Изобретение относится к геофизическим исследованием с использованием импульсных радиолокационных систем и может быть использовано в электромагнитных системах для обнаружения подповерхностных неоднородностей.
Целью изобретения является повышение производительности, надежности, достоверности, а также расширение функциональных возможностей за счет получения информации о глубинах залегания промежуточных и нижней границ подповерхностной неоднородности.
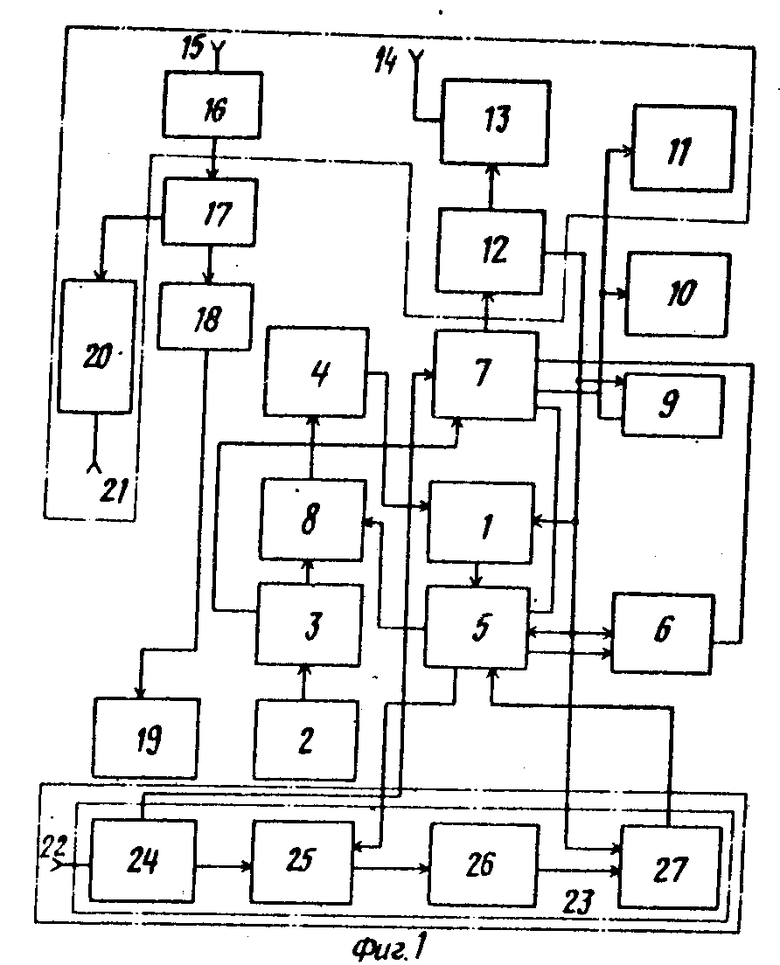
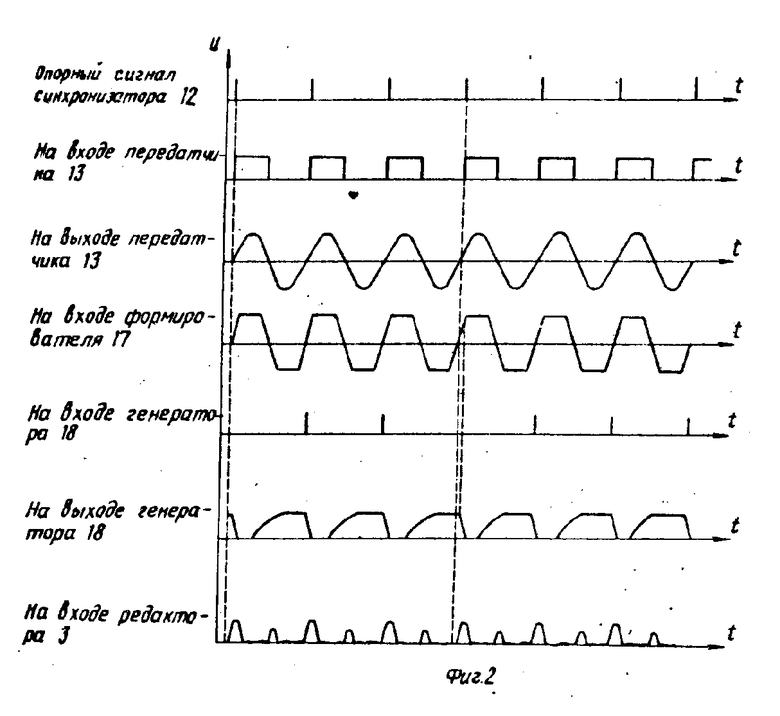
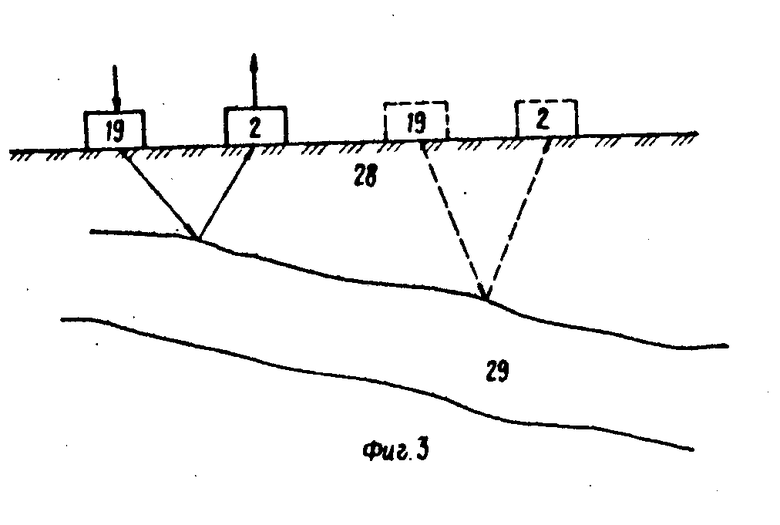
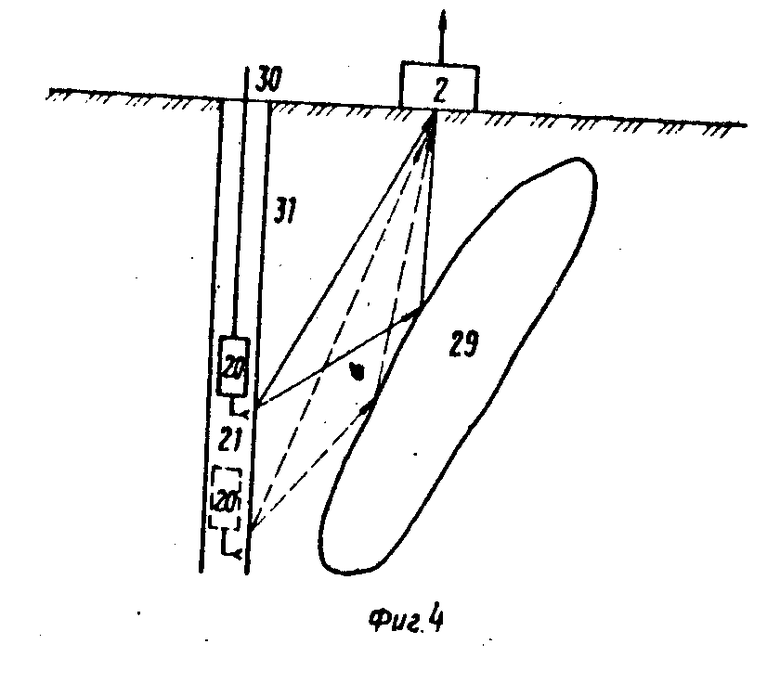
На фиг. 1 приведена структурная схема предлагаемой системы; на фиг. 2 - временные диаграммы работы системы; на фиг. 3, 4, 5, 6 - схемы радиолокационных исследований при различных вариантах работы системы.
