114
H liifipn i priK oTiitii icjTM к ичмери голь
(n(i TC -iUHI -C и МП; Р 1 ()ЫГЬ Jf nii:ll.. MIO
ii -IMC (1Птпг;1;)|||ИчГ1 К1) промыт JIPHlIOf-Tli ji:in КОМТ11О. 1Я K,44f Cll);l H,II VCK;1PMdii ир чукнич.
H lcifiiie ITПИЯ ян.иж. тся IIOIIMIIIP - ИИС- г:р 1И П1: ;иг чмпл пг ги n ,ii,(jc. ronepudr П1 КСЧП РОЛЯ .
lia (. I n-uinp;i;Kp|ia блок-(. хемл npOjiJh; i ;ipMoii гИ1;точ1и; на tjinr. 2 - с rpyvrryiia .чи 1т.мьи м п yi TiKii c rna ; на ihnr. 3 - t jKiK i vpMa алгорИ Г -)а yii- p;i;iJieiiT ;; на фи1 . 4 - блок-схема ято- poi i ;1лго1)нтма упраилонии; ил фиг. 3 - Олок- ;хема -ipo-rbeii чагти ал- горнт-.1,1 yni5aiiJiei( i. i (Jjnr. 6 - лн- Heiiniu. размеры, оцр делякицие положо- ння и:(, ледуемо11 пла(1 инм ил координатном i /i oJie .
Пррдлаг-аеман ( (фщ-. 1) го- дер/ .И г hoop;;iniaTHir.i ; гол i , ичмрри- тс;П-,11ЫИ Г лок 2 (со;|,г ря ai 1иГ датчики :зл(ч:тр н га гич(Ч К()Г1 ) нол , noppiiiri 3 и второй i М.чок т)сч риноды, блок ) сран- нс ния, pt THc i p 6, HPpoi.ii f у и firoiJOH 8 дифроана ю j onh .c прГ ОПрачоиатр ли (Ои- ноллрные ИЛИ), и м иун ичмс ритсльнуго го- /овку 9, нериук мчмерителт нуи jui- нрйк;, 10, тггор;1п и мерител1- 1у}п голон ку 1 1 , втпр,у1Г1 ичмрритсЛ1-|Н 11) линеГ|- ку 12, Н11Ч1 ( .11Итрл;аи)Г уш ройстио i 3, лррпмй 14 и HTopfiii 15 конечные выклиг- чатсли .
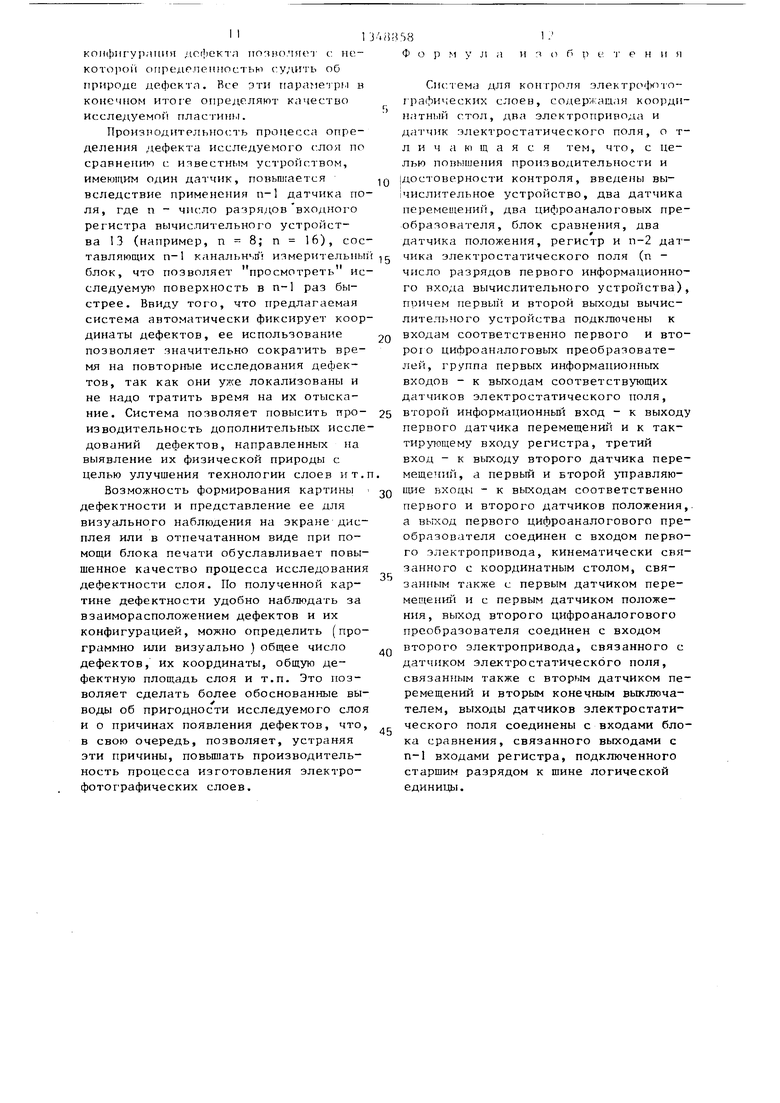
ВычП(.::1Т« Л1.н;,ч у CTPOI ICTHO (ihiir . 2 ) соде1),т иулт- ) 1Ь л равлени, продее- сор 17, Ол(тк 18 памяти, блок Ч тч- ЧгГги, нь;ход11 И регистр 213, pfM iicTp 2i , nepnhiii 22 и B l o- Pi.ni 3 с лотчики импульсов, peiaicTp 24 (;oi.
В качестве ньппк .чителыьм О ycTpoii- .:тва 13 ьчуется СМ-3 и набор f.Otiyn i HHTepi iciica КЛМЛК для связи с;
(lM .
