Изобретение относится к вычислительной Texi-шке и может быть использовано для сбора и обработки данных при взаимодействии человека-оператора с ЭВМ, в частности со средствами отображения информации (дисплеями).
Цель изобретения - noBbmiemie быстродействия ввода информации в ЭВМ.
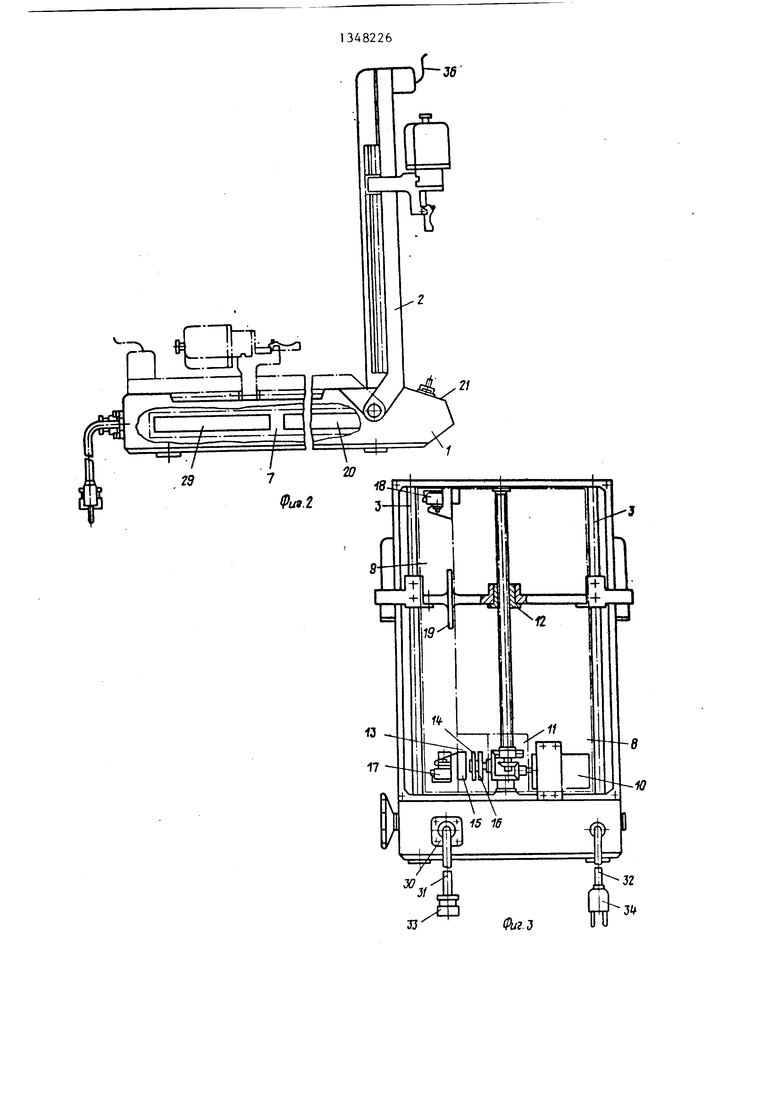
На фиг. 1 изображен пюпитр для ввода информации в ЭВМ, общий вид; на фиг. 2 - то же, вид слева; на фиг. 3 - то же, вид сзади; на фиг. 4- функциональн1 1е схемы электронного блока и панели оператора.
Пюпитр для ввода информации в ЭВМ содержит I установленное на опорно плите 1 основание 2, имеющее возможность изменения угла наклона, на задней стороне которого расположены вер- 20 равляюшлм разъемом 33.
тикапьные направляющие 3, с которыми соединена каретка 4, расположенная на лицевой стороне основания 2, содержащая узлы 5 подсветки, установленные на верхней части ее боковых сторон, и линейку 6, причем каретка 4 имеет возможность вертикального перемещения по направляющим, а также блоки 7-9 управления, автоматического перемещения каретки и ее останова. Блок В автоматического перемеигения каретки состоит из электродвигателя 10, редуктора 11, ходовой пяры нинт- гайка 12 и (Ьормирователя 13 интерпалов в пиде непрозрачного диска 14 с секторной прорезью, размещенного меж - ду лампой 15 подсветки и фотодиодом
16,жебтко соединенного с редуктором 1 1 . Блок 9 оста}1ова втслючает первый
17,второй 18 концевые переключатели и их ограш1чители 19.
