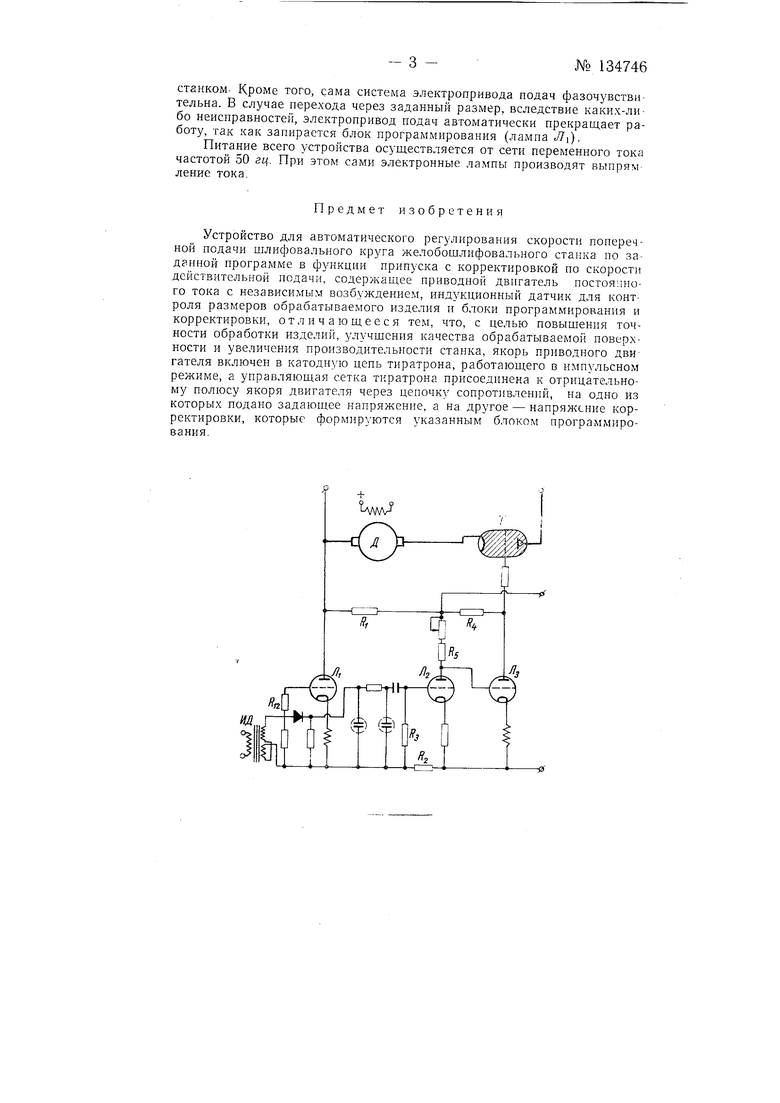
На чертеже показана принципиальная электрическая схема предлагаемого устройства.
Напряжение с трансформаторного индукционного датчика МД, включенного по дифференциальной схеме, поступает на вход блоков программирования и корректировки. Блок программирования выполнен на электронной лампе Л,, а блок корректировки на лампах Л и Л-. Эти два блока управляют тиратроном Г, регулируя поступление энергии
№ 134746- 2 в якорь электродвигателя Д. Тиратрон работает в импульсном режиме по однополупериодной схеме выпрямления с жесткой обратной отрицательной связью по напряжению на якоре двигателя, напоминающей схему катодного повторителя. Это обеспечивает возможность получения низких устойчивых скоростей, и улучшает динамические свойства системы. Управление тиратроном происходит по принципу ключа «открытзакрыт. Если скорость подачи мала - тиратрон «открыт, ток проходит через якорь двигателя и скорость двигателя растет. Если скорость подачи велика - тиратрон «закрыт и скорость двигателя падает. Этот процесс повторяется с большой частотой, так что скорость подачи остается примерно на заданном уровне.
Напряжение индукционного датчика, прямо пропорциональное снимаемому (припуску), преобразуется лампой Л, представляюшей собой каскад ограничения напряжения в задающее напряжение, изменяющееся по трапсцспдальному закону в функции припуска. Подбором параметров форма задающего напряжения приближается к принятому закону регулирования скорости действительной подачи.
Задающее напряжение выделяется на сопротивлении Ri, представляющем собой анодную нагрузку лампы Л, и на сопротивлении Rz блока корректировки.
Задающее напряжение с сопротивления поступает в сеточную цепь тиратрона Т в фазе с анодным напряжением тиратрона. В результате наличия жесткой отрицательной обратной связи по напряжению на якоре двигателя Д, скорость последнего регулируется примерно по заданному закону. Погрешность здесь возникает из-за того, что обратная связь осуществляется по напряжению, а не но скорости двигателя.
Таким образом, блок программирования служит для получения задающих напряжений, изменяющихся но принятому закону регулирования скорости действительной подачи в функции припуска, и для грубого регулирования скорости электропривода в функции припуска.
Для более точного регулирования служит блок корректировки на лампах //а и Лд. На вход этого блока на лампу Л подается в противофазе задающее напряжение 6 |, , снимаемое с сопротивления Rz, и напряжение Rj, пропорциональное скорости действительной подачи, вы деляющееся на сопротивлении R после выпрямления, сглаживания и дифференцирования напряжения индукционного датчика.
В результате на сетке лампы Л- действует напряжение ошибки IJ 11 „- и .. Это напряжение усиливается двухкаскадным усилителем на лампах Лг и Лз и выделяется на сопротивлении 4, представляющем собой анодную нагрузку лампы Лз, поступая в сеточную цепь тиратрона.
Таким образом, в сеточной цепи тиратрона появляется сигнал корректировки, воздействующий на скорость электродвигателя подач, приводя ошибку между заданной и действительной скоростями подачи к нулю.
В схеме предусмотрено переменное сопротивление RZ-«настройка нуля. Регулировкой этого сопротивления производится балансировка токов «покоя электронных ламп Л и Лз. При выбранной схеме сигнал корректировки может действовать в направлении как увеличения, так и уменьшения скорости электропривода.
Для фиксации окончания отработки при получении заданного размера применен нуль-индикатор, реагирующий на изменение фазы напряжения, снимаемого с индукционного датчика. В схему нуль-индикатора, обеспечивающую необходимую точность, входят усилитель на полупроводниковом триоде и реле, воздействующее на схему управления
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный игнитронный прерыватель | 1956 |
|
SU108152A2 |
| Устройство для управления газоразрядными вентилями преобразователя трехфазного тока в чередующиеся по направлению импульсы электрического тока | 1955 |
|
SU104668A1 |
| Самовозбуждающийся ламповый генератор | 1941 |
|
SU62273A1 |
| Устройство для сеточной защиты от перегрузки выпрямительной установки | 1959 |
|
SU130586A1 |
| Устройство для автоматического управления копировальным станком | 1948 |
|
SU83585A1 |
| Универсальный игнитронный прерыватель | 1950 |
|
SU94552A1 |
| Дифференциальный микросекундомер | 1947 |
|
SU74826A1 |
| Тиратронное устройство для автоматического управления асинхронным двигателем | 1960 |
|
SU139412A1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА | 1948 |
|
SU93584A1 |
| Устройство для контроля и сортировки изделий | 1948 |
|
SU80270A1 |
