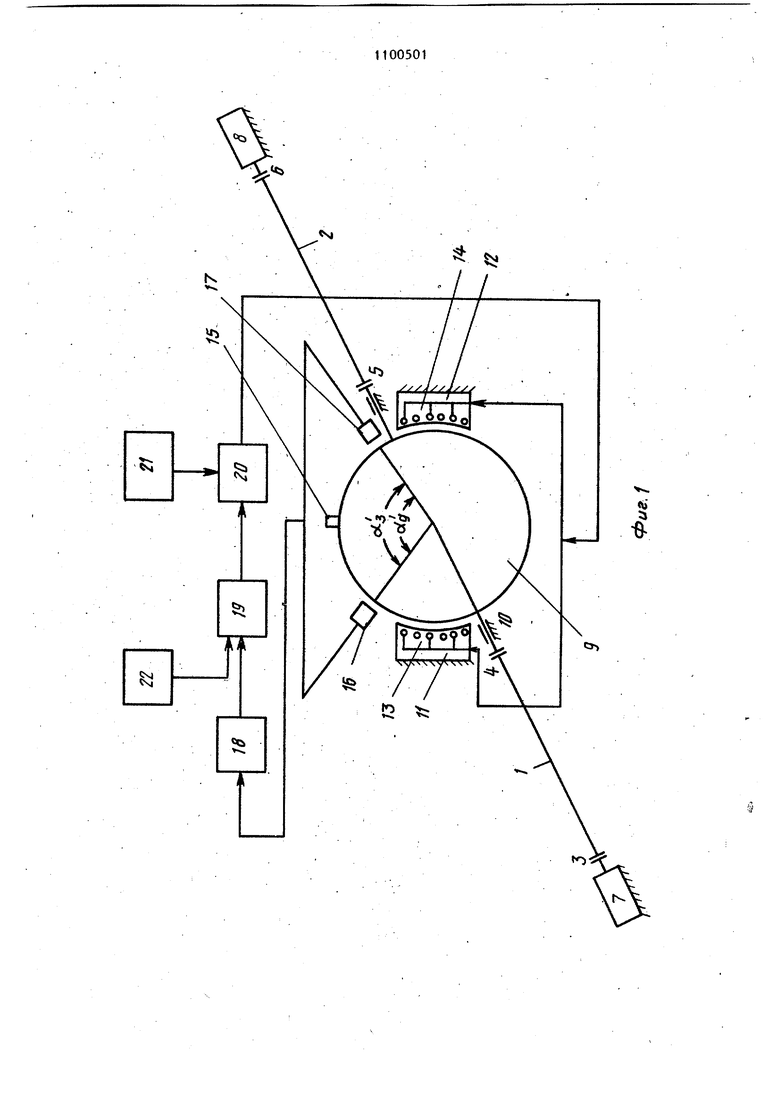
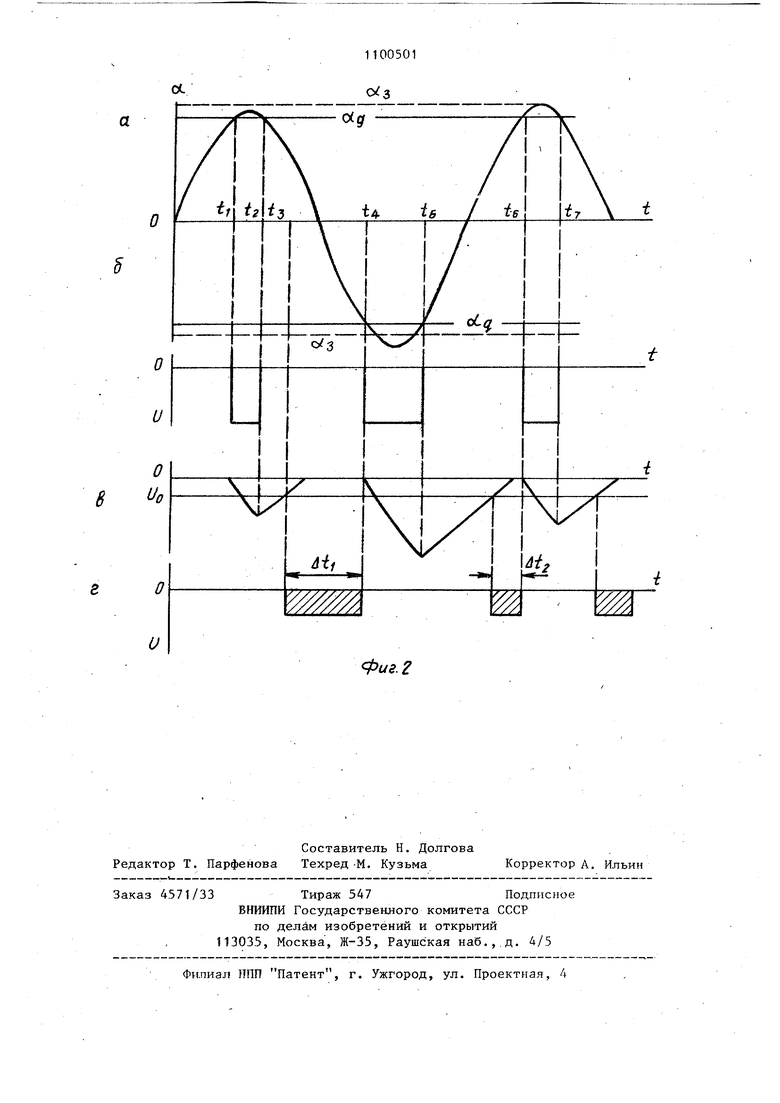
1 Изобретение относится к исполни тельной технике, а именно к стендам для усталостных испытаний на круче ние торсионных валов, собственная частота колебаний механической сис темы которых не превышает 3 Гц. На стендах осуществляют испытания торсионных валов, используемых в подвесках транспортных машин различного назначения. Известен стенд для одновременног испытания двух торсионных валов на усталость от пульсирующих и знакопеременных крутящих моментов, содержащий механизм предварительной закрутки торсионных валов в виде двух редукторов, сочлененных с электродвигателями, качающееся ко.ромысло и установленные на нем инер ционный вибратор и электрический пр вод, соединенные между собой гибкой передачей l . Недостатками стенда являются малая эффективность в области низких частот колебаний, трудность регулирования и поддержания величины амплитуды колебаний и низкая надежность работы электрического привода Наиболее близким к изобретению является стенд для резонансных испытаний двух торсионных валов, содержащий ферромагнитный маховик с приводом его угловых перемещений, два механизма предварительного закручивания испытуемых валов, вторьп концами связываемых с маковиком, датчики амплитуды колеб.аний маховика и измерительную схему С 2 J. Однако для известного стенда характерны низкая надежность работы и большая погрешность в поддержании технологически заданного угла закрутки торсионных валов. Первый недостаток обусловлен наличием в стен де большого числа вращающихся и.дви жущихся по сложным траекториям звеньев, их частыми поломками и быстрым износом. Второй недостаток объясняется значительной инерционностью регулятора амплитуды колебаний. Цель изобретения - повышение надежности и точности поддержания амплитуды колебаний торсионных валов. Поставленная цель достигается тем, что в стенде для резонансных испытаний двух торсионных валов, содержащем ферромагнитный маховик 012 с приводом его угловых перемещений, два механизма пpeдвapитeлFJHoгo закручивания испытуемых валов, вторыми концами связываемых с маховиком, датчики амплитуды колебаний маховика и измерительную схему, привод угловых перемещений маховика выполнен в виде двух индукторов с трехфазЛми обмотками, установленных диаметрально .относительно маховика, измерительная схема выполнена в виде . последовательно соединенных с датчиками блока преобразования угловой погрешности, блока длительности и направления поля и переключателя, выходом соединенного с обмотками индукторов, а также генератора переменного тока, подключенного к второму входу переключателя, и генератора импульсов, подключенного к второму входу блока длительности. На фиг. 1 представлена блок-схема стенда; на фиг. 2 - временные диаграммы, поясняющие работу стенда. В стенде два испытуемых торсионных вала 1 и 2 соединены посредством муфт-адаптеров 3-6 с механизмами 7 и 8 предварительного закручивания и валом массивного маховика 9, выполненного из ферромагнитного материала и вращающегося в подшипниках 10 (второй на чертеже не показан). С противоположных сторон маховика 9, диаметрально охватывая часть его