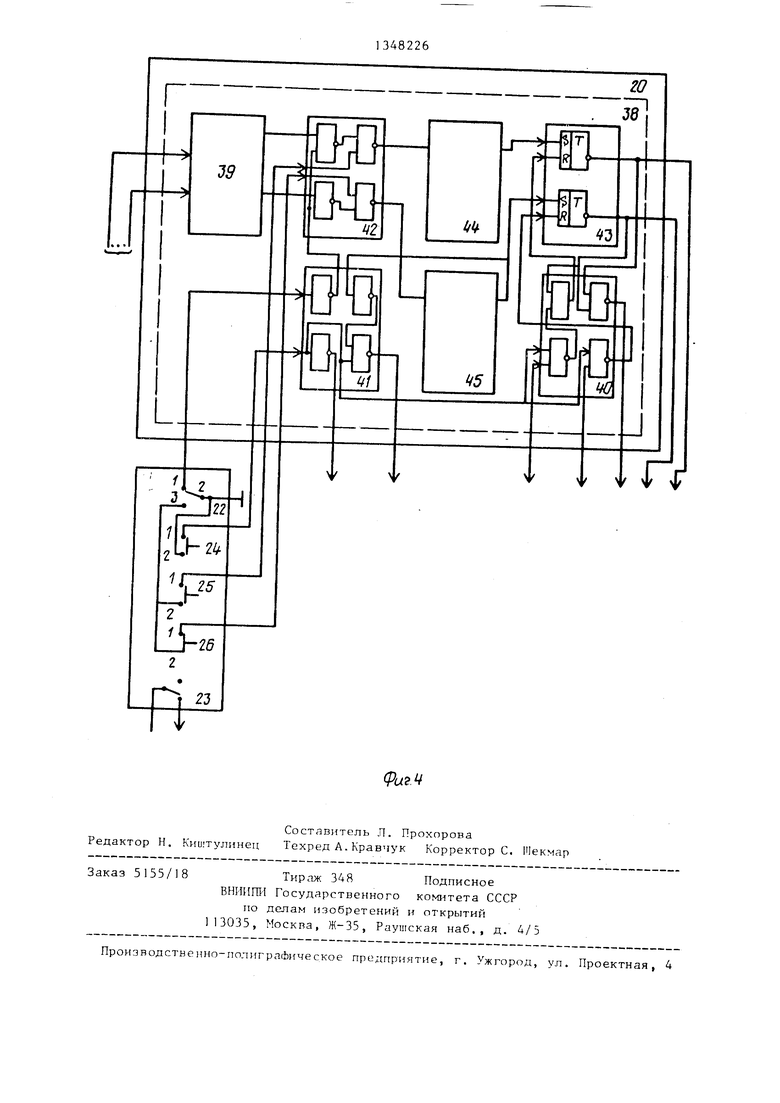
Блок 7 .управления содеряшт электронный блок 20, панель 21 оператора, с установленными на ней переключателями 22 и 23 режимов работы и освещения, кнопками 24-26 управления Нач. уст, Уст. строки, Уст. стра1шцы и счетчиками 27 и 28 строк и страниц, блок 29 питания, первый
Управляющий вход электродвигателя 10 и выход формирователя 13 интервалов соединен соответственно с выходом и входом седьмого управляющего
25 элемента 40 электронного блока 20, который выполнен в виде элемента И и трех элементов Ш1И-НЕ. Входы формирователя 13 интервалов и электродвигателя 10 соеди}1ены с блоком 29 ггита30 ния. Выходы первого 17 и второго 18 концевых переключателей блока 9 останова соединены соответственно с входом седьмого управляющего элемента 40 электронного блока 20 и
35 блоком 29 питания. Узел 3 подсветки через переключатель 23 освещения соединен с блоком 29 питания, который через соединительный кабель 32 питания соединен с разъемом 34 питания.
