(54) РЕГУЛИРУЕМАЯ СИНХРОННАЯ МАШИНА
1
Изобретение относится к электро-технике, а именно к синхронным электрическим машинам и их системам регулирования.
Изобретение может быть использовано в системах возбуждения и компаундирования синхронных генераторов, в частности в системах возбуждения асинхронизированных синхронных машин .
Известны синхронные машины с устройстваули для регулирования возбуждения.
Одна из известных синхронных машин содержит неподвижный индуктор с двумя одинаковыми вращающимися в разные стороны с одинаковой скоростью один в другом якорями, причем обмотки соответствующих фаз обоих якорей соединены последовательно с помощью контактных колец и щеток. В этой машине автоматически скомпенсирована поперечная реакция якоря, индуктор разгружен от момента, и мощность удвоена в соответствии с числом якорей 1.
Недостатком этой машины является то, что продольная реакция якоря остается нескомпенсированной, а наличие вращаюиоихсн оОмоток и сКользяНИХ контактов ними приводит к снижению надежности.
Известна другая синхронная машина, на роторе которой расположены компенсационная обмотка и сверхпроводящая обмотка розбуждсния.Компенсационная обмотка представ.пяет собой якорную обмотку постоянного тока, присоединенную к коллектору. Якор10ная обмотка переменного тока расположена на статоре. Концы фаз этой обмотки присоединены к щеткам, установленным на коллекторе под углом 120 эл. град, друг к другу в та15ком положении, что волны первой гармоники МДС обмотки якоря (статора) и компенсационной взаимно компенсируют друг друга 2.
Это устройство позволяет осуществлять компенсацию поля реакции якоря, но имеет существенный |недостаток - коллектор, комментирующий переменный ток.
Наиболее близким по технической
25 сущности и достигаемом;. результату к изобретению является регулируемая синхронная машина с обмоткой возбуждения холостого хода и с продольной и поперечной компенсационными обмотками возбуждения, подключенными к
регулирующему устройс- ву, соединенном с однофазными трансформаторами тока и содержащему управляемые вентили и блоки управления ими, состоящие из диодов и многообмоточных трансформаторов, первичные обмотки которых подключены к датчику положения ротора, выполненному с числом фаз, равным числу фаз синхронной машины и установленному синфаэно на валу ротора машины 3.
Регулирование электрической машины осуществляется при помощи изменения напряжений на указанных обмотках пропорционально частоте скольжения. Для этого формируют сигналы, пропорциональные составляю1иим токов якоря по продольной ( i QJ) поперечной (ic) осям ротора и индуктивному сопротивлению рассеяния обмотки якоря, а затем в зависимости от величи указанных сигналов регулируют напряжения обмоток возбуждения.
В соответствии с этим трехфазная система токов якоря преобразуется в двухфазную при помощи параллельного включения вторичных обмоток трансформаторов тока в двух фазах. Затем методами и устройствами аналоговой электроники полученные два выходных тока умножаются на фазные ЭДС двухфазной углоизмерительной машины, после чего полученные величины суммируются и усиливаются.
Недостатком этого устройства является сложность систе у1ы возбуждения, обусловленная тем, что необходит ий сигнал управления (весьма сложной структуры) сначала лишь формируется, а затем усиливается мощными усилителями, имеющими значительную массу и габариты, а. также неприспособленность для работы при несимметричной нагрузке фаз и невозможность компенсации инверсных полей, так как надлежащие значения составляющих токов якоря по продольной и поперечной осям ротора здесь могут быть выделены только при симметричной нагрузке фаз якоря
Цель изобретения - повышение качества регулирования, увеличение синхронизирующего момента и упрощение системы регулирования.
