1348
янного напряжения, Блок 24 соединен с датчиками 17 н 18, а блок 15 - с блоком 24, После механической закрутки торсионов на угол, равный половине заданного, включаются блоки 24 и 25. Команда с блока 25 идет на блок 21, который вклю-чает индукторы. Образующееся магнитное поле поворачивает маховик 9. При некотором угле закрутки маховик 9 начинает вращаться в противоположную сторону. Такой
1
Изобретение относится к испытательной технике, в частности к усталостным испытаниям на кручение.
Цель изобретения - снижение трудоемкости, энергозатрат и времени запуска путем автоматизации процесса запуска и осуществления резонансного режима работы стенда на участке разгона.
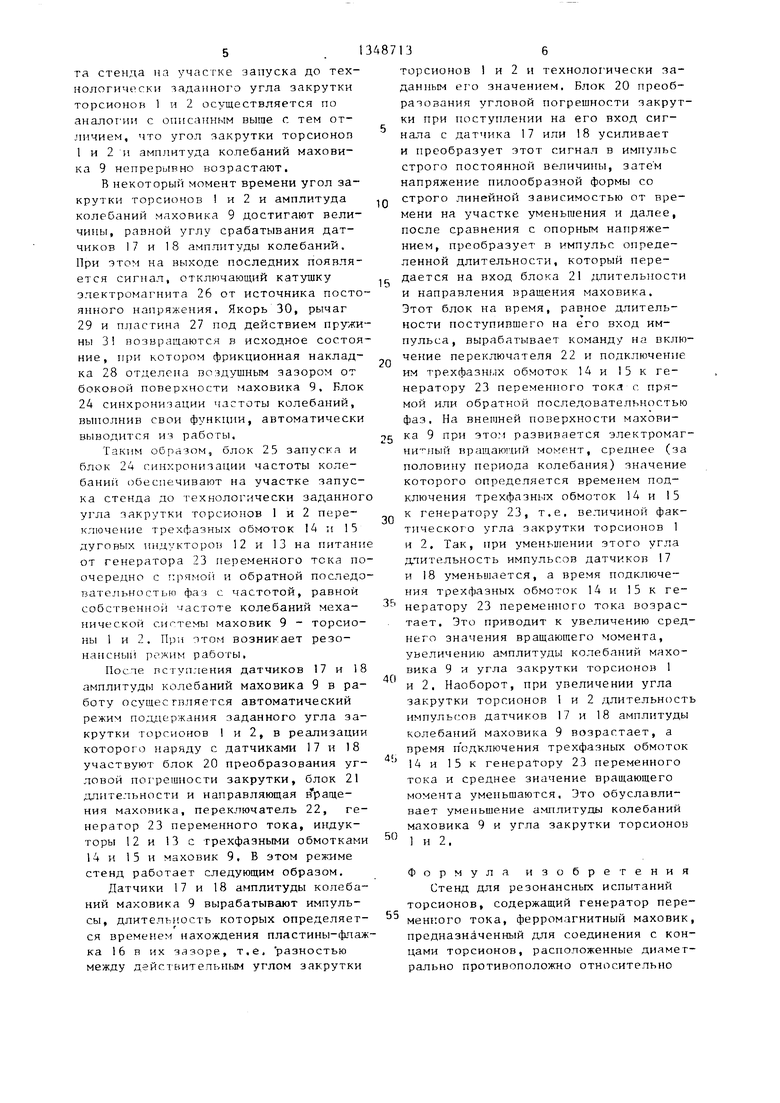
На фиг, 1 представлена блок-схема с;тенда; на фиг, 2 - один из вариантов конструктивтюго вьшолнения блока синхронизации частоты колебаний.
Стенд содержит захваты (не показаны) торсионов 1 и 2, связанные посредством муфт 3-6 с механизмом 7 и 8 для предварительного закручивания соответствующих торсионов, ферромагнитный маховик 9, предназначенный для соединения с другими концами торсионов и вращающийся в подшипниках 10 и 11, расположенные диаметрально противоположно относительно маховика 9 два дуговых трехфазных индуктора 12 и 13, на поверхности кторых, обращенных к маховику, уложены трехфазные обмотки 14 и 15. Воздушный заз(1р между индукторами и
маховиком выставляется по возможное
ти минимальным.