40 Второй и третий контакты переключателя 22 режимов панели оператора 21 со- с объединенными контактом - блока 29 гштания и вторым контактом кнопки 24 управления Нач. уст. и с
45 объединенными вторыми контактами кнопок 25 и 26 управления Уст. строки и УСТ. страницы, а первый контакт
соединен с входом пятого управляющего элемента 41. Первые контакты кно- управляющнй разъем 30, соединительные 50 пок 24, 25 и 26 управления Нач. уст, кабели 31 и 32 управ.пения и питания,. строки и Уст. страницы совторой управляюи1ий разъем 33 и разъем 34 питания. Опорная плита 1 выполнена в виде футляра, на лицевой стороне которого размещена панель 21 оператора, а внутри - блок 7 управления и основание 2 при угле его поворота, равном о. На верхней лицевой части основания 2 расположен узел
48226
35 фиксации носителя .информации, включающий пружинный держатель 36, а на его боковой стороне расположена g ручка 37 фиксации наклона основания 2.
Блоки 8 и 9 автоматического перемещения каретки ее основания размещены на задней стороне основания 2 и каретки 4.
10Электронный блок 20 соединен с
блоком 29 питания и выполнен в виде первого - седьмого управляющих элементов 35-41, объединенных печатной платой 38 соединенного через входы 15 первого управляющего элемента 39, выполненного в виде дешифратора, с первым управляющим разъёмом 30, который через соеди1штельный кабель 31 управления соединен с вторым упУправляющий вход электродвигателя 10 и выход формирователя 13 интервалов соединен соответственно с выходом и входом седьмого управляющего
элемента 40 электронного блока 20, который выполнен в виде элемента И и трех элементов Ш1И-НЕ. Входы формирователя 13 интервалов и электродвигателя 10 соеди}1ены с блоком 29 ггитания. Выходы первого 17 и второго 18 концевых переключателей блока 9 останова соединены соответственно с входом седьмого управляющего элемента 40 электронного блока 20 и
блоком 29 питания. Узел 3 подсветки через переключатель 23 освещения соединен с блоком 29 питания, который через соединительный кабель 32 питания соединен с разъемом 34 питания.
Второй и третий контакты переключателя 22 режимов панели оператора 21 со- с объединенными контактом - блока 29 гштания и вторым контактом кнопки 24 управления Нач. уст. и с
объединенными вторыми контактами кнопок 25 и 26 управления Уст. строки и УСТ. страницы, а первый контакт
единены соответственно с другим вхо- дом пятого управляющего элемента 41 и с первым и вторым входами второго 55 угтравляющего элемента 42. Первый и второй управляющие входы счетчика 27 строк соединены соответственно с первым выходом четвертого управляющего элемента 43 электронного блока 20,
который соединен Е виде двух триггеров и с первым выходом пятого управляющего элемента 41 электронного блока 20, который выполнен в виде трех элементов НЕ и элемента ИЛИ-НЕ.
Первый и второй управляю1цие входы счетчика 28 страниц соединены соответственно с вторым выходом-четвертого управляющего элемента 43 электрон- ного блока 20 и с вторым выходом пятого управляющего элемента 41 электронного блока 20. Третий и шестой управляющие элементы 44 и 45 выполнены в виде формирователей сигналов.
Пюпитр для ввода информации в ЭВМ предназначен для работы с бумажными носителями информации и работает следующим образом.
Пюпитр для ввода информаиии в ЭВМ устанавливают в положение, удобное для оператора, а основанию 2 придают с помощью ручки 37 необходимый угол наклона. Затем разъем 34 питания вклю
чают в сеть и с помощью переключателя 5 считанной страницы в ЭВМ блок 7 уп- 23 освещения и узлов 5 подсветки осуравления формирует сигнал управления электродвигателем 10, который перемещает линейку 6 под первую строку носителя информации.
