Изобретение относится к геофизике и может быть использовано для дистанционного исследования поверхности Земли, подповерхностной структуры почв, пород, обнаружения зарытых объектов, а также повышения безаварийности движения транспортных средств в труднопроходимых условиях и при ограниченной видимости.
Известна система исследования подземных объектов, которая содержит широкополосную антенну, которая с началом каждого видеокадра возбуждается короткими импульсами и излучает вглубь земли электромагнитные волны. Сигналы, отраженные подземным слоем или находящимися в земле предметами, поступают на приемное устройство. Отраженные сигналы стробируются с периодом, несколько длиннее периода видеокадров, и преобразуются в сигнал с более низкой частотой кадровой развертки, после чего принятый сигнал проходит через блок видеосигнала на индикаторное устройство. Система отличается тем, что содержит фильтр, который включен до или после блока стробирования и полосу пропускания которого можно регулировать, и управляющий блок, который с каждым видеокадром или каждым кадром, имеющим пониженную частоту, по истечении заданного времени с начала кадра постепенно сужает полосу пропускания фильтра, а также сдвигает среднюю частоту полосы пропускания фильтра в сторону понижения [1]
Известная система обеспечивает оптимальную фильтрацию (прием) отраженного сигнала в предположении, что его высокочастотные составляющие с увеличением глубины затухают больше (сужение полосы отраженного сигнала), а максимум спектральной плотности мощности сигнала сдвигается в сторону более низких частот, обладающих большей проникающей способностью в подпочвенных слоях грунта (сдвиг средней частоты полосы пропускания фильтра в сторону понижения).
В конечном счете оптимизация преследует цель повышение отношения "сигнал-шум", а значит, и глубины исследования.
Однако в этой известной системе отсутствует блок, анализирующий закон затухания частотных составляющих сигнала в грунте конкретно исследуемого места и вырабатывающий требуемую функцию управления перестройкой фильтра для управляющего блока, в результате чего простое сужение полосы и ее сдвиг в низкочастотную область с увеличением глубины исследований может оказаться неоптимальным, что приведет к снижению разрешающей способности системы.
Известное устройство, содержащее генератор тактовых импульсов, ограничитель, последовательно соединенные генератор быстрого пилообразного напряжения, схему сравнения, формирователь строб-импульсов, стробоскопический смеситель, снабжено аналого-цифровым преобразователем, элементом задержки, демультиплексором, регистром последовательных приближений, блоком оперативной памяти, сумматором, двумя цифро-аналоговыми преобразователями, узлом сравнения кодов, узлом постоянной памяти, счетчиком и элементом И с инверсией [2] В данном устройстве динамический диапазон расширяется за счет устранения перегрузки стробоскопического смесителя путем создания компенсирующего напряжения, которое формируется в цифровой форме и хранится в блоке оперативной памяти.
Однако известное устройство имеет аппаратную избыточность и тем большую, чем больше интервал толщин исследуемых земных покровов.
Наиболее близким к предлагаемому изобретению является устройство для определения подповерхностной структуры слоистых земных покровов, содержащее генератор тактовых импульсов, генератор видеоимпульсов, приемный блок, в состав которого входят генератор быстрого пилообразного напряжения, блок сравнения, формирователь строб-импульсов, стробоскопический смеситель, блок компенсации помех переотражений в коаксиальной линии, выход которого через фильтр нижних частот соединен с индикатором на ЭЛТ.
В описанном устройстве динамический диапазон системы расширяется в сторону минимума за счет снижения помехи в принятом сигнале путем вычитания из него напряжения, соответствующего масштабно-преобразованным сигналам, появляющимся в результате переотражений от концов и внутренних неоднородностей коаксиальной линии, соединяющей антенну с генератором видеоимпульсов.
Однако известное устройство не устраняет помехи в виде поверхностной волны переотражений на границе "воздух-почва" и "паразитное" проникновение сигнала через вход смесителя, вследствие чего устройство имеет невысокую эффективность определения структуры слоистых земных покровов в широком интервале их толщин.
Кроме того, устройство обладает недостаточной величиной динамического диапазона в сторону "максимума", что отрицательно сказывается на работе устройства с сигналами большой мощности, т.е. при исследовании больших глубин.
Задача предлагаемого изобретения создание устройства для высокочастотной геоэлектроразведки с расширенным динамическим диапазоном за счет устранения перегрузки стробоскопического приемника путем регулирования мощности излучаемого сигнала и снижения уровня помех в принятом сигнале.