и ишрсм ныходы вычислительного yc i poncTna 3 ре алитонаиы с при- моду.чя i() КЛМЛК. Vm вьгход- Hoii piTHCTp, имеьичиГ; jLBa 24-рачрядных в(.1хода, да11;1ые в которые чанисыва ттси i: О0(че11 riiiiiii; по KON ;iime от Л5г. Для рс алича д:|и -те (л.ии о ихола. ислтсип.- юван.: мод(,,|,ь , рабо аницая в ( ) ncpoi . Зто входно р1- ;л1 л р, д(Ч1 ,ч 1-ai ч ;и11 Heiiiiepiшное по- CTyiMieiuie д.-м1ых с р( 6 (фиг. 1 ) мт1Л{л(: KO inp;,,.-. ; 1. v;ii.-: ; мляетсн ло ко- NtaH,ie .:ч - ли ; : И , С устрш;c i n l 13 н JlliOni; ,. . :i 40Mi:irr. Вч Орым И
-
,
10
15
5
30
35
40
45
50
55
„Ч
тре 1 ьим вхола .щ ii-iani .читрчьнгм о уст- роГип ва явди|о 1 си cMf i iii.ie входг модУ ЛР (, Ь 2 / 1 fI . )то двоично-де- с Я |-ич1П.|р {:чртчики, которою ис11ол1 :1у- ютси дли нрог 1 )аммироваиия раекторий neiipMeiiifMiJifl столика и блока дач чпкоп но.ля, а также для нрограмт-чирорания внода даии1лх с вход,ногс) регисч ра в онера гивнуи нами la ni.i ч недлительно го ycTiJoiic, I ва 13. 4(-1 вертым и пятым входами пычис.лито.ш.ного ycTpoi icTua 1 3 являются дтьч (из 24-х возможных ) пхо- дов модуля 303 . Это регистр за- ii)JO(.;oB, формирующи сигнал прерывании при нозПуждении внешним входным с Игналом любого из ei4) входов.
Биполярные н.нфроаналоговые преоб- рачова 1ели 7 и 8 ныполнены на микросхемах К 59411 Л1 и известных схе- ix инврр-1-И)5онания анал(и оных сигналов, Знак управляющего аналогового сигнала с1)11Н ;;еляс Тся старшим битом кода, выдавас мого в1лчислител1.ным устройством 1 3 .
Измерительная головка 9 и линейка 10 образуют первый датчик переме- щениГ, измерительная головка II и ли- неГ1ка 11- - BTopoi i датчик перемещений.
Пр1- д1 ар1гге:п.)ю на координатном сто- Ле 1 устанавливается исследуемая пластина, которая заряжается известными способами, например, путем медленного продв1гжения столика с нласти- Hoii под источником коронного разряда, выполненного в виде проволочного эле- ктризатора (не показан), который после зарядки 11ласти(гы выключается.