ществляют при необходимости подсветку строки носителя информации, установленном на основании 2, путем откидывания линейки 6, заправки носителя информации под пружинный держатель 36 узла 35 фиксации и последующего прижатия носителя информации строковой линейкой 6 в закрытом положении. Пюпитр для ввода информации в ЭВМ может работать в двух режимах: автоматического и ручного управления. При работе в режиме автоматического управления второй управляющий разъем 33 подсоединяется к клавиатуре дисплея ЭВМ, переключатель 22 режимов устанавливается в положение Автоматическое управление и нажимается клавиш 24 управления Нач. уст.. При этом каретка 4 с линейной 6 с помощью,электродвигателя Ю устанавливается- под первой строкой носителя информации под управлением блока 7 управления и первого концевого переключателя 18 блока 9 остано- 50 логично. После ввода на экран дис- ва. В этом положении пюпитр с носителем информации готов к вводу информации в ЭВМ через дисплей. Ввод информации в ЭВМ осуществляется следующим образом. Оператор считывает строку с носителя информации и с помощью клавиатуры дисплея вводит ее на экран последнего. После ввода погшея последнего знака в последней строке оператор вводит информацию в ЭВМ и нажимает кнопку 26 управления УСТ.страницы. При этом блок 7 55 управления формирует сигнал, под уп равлением которого электродвигатель 10 перемещает лине11ку 6 под первую строку.
следнего знака в строке оператор нажимает клавишу на клавиатуре дисплея для перевода курсора на следующую строку на экране дисплея. При этом под управлением сигнала перевода курсора блок 7 управления формирует сигнал управления электродвигателем 10, который перемещает линейку 6 каретки 4 через редуктор 11 и ходовую пару винт-гайка 12 под следующую строку.
Останов линейки 6 под следующей строкой осуществляется путем останова электродвигателя 10 под .управопе- нием сигнала, вырабатываемого формирователем 13 интервалов, поступающего на блок 7 управления. Ввод после- ду юиц х строк осуществляется аналогично. После ввода последнего знака в последней строке оператор нажимает клавишу на клавиатуре дисплея для ввода считанной страницы в ЭВМ. При этом под управлением сигнала ввода ,
считанной страницы в ЭВМ блок 7 уп-
равления формирует сигнал управления электродвигателем 10, который перемещает линейку 6 под первую строку носителя информации.
30
При работе в режиме ручного управления переключатель 22 режимов устанавливают в положение Ручное управление и на з1мают клавишу 24
управления Нач.уст.. При этом каретка 4 с линейкой 6 устанавливается под первой строкой носителя информации. В этом положении пюпитр с носителем информации готов к вводу информации в ЭВМ. Ввод инАормации в
ЭВМ осуществляется следующим образом. Оператор после ввода на экран дисплея последнего знака в строке нажимает кнопку 25 управления Уст.строки.
При этом блок 7 управления формирует сигнал, под управлением которого электродвигатель 10 перемещает линейку 6 под следующую строку. Ввод последующих строк осуществляется ана50 логично. После ввода на экран дис-
гшея последнего знака в последней строке оператор вводит информацию в ЭВМ и нажимает кнопку 26 управления УСТ.страницы. При этом блок 7 55 управления формирует сигнал, под управлением которого электродвигатель 10 перемещает лине11ку 6 под первую строку.
Блокировка перемещения линейки 6 в крайнее нижнее положение ocyi;(ecT вляется с помощью ограничителя 19 и первого концевого пере1атючателя 17.
Контроль количества введеишлх в ЭВМ строк и страниц осуществляется оператором с цомощью счетчиков 27 и 28 строк и страниц, работа1ощих под управле}1ием блока 7 угфавления.
Рассмотрим работу электронно:о блока 20 блока 7 управления.
В режиме автоматического управления коды сигналов Перевод курсора и Ввод считантюй страницы Б JBM, поступающие с первого унрагшяюцего разъема 30, дешифрируются парным управляющим элементом 39. При noc i yn- лении кода сигнала Перевод курсора на выходе первого управляющего элемента 39 формируется cHrH;L i, поступающий чореп печатнл ю плату 38 на вход 1 ер}юго элемента И-ПЕ второго управляющего элемента 42, При наличии на другом входе первого элемен та И-НЕ второго управляющего элемента 42 сигнала разрещения, поступающе го с контакта - блока 29 питания, через первьп и второй контакты нере- ютючателя 22 режимов и первый элемен НЕ пятого упрат ля1оп;его элемента 41, на выходе формируется сигнал, который через первый элемент ИЛИ-НЕ второго управляющего элсмелта 42 и третий упранл нои:цй элемент 44, т Ь по1;нсн ный в виде г|юрмирователя сигналов, устанавливает первый триггер четвертого управляющего элемента 43 в единичное состояние, на первом выходе которого формируется сигнал, поступающий на нервыГг управляющий вход счетчика 27 строк и прибавляющий единицу к его содержимому. Кроме того, этот сигнал через первый элемент риТИ-НЕ седьмого управляющего элемента 40 поступает на управляющий ход электродвигателя 10, который обеспечивает перемещение лине1 ки 6 под следующую строку носителя информации.