Задача решается тем, что в устройстве для высокочастотной геоэлектроразведки, содержащем передающий и приемный блоки, причем передающий блок включает последовательно соединенные генератор тактовых импульсов, генератор видеоимпульсов и передающую антенну, а приемный блок, соединенный управляющим входом с управляющим выходом передающего блока, включает генератор пилообразного напряжения, схему сравнения и формирователь строб-импульсов, соединенные в последовательную цепь, причем вход генератора пилообразного напряжения является управляющим входом приемного блока; приемную антенну и стробоскопический смеситель, первый и второй входы которого соединены соответственно с приемной антенной и первым выходом формирователя строб-импульсов, согласно изобретению в устройство введена бортовая ЭВМ; соединение передающего и приемного блоков осуществлено с помощью волоконно-оптической линии связи, подключенной к выходу генератора тактовых импульсов; передающий блок содержит блок управления, вход которого соединен с первым выходом бортовой ЭВМ, а первый выход с входом генератора тактовых импульсов, а второй выход с вторым входом генератора видеоимпульсов; приемный блок содержит микроЭВМ, первый вход которой соединен с вторым выходом бортовой ЭВМ; ограничитель, через который приемная антенна подключена к первому входу стробоскопического смесителя, выход которого соединен с последовательной цепью, состоящей из усилителя с регулируемым коэффициентом усиления, схемы выборки/хранения, второй вход которой соединен с вторым выходом формирователя строб-импульсов и аналого-цифрового преобразователя, первый и второй выходы которого подключены ко второму и третьему входам микроЭВМ; блок управления генератором пилообразного напряжения, вход которого соединен с первым выходом микроЭВМ, а выход с вторым входом генератора пилообразного напряжения; первый цифроаналоговый преобразователь, вход которого соединен с вторым выходом микроЭВМ, а выход с вторым входом схемы сравнения; блок управления формирователем строб-импульсов, вход которого соединен с третьим выходом микроЭВМ; а выход с вторым входом формирователя строб-импульсов; второй цифроаналоговый преобразователь, вход которого соединен с четвертым выходом микро ЭВМ, а выход с вторым входом усилителя с регулируемым коэффициентом усиления, причем пятый выход микроЭВМ соединен с входом бортовой ЭВМ, при этом передающая антенна с генератором видеоимпульсов, а также приемная антенна с ограничителем и стробоскопическим смесителем интегрированы конструктивно.
Кроме того, передающий и приемный блоки устройства, а также бортовая ЭВМ могут быть установлены на передвижную платформу, в состав которой входит датчик пути, выход которого соединен с четвертым входом микроЭВМ.
В таком устройстве:
введенная в него бортовая ЭВМ, управляющая режимами работы устройства, позволяет вырабатывать и устанавливать исходные данные по режимам работы приемника и передатчика; в нее поступают данные от микроЭВМ по отраженным сигналам и сигналам, записанным в различных режимах, она обрабатывает эти данные и вырабатывает установочные коды для передающего и приемного блоков в следующем цикле работы, отображает на дисплее отраженные сигналы в точках зондирования, а после их совокупной обработки отображает двух- или трехмерные изображения подповерхностных структур, обеспечивает согласованную работу передающего и приемного устройства, что способствует расширению динамического диапазона устройства;
соединение передающего и приемного блоков с помощью волоконно-оптической линии связи позволило устранить помеху в виде наведенной волны, распространяющейся вдоль экрана коаксиального кабеля соединения, и резко улучшить помеховую устойчивость при работе устройства, расширяя его динамический диапазон;
наличие блока управления в передающем блоке, соединенным своим входом с первым выходом бортовой ЭВМ, первым выходом с первым входом генератора видеоимпульсов, а вторым выходом с входом генератора тактовых импульсов, обеспечивает переключение уровня излучаемой мощности до необходимого при зондировании на заданную глубину, а согласование этого уровня и момента открывания входа приемного блока позволяет увеличить динамический диапазон устройства в сторону излучения сигналов большой мощности, не перегружая при этом вход приемного блока;
микроЭВМ в блоке приемника обеспечивает управление всеми режимами приемника, "запоминает" коды отраженных сигналов, делает их путевую привязку и передает в бортовую ЭВМ, которая перенастраивает приемный блок, компенсируя помехи "проникновения", что расширяет динамический диапазон устройства;