На маховике 9 неподвижно закреплена электропроводящая пластина-флажок 16, изготовленная из немагнитно материала и являющаяся подвижной частью датчиков 17 и 18 амплитуды колебаний маховика 9, Датчики 17 и 18 закреплены на траверсе 19, имеющей продольные прорези (не показа
13
цикл работы повторяется при непрерывно возрастающем угле закрутки торсионов. При достижении угла закрутки, равного углу срабатывания датчиков 17 и 18, блок 24 выводится из работы. Таким образом, блоки 24 и 25 обеспечивают резонансный режим работы стенда на участке запуска. После включения датчиков 17 и 18 осуществляется автоматический режим поддержания заданного угла закрутки. 2 ил.
5
то
35
0
25
ны) для установки различньпс величин технологически заданного угла закрутки торсионов 1 и 2. Выходы датчиков 17 и 18 амплитуды колебаний маховика 9 подключены к измерительной схеме, состоящей из последовательно со- соединенных с датчиками 17 и 18 блока 20 преобразования угловой погрешности закрутки торсионов, блока 21 длительности и направления вращения маховика и переключателя 22, выходом соединенного с обмотками 14 и 15 индукторов 12 и 13. Переключатель 22 имеет второй выход, который подключен к генератору 23 переменного тока. Второй и третий входы блока 21 длительности и направления вращения маховика подключены соответственно на один из выходов блока 24 синхронизации частоты колебаний и выход блока 25 запуска. Блок 24 синхронизации частоты колебаний и блок 25 запуска имеют по два входа, по одному из которых подключены к источнику постоянного напряжения (не показан). Второй вход блока 24 синхронизации частоты подключен к датчикам 17 и 18 амплитуды колебаний маховика 9, а второй вход блока 25 первоначального запуска соединен с вторьтм выходом блока 24 синхронизации частоты колебаний.
Блок 24 синхронизации частоты колебаний прикреплен неподвижно к траверсе 19 (см. фиг. 2) и конструктивно выполнен в виде электромагнита 26 постоянного тока, стальной упругой пластины 27 с фрикционной нак3 1 ладкой 28, рычага 29, соединяющего пластину 27 с якорем 30 электромагнита 26, пружины 31, ограничителей 32 и 33 и замыкающихся контактов 34 и 35.
Блок 25 запуска представляет собой RS-триггер с раздельными входами
Стенд работает следующим образом.
Посредством механизмов 7 и 8 пред варительного закручивания осуществляется закрутка торсионов 1 и 2 на одинаковые по величине, но противоположные по знаку углы, равные половине технологически заданного. Маховик 9 при этом остается неподвижным и занимает по отношению к датчику 17 и 1 амплитуды колебаний среднее положение .
Катушка электромагнита 26 блока 24 синхронизации частоты колебаний подключается к источнику постоянного напряжения. Якорь 30 электромагнита 26, преодолевая сопротивление пружины 31, притягивается. При этом фрик- ционная накладка 28 посредством рычага 29 и пластины 27 прижимается к боковой поверхности маховика 9.
Одновременно с подключением катушки электромагнита 26 к источнику гостоянного напряжения на вход S триггера блока 25 запуска подается сигнал, который переводит триггер из состояния О в состояние 1. Логическая единица при поступлении на вход блока 21 длительности и направления вращения маховика преобразуетс в этом блоке в команду, обуславливающую включение переключателя 22 для питания трехфазных обмоток 14 и 15 индукторов 12 и 13 от генератора 23 переменного тока с прямой последовательностью фаз. В воздушном зазоре отделяющем маховик 9 от индукторов 12 и 13, возбуждается бегущее магнитное поле, под действием Которого маховик 9 поворачивается, например, в направлении часовой стрелки. Вместе с маховиком 9 в направлении часовой стрелки приходит в движение фрикционная накладка 28. При этом стальная пластина 27 изгибается и замыкаех контакт 35. Величина изгиба пластины 27 и ход фрикционной накладки 28 определяются ограничителем 33,
В момент замыкания контакта 35 блок 24 синхронизации частоты колебаний вырабатывает сигнал, КОТОРЫЙ
д 15
;ji,
JQ
35
0
5
0
5
13
поступает на вход R тригг ера блока 25 запуска и возвращает его в состояние О, Дальнейшее управление процессом запуска стенда до технологически заданного угла закрутки торсионов 1 и 2 осуществляется блоком 24 синхронизации частоты колебаний.