Геофизическая радиолокационная система содержит первый стробоскопический преобразователь 1, наземную приемную антенну 2, первый редактор 3 уровня входного сигнала, первый широкополосный усилитель 4, аналоговое устройство 5 обработки, аналогоцифровой преобразователь (АЦП) 6, микропроцессор 7, первый амплитудно-частотный корректор 8, дисплей 9, регистрирующее устройство 10, устройство 11 хранения информации, синхронизатор 12, передатчик 13 синхронизатора с передающей антенной 14 синхронизатора, приемную антенну 15 синхронизатора, подключенную к входу приемника 16 синхронизатора, формирователь 17 импульсов запуска, генератор 18 зондирующих импульсов, наземную передающую антенну 19, скважинный генератор 20 зондирующих импульсов (СГЗИ) со скважинной передающей антенной 21, скважинную приемную антенну 22, подключенную к входу скважинного приемника 23.
Скважинный приемник 23 включает последовательно соединенные второй редактор 24 входного сигнала, второй амплитудно-частотный корректор 25, второй широкополосный усилитель 26 и второй стробоскопический преобразователь 27.
Геофизическая радиолокационная система работает следующим образом.
Вариант "поверхность - поверхность". Наземные передающую 19 и приемную 2 антенны (см. фиг. 3) устанавливают в соответствии с методикой работ, например, вдоль профиля работ с заданной базой. Включают питание.
Синхронизатор 12 вырабатывает опорные импульсы с периодом повторения Тn (см. фиг. 2). Кроме того, синхронизатор 12 формирует периодическую последовательность прямоугольных импульсов ("меандр") с этим же периодом повторения Тn (см. фиг. 2), поступающую на вход передатчика 13 синхронизатора, который по переднему положительному фронту "меандра" вырабатывает синхронизирующий радиосигнал (см. фиг. 2), являющийся первой гармоникой "меандра". Синхронизирующий радиосигнал излучается передающей антенной 14 синхронизатора, принимается приемной антенной 15 синхронизатора и поступает в приемник 16 синхронизатора, где он усиливается, ограничивается (см. фиг. 2) и поступает на вход формирователя 17 импульсов запуска, который по переднему фронту радиоимпульса синхронизации вырабатывает импульс запуска, поступающий на вход генератора зондирующих импульсов (см. фиг. 2). Генератор 18 зондирующих импульсов вырабатывает зондирующий сигнал, который поступает в наземную передающую антенну 19 и посредством ее излучается в исследуемую среду 28, доходит до отражающей границы подповерхностной неоднородности 29, отражается от нее и поступает через наземную приемную антенну 2 на вход первого редактора 3 уровня входного сигнала.
Первый редактор 3 уровня входного сигнала автоматически регулирует амплитуду отраженного сигнала до необходимой величины.
С первого выхода первого редактора 3 уровня входного сигнала на второй вход микропроцессора 7 в цифровом виде подается информация об установленном уровне затухания или усиления входного сигнала. С второго выхода первого редактора 3 уровня входного сигнала отраженный сигнал поступает на второй вход первого амплитудно-частотного корректора 8, где подвергается фильтрации по верхним и нижним частотам. На первый вход первого амплитудно-частотного корректора 8 с третьего выхода аналогового устройства 5 обработки по команде оператора подается управляющий сигнал для установки частот срезов фильтров. С второго выхода аналогового устройства 5 обработки на четвертый вход микропроцессора 7 подается в цифровом виде информация об установленных частотах срезов фильтров нижних и верхних частот.
С выхода первого амплитудно-частотного корректора 8 отраженный сигнал поступает на вход первого широкополосного усилителя 4, где он усиливается и далее поступает на первый вход первого стробоскопичекого преобразователя 1, работа которого синхронизируется импульсом запуска синхронизатора 12. Установку задержки импульса запуска синхронизатора 12 относительно опорного импульса осуществляют по команде оператора сигналом управления в цифровом виде с микропроцессора 7. Первый стробоскопический преобразователь 12 трансформирует отраженный сигнал по времени для обеспечения работы аналого-цифрового преобразователя 6, обладающего относительно малым быстродействием.
С выхода первого стробоскопического преобразователя 1 отраженный сигнал поступает в аналоговое устройство 5 обработки, с второго выхода которого на третий вход микропроцессора 7 подается информационный сигнал в двоичном коде о выбранном законе регулирования усиления во времени.
Момент начала регулирования усиления аналогового устройства 5 обработки задается импульсом запуска, поступающим с первого выхода синхронизатора 12.