наличие блока управления генератора пилообразного напряжения обеспечивает возможность работы устройства на нескольких развертках и выбор в районе зондирования той из них, которая определяется необходимой разрешающей способностью и необходимой глубиной, при этом обеспечивается оптимальное управление устройства в необходимом динамическом диапазоне излучаемых/принимаемых сигналов;
наличие усилителя с регулируемым коэффициентом усиления позволяет согласовать динамический диапазон стробоскопического смесителя с динамическим диапазоном аналого-цифрового преобразователя; при перестройке мощности передатчика согласованно перестраивается коэффициент усиления, в усилителе с регулируемым коэффициентом усиления обеспечивая нормирование сигнала в расширенном динамическом диапазоне устройства;
наличие блока управления формирователем строб-импульсов обеспечивает реализацию режимов "фон" и "сигнал-фон", способствующим расширению динамического диапазона устройства;
наличие первого цифроаналогового преобразователя, обеспечивающего подачу на второй вход схемы сравнения медленного ступенчатого пилообразного напряжения, пропорционального коду точки развертки, и наличие второго цифроаналогового преобразователя, обеспечивающего подачу на второй вход усилителя с регулируемым коэффициентом усиления напряжения, пропорционального требуемому коэффициенту усиления, позволяет осуществлять цифровое управление параметрами приемного блока, что повышает точность временной привязки выборок сигнала;
наличие схемы выборки/хранения обеспечивает постоянство напряжения на входе аналого-цифрового преобразователя в течение всего времени его преобразования в код за счет чего снижается уровень шумов на входе аналого-цифрового преобразователя и расширяется динамический диапазон устройства;
возможность установки бортовой ЭВМ, передающего и приемного блоков на передвижную платформу, в состав которой входит пути, соединенный входом с четвертым входом микроЭВМ, которая осуществляет привязку точки зондирования к конкретному отрезку пути, позволяет при обработке совокупности, привязанных измерений в бортовой ЭВМ получать 2- и 3-мерные изображения подповерхностных структур, улучшая разрешающую способность и расширяя динамический диапазон устройства;
наличие ограничителя предохраняет вход приемного блока при больших сигналах приема;
конструктивное интегрирование передающей антенны с генератором видеоимпульсов, а также приемной антенны с ограничителем и стробоскопическим смесителем позволяет устранить источник помех в виде переотражений в коаксиальных линиях связи и дает возможность обрабатывать сигналы с меньшим соотношением сигнал/помеха, т.е. увеличивает динамический диапазон в сторону минимальных сигналов.
Сопоставительный анализ предлагаемого устройства для высокочастотной геоэлектроразведки и прототипа показывает, что предлагаемое устройство отличается от известного тем, что в него введена бортовая ЭВМ, соединение передающего и приемного блоков осуществлено с помощью волоконно-оптической линии связи, подключенной к генератору тактовых импульсов; передающий блок содержит блок управления, вход которого соединен с первым выходом бортовой ЭВМ, первый выход соединен с входом генератора тактовых импульсов, а второй выход с вторым входом генератора видеоимпульсов; приемный блок содержит микро-ЭВМ, первый вход которой соединен с вторым выходом бортовой ЭВМ; ограничитель, через который приемная антенна подключена к первому входу стробоскопического смесителя, выход которого соединен с последовательной цепью, состоящей из усилителя с регулируемым коэффициентом усиления, схемы выборки/хранения, второй вход которой соединен со вторым выходом формирователя строб-импульсов, и аналого цифрового преобразователя, первый и второй выходы которого подключены ко второму и третьему входам микроЭВМ; блок управления генератором пилообразного напряжения, вход которого соединен с первым выходом микроЭВМ, а выход с вторым входом генератора пилообразного напряжения; первый цифроаналоговый преобразователь, вход которого соединен со вторым выходом микроЭВМ, а выход с вторым входом схемы сравнения; блок управления формирователем строб-импульсов, вход которого соединен с третьим выходом микроЭВМ, а выход с вторым входом формирователя строб-импульсов; второй цифроаналоговый преобразователь, вход которого соединен с четвертым выходом микроЭВМ, а выход со вторым выходом усилителя с регулируемым коэффициентом усиления, причем пятый выход микроЭВМ соединен со входом бортовой ЭВМ, при этом передающая антенна с генератором видеоимпульсов, а также приемная антенна с ограничителем и стробоскопическим смесителем интегрированы конструктивно.