При движении маховика 9 в направлении часовой стрелки контакт 35 остается все время замкнутым. При некотором угле закрутки торсионов 1 и 2 маховик 9 останавливается, а затем под действием упр)угих сил торсионов 1 и Z начинается его движение в обратном направлении, т.е. против часовой стрелки. Вместе с маховиком 9 против часовой стрелки перемещается фрикционная накладка 28, что обуславливает сначала размыкание ограничителя 33, а затем замь1кание контакта 34. Движение фрикционной накладки 28 и величина изгиба пластины 27 при этом определяются ограничителем 32. Размыкание ограничителя 33 приводит к появлению на выходе блока 24 синхронизации частоты колебаний сигнала, который поступает на вход блока 21 длительности и направления вращения маховика и преобразуется в команду, обуславливающую подключение переключателем 22 трехфазных обмоток 14 и 15 индукторов 12 и 13 к генератору 23 переменного тока с обратной последовательностью фаз. Направление бегущего магнитного поля индукторов 12 и 13 при этом меняется на противоположное, что вызывает изменение направления действия электромагнитного момента, действующего на махо- вик 9, и его движение против часовой стрелки. При определенном угле закрутки торсионов 1 и 2, большем предьщущего, маховик 9 останавливается, а затем под действием упругих сил торсионов 1 и 2 начинается его движение по часовой стрелке. Ограничитель 32 размыкается, а ограничитель 33 замыкается. При этом на выходе блока 24 синхронизации частоты колебаний появляется сигнал, который при поступлении на вход блока 21 длительности и направления вращения маховика преобразуется в команду, обуславливающую подключение переключателем 22 трехфазных обмоток 14 и 15 индукторов 12 и 13 к генератору 23 переменного тока с прямой последовательностью фаз. Дальнейщая работа стенда на учасгке запуска до технологически заданного угла закрутки торсионои 1 и 2 осуществляется по аналог ии с описанным выше с тем отличием, что угол закрутки торсионоп 1 и 2 и амплитуда колебаний маховика 9 непрерывно возрастают.
В некоторый момент времени угол закрутки торсионов 1 и 2 и амплитуда
колебаний маховика 9 достигают величины, равной углу срабатывания датчиков 17 и 18 амплитуды колебаний. При этом на выходе последних появляется сигнал, отключающий катушку
электромагнита 26 от источника постоянного напряжения. Якорь 30, рычаг 29 и пластина 27 под действием пружины 3 возвращаются в исходное состояние, при котором фрикционная накладка 28 отделена во: душным зазором от боковой поверхности маховика 9. Блок 24 синхронизации частоты колебаний, выполнив свои функции, автоматически выводится из работы.
Таким образом, блок 25 запуска и блок 24 синхронизации частоты колебаний обеспечивают на участке запуска стенда до технологически заданног угла закрутки торсионов 1 и 2 переключение трехфазных обмоток 14 и 15 дуговых индукторов 12 и 13 на питани от генератора 23 переменного тока поочередно с прямо) и обратной последовательностью фаз с частотой, равной собственной -гастоте колебаний меха- нической системы маховик 9 - торсио- ны 1 и 2. При этом возникает резонансный режим работы.
После потупления датчиков 17 и 18 амплитуды колебаний маховика 9 в работу осуществляется автоматический режим поддержания заданного угла закрутки торсионов 1 и 2, в реализации которого наряду с датчиками 17 и 18 участвуют блок 20 преобразования уг- ловой погрешности закрутки, блок 21 длительности и направляющая в раще- ния махоника, переключатель 22, генератор 23 переменного тока, индукторы 12 и 13 с трехфазными обмотками 14 и 15 и маховик 9, В этом режиме стенд работает следующим образом.
