В известных устройствах автоматического управления копировальными станками часто применяются индуктивные датчики, напряжение которых подается на выпрямитель в сеточной цепи электронной лампы, управляющей возбуждением генератора электропривода. Регулирование привода подач в них осуществляется по прямолинейному закону, вследствие чего результирующая скорость подачи колеблется в пределах 40% от максимальной по условиям резания. Это снижает производственные показатели станка: снижается производительность и точность и ухудшается чистота обрабатываемой поверхности.
В предложенном устройстве постоянство результирующей скорости подачи обеспечивается путем изменения обеих составляющих результирующей скорости подачи (поперечной и продольной) соответственно по закону синуса и косинуса в функции отклонения якоря индуктивного датчика.
В результате постоянства результирующей скорости подачи повышается производительность станка, получается большая точность и чистота обрабатываемой поверхности и улучшаются условия работы режущего инструмента.
Для осуществления регулирования скорости подач по законам, близким к синусоидальному и косинусоидальному, напряжение индуктивного датчика подведено к питающему сеточные цепи усилителя выпрямителю, в цепь анодов которого включен источник постоянного напряжения и омические сопротивления.
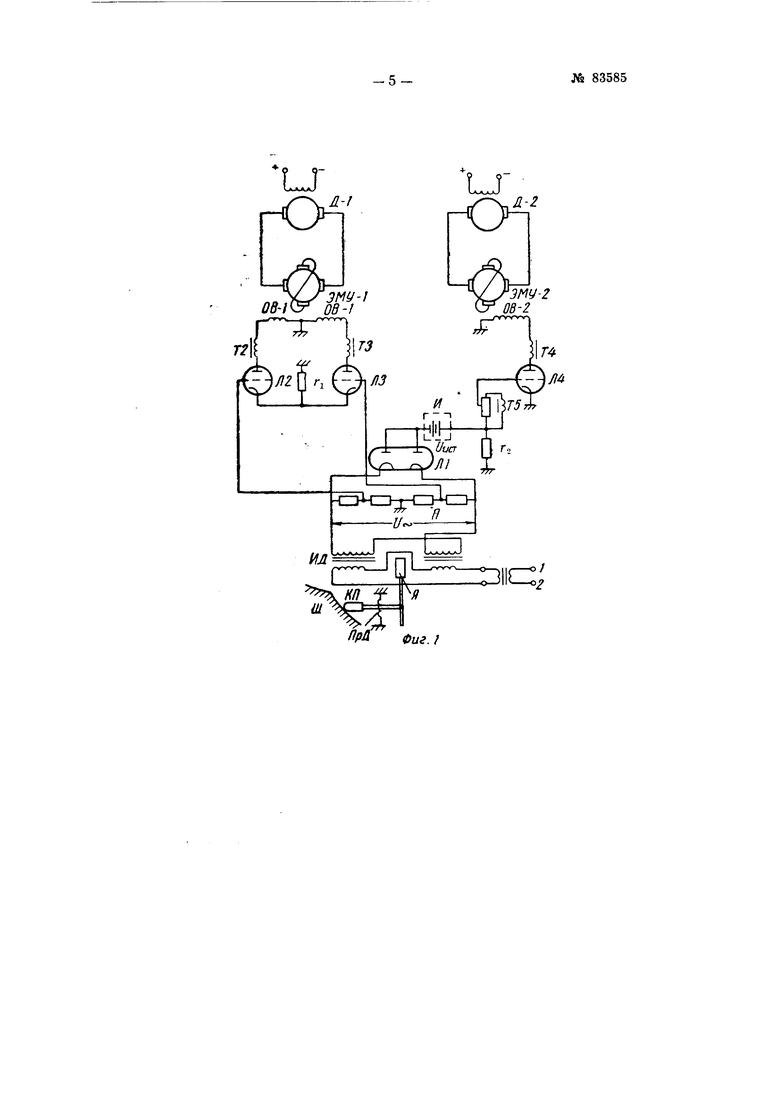
На фиг. 1 представлена принципиальная схема описываемого устройства; на фиг. 2 и 3 - кривые тока и напряжения.