Измерительны блок 2, образованньш из одинаковых (n-l)-x датчиков электростатического поля с чувствительными г лемен гами в виде динамической емкос- 1И, расположенных на одной линии, предназначен для измерения электростатического поля (п-1)-й элементар- Hoi i площ.ади заряженного электрофотографического слоя одновременно. Размерность элементарной площадки зави- си г от разрешающей способности датчика.. Во избежание светового снада потенциала заряжетнюй пластины коорди- нат1л,п1 столик с пластиной, источник кг,ронпого разряда и измерительный GJIOK поме| ;ены в затемняемом пространстве .
(Система работает следующим обра- чгм.
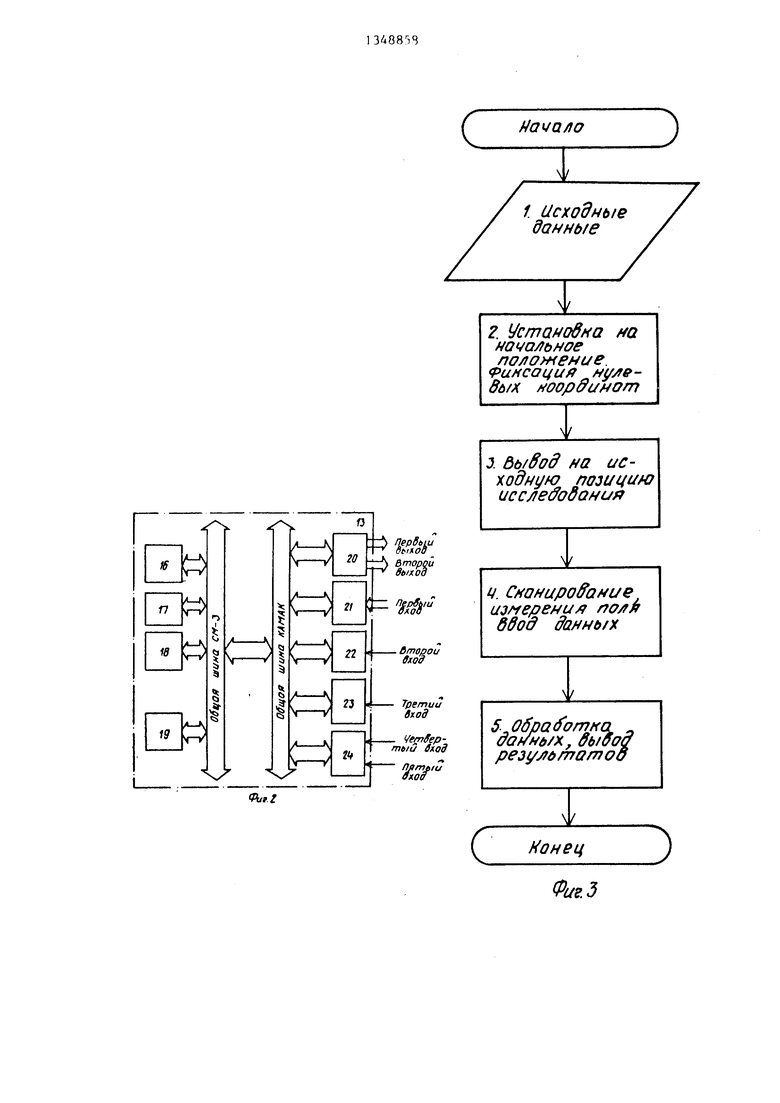
:loc:ie ус 1-ановки на координатньп cno. ii K элек 1 ро()ОтографическоГ1 плас.тиm.i и ее чарядки рключ;)е 1ч:я программа по KOTOpoii осуществляется управление процессом определения дефектности электрофотог рафического слоя, обработка полученных данных и формирование картины дефектности. Управляющая программа, блок-схема которой представлена на фиг. 3, состоит из пяти основных частей.