Датчики 17 и 18 амплитуды колебаний маховика 9 вырабатывают импульсы, длителыюсть которых определяет- ся временем нахождения пластины-флажка 16 в их зазоре, т,е, разностью между действительным углом закрутки
10
20
30
,.
I b
тс
Л- и
е
5540
136
торсионов и 2 и технолог ически заданным его значением. Блок 20 преобразования угловой погрещности закрутки при поступлении на его вход сигнала с датчика 17 или 18 усиливает и преобразует этот сигнал в импульс строго постоянной величины, затем напряжение пилообразной формы со строго линейной зависимостью от времени на участке уменьшения и далее, после сравнения с опорным напряжением, преобразует в импульс определенной длительности, который передается на вход блока 21 длительности и направления вращения маховика. Этот блок на время, равное длительности поступившего на его вход импульса, вырабатывает команду на включение переключателя 22 и подключение им трехфазных обмоток 14 и 15 к генератору 23 переменного тока с прямой или обратной последовательностью фаз. Па внешней поверхности маховика 9 при этом развивается электромаг- иращаюгдий момент, среднее (за половину периода колебания) значение которого определяется временем подключения трехфазнь х обмоток 14 и 15 к генератору 23, т.е, величиной фактического угла закрутки торсионов 1 и 2, Так, при уменьшении этого угла длительность импульсов датчиков 17 и 18 уменьшается, а время подключения трехфазных обмоток 14 и 15 к генератору 23 переменного тока возрастает. Это приводит к увеличению среднего значения вращающего момента, увеличению амплитуды колебаний маховика 9 и угла закрутки торсионов 1 и 2, Наоборот, при увеличении угла закрутки торсионов 1 и 2 длительность импульсов датчиков 17 и 18 амплитуды колебаний маховика 9 возрастает, а время пЪдКлючения трехфазньж обмоток 14 и 15 к генератору 23 переменного тока и среднее значение вращающего момента уменьшаются. Это обуславливает уменьшение амплитуды колебаний маховика 9 и угла закрутки торсионон 1 и 2,
Формула изобретения
Стенд для резонансных испытаний торсионов, содержащий генератор переменного тока, ферромагнитный маховик, предназначенный для соединения с концами торсионов, расположенные диаметрально противоположно относительно
маховика механизмы для предварительного закручивания соответствующих торсионов и дуговые трехфазные индукторы, датчики амплитуды колебаний маховика и связанную с выходами датчиков измерительную схему в виде последовательно соединенных блока преобразования угловой погрешности закрутки торсионов, блока длительности и направления вращения маховика и переключателя, второй вход которого соединен с генератором переменного тока, а выход - с индукторами, о т - лич ающийся тем, что, с целью снижения трудоемкости, энергозатрат и времени запуска путем автомати
зации процесса запуска и осуществления резонансного режима работы стенда на участке разгона, он снабжен последовательно соединенными источником постоянного напряжения, блоком синхронизации частоты колебаний и блоком запуска, выходы датчиков амплитуды колебаний соединены с вторым входом блока синхронизации частоты, второй выход которого соединен с вторым вхо-. дом блока длительности и направления вращения маховика, третий вход которого соединен с блоком запуска, второй ход которого соединен с первым входом блока синхронизации частоты колебаний.