Это достигается тем, что в регулируемой синхронной машине каждая компенсационная обмотка снабжена группой мостовых реверсивных переключателей, число которых в группе равно числу фаз машины, выходы переключателей в группе соединены параллельно, а входы соединены со вторичными oUNiOTKaMH трансформаторов тока, причем выходы вторичных обмоток трансформаторов блоков управления переключателями выполнены попарно разнополярными, а цепи управления переключателей подсоединены к раэнополярным выходам указанных
трансформаторов. Кроме того, выходные обмотки трансформаторов блока управления переключателями, соединенным5- с компенсационной обмоткой, расположенной по продольной оси,могут быть подключены к линейным выводам обмоток датчика положения ротора, а входные обмотки трансформа-торов блока управления переключателями, соединенными с компенсационной обмоткой, расположенной по поперечной оси:, подключены к фазным выводам обмоток датчика положения ротора. ПарешлельнЪ выходу и входу каждой из групп .реверсивных переключателей установлены фильтры низкой частоты. С
целью уменьшения влияния продольной компенсационной обмотки на обмотку возбуждения холостого хода в динамических режимах устройство может быть
0 снабжено трансформатором с воздушным зазором, первичная обмотка которого включена последовательно с продольной компенсационной обмоткой, а вторичная - последовательно в цепь
5 обмотки возбуждения холостого хода.
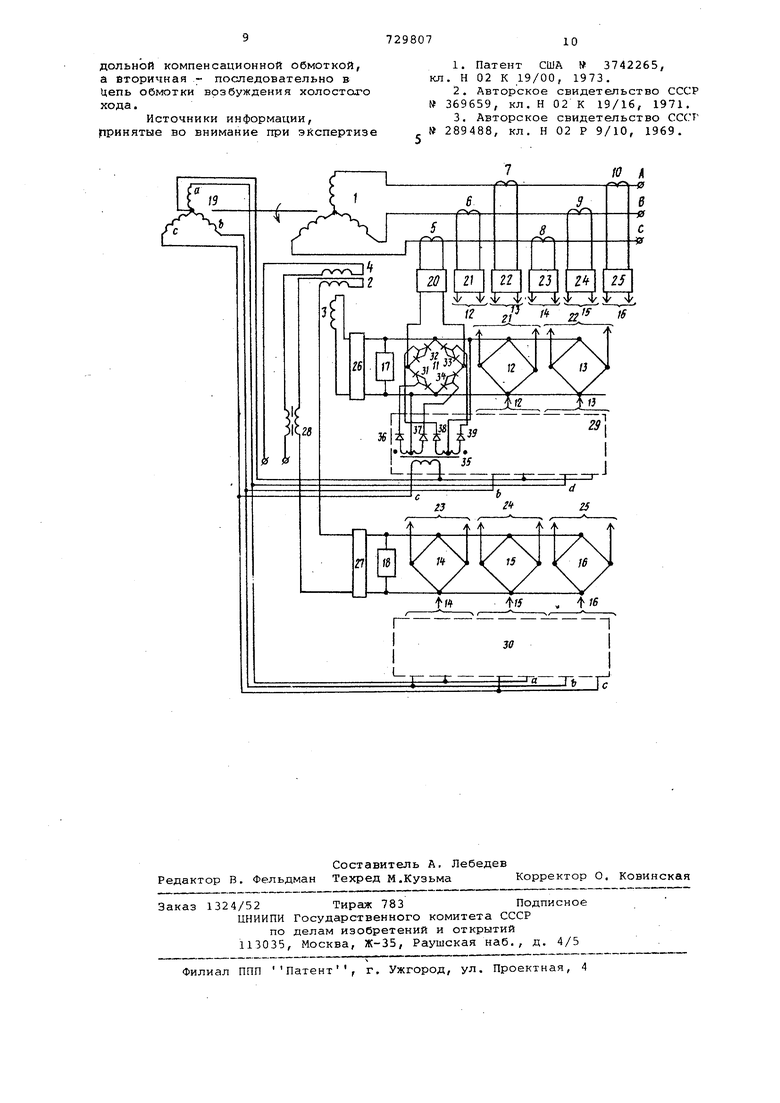
На чертеже представлена принципиаг)ьная электрическая схема регулируемой синхронной машины.