Передающий и приемный блоки, а также бортовая ЭВМ могут быть установлены на передвижную платформу, в состав которой входит датчик пути, выход которого соединен с четвертым входом микроЭВМ.
Сравнение предлагаемого устройства не только с прототипом, но и с другими техническими решениями в данной области техники позволило сделать вывод, что оно явным образом не следует из уровня техники и, следовательно, соответствует критерию "изобретательский уровень".
Возможность широкого использования заявляемого устройства в геофизике в частности для дистанционного исследования поверхности Земли, подповерхностной структуры почв, пород, обнаружения зарытых предметов, а также для повышения безаварийности движения транспортных средств в труднопроходимых условиях и при ограниченной видимости, обеспечивает ему критерий "промышленная применимость".
На чертеже представлена блок-схема устройства.
Устройство содержит передающий 1 и приемный 2 блоки, связанные между собой линией синхронизации и работающие под управлением бортовой ЭВМ 3, при этом передающий блок 2 включает генератор тактовых импульсов 4, генератор видеоимпульсов 5, блок управления 6, вход которого соединен с первым выходом бортовой ЭВМ 3, а выходы с входом генератора тактовых импульсов 4 и вторым входом генератора видео-импульсов 5, причем выход генератора тактовых импульсов 4 соединен с первым входом генератора видеоимпульсов 5, соединение передающего и приемного блоков осуществлено с помощью волоконно-оптической линии связи 8; приемный блок 2 содержит микроЭВМ 9, первый вход которой соединен со вторым выходом бортовой ЭВМ 3; приемную антенну 10, последовательно соединенные с ней ограничитель 11, стробоскопический смеситель 12, усилитель с регулируемым коэффициентом усиления 13, схему выборки/хранения 14, аналого-цифровой преобразователь 15, первый и второй выходы которого соединены со вторым и третьим входами микроЭВМ 9; генератор пилообразного напряжения 16, вход которого является управляющим входом приемного блока 2, подключен вторым своим входом к выходу блока управления генератором пилобразного напряжения 17, вход которого соединен с первым выходом микроЭВМ 9; выход генератора пилообразного напряжения 16 соединен со входом схемы сравнения 18, второй вход которой соединен с выходом первого цифроаналогового преобразователя 19, вход которого соединен с вторым выходом микроЭВМ 9; выход схемы сравнения 18 соединен с входом формирователя строб-импульсов 20, первый выход которого соединен с входом стробоскопического смесителя 12, второй выход с входом схемы выборки/хранения 14, а его вход с выходом блока управления формирователем строб-импульсов 21, вход которого соединен с третьим выходом микроЭВМ 9, четвертый выход микро ЭВМ 9 соединен со входом второго цифроаналогового преобразователя 22, выход которого соединен со входом усилителя с регулируемым коэффициентом усиления 13; пятый выход микроЭВМ 9 соединен со входом бортовой ЭВМ 3.
Передающая антенна 7 с генератором видеоимпульсов 5, а также приемная антенна 10 с ограничителем 11 и стробоскопическим смесителем 12 интегрированы конструктивно.
Передающий 1 и приемный 2 блоки, а также бортовая ЭВМ 3 могут быть расположены на передвижной платформе 23, в состав которой входит датчик пути 24, выход которого соединен с четвертым входом микроЭВМ 9.
Бортовая ЭВМ 3 управляет согласованной работой передающего блока 1 и приемного блока 2 в задаваемом оператором режиме и может быть типа "Note Book".
МикроЭВМ 9 может быть выполнена на основе микропроцессора серии "Iutel" и служит для управления работой приемного блока 2.
Устройство работает следующим образом.
Оператор бортовой ЭВМ 3 вводит в управляющую программу исходные данные по одному из следующих режимов:
А "Сигнал";
Б "Фон";
В "Сигнал" "Фон".
Перечисленные режимы могут выполняться с накоплением или без накопления данных в одной точке зондирования.
А. В режиме "Сигнал".