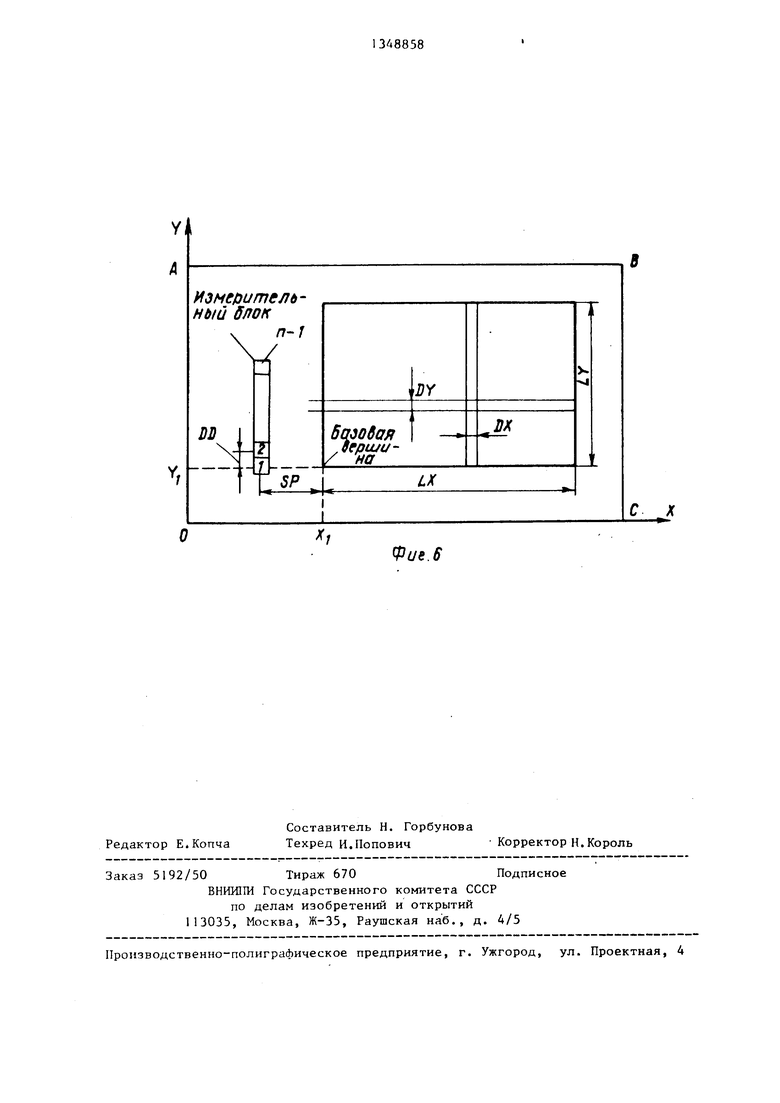
В первой части программы при помощи пульта 16 управления (фиг.2) вводятся исходные данные, такие как координаты Х, YI одной из вершин исследуемого прямоугольного сектора на поверхности электрофотографического слоя, длина составляющих вдоль и поперек координатного стола i LX,LY, величина шага измерения DX вдоль .ти- нии измерения, расстояние DY меячду соседними линиями измерения (шаг вдоль оси У), скорость сканирования V. Величина щага измерения DX вдоль линии, длина LX этой линии и координата Х базовой вершины задаются кратным дискретности следования импульсов DDX первого преобразователя перемещения. Расстояние DY между линиями, длина LY поперечной составляющей исследуемого сектора и координата базовой вершины задаются кратными дискретности DDY следования импутгь- сов второго преобразователя перемещения. Скорость сканирования V задается в виде порядкового номера определенного набора скоростей, значения которых заложены в программе. Здесь электрофотографический слой ограничен фигурой ОАВС (фиг. 6).