С первого выхода аналогового устройства обработки 5 сигнал поступает на первый вход аналого-цифрового преобразователя 6, в котором аналоговый отраженный сигнал преобразуется в цифровой код. Синхронизация работы аналого-цифрового преобразователя 6 осуществляется импульсом запуска синхронизатора 12. Оцифрованный отраженный сигнал поступает на вход микропроцессора 7, где происходит его цифровая обработка. С выхода микропpоцессора 7 отраженный сигнал поступает на вход дисплея 9 и отображается на экране.
Оператор производит анализ отраженного сигнала, осуществляет выбор частот срезов фильтров, режима работы временной автоматической регулировки усиления, количества накоплений, зоны исследуемого сигнала и принимает решение и выводе информации в устройство 11 хранения информации.
При необходимости оператор может принять решение о выводе информации на регистрирующее устройство 10.
На этом работа на данной физической точке заканчивается, и осуществляется переход к следующей физической точке.
При заполнении объема памяти устройства 11 хранения информации последнее меняют с последующей разгрузкой, например, на магнитную ленту.
Вариант "скважина - поверхность". Наземную приемную антенну 2 устанавливают на поверхности исследуемой среды 28 над подповерхностной неоднородностью 29 (см. фиг. 4).
К второму выходу формирователя 17 импульсов запуска подключают посредством каротажного кабеля 30 скважинный генератор 20 зондирующих импульсов, последовательно соединенный со скважинной передающей антенной 21, и опускают их в скважину 31 (см. фиг. 4).
Работа системы в данном варианте соответствует работе системы в варианте "поверхность - поверхность".
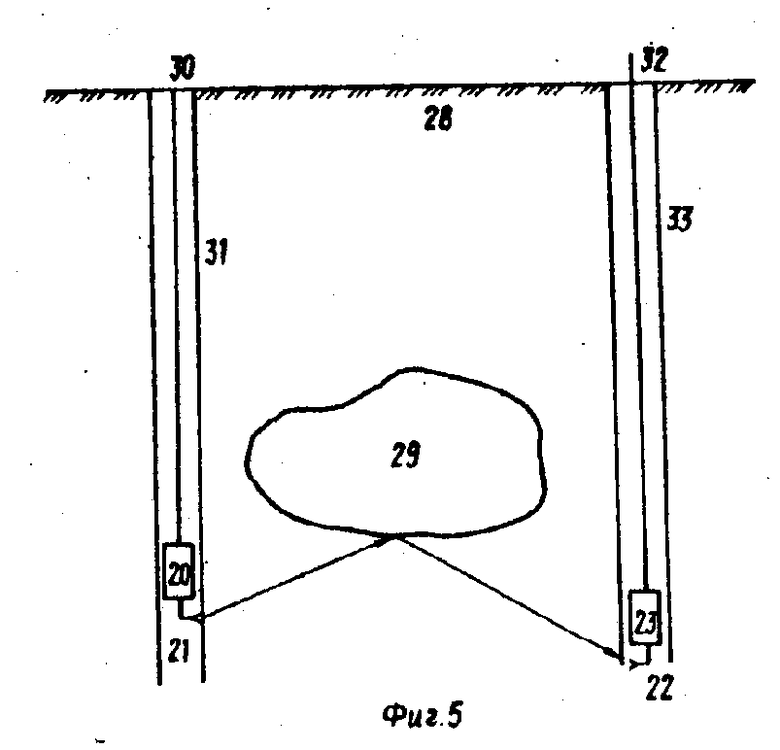
Вариант "скважина - скважина". К второму выходу формирователя 17 импульсов запуска посредством каротажного кабеля 30 подключают скважинный генератор 20 зондирующих импульсов со скважинной передающей антенной 21 и, опускают их в скважину 31. Скважинный приемник 23 посредством каротажного кабеля 32 подключают к микропроцессору 7 и аналоговому устройству 5 обработки и вместе со скважинной приемной антенной 22 опускают в скважину 33 (см. фиг. 5).
Работа системы в этом варианте аналогична ее работе в варианте "поверхность - поверхность". Отличие заключается в том, что отраженный от подповерхностной неоднородности 29 сигнал поступает через скважинную приемную антенну 22 на вход второго редактора 24 уровня входного сигнала, который автоматически регулирует амплитуду отраженного сигнала до необходимой величины.