внешней окружности, уртановлены два дуговых индуктора 11 и 12, на поверхности которых, обращенной к маховику 9, уложены трехфазные обмотки 13 и 14. Воздушный зазор между индукторами .11 и 12. и маховиком 9 минимален. На маховике 9 неподвижно закреплена электропроводящая пластина-флажок 15, изготовленная из немагнитного металла. На траверсе (на чертеже не показана) выполняются прорези для возможности установки различных значений техЕюлогически заданного угла о закрутки торсионных валов 1 и крепятся датчики 16 и 17 амплитуды колебаний маховика 9, подключенные к измерительной схеме состоящей из последовательно соединенных с датчиками 16 и 17 блока 18 преобразования угловой погрешностиj блока 19 длительности и направления поля и переключателя 20, выходом соединенного с обмотками 13 и 14 индукторов 11 и 12, ко второму входу 3 переключателя 20 подключен генерато 21 переменного тока, а ко второму входу блока 19 длительности - генератор 22 импульсов. Стенд работает следующим образом Посредством механизмов 7 и 8 предварительного закручивания осуществляется закрутка торсионных валов 1 и 2 на равные по величине, но противоположные по знаку углы . Маховик 9 при этом остается неподвижным и занимает по отношению к датчикам 16 и 17 амплитуды среднее положение. Включается генератор 21 импульсо частота следования которьк задается равной собственной частоте колебаний механической системы маховик 9 торсионные валы 1 и 2. При этом на вход блока 19 длительности и направ ления поля индукторов 11 и 12 поступает сигнал, преобразующийся в команду, обуславливающую включение переключатели 20 для питания трехфа ных обмоток 13 и 14 индукторов 11 и 12 с прямой последовательностью фаз питающей сети переменного тока. 8воздушном зазоре, отделяющем маховик 9 от индукторов 11 и 12, возбуждается бегутцее магнитное поле, под действием которого маховик 9 по ворачивается, например, в направлении часовой стрелки. По прошествии некоторого времени с выхода генератора 22 импульсов на вход блока 19 длительности поступает второй импульс . Блок 19 длительности при этом выдает команду на включение переключателя 20 с обратной последо вательностью фаз питающей сети переменного, тока . Возникающий при это электромагнитный момент изменяют направление своего действия, и махо вик 9 начинает движение против часо вой стрелки. Таким образом, на валу маховика 9действует знакопеременный электро магнитный момент, изменяющий направ ление действия с частотой, равной собственной частоте колебаний механической системы маховик 9 - торсионные валы 1 и 2. В результате амплитуда колебаний маховика 9 и угол ci закрутки торсионных валов i и 2 возрастают и .в некоторый момент времени достигают величины cL сраба тывания датчиков 16 и 17, значение которой должно выбираться несколько 01 .4 меньш 1м технологически заданного угла cij. При этом вступают в действие датчики 16 и 17 амплитуды и блок 18 преобразования угловой погрешности, при этом генератор 22 отключается. Положительным значением угла ot (фиг. 2а) соответствует движение маховика 9 против часовой стрелки, отрицательным - в направлении часовой стрелки, пунктирными и сплошными горизонтальными линиями показаны значения заданного угла otj закрутки и угла с, срабатывания датчиков 16 и 17 амплитуды. Пластинафлажок 15 в момент времени -Ь вхо- дит в зазор датчика 16, а в момент времени -Ь - выходит из зазора. На выходе датчика 16, при этом появляется импульс, длительность которого (t т) определяется временем наховдения пластины-флажка 15 в за зоре, т.