Копировальный палец КП, скользящий по поверхности шаблона Ш, связан с якорем Я индуктивного датчика ИД.
№ 83585- 2 -
Индуктивный датчик состоит из двух сердечников, на каждом из которых находится первичная и вторичная обмотки. Первичные обмотки соединены последовательно и питаются от сети переменного тока (зажимы /-2). Магнитные цепи сердечников замыкаются подвижным якорем Я, который перемещается под действием копировального пальца КП и пружины датчика ПрД, изменяя воздушные зазоры между якорем и сердечником. При этом индуктивности первичных обмоток датчика изменяются обратнопропорционально величинам воздушных зазоров, в результате чего во вторичных обамотках наводятся различные но величине напряжения. При отсутствии рассогласования между положением копировального пальца и шаблона, копировальный палец, нагруженный пружиной ПрД, касается шаблона, и якорь индуктивного датчика находится в среднем положении, при котором в каждой из вторичных обмоток наводятся одинаковые напряжения, и результируюш.е й ГГГряжение на выходе датчика, вследствие встречного соединения.его вторичных обмоток, равно нулю.
При рассогласовании между положением копировального пальца и шаблонамогут быть два случая:
1.Шаблдн, оказывая давление на копировальный палец, перемещает его и выводит якорь индуктивного датчика из среднего положения.
2.Шаблон не давит на копировальный палец, и последний нод действием пружины ПрД отклоняет якорь индуктивного датчика в другую сторону.
При отклонении якоря идуктивного датчика от среднего положения, на выходе появляется напряжение U, пропорциональное отклонению якоря в пределах хода последнего. При больших отклонениях копировального пальца якорь Я перестает перемещаться, оставаясь максимально смещенным, и напряжение на выходе датчика остается постоянным и равным максимальному значению.
При изменении направления перемещения якоря напряжение на выходе датчика меняет фазу на 180°. Напряжение на выходе в пределах хода якоря Я пропорционально перемещению последнего.
Напряжение на выходе индуктивного датчика подается на потенциометр П.
Потенциометр П служит распределителем выходного напряжения и при подаче его на вход усилительных каскадов продольной и поперечной подач. Выводы с потенциометра П, предназначенные для усилителя продольной подачи, подключены к катодам выпрямительной лампы Л. Средняя точка потенциометра заземлена, что позволяет присоединять вторые концы входов усилителей к катодам ламп Л и Л через сопротивление смещения Г).
При смещении якоря из нейтрального положения на выходе потенциометра Я появляется напряжение, величина и фаза которого определяются величиной и направлением смещения якоря. Так как аноды ламп Л2 и Лз усилителя поперечной подачи питаются переменным током, то, в зависимости от фазы напряжения на потенциометре /7 анодный ток одной из этих ламп увеличится, а другой - уменьшится. В результате на зажимах усилителя ЭМУ-1 появится напряжение соответствующей полярности. Напряжение, подаваемое с потенциометра П на вход каскада продольной подачи, после выпрямления лампой J7i вызывает падение напряжения того же знака на сопротивление Гг. Это напряжение является отрицательным но отнощению к катоду лампы Л усилителя продольной подачи. Таким образом, отклонение якоря датчика в любом направлении вызывает уменьшение анодного тока лампы с/7.1, а, следовательно, и напряжения на генераторе ЭМУ-2.
К зажимам генераторов ЭМУ- и 5Л1У-2 подключены приводные двигатели Д-1 и Д-2 постоянного тока с независимым возбуждением.
Таким образом, осуществляется блокированное управление двумя взаимно-периендикулярными подачами, одна из которых в зависимости от перемещения якоря индуктивного датчика изменяет величину и направление, а вторая - только величину.