(Риг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для резонансных испытаний торсионов | 1987 |
|
SU1427183A1 |
| Стенд для резонансных испытаний двух торсионных валов | 1982 |
|
SU1100501A1 |
| Стенд для резонансных испытаний торсионных валов | 1989 |
|
SU1656399A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ДИНАМИКИ ТРАНСПОРТНЫХ МАШИН | 1991 |
|
RU2033600C1 |
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
| Автоматический стенд для обкатки двигателей внутреннего сгорания | 1988 |
|
SU1550197A1 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА ДЛЯ ТУРБИНЫ/ГЕНЕРАТОРА ПЕРЕМЕННОГО ТОКА НА ОБЩЕМ ВАЛУ | 1997 |
|
RU2224352C2 |
| Устройство для проведения лабораторных работ по электротехнике | 1984 |
|
SU1211799A1 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР | 2012 |
|
RU2515474C2 |
| Регулируемая синхронная машина | 1977 |
|
SU729807A1 |
Изобретение относится к испытательной технике, в частности к усталостным испытаниям на кручение. Цель изобретения - снижение трудоемкости, энергозатрат и времени запуска путем автоматизации процесса запуска и осуществления резонансного режима работы стенда на участке разгона. Торсионы I и 2 связаны с механизмами 7 и 8 для их предварительного закручивания и маховиком 9. Диаметрально противоположно относительно маховика установлены индукторы 12 и 13. С маховиком связаны датчики 17 и 18 амплитуды колебаний, выходами подключенные к схеме из последовательно соединенных блока 20 преобразования угловой погрешности закрутки, блока 21 длительности и направления вращения маховика и переключателя 22, соединенного с индукторами 12 и 13 и генератором 23 переменного тока. Блок 21 соединен с блоком 24 синхронизации частоты колебаний и блоком 25 запуска, блоки 24 и 25 - с источником постоi (Л 00 4 00 со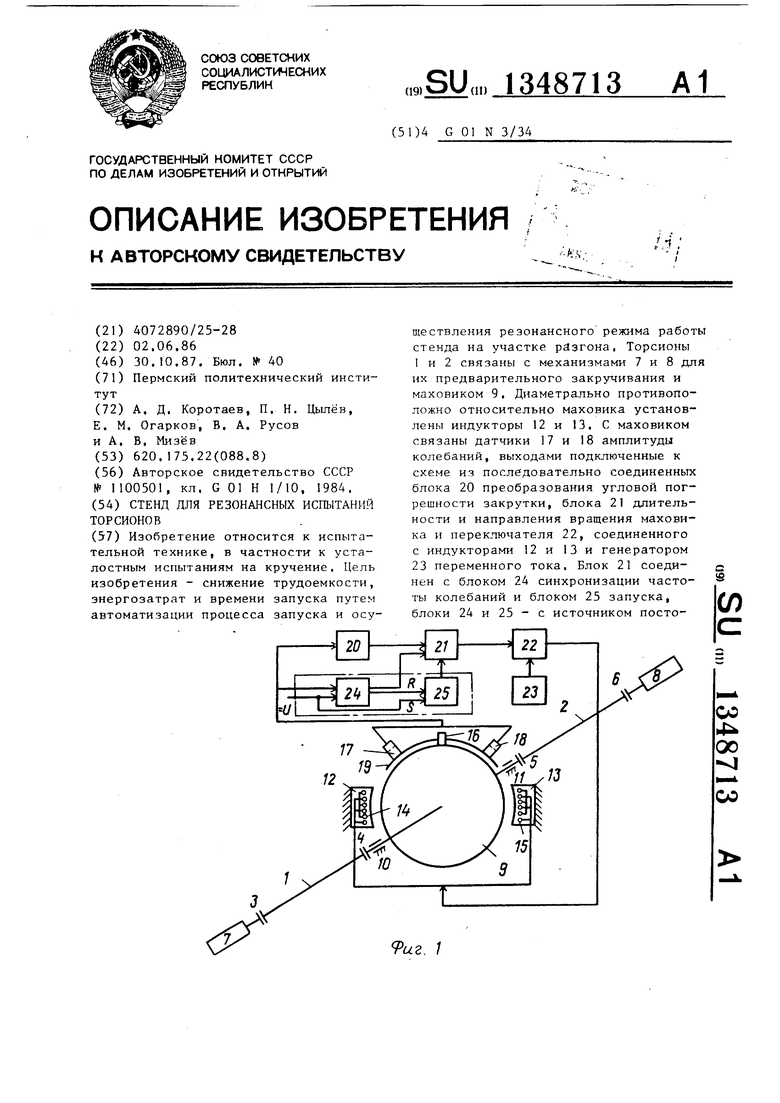
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