После ввода данных по команде с пульта 16 включается вторая часть программы для установки стола 1 и измерительного блока 2 в начальное по- f
ложение, координаты которого принимаются за нулевые, совпадающие с началом координатных осей ОХ, OY. Начальное положение фиксируется при помощи конечных выключателей 14 и 15, подвижные части которых соединены с столом и соответствующей измерительной головкой. Вычислительное устройство 13 опрашивает свои четвертьп1 и пятый входы и по их состоянию через биполярные цифроаналоговые преобразователи 7 и 8 включает соответствующим образом электроприводы 3 и i. Во избежание влияния люфта механической передачи и гистерезиса характеристики конечного выключателя подвод к ну
5
0
5
0
й
0
5
0
5
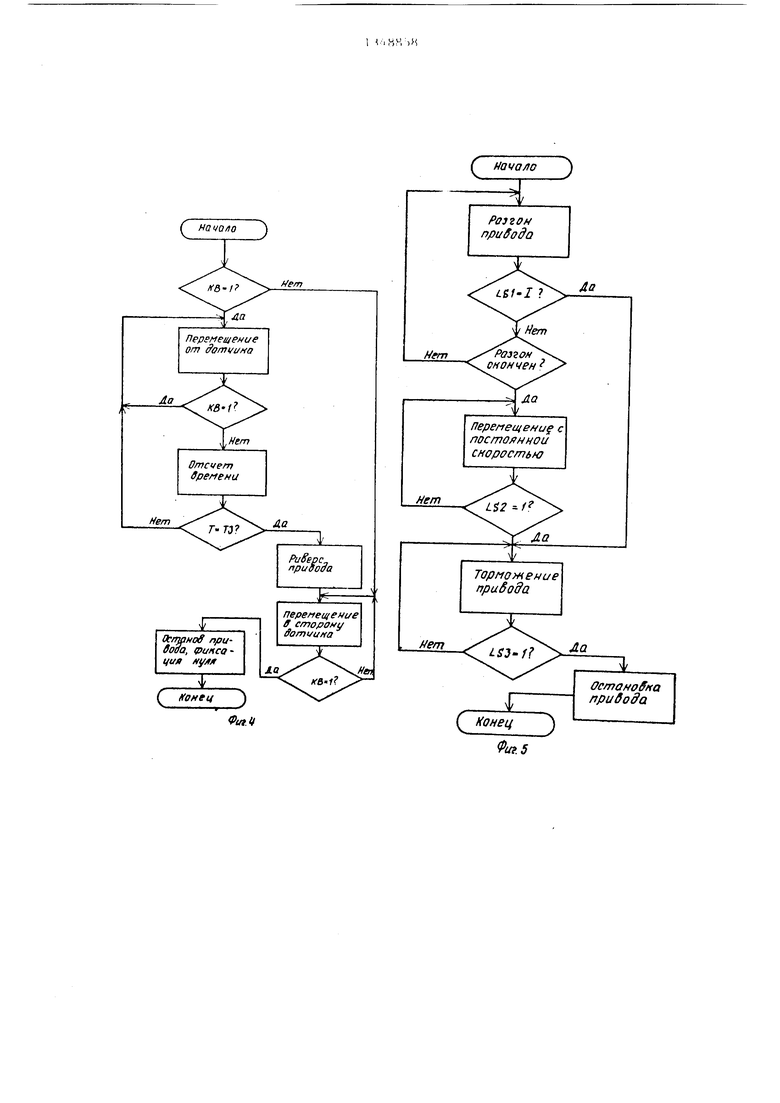
лепому положению координатного стола или измерительной головки осуществляется с одной стороны независимо от исходного 1ГХ положения относительно соответствующего конечного выключателя Блок-схема алгоритма установки нулевого положения по одной координате, например стола 1, представлена на фиг. 4. Сначала проверяется состояние конечного выключателя 14: , если выключатель задействован, и в противном :лучае. При включается привод 3 стола 1 для привода его к нулевому положению и циклически проверяется состояние конечного выключателя. При достижении нулевого положения конечньй выключатель срабатывает, формируется сигнал , привод останавливается, а координата стола 1 в момент срабатывания в памяти вычислительного устройства 13 фиксируется paBHoii нулю. Одновременно сбрасывается на нуль счетчик 22 путевых импульсов, являющийся вторым входом вычислительного устройства 13, контроли- рующш перемещение стола 1 . По числу импульсов, накопленных счетчиком 22 во время торможения, определяется перемещение торможения тех NTOX DDX, которое учитывается при формировании задания для вывода столика на исходную позицию исследования. Обычно скорость перег ещения принимается такой, чтобы путь торможения не превышал дискрета PDX, тогда NTOX О и .
Если при включении второй части программы конечньп выключатель задействован ( ), то привод стола 1 включается для перемещения его в направлении, обратном описанному. Циклически проверяется состояние конечного выкльтчателя, и при его отключении ( ) задается некоторое время ТЗ для продолл ения перемещения ла 1 в заданном направлении. По истечении времени ТЗ привод координатного стола 1 реверсируется и стол 1 начинает перемещаться в сторону нулевого ноложе}гая до срабатывания конечного выключателя (). В зтот момент привод останавливается и фиксируется нулевое положение столика. Аналогично осуществляется установка на начальное положение и фиксация нулевых координат и измерительного блока 2.