Трехфазная синхронная машина содержит обмотку 1 якоря, продольную 2 и поперечную 3 компенсационные обмотки возбуждения, обмотку 4 возбуждения холостого хода, однофазные трансформаторы тока 5-10 в цепи якоря, реверсивные мостовые переключатели 11-16, блоки 17 и 18 принудительной коммутации, датчик 19 положения индуктора, входные фильтры 20-25 высших гармоник тока, выходные фильтры 26 ;i 27 высших гармоник тока, развязывающий трансформатор 28, блоки 29 и 30 управления реверсивными переключателями. Реверсивные мостовые переключатели 11-16 выполнены, в частности, на симисторах 31-34. Блоки управления переключателями включают в себя по три ячейки, каждая из которых построена на трансформаторе 35 и диодах 36-39, а в качестве датчика положения индуктора используется трехфазный углоизмерительный генератор, причем ЭДС его фаз а, 8, с синфазны соответствующим ЭДС фаз А, В, С мащины.
Элементы схема соединены следующим образом.
Фазы обмотки якоря 1 подключены к линейным зажимам машины к фазам А, В, С через две группы однофазных трансформаторов тока 5-7 и 8-10. Вторичные обмотки трансформаторов тока 5-7 соединены с входами входных фильтров 0-22, выходы которых присоединены к входам переключателей 11-13. Выходы переключателей 11-13 соединены параллельно с блоком 17 и выходным фильтром 2fi, ко-торый своими выходными Зс1жимами подключен к поперечной компенсацион ной обмотке 3. Управляющие электроды симисторов переключателей 11-13 подключены к выходам ячеек блока 29 Ячейка управления реверсивным переключателем 11 построена следующим образом. Управляющие электроды симисторов 31-34 переключателя II присоединены через диоды 36-39 к вторичным обмоткам трансформатора 35, первичная обмотка которого включена на клегу мы фазы С датчика 19. Реверсивные мостовые переключатели 12 и 13 подключены к аналогичным ячейкам управления, входы которых подключены к фазам и Я. датчика 19. Трансформаторы тока 8-10 присоединены через входные фильтры 23-25 к входам переключателей 14-16, выходы которых соединены параллельно с блоком принудительной коммутации 18 и входом выходного фильтра 27. Выход фильтра 27 подключен к продольной -компенсационной обмотке 2 через первичную обмотку развязывающего трансформатора 28,вторичная об мотка которого соединена последовательно с обмоткой 4.Управляющие эле троды симисторов переключателей 14подключены к выходам ячеек блока 30 каждая из которых построена аналоги но ячейке управления переключателем 11, описанным выше. Первичные обмот ки трансформаторов ячеек управления переключателями 14-16 подключены к линейным Эспкимам датчика 19, а имен но к зажимам 0,6, Q.C, с соответствеяно. В случае нецелесообразности или невозможности выполнения в Мсшшне поперечной компенсационной обмотки возбуждения (явнополюсных, бесконтактных машинах с когтеобразным или индукторным ротором) или в случае отсутствия необходимости регулирования потока возбуждения по продольной оси, регулирующее устрой ство выполняется с одной группой реверсивных мостовых переключателей присоединенных к продольной или поперечной компенсационным обмоткам соответственно. Следовательно,при выполнении машины трехфазной, токи в продольной (1ц ) и поперечной () компенсационных обмотках возбуждения равны (за начало отсчета времени принят момент времени, когда продольная ось индуктора совпадает с осью фазы А обмотки якоря) : 4(3 Vsigrn cosu t ig5(.(u)i-) + tcsig-n cc«(),(I 7 И-V f Ч B e s Ч -f ) -1 & епЬАп(ш1- ), где lo , ig, и Q - мгновенные значения токов в фазах обмотки якоря. Если коэффициенты трансформации () тpaнcфop aтopoв тока, к которым подключено регулирующее S CTройстЕО, выбраны равныьот 3/2. 