из бортовой ЭВМ 3 по первому выходу в блок управления 6 передается код начальной мощности, который после преобразования в аналоговый сигнал по первому выходу поступает в генератор видеоимпульсов 5, и признак запуска генератора тактовых импульсов 4, который по второму выходу запускает генератор тактовых импульсов 4; с выхода генератора 4 тактовые импульсы поступают в генератор видеоимпульсов 5, который вырабатывает видеоимпульсы требуемой амплитуды, излучаемые передающей антенной 7 в исследуемую среду; одновременно тактовые импульсы с генератора 4 поступают на вход передатчика волоконно-оптической линии связи 8, преобразуется в нем в световые импульсы и по волоконно-оптическому кабелю передаются в приемник;
из бортовой ЭВМ 3 оп второму выходу в микроЭВМ 9 приемника 2 передаются воды, определяющие режим работы приемника; после их запоминания и обработки микроЭВМ 9 устанавливает блоки приемника 2 в состояние, соответствующее шагу развертки; по первому выходу микроЭВМ 9 устанавливает в блоке управления генератором пилообразного напряжения 17 код развертки, при этом управляющем сигнале генератор пилообразного напряжения 16 переключается в состояние, обеспечивающее необходимую длительность импульсов пилообразного напряжения; по второму выходу микроЭВМ 9 устанавливает в первом цифроаналоговом преобразователе 19 код номера шага развертки, а на выходе первого цифроаналогового преобразователя 19 устанавливается соответствующее напряжение; по третьему выходу микроЭВМ 8 устанавливает в блок управления формирователем строб-импульсов 21 признак: "формируются/не формируются строб-импульсы"; в режиме "сигнал" значение этого кода- "формируются строб-импульсы". На выходе блока управления формирователем строб-импульса 21 устанавливается соответствующее управляющее напряжение, поступающее в формирователь строб-импульсов 20; по четвертому выходу микроЭВМ устанавливает во втором цифроаналоговом преобразователе 22 код коэффициента усиления, а полученное на выходе второго цифроаналогового преобразователя 22 напряжение подается на второй вход усилителя с регулируемым коэффициентом усиления 13 и устанавливает его в требуемое состояние.
На этом установка режима приемника 2 завершена и микроЭВМ 9 переходит в режим ожидания сигнала "Готовность аналого-цифрового преобразователя" по второму входу.
Одновременно микроЭВМ 9 может обрабатывать сигналы от датчика пути 24, поступающие на четвертый вход.
Световой импульс синхронизации из волоконно-оптической линии связи 8 поступает в приемник волоконно-оптической линии связи, преобразуется в импульс напряжения и поступает на первый вход запуска генератора пилообразного напряжения 16. Импульс пилообразного напряжения поступает на первый вход схемы сравнения 18 и сравнивается с напряжением на ее втором входе. В момент их равенства на входе схемы сравнения 18 вырабатывается импульс, поступающий на первый вход формирователя строб-импульсов 20, с первого выхода которого строб-импульс поступает на второй вход стробоскопического смесителя 12, на первый вход которого от приемной антенны 10 через ограничитель 11 поступает отраженный сигнал. В стробоскопическом смесителе 12 происходит фиксация напряжения, пропорционального мгновенному значению сигнала на первом входе в этот момент времени. Далее это напряжение поступает на первый вход усилителя с регулируемым коэффициентом усиления 13, усиливается до необходимой величины и поступает на первый вход схемы выборки/хранения 14, на второй вход которой поступает "растянутый" строб-импульс с второго выхода формирователя строб-импульсов 20.
Завершив преобразование входного напряжения в код аналого-цифровой преобразователь 15 на первом выходе устанавливает сигнал "Готовность АЦП", который поступает на второй вход микроЭВМ 9 и запускает подпрограмму приема данных из аналогоцифрового преобразователя в память микроЭВМ 9, после чего микроЭВМ 9 устанавливает состояние приемника для следующего шага стробирования, если интервал стробирования, заданный бортовой ЭВМ 3, не пройден. В противном случае микроЭВМ 9 передает по пятому выходу в бортовую ЭВМ 3 данные по выборкам отраженного сигнала в заданном интервале стробирования и код путевой метки для этой точки зондирования.
Бортовая ЭВМ 3, если задание оператора выполнено, отображает информацию для оператора о его завершении.
В противном случае бортовая ЭВМ 3 выдает следующее задание в микроЭВМ 9 и согласованно изменяет состояние передатчика.
Шаги стробирования могут следовать друг за другом как в направлении увеличения глубины, так и в направлении ее уменьшения.
Б. В режиме "Фон":
в отличие от режима "Сигнал" микроЭВМ 9 выдает в блок управления формирователя строб-импульсов 21 код, запрещающий появление импульсов на первом выходе формирователя строб-импульсов 20. При этом с выхода стробоскопического смесителя 12 снимается напряжение помехи "проникания", которая в режиме "Сигнал" в виде аддитивной составляющей присутствует в сигнале и вносит в него низкочастотные искажения. Таким образом, в оперативную память микроЭВМ 9 записывается помеха "проникания".