е. разностью значений () Данный импульс поступает на вход блока 1В преобразования (фиг. 25-г) . Блок 18 преобразования при поступлении на его вход сигнала с датчика 16 усиливает и преобразует этот сигнал в импульс строго постоянной величины (фиг. 25), затем в напряжение пилообразной формы со строго линейной зависимостью от времени на участке уменьшения (фиг. 2в) и далее после сравнения с опорным напряжением U преобразует В-импульс длительностью л-Ь (фиг. 2г), поступающий на вход блока 19 длительности. Этот блок на время, равное д-t, вырабатывает команду на . включение переключателя 20 и подключение трехфазных обмоток 13 и 14 к питающей сети переменного тока с обратной, по отнощению к предыдущему подключению, последовательностью фаз. На внешней поверхности маховика 9 при этом развивается электромагнитный вращающий момент, обуславливающий движение его в обратном направлении, т.е. по часовой стрелке. Двигаясь в этом направлении, маховик 9 в момент времени t4(фиг. 2а) займет положение, при котором пластина-флажок 15 окажется в зоне действия датчика 17 амплитуды. В этот момент блок 19 длительности вырабатывает команду на отключение переключателя 20, что приводит к отключению трехфазных обмоток 13 и 14 от питающей сети переменного тока. Вращающий момент, прикладываемой к маховику 9, при этом становится равным нулю. Однако маховик 9 продолжает двигаться по инерции, в ре зультате чего угол закрутки оС торсионных валов 1 и 2 возрастает и достигает значения, большего технологически заданного угла .Ia В этот момент маховик 9 останавливается, а затем под действием упругих сил начинает движение против ча сой стрелки. При маховик 9 займет положение, соответствующее выходу пластины-флажка 15 из зоны действия датчика 17. Следовательно общее время нахождения пластиныфлажка 15 в зоне действия датчика равно () и определяется раз- ностью действительного угла с закрутки торсионных валов 1 и 2 и угла оСд срабатывания датчика 17, т.е величиной Ло(). В блоке 18 преобразования импульс с выхода дат чика 17 длительностью () преобразуется в управляющий сигнал длительностью . 2г), который через блок 19 длительности включает переключатель 20. Обмотки 13 и 14 подключаются к питающей сети переменного тока с обратной, по отношению к предьщущему подключению, последовательностью фаз. Направление бегущего магнитного поля индукторов 11 и 12 при этом изменяется на противоположное, что обуславливает изменение знака вращающего момента и реверс маховика 9. В дальнейшем работа стенда повторяется. 16 Длительность нахождения трехфаз- . ных обмоток 13. и 14 под напряжением зависит от длительности импульсов датчиков 16 и 17, т.