С первого выхода второго редактора уровня входного сигнала на пятый вход микропроцессора 7 в цифровом виде подается информация об установленном уровне затухания или усилении входного сигнала. С второго его выхода отраженный сигнал поступает на первый вход второго амплитудно-частотного корректора 25, где подвергается фильтрации по верхним и нижним частотам. На второй вход второго амплитудно-частотного корректора 25 с четвертого выхода аналогового устройства 5 обработки по команде оператора подается управляющий сигнал для установки срезов фильтров.
С выхода аналогового устройства 5 обработки на вход микропроцессора 7 подается в цифровом виде информация об установленных частотах срезов фильтров нижних и верхних частот. С выхода второго амплитудно-частотного корректора 25 отраженный сигнал поступает на вход второго широкополосного усилителя 26, где он усиливается, и далее поступает на вход второго стробоскопического преобразователя 27, работа которого синхронизируется импульсами запуска синхронизатора 12.
В остальном работа системы не отличается от ее работы в варианте "поверхность - поверхность".
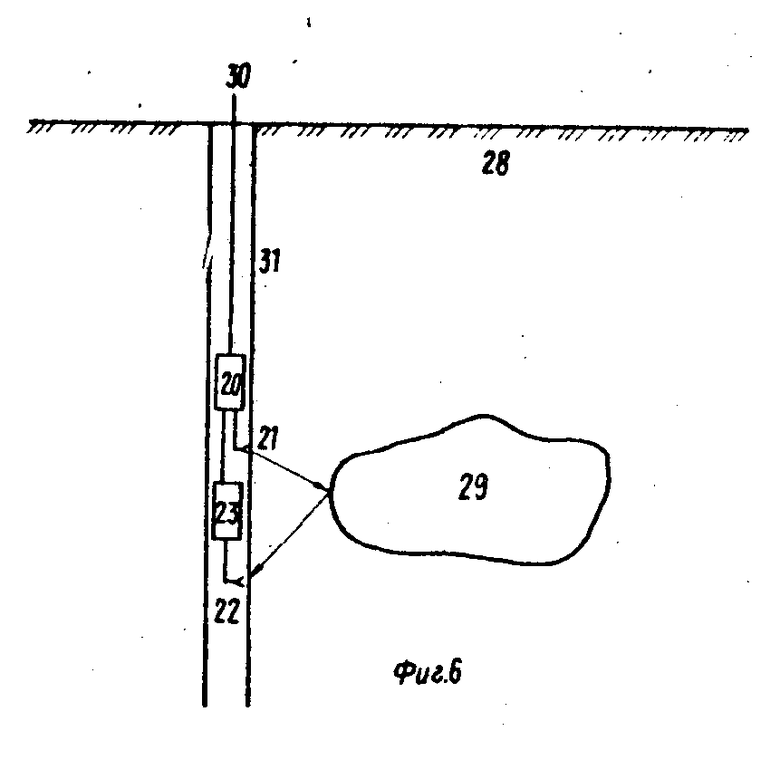
Односкважинный вариант. Скважинный генератор зондирующих импульсов со скважинной передающей антенной 21 и скважинный приемник 23 со скважинной приемной антенной 22 соединяют посредством каротажного кабеля 30 с наземной частью системы и опускают в скважину 31 (см. фиг. 6).
Расстояние между скважинной передающей антенной 21 и скважинной приемной антенной 22 устанавливают в зависимости от конкретных геологических условий.
Сканируя скважинными приборами по скважине 31, выявляют положение подповерхностнрой неоднородности 29.
Работа системы аналогична работе системы в варианте "скважина - скважина".