После установки стола I и измерительного блока 2 в начальное положение и фиксации нулевых координат вычислитриыюс ycTpoi cTiK) 1 3 переходит к выполнению третье час ти программы осу1Це - 1 1.чяк11ц 1 | выпод стола 1 и ичме- рителыюго блока 2 на исходную) позицию Н1,ч:1гсдонапия, При этом вычисли- устроистно 13 поочередно выполняет функции регулятора положения ;ц1Я ;истем л потппионировапия стола 1 состоящего и:5 биполярного 1Шфроана- лог оного преобразопа геля 7, лектро- нрннода 3, измерительной г-олопки 9 и jumeiiKH И), и для системы потициони- р 7вания ипмерител11Иого блока 2, сос- гоящеГ И биногьчрнпго нифроаналогово г-о преобразователя 8, злектроприво- да 4, измерительной головки 11 и линейки 12. Задания на 1тозиционирова- ние формируются в виде числовых кодов, с:о1 тав.чямщих ni-1 младших разря- дов- упра1 ляюп(егп слона, поступающего на Bxoj; coo i eт ::тв nшeгo биполярного цифро;|1;алогового преобразователя. Направление перемещения при ггозициони- ровании определпетс.я битом знака, за нимаю1И1- М L T apnio разряд унравляницего слова. Т;1дапи 1ь н па позиционирование являются: для измерительного блока 2 число inN NY, - NTOY, где Y /DDV; япя координатного столика - NXK NX,4 NTOX - NSP, где NX, xyODX; N5) SI /DDX; SP - Г1уть,не обходиьпл ДЛЯ pa roiia стола 1 до ус.- танонленно скорости при сканировании ,
Проанализируем процесс позшцюни-- ропания по о;;но11 координате, например сто1П ка. Соо 1-ветствую111,ая блок- схема алгоритма управления представлена на фиг . ), iijiorpaMMHO по имеющимся данным о заданной скорости V позиционирования и ускорении А. торможения Определяется путь торможения STX cTOjjHKa . В рег истр счетчика, связанного с BTopF iM входом вычислительного ycTpoiic jB. i 13, заносит ся число (NW-tfSTX+l), где NSTX STX-DDX, и таким образом программируется путь, по прохождении которого должно начинаться тормо/кение стола 1 . Вк.лючается привод с1ола 1 , скорость коюрого программно увеличивается в соответствии с 3ii;,;iHnnM ускорением разгона Л,, равным уекорспим торможения Л. Направление перемегиения определяется знаком вырал епия NXN. При разгоне привод; циклически проверяегся состояние вых. ).,а L.S счетчика 22, на счеч ньи; пход KO iojKii o поступают им-.8838
пульсы пути с измерительной головки 9, следую1чие с ди :кретностью DUX, По окончании разгона привод 3 переходит в релчим постоянной скорости, т.е. заfj
да)1ие на входе преобразователя 7 остается постоянным до тех пор, пока стол 1 проходит путь, равньп (NXN - - NSX)DDX, а оставшаяся часть задан)Q ного перемещения DSX становится равной пути торможения STX NSTX DDX. В зтот момент счетчик 22 переполняется, формирует сигнал прерывания LSj 1, по которому начинается тор1Г, можение стола путем программного
умепынения задания на входе преобра- ;)ователя 7 из условия обеспечения заданного ускорения. Одновременно с переходом в режим торможения в счетчик 22 заносится число NSTX +
и
таким образом программируется нуть торможения STX NSTX DDX. При про- х(ждс нии этого пути счетчик 22 снова переполняется, формирует сигнал преtj рывлния 1,83 1, по которому снимается унраи.ление с входа преобразователя 7, и привод останавливается. Траектория тп1)можения подобрана такой, что к месту Останова стол 1 подходит с поQ сгоянной небольшой cKOpocTbfc, подобранно из расчета, чтобы перемещение столика после снятия управления не превь 1 ало одного дискрета DDX. В том , когда программно определенное цифровое значение пути торможения
NSTX NXN/2, принимается NSTX NXN/2, привод не успевает разогнаться до ус- та овленной скорости и команда на торможение формируется по прерыванию счепчика, LS 1. Нривод перемещения измерительного блока 2 при выводе его на исходную позицию управляется ана- лог- 1чным способом.