4/Л-, (амплитуда первой гармоники единичной прямоугольной функции равна 4/Jt) , то постоянные составляющие и вторые гармоники токов в компенсационных обмотках возбуждения будут равны аг алогичныг составляюищм токов, описанным управлениями Блондел я V- ) ) ( 3) y-fHA,(( Высшие же гармоники токов при необходимости могут быть удалены или ослаблен отфильтрованием. Регулируемая синхронная машина работает следуюш,им образом. Вторичные токи трансформаторов 5-10, образующиеся при нагрузке машины, протекают через фильтры 20-25, где отфильтровываются внаине гармоники токов, затем поступает на группы реверсивных мостовых переключателей 11-13, и 14-16, количество которых в каждой группе равно числу фаз машины и выходы которых соединены параллельно, и далее через выходные фильтры 26 и 27, где отфильтровываются гармоники токов выше второй,на поперечную 3 ii продольную 2 компенсационные обмотки возбуждения соответственно. В случае, если необходимо обеспечить компенсацию инверсного поля якоря, эти фильтры расчитываются так, чтобы гармоника удвоенной частоты (сравнительно с частотой цепи якоря) мало искажалась по амплитуде и фазе. Управляющие электроды симисторов 31-34 переключателей 11-13, присоединены через диоды 36-39 и трансформаторы 35 блока 29 к фазам датчика 19, осуществляют попеременное включение симисторов 31, 33 и 32, 34 противоположных плеч моста в моменты равенства нулю мгновенных значений соответствующих фазных ЭДС . машины. Епок 17 при этом гасит симисторы 32, 34 или 31f 33 соответственно. Cyf.&tapHHfi ток на выходе группы реверсивных переключателей 11-13, поступающий в компенсационную обмотку 3, пропорционален или, при соответствующем выборе коэффициентов трансформации трансформаторов тока
5-7, равен составляющей токов якоря по поперечной оси индуктора машины.
Формирование тока в компенсационной обмотке 2, пропорционального или равного составляющей токов якоря по продольной оси индуктора машины, осуществляется аналогичным образом путем суммирования токов переключателей 14-16 переключение которых с одной полярности на другую в данном случае осуществляется в те моменты, когда мгновенные значения соответствующих фазных ЭДС машины принимают максимальные значения. При этом трансформаторы блока 30 получают питание от линейных напряжений датчика 19 и указанные переключения коммутаторов происходят в моменты равенства нулю их мгновенных значений .
Развязывающих трансформатор 28 (с воздушным зазором) при динамических режимах нагрузки машины компенсируют влияние продольной обмотки 2 на обмотку возбуждения холостого хода 4, связанных взаимоиндуктивно магнйтопроводом машины.
Трансформатор в. оптимальном случае настроен так, чтобы при изменении тока нагрузки генератора изменение потокосцепления всей цепи обмотки 4 было минимальным.
При надлежащем выборе коэффициентов трансформации трансформаторов тока 5-10 или числа витков в обмотках возбуждения 2 и 3 поле реакции якоря может быть полностью скомпенсировано, в том числе и при несимметричной нагрузке машины. При этом переходные процессы в цепях якоря и индуктора будут практически развязаны.
Положительный эффект заключается в существенном упрощении машины при непосредственном получении моющих сигналов для воздействия на обмотки возбуждения, повышении пределов статической и динамической устойчивости машины в условиях несимметричных нагрузок, сокращении длительности переходных процессов, повышении точности регулирования, а также в уменьшении потерьот инверсных полей.
Упрощение устройства приводит к замене дорогостоящих блоков аналоговой электроники на значительно более дешевые (в 10-20 раз) силовые тиристорные элементы.