е. от величины действительного угла закрутки торсионных валов 1 и 2 (фиг. 2). При уменьшении этого угла длительность импульсов датчиков уменьшается, а время подключения трехфазных обмоток к питающей сети переменного тока возрастает. Это приводит к увеличению среднего (за половину периода колебаний) значения вращающего момента и увеличению угла поворота маховика 9 и торсионных валов 1 и 2. Действительный угол d меньше заданного о6(фиг. 2). При этом длительность импульса составляет (, а время подключения обмоток 13 и 14 к сети переменного тока Л-Ь , При повороте маховика 9 по часовой стрелке действительный угол oi превьшает заданный otj. Это приводит к увеличению длительности импульса до значеНИН (tg- -4:4) уменьшению времени подключения обмоток к питающей сети до величины Л-Ь и снижению среднего значения .вращающего момента. В результате этого действительный угол закрутки торсионных валов 1 и 2 уменьшается и достигает значения, равного заданному углу закрутки. Использование предлагаемого стенда позволяет надежно с достаточно высокой точностью автоматически поддерживать заданный угол оС закрутки торсионных валов и тем самым обеспечить высокое качество и достоверность испытаний.
фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для резонансных испытаний торсионов | 1987 |
|
SU1427183A1 |
| Стенд для резонансных испытаний торсионов | 1986 |
|
SU1348713A1 |
| Стенд для резонансных испытаний торсионных валов | 1989 |
|
SU1656399A1 |
| Автоматический стенд для обкатки двигателей внутреннего сгорания | 1988 |
|
SU1550197A1 |
| Маховик-ротор электромагнитного возбудителя колебаний стенда испытания образцов на усталость при кручении | 1981 |
|
SU962694A1 |
| Устройство для определения технического состояния нагнетателя | 1989 |
|
SU1638595A1 |
| СПОСОБ КВАЗИЧАСТОТНОГО МЯГКОГО ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2277289C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ДИНАМИКИ ТРАНСПОРТНЫХ МАШИН | 1991 |
|
RU2033600C1 |
| Способ испытания торсионных валов на усталость и стенд для его осуществления | 1989 |
|
SU1735734A1 |
| Стенд для испытаний зубчатых передач | 1959 |
|
SU145039A1 |
СТЕНД ДЛЯ РЕЗОНАНСНЫХ ИСПЫТАНИЙ ДВУХ ТОРСИОННЬК ВАЛОВ, содержащий ферромагнитный маховик с приводом его угловых перемещений, два ме ханизма предварительного закручивания испытуемых валов, вторыми концами связываемых с маховиком, датчики амплитуды колебаний маховика и измерительную схему, отличающийся тем, что, с целью повышения надежности и точности поддержания заданной амплитуды колебаний, привод угловых перемещений маховика выполнен в виде двух индукторов с трехфазньми обмотками, установленных диаметрально относительно маховика, измерительная схема вьшолнена в виде последовательно соединенных с датчиками блока преобразования угловой погрешности, блока длительности и направления поля и переключателя, выходом соединенного с обмотками индукторов, а также генератора пере(Л менного тока, подключенного к второму входу переключателя, и генератора импульсов, подключенного к второму входу блока длительности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стенд для испытания торсионных валов на усталость | 1976 |
|
SU626389A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Стенд для испытания торсионных рессор на усталость | 1956 |
|
SU107286A1 |