При поступлении кода сигнала Ввод считанной страницы в ЭВМ на втором выходе первого управляющего элемента 39 формируется сигнал, поступающий через печатную плату 38 на вход второг о элемента И-НЕ второго управляюп1его элемента 42, при наличии на другом входе сигнала разрешения на выходе формируется сигнал, который через второй элемент ИЛИ-НЕ
348226°
второго управляющего элемента 42 и пятый управляющими элемент 41, выполненный в виде формирователя сигналов, устанавливает второй триггер четвертого управляющего элемента 43 в единичное состояние, на втором выходе которого формируется сигнал, посту- паюиц1й на управляющий вход электроIQ двигателя 10, который обеспечивает перемещение линейки 6 в исходное состояние, а также на первый управляю- пмй вход счетчика 28 страниц, прибав- ляюп;ий единицу к его содержимому,
15 Кроме того, этот сигнал, поступая на вход элемента И седьмого управляющего элемента 40, запрещает прохожде- сигналов на нулевой вход первого триггера четвертого управляющего эле2Q мента 43. После установки линейки 6 в исходное состояние сигнал с первого концевого переключателя 17 блока 9 останова цоступает через третий элемент ИПИ-ИЕ седьмого управляющего :- 25 элемента 40 на нулевой вход второго
триггера четвертого управляющего элемента 43, устанавливает в нулевое состояние последний и останавливает электродвигатель 10.
т 30 режиме ручного управления с помд;цью нажатия кнопки 25 управления уст.строки на первом контакте по- спедней формируется сигнал, который через первый элемент ШТИ-НЕ второго . управляющего элемента 42 и третий угфавляющяй элемент 44 устанавливает первый триггер четвертого управляю- ui.ero элемента 38 в единичное состояние, на выходе которого формируется
,jQ сигнал, под управлением которого осуществляется перемещение линейки 6 под следующую строку.
С помощью нажатия кнопки 26 управления УСТ.страницы на первом такте последней формируется сигнал,, который через второй элемент ИЛИ-НЕ второго уцравляю1:1его элемента 42 и шестой управляю1;дш элемент 45 устанавливает второй триггер четвертого
5Q управляющего элемента 43 в единичное состояние, на выходе которого формируется сигнал, под управлением которого линейка 6 устанавливается в исходное состояние.
55
Определим повышение скорости ввода информации К с использованием предлагаемого устройства по сравнению с устройством-гфототипом
к
Ь v
V, V средняя скорость ввода знаков документа для предлагаемого устройства; средняя скорость ввода знаков документа для устройства прототипа
У„
J п
п
(2)
де 1 - количество знаков в строке документа;
j - количество строк в странице документа;
п - количество страниц в документе;
t - время, затраченное на ввод одной страницы документа с использованием предлагаемого устройства.
V.
- i J
n
(3)
где t время,затраченное на ввод одной страницы документа на предлагаемом устройстве.
(
ut
-н bt
VJ
-ь t,)
Л .1 + ut
(4)
де V - скорость ввода знаков с
клавиатуры при вводе строки текста;
at - время, затраченное оператором на перевод строкоуказателя на очередную строку документа;
ut - время, затраченное оператором на смену страницы документа;
At, - время, затраченное оператором на установку строкоуказателя на первую строку документа.
vbt
(5)
С учетом вьфажений (2) - (З) формула (1) примет вид:
1 +
at j
bta
i 1
v J
(6)
J.г
U Л + t,
Из выражения (6) видно, что чем больше оператор тратит время на пере1348226
I вод строкоуказателя на очеред1гую строку Af и на подготовку к считыванию первой строки при смене стра
ницы ut, тем больше второе и третье слагаемое, а следовательно, тем выше средняя скорость ввода информации предлагаемого устро11Ства по сравнению с устройством-прототипом.