После выполнения третьей части nporpaNfMb измерительный блок находится отодвинутым от поперечной состав- ляюш, исследуемого сектора на расстояние SP , причем кравший датчик изме1Э 1тельног о блока 2 находится на . линии, совпадаю цей с 1 родольной сос- авляю це ( исследуемого сектора электрофотографического слоя. Остальные п-2 датчика измерительного блока 2 сдвинуть относительно друг друга по , параллельной поперечной сос- тавля1 11:1ей сектора на расстояние DD, кратное минимальному расстоянию DY л П111Ям) (см. фиг. 6). Система находится Ti исход11О1 1 позиции для ис-
0
O
5
следор ания дефектности таданиого сектора эле1стро4)Отографического слоя.
При выполнении четвертой части програм Л1 вычислительное устройство 13 управляет процессом сканирования, осуп1ествляет сбор информации о дефектности исследуемого слоя и формирует соответствующий массив данных. Сканирующее движение осуществляется поочередным включением привода 3 координатного стола 1 и привода 4 измерительного блока 2 путем формирования на входах первого и второго биполярных иифроаналоговых преобразователей соответствующих сигналов управления. Оба привода работают в режиме пози- циошфования, функцию регуляторов положения для обоих приводов вьпголняет вычислительное устройство 13. Величина и знак перемещения стола 1, принимая путь разгона Sp равным пути торможения S,Определяются согласно формуле LP (-l) - (LY + 2Sp), где i I, 2,...,j - порядковьш номер проходки координатного стола. После очередной проходки измерительный блок 2 перемещается на расстояние, равное расстоянию между двумя линиями DY, а когда часть сектора между двумя датчиками просканирована - на расстояние, равное расстоянию между К (п-2) -DD/DY+I линиями.
Перед началом сканирования и ввода данных измерения в выделенную область оперативной памяти записываются три слова информации: это числовые значения координат NX, NY, , базовой вершины исследуемого сектора и по- рядковьп номер будущей проходки сканирования. Характерным признаком этих слов является то, что старший разряд равен нулю. Затем в счетчик 22 записывается число NSp + I и запускается привод стола 1 на заданную скорость. При разгоне стола и перемещения его до начала строки на счетный вход упомянутого счетчика поступает NSp импульсов, счетчик 22 переполняется и формирует сигнал прерывания, по которому в вычислительное устройство 13 по первому входу вводится слово информации с регистра 6, записанное в данный регистр в момент поступления последнего путевого импульса с измерительной головки 9. Старший п-й разряд этого слова равен единице и указывает, что данное слово относится к информации о дефектности исследуемого
5
0
5
0
S.
0
t;jTOH, другие п-1 р. - гэто информации о качестве информативных площадок, находя1цихс;я под соответствующими датчиками измерительного блока 2. При дефектно) площадке в соответствующем разряде запишется О, а при качественной - l. С данного момента счетчик 22 переводится в режим деления путевых импульсов, поступающих на его счетньш вход с измерительной головки 9, на коэффициент, равньв1 NDX DX/DDX, вследствие чего обеспечивается заданньп таг DX следования импульсов прерывания, с приходом которых периодически вводится в память вычислительного устройства 13 результат о дебектности п-1 информативных лиши с регистра 6, обновляемый с кажлым путевым импульсом.
После очере/июго ввода данных программно проверяется условие достижения конца строки: М LX/DX, где М- порядковьй номер проведенного измерения вдоль информативной линии слоя. При удовлетворении данного условия измерения прекращаются, привод координатного стола 1 программно останавливается. Затем программно проверяется, просканирован ли заданньпЧ сектор исследуемого слоя. Сканирование заканчивается после завершения i-ro прохода стола 1, определяемого по выражению i A(DD/DY) + P. Коэффициент Л - это целая часть результата деления длины поперечной составляющей сектора N на расстояние между первым и п-1 датчиками измерительного блока 2, получаемого в виде
tIY/Lf(n-l) DD А + ) DD. Число Р определяется из условия Г B/DY при В iDD;
Р
45
DD/DY при В- , DD.