В. В режиме "Сигнал Фон"
микроЭВМ 9, установив код шага стробирования в первом цифроаналоговом преобразователе 19, выполняет действия режима "Сигнал" и запоминает код мгновенного значения сигнала. После этого, не изменяя код в первом цифроаналоговом преобразователе 19, микроЭВМ 9 выполняет действия режима "Фон". Полученное значение помехи "проникания" вычитается из значения сигнала и результирующее значение записывается в память микроЭВМ 9, после чего она устанавливает в первом цифроаналоговом преобразователе 19 код следующего шага и повторяет действия, описанные выше. После выполнения задания по всему интервалу стробирования микроЭВМ передает данные в бортовую ЭВМ 3.
Обработанные в бортовой ЭВМ 3 данные исследования отображаются на дисплее ЭВМ в виде одно-, двух- или трехмерных структур, а также могут быть распечатаны на бумаге или записаны на сменный магнитный носитель (дискеты).
Таким образом, предлагаемое устройство выгодно отличается от прототипа [3] тем, что:
при необходимости увеличения мощности видеоимпульса при зондировании на большую глубину устройство регулируется с помощью блока управления 6, установленным в передающем блоке 1, что исключает перенастройку устройства вручную;
применение волоконно-оптической линии связи 8 для синхронизации работы передающего 1 и приемного 2 блоков позволило устранить помеху в виде наведенной волны, распространяющейся вдоль экрана (металлической оплетки) коаксиального кабеля синхронизации;
применение в устройстве ЭВМ позволило разносить во времени процессы записи и компенсации помех в сигнале, а также производить их с требуемой точностью, обеспечивая цифровое управление процессами; микроЭВМ 9 производит компенсацию помех "проникания", возникающих в конкретной точке зондирования; бортовая ЭВМ 3 обеспечивает согласованные в каждом шаге перенастройку параметров приемника и изменение мощности передатчика;
наличие блока управления генератора пилообразного напряжения 17 обеспечивает возможность работы устройства на нескольких длительностях развертки и выбор в данный момент той из них, которая определяется необходимой разрешающей способностью и необходимой глубиной;
наличие усилителя с регулируемым коэффициентом усиления, во-первых, позволяет согласовать динамический диапазон стробоскопического смесителя 12 с динамическим диапазоном аналого-цифрового преобразователя 15; во-вторых, при перестройке мощности передатчика согласованно перестраивается коэффициент усиления в усилителе с регулируемым коэффициентом усиления 13 для улучшения разрешающей способности устройства при обеспечении нормирования сигнала;
наличие блока управления формирователем строб-импульсов 21 обеспечивает реализацию режимов "Фон" и "Сигнал Фон";
наличие первого цифроаналогового преобразователя 19 обеспечивает выработку медленного ступенчатого пилообразного напряжения, сравниваемого в схеме сравнения 18 с пилообразным напряжением генератора 16;
наличие второго цифроаналогового преобразователя 22 обеспечивает управление усилителем с регулируемым коэффициентом усиления 13 кодами от микроЭВМ 9;
наличие схемы выборки/хранения 14 обеспечивает постоянство напряжения на входе аналого-цифрового преобразователя 15 в течение всего времени его преобразования в код, за счет чего снижается уровень шумов на входе аналого-цифрового преобразователя 15;
наличие ограничителя 11 предохраняет вход приемного блока 2 при больших сигналах приема;
конструктивное интегрирование предающей антенны 7 с генератором видеоимпульсов 5, а также приемной антенны 10 с ограничителем 11 и стробоскопическим смесителем 12 позволяет устранить источник помех в виде переотражений в коаксиальных линиях связи;
возможная установка передающего 1 и приемного 2 блоков, а также бортовой ЭВМ 3 на передвижную платформу 23, в состав которой входит датчик пути 24, соединенный входом с четвертым входом микроЭВМ 9, которая осуществляет привязку точки зондирования к конкретному отрезку пути, позволяет при обработке совокупности привязанных измерений в бортовой ЭВМ 3 получать двух и трех мерные изображения подповерхностных структур.
Указанные преимущества обеспечивают расширение динамического диапазона обрабатываемых в устройстве сигналов как в сторону максимума, так и в сторону минимума по сравнению с прототипом, что позволяет увеличить глубину зондирования.