Формула изобретения
0
5
5
1.Пюпитр для ввода информации в ЭВМ, содержапщй установленное на
5 опорной плите основание, строкоуказа- тель, выполненный в виде каретки с линейкой и узлами подсветки с возможностью перемещения в направляющих, отличающийся тем, что, с целью повышения быстродействия ввода информации, в него дополнительно введены блок автоматического перемещения строкоуказателя, блок останова и блок управления, причем блок автоматического перемещения строкоуказателя содержит формирователь интерва- лов перемещения строкоуказателя и привод, электродвигатель которого связан с формирователем интер0 валов, блок останова выполнен в виде концевых переключателей, установленных на основании, и ограничителей, жестко закрепленных на каретке строкоуказателя, блок управления электрически соединен с управляющим выходом формирователя интервалов и управляющим входом электродвигателя блока автоматического перемещения строкоуказателя и с выходом блока останова.
2.Пюпитр по п. I, отличающий с я тем, что формирователь интервалов состоит из непрозрачного диска с секторной прорезью, размещенного между лампой подсветки и фотодатчиком.
3.Пюпитр по п. 1, отличающийся тем, что блок управления состоит из электронного блока и панели оператора, причем панель оператора содержит переключатели режимов работы и освещения, первую, вторую, третью кнопки управления и счетчики строк и страниц, а электронный блок выполнен в виде последовательно соединенных первого - четвертого управляющих элементов и пятого - седьмого управляющих элементов, причем входы первого управляющего элемента являются вxoдa п пюпитра, первый, второй.
0
5
0
5
третий входы и второй выход второго управляющего элемента соединены соответственно с второй, третьей кнопками управления, первым выходом пятого и входом шестого управляк 1Щ1х элементов, второй, третий, четвертый входы четвертого управляющего элемента соединены соответственно с первым
выходом седьмого управляющего элемен-IQ мента соединен с третьим входом седьта, с объединенными первым входом
пятого и выходом шестого управляю1;п1хпятый входы и третий выход которого элементов, а также с вторым выходом соединены соответственно с управляю- седьмого управляющего элемента, первыйщнм выходом формирователя интервалов, выход четвертого управляющего элемента igвыходом блока останова и управляющим соединен с объединенным первым входомвходом электродвигателя, кроме того, седьмого управляющего элемента и пер-переключатель режимов работы соеди- вым управляюп лм входом счетчика строк,нен с первой, второй, третьей кнопка- а второй выход - ,с объединенным вто-ми управления, а переключатель осве- рым входом седьмого управляю1цего эле- 2ощения соединен с узлами подсвет- мента и первым управляю11а- м входомки.