Желательно, чтобы вблизи нулевого положения якоря датчика изменение скорости двигателя продольной подачи в зависимости от отклонения якоря происходило менее резко, чем при большом отклонении якоря.
В идеальном случае скорость двигателя продольной подачи должна быть пропорциональна косинусу величины отклонения якоря датчика.
Для того, чтобы при обработке наклонных поверхностей результируюш,ая скорость подачи (яв.тяющаяся с ммой скоростей продольной и поперечной подач) поддерживалась постоянной и была направлена по касательной к обрабатываемому изделию, в схему введен источник постоянного тока Я, который позволяет получить косинусоидальный закон регулирования подач.
Источник И включен отрицательным полюсом к анодам выпрямительной лампы Л,,.
При таком включении ток через выпрямитель возникает не при и О, а только тогда, когда напряжение U, подводимое к выпрямителю, достигает величины напряжения L,, источника. Среднее значение тока, получаемого от выпрямителя, изменяется не прямо пропорционально изменению напряжения U, а следуюп им образом:
до тех пор, пока амплитуда переменного напряжения не достигнет величины напряжения источника, этот ток будет равен нулю;
начиная с момента, когда амплитуда переменного напряжения U станет больше напряжения источника f/,, и при дальнейшем увеличении амилитуды среднее значение тока будет изменяться вначале медленно, а затем быстрее.
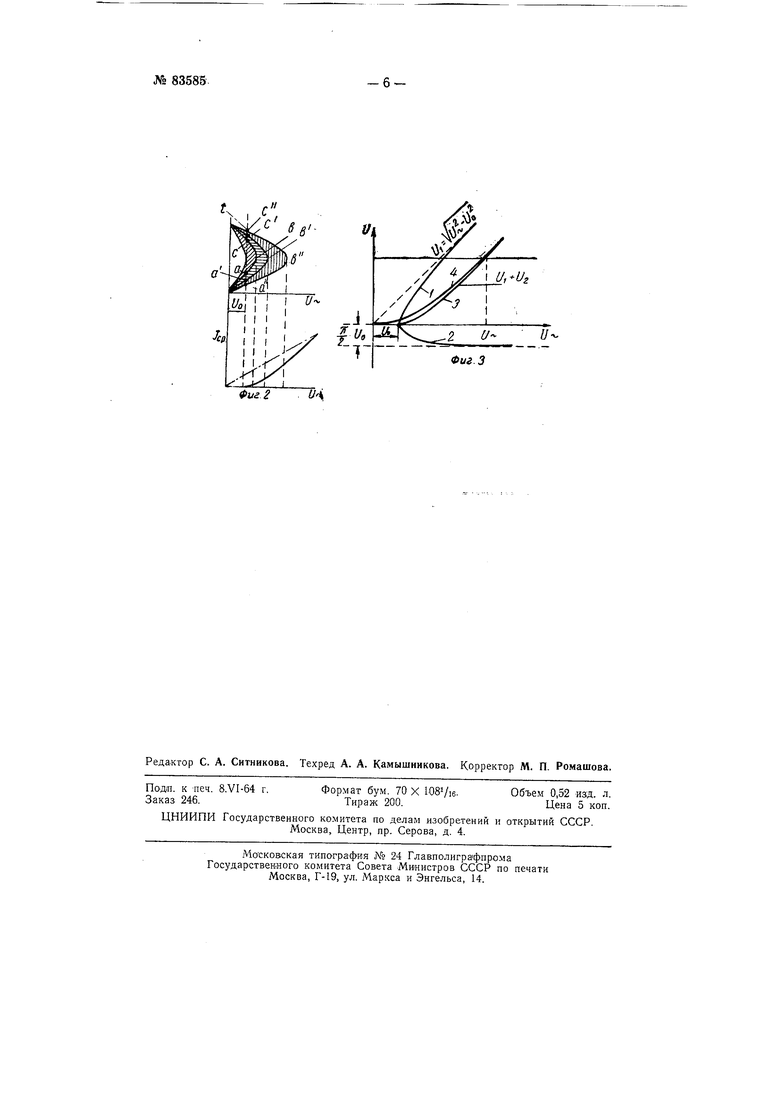
На фиг. 2 показано последовательное нарастание амплитуды напряжения или тока и изменение среднего значения тока или (в другом масштабе) напряжения, которое пропорционально плоплади абс, а в с , и т. д.