Источники информации.
1. Акц. заявка Японии N 3-47474, кл. G 01 Y 3/12; G 01 S 13/88, опублик. 19.07.91.
2. Авторское свидетельство СССР N 161398, кл. G 01 Y 3/12 опублик. 15.12.90.
3. Авторское свидетельство СССР N 995040, кл. G 01 S 13/02, оп. 07.02.83 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство высокочастотной геоэлектроразведки | 1986 |
|
SU1427321A1 |
| Устройство для определения подповерхностной структуры слоистых земных покровов | 1981 |
|
SU995040A1 |
| Устройство для определения подповерхностной структуры слоистых земных покровов | 1988 |
|
SU1562883A1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2008 |
|
RU2375729C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 1998 |
|
RU2143708C1 |
| УСТРОЙСТВО ДЛЯ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 1994 |
|
RU2080622C1 |
| СТАНЦИЯ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ И ПОДАВЛЕНИЯ | 1998 |
|
RU2150178C1 |
| СТАНЦИЯ ПРИЦЕЛЬНЫХ ПОМЕХ РАДИОЛИНИЯМ УПРАВЛЕНИЯ ВЗРЫВНЫМИ УСТРОЙСТВАМИ | 2005 |
|
RU2292059C1 |
| Приемное устройство для высокочастотной геоэлектроразведки | 1988 |
|
SU1613987A1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2000 |
|
RU2194292C2 |
Использование: геофизика и для дистанционного исследования поверхности Земли, подповерхностной структуры почв, пород, обнаружения закрытых объектов, а также повышения безаварийности движения транспортных средств и в труднопроходимых условиях и при ограниченной видимости. Сущность изобретения: устройство содержит передающий и приемный блоки, причем передающий блок включает генератор тактовых импульсов, генератор видеоимпульсов и передающему антенну, а приемный блок - генератор пилообразного напряжения, схему сравнения, формирователь строб-импульсов, приемную антенну и стробоскопический смеситель. Устройство снабжено бортовой управляющей ЭВМ, волоконно-оптической линией связи, соединяющей передающий и приемный блоки, причем передающий блок содержит блок управления, а приемный блок содержит управляющую приемным блоком микроЭВМ, ограничитель, через который приемная антенна подключена к стробоскопическому смесителю, усилитель с регулируемым коэффициентом усиления, схему выборки/хранения, аналого-цифровой преобразователь, первый цифроаналоговый преобразователь, обеспечивающий выработку медленного ступенчатого пилообразного напряжения, сравниваемого в схеме сравнения с пилообразным напряжением генератора; второй цифроаналоговый преобразователь, обеспечивающий управление усилителем с регулируемым коэффициентом усиления кодами микроЭВМ, блок управления формирователем строб-импульсов. Передающая антенна с генератором видеоимпульсов, а также приемная антенная с ограничителем и стробоскопическим смесителем интегрированы конструктивно. 1 з.п. ф-лы, 1 ил.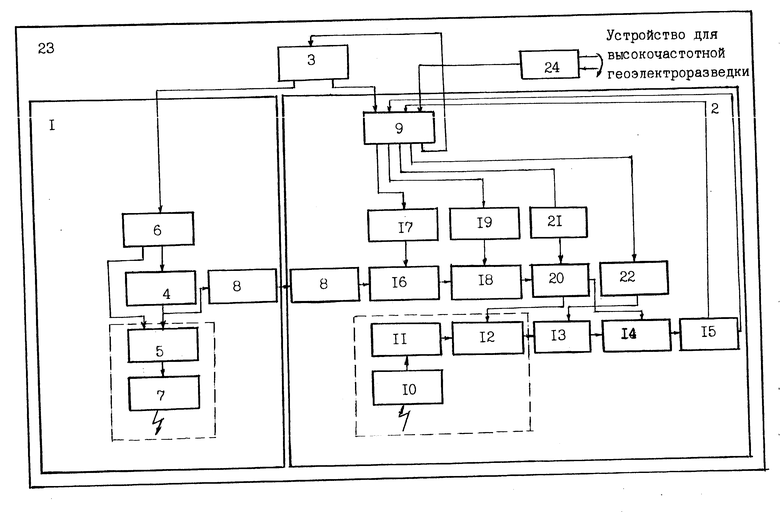
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1613587, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 995040, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