счетчика страниц, второй, третий входы и первый, второй вьгход1 1 пятого управляющего элемента соединены соответственно с переключателем режимов работы, с первой кнопкой управления, с вторыми управляющими входами счетчиков строк и стра)шц, кроме того, третий вход пятого управляющего элемого управляющего элемента, четвертый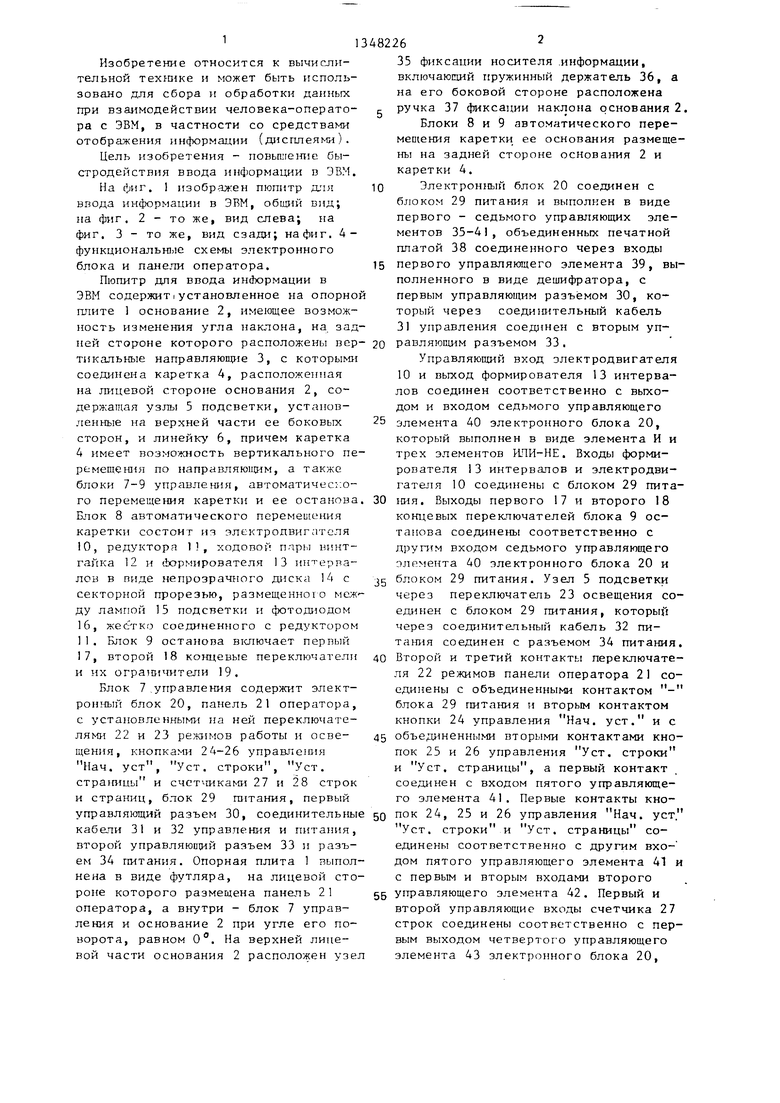

| название | год | авторы | номер документа |
|---|---|---|---|
| Подставка для носителей информации | 1982 |
|
SU1108021A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА И ЭКСПРЕСС-АНАЛИЗА СОЦИОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 1991 |
|
RU2024921C1 |
| Устройство для считывания изображений | 1984 |
|
SU1179394A1 |
| Устройство для формирования телеграфных сообщений | 1984 |
|
SU1220134A1 |
| Устройство записи информации на оконечном носителе | 1987 |
|
SU1520474A1 |
| Устройство для многоточечной сигнализации | 1982 |
|
SU1030821A1 |
| Устройство для обмена информацией междуэлЕКТРОННОй ВычиСлиТЕльНОй МАшиНОй(эВМ) и уСТРОйСТВАМи ВВОдА и ВыВОдА | 1979 |
|
SU809140A1 |
| Сканирующее устройство записи изображения | 1983 |
|
SU1170631A1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Способ защиты системы связи, система связи и устройство преобразования файлов | 2018 |
|
RU2749496C2 |
Изобретение относится к вычислительной технике и может использоваться для сбора и обработки данных при взаимодействии человека-оператора с ЭВМ, в частности со средствами отображения информации. Цель изобретения - повышение бысародействия ввода информации. Изобретение позволяет осуществлять автоматическое перемещение линейки-строкоуказателя (ЛС) от строки к строке, а также ее.установку в начальное положение по окончании считывания последней строки с носителя информации. Это достигается тем. что пюпитр для ввода инбормации в ЭВМ снабжен блоками автоматического перемещения ЛС, ее останова и управления. Автоматическое перемещение ЛС происходит под воздействием управляющего сигнала, формирующегося при нажатии оператором аТавиши клавиатуры дисплея для перевода курсора на следующую строку на экране дисплея. Автоматическая установка ЛС в начальное положение происходит под воздействием управляющего сигнала, формирующегося при нажатии оператором клавиши на клавиатуре дисплея для ввода считанной страницы в ЭВМ. Таким образом, дополнительные операции по переводу ЛС от строки к строке исключены, а необходимые перемещения ЛС осуществляются с помощью клавиатуры дисплея при вводе считанной информации в ЭВМ. В изобретении предусмотрена возможность работы в двух режимах: автоматического и ручного управления. 2 з.п. ф-лы, 4 ил. (Л со 00 to to CD
Pus.1
27
Фи,.г 3-UI
Составитель Л. Прохорова Редактор Н. Кии. тулинец Техред А. Кравчук Корректор С. Шекмар
5155/18
Тираж 348 Подписное ВНИИП11 Государственного комитета СССР
по делам изобретений и открытий 13035, Москпа, Ж-35, Раушская наб., д. 4/5
Производстненно-полигрлфическое предприятие, г. Ужгород, ул. Проектная, 4
| Подставка для носителей информации | 1982 |
|
SU1108021A1 |
| Механический грохот | 1922 |
|
SU41A1 |