Среднее значение тока, как показывают математические выкладки, выражается формулой:
.. г
гр к . . arccosz-у I-щи
Член-/ и 2 - UQ для и Uo растет вначале быстро, а затем медленнее. Для больших f/ Но можно Lo пренебречь, тогда t/, У 0-2-f/ 2 ; и j поэтому кривая U асимптотически приближается к биссектрисе координатного угла (кривая / на фиг. 3).
Член t/o arc cos .-. для небольших U ь U о изменяется вначале быстро, начиная с нуля, а затем растет все медленнее и медленнее, ассимптотически приближаясь к (кривая 2 на фиг. 3).
Складывая алгебраически ординаты кривых / и 2, получим в некотором масштабе кривую 3 изменения среднего значения напряжения или, в некотором другом масштабе, значение тока Jc,, в зависимости от t/-при Но const, а значит и напряжения на /2. Напряжение, подаваемое на сетку, изменяется по такому закону.
- 3 -№ 83585
ит
№ 83585- 4 -
Вычертив кривую 3 и накладывая на нее кривую косинусоиды в разных масштабах (кривая 4, нетрудно подобрать наилучшую аппроксимацию косинусоиды, после чего легко определить и истинную величину напряжения Lo ист батареи, т. к. необходимая величина задана, исходя из характеристики привода продольной подачи.
Скорость поперечной подачи меняется в функции величины отклонения якоря датчика по линейному закону, который близок к начальному участку синусоиды.
При необходимости можно добиться достаточно точной аппроксимации синусоиды включением в анодную цепь ламп усилителя поперечных подач постоянного напряжения от батарей или выпрямителя (положительным полюсом к аноду).
Предмет изобретения
1.Устройство для автоматического управления копировальным станком, с применением индуктивного датчика, напряжение которого подведено к выпрямителю в сеточной цепи электронной лампы, управляющей возбуждением генератора электропривода, отличающееся тем, что, с целью осуществления регулирования привода подачи по закону, близкому к синусоидальному, последовательно в цепь анодов выпрямителя включен источник постоянного напряжения.
2.Устройство по п. 1, отличающееся тем, что, с целью осуществления наилучшего приближения закона регулирования подач к синусоидальному, напряжение датчика подведено к нескольким параллельно включенным выпрямителям, в анодные цепи которых последовательно включены источники постоянного напряжения и омические сопротивления.
й-2
Diic:;
Фиг. /
J, I I I I i/
I I I
Jc
cp
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и сортировки изделий | 1948 |
|
SU80270A1 |
| Масштабно-дистанционная фотокопировальная система | 1955 |
|
SU121164A1 |
| Машина для импульсной контактной электросварки | 1960 |
|
SU137203A1 |
| Электропривод для станков | 1961 |
|
SU146835A1 |
| Электронный регулятор | 1949 |
|
SU89400A1 |
| Устройство для стабилизации напряжения выпрямленного тока | 1933 |
|
SU40445A1 |
| Астатический бесконтактный импульсный регулятор | 1960 |
|
SU133345A1 |
| Электрический нулевой индикатор | 1944 |
|
SU69073A2 |
| СЛЕДЯЩАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ | 1973 |
|
SU395234A1 |
| Стенд для исследования переходных процессов в системах автоматического регулирования | 1947 |
|
SU87332A1 |