Формула изобретения
1. Регулируемая синхронная машина с обмоткой возбуждения холостог хода, продольной и. поперечной компенсационными обмотками возбуждени подключенны и к регулирьюшему устройству соединеннo 1y с однофазным трансформаторами тока, содержащему
управляемое вентили и блоки управления, состоящие из диодов и многообмоточных трансформаторов, первичные обмотки которых подключены к датчику положения ротора, выполненному с числом фаз, равным числу фаз синхронной машины и установленному синфазно на валу ротора, машигны, отличающаяся
тем.
что, с цепью.повышения качества регулирования, увеличения синхронизирующего момента и упрощения систег регулирования, кеьждая компенсационная обмотка снабжена группой мостовых геверсивных переключателей число которых в группе равно числу фаз машины, выходы переключателей в группе соединены параллельно, а входы соединены со вторичными обмотками трансформаторов тока, причем выходы вторичных обмоток трансформаторов блоков управления переключателями выполнены попарно разнополярными, а цепи управления переключателей подсоединены к разнополярным выходам указанных трансформаторов.
2.Регулируемая синхронная машина по п. 1, отличающаяся тем, что входные обмотки трансформаторов блока управления переключателями, соединенные с компенсационной обмоткой, расположенной по продольной оси, подключены к линейным выводам обмоток датчика положения ротора, а входные обмотки трансформаторов блока управления переключателями, соединенныг ш с компенсационной обмоткой, расположенной по поперечной оси, подключены к фазным выводам обмоток датчика положения ротора.
3.Регулируемая синхронная машина по пп. 1и2, отличающаяся тем, что между компенсационными обмотками возбуждения и выходами групп реверсивных переключателей включены фильтры низких частот.
4.Регулируемая синхронная машина по пп. 1, 2иЗ, отлича ющ а я с я тем, что, с целью повышения точности при несинусоидальных токах фаз, между трансформаторами тока и входами групп реверсивных переключателей включены фильтры низких частот.
5.Регулируемая синхронная машина по пп. 1,2,3 и 4 , отличающаяся тем, что, с целью уменьшения влияния продольной компенсационной обмотки на обмотку возбуждения холостого хода в динамических режимах, синхронная машина снабжена трансформатором с воздушны зазором, первичная обмотка которого включена послеловательно с продольной компенсационной обмоткой, а вторичная - последовательно в Цепь обмотки возбуждения холостого хода.
Источники информации, 1ринятые во внимание при экспертизе
1.Патент США 3742265, кл. Н 02 К 19/00, 1973,
2.Авторское свидетельство СССР № 369659, кл. Н 02 К 19/16, 1971.
3.Авторское свидетельство CCCI 289488, кл. Н 02 Р 9/10, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Синхронная @ -фазная машина с устройством для измерения продольной и поперечной составляющих токов или напряжений | 1980 |
|
SU888325A1 |
| Способ получения составляющей многфазной системы токов или напряжений электрической машины | 1975 |
|
SU661707A1 |
| Электропривод | 1985 |
|
SU1277346A1 |
| Система возбуждения асинхронизированной электрической машины | 2016 |
|
RU2642488C1 |
| СИСТЕМА ФОРСИРОВКИ ВОЗБУЖДЕНИЯ АВТОНОМНОГО СИНХРОННОГО ГЕНЕРАТОРА, ВХОДЯЩЕГО В ЭЛЕКТРОТЕХНИЧЕСКИЙ КОМПЛЕКС, С ИСПОЛЬЗОВАНИЕМ НАКОПИТЕЛЕЙ ЭНЕРГИИ НА ОСНОВЕ АККУМУЛЯТОРНЫХ БАТАРЕЙ И СУПЕРКОНДЕНСАТОРОВ БОЛЬШОЙ МОЩНОСТИ | 2018 |
|
RU2704313C1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| Вентильный электродвигатель | 1978 |
|
SU767909A1 |
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
| УСТРОЙСТВО ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 1994 |
|
RU2130690C1 |
| Вентильный электродвигатель | 1986 |
|
SU1328891A2 |