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2003 |
|
RU2234112C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2000 |
|
RU2194292C2 |
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2010 |
|
RU2433423C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 1996 |
|
RU2105330C1 |
| РАДИОЛОКАТОР ДЛЯ ОБНАРУЖЕНИЯ НЕОДНОРОДНОСТЕЙ В ПОДПОВЕРХНОСТНОМ СЛОЕ ЗЕМЛИ | 2002 |
|
RU2200332C1 |
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС ДЛЯ ПОИСКА ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ "ГФК-1" | 2005 |
|
RU2283519C1 |
| УСТРОЙСТВО ДЛЯ ВЫСОКОЧАСТОТНОЙ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1996 |
|
RU2100827C1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1988 |
|
SU1699273A1 |
| Бортовая радиолокационная станция дистанционно управляемого летательного аппарата | 2017 |
|
RU2668995C1 |
Изобретение относится к геофизическим исследованиям с использованием радиолокационных систем и может быть использовано в электромагнитных системах для обнаружения подповерхностных неоднородностей. Целью изобретения является повышение производительности, надежности достоверности, а также расширение функциональных возможностей за счет получения информации о глубинах залегания промежуточных и нижней границ подповерхностной неоднородности. С этой целью система снабжена передатчиком синхронизатора с передающей антенной синхронизатора, приемником синхронизатора с приемной антенной синхронизатора, скважинным генератором зондирующих импульсов со скважиной передающей антенной и скважинным приемником со скважинной приемной антенной. Передатчик синхронизатора вырабатывает радиосигналы синхронизации. Эти сигналы принимаются приемником синхронизатора, по сигналу с которого запускается генератор зондирующих импульсов (либо наземный, либо скважинный). Зондирующие импульсы принимаются скважинным или наземным приемником в зависимости от методики работы. Принятый сигнал обрабатывается и записывается в устройства памяти. 6 ил.
ГЕОФИЗИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА, содержащая первый стробоскопический преобразователь, наземную приемную антенну, первый редактор входного сигнала, первый широкополосный усилитель, аналоговое устройство обработки, аналого-цифровой преобразователь, микропроцессор, первый амплитудно-частотный корректор, дисплей, регистрирующее устройство, устройство хранения информации, синхронизатор и последовательно соединенные формирователь импульсов запуска, генератор зондирующих импульсов и наземную передающую антенну, при этом выход первого широкополосного усилителя подключен к первому входу первого стробоскопического преобразователя, первый выход аналогового устройства обработки через аналого-цифровой преобразователь соединен с первым входом микропроцессора, первый выход которого подсоединен к входу синхронизатора, а второй выход - к входам устройства хранения информации регистрирующего устройства и первому входу дисплея, первый выход синхронизатора подключен к второму входу первого стробоскопического преобразователя, первому входу аналогового устройства обработки, второму входу аналого-цифрового преобразователя и к второму входу дисплея, наземная приемная антенна подсоединена к входу первого редактора уровня входного сигнала, первый выход которого подключен к второму входу микропроцессора, третий вход которого соединен с вторым выходом аналогового устройства обработки, третий выход которого подключен к первому входу первого амплитудно-частотного корректора, отличающаяся тем, что, с целью повышения производительности, надежности, достоверности, а также расширения функциональных возможностей за счет получения информации о глубинах залегания промежуточных и нижней границ подповерхностной неоднородности, она снабжена передатчиком синхронизатора с передающей антенной синхронизатора, приемником синхронизатора с приемной антенной синхронизатора, скважинным генератором зондирующего сигнала со скважинной передающей антенной и скважинным приемником со скважинной приемной антенной, при этом скважинный приемник включает последовательно соединенные вторые редактор уровня входного сигнала, амплитудно-частотный корректор, широкополосный усилитель и стробоскопический преобразователь, второй вход которого соединен с первым выходом синхронизатора, а выход является первым выходом скважинного приемника и подключен к второму входу аналогового устройства обработки, четвертый выход которого подсоединен к второму входу второго амплитудно-частотного корректора скважинного приемника, второй выход второго редактора уровня входного сигнала является вторым выходом скважинного приемника и соединен с четвертым входом микропроцессора, выход первого стробоскопического преобразователя подключен к третьему входу аналогового устройства обработки, второй выход синхронизатора подсоединен к выходу передатчика синхронизатора, выход приемника синхронизатора соединен с входом формирователя импульсов запуска, второй выход которого подключен к входу скважинного генератора зондирующих импульсов, второй выход первого редактора уровня входного сигнала через первый амплитудно-частотный корректор соединен с входом первого широкополосного усилителя, а устройство хранения информации выполнено в виде сменной интегральной твердотельной памяти.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Проспект фирмы ОУО Corporation and KODEN Electronics Co ltd, Tokyo, Japan, 1984. | |||