0
5
Если сканирование сектора не закончено, включается привод перемещения измерительного блока 2 на определенное расстояние, записывается в массив данных порядковый номер следующей проходки, изменяется значение бита знака в слове управления приводом координатного стола, привод стола 1 запускается в обратном направле- НИИ и процесс повторяется описанным образом. В процессе сканирования заданного сектора исследуемого слоя, измерения и ввода данных в оперативной памяти вычислительного устройства 13 обрапуется массив данных, состоящий из групп слов, в старшем разряде которых записпно 1, разделенных словами с порядковыми номерами этих групп, в старших разрядах которых записано О, Порядковые номера групп носят информацию об положении измерительного блока 2 во время со- ответствуюае проходки относительно базовой координаты Y,. Положение некоторого информативного слова в группе слов указывает на положение стола I относительно базовой координаты Х в момент измерения, а каждьш разряд в информативном слове соответствует определенному датчику измерительного блока 2. Полученный массив данных является своеобразной картиной электростатического поля исследуемой поверхности слоя. По наличию зарегистрированных нулей можно судить о дефектности слоя, а по местонахождению нулевых ячеек в оперативной памяти можно определить местонахождение дефекта на слое. Однако полученньп массив данных является неудобным для вывода результатов измерения на экран дисплея или иа печатающее устройство для визуального наблюдения.
В пятой части программы осуществляется преобразование полученного массива данных в массив, удобный для чтения содержания разрядов ячеек памяти и выво да результата для визуального наблюдения на экран дисплея или для печатания на бумаге с использованием АЦПУ. Преобразование массива осуществляется программным путем, таким образом, чтобы информация о полученных результатах измерения по одной строке была помещена в целое число соседних ячеек памяти. При этом данные об измерениях по первой линии сектора помещаются в Q ячеек, начиная с ячейки младдиего адреса в выделенном секторе пг1мяти. Число Q определяется, дополнив результат деления NX/16 до целого числа (NX LX/DX - число измерений по строке). В первый разряд первого слова из группы Q слов переносится результат первого измерения по линии, во второй разряд - результат второго измерения и т.д., результат 17-го измерения помещается в 1-й бит следующего слова и так до тех пор, пока не будут переписаны все результаты измерений, проведенных по
5
0
5
0
5
0
5
0
5
первой линии. Оставшиеся свободные старшие яче11ки последнего слова первой группы заполняются нулями. Перед заполнением второй и последующих Q групп слов массива результатами измерений по соответствующим линиям сначала определяется при каком направлении перемещения стола 1 произведены измерения по данной линии. Если направление перемещения стола 1 положительно (направлено от начала строки к ее концу), то группа слов массива заполняется описанным способом. Если направление перемещения стола отрицательно, то заполнение группы Q слов осуществляется в обратном направлении, начиная от слова со старщим адресом в группе. При этом число занимаемых младщих разрядов в старщем слове групп равно остатку результата деления LX/DX. Первый результат измерений по такой строке заносится в старший используемый разряд старшего слова, второй - в разряд на бит младше и т.д. По заполнении одного слова переходим к заполнению следующего слова, начиная со старщего разряда, и так до тех пор, пока не будет заполнен младщий разряд последнего слова с наимладщим адресом в группе, соответ- ствующш последнему измерению по линии, пройденной в обратном направлении. Таким образом, в памяти вычислительного устройства 13 формируется двухмерный массив размерностью NX«NY, где ОТ LY/DY - число линий сканирования .
Для отображения картины дефектности некоторой области просканированно- го сектора, определяемой заданным числом отрезков линий заданной длины, необходимо побитно прочитать соответствующую область двухмерного массива данных, дешифрируя результат, зане- сенньй в читаемые ячейки памяти в оп- ределенньп символ.
Площадь отдельного дефекта или интегральную площадь всех дефектов можно определить как программно, так и визуально, определив количество информативных площгадок, входящих в дефекты. Координаты дефектов, по которым они могут быть локализованы на исследуемом слое, тоже могут быть определены как программно, так и визуально (по координатам базовой вершины X
01
о.
удалению дефекта от баaoBoi i верщины). Отчетливо наблюдаемая
111
кои()игура11ия дефекта погикхчяет с нс- KOTopoi i огфеделеииостьы судить об природе дефск 1 а. Все эти парамеч ры в конечном итог е определяют качество исследуемой пластиш,.
Произподитрльность процесса определения дефекта исследуемого с-.лоя по сравнению с известным устройством, имеющим один датчик, повьшгается вследствие применения п-1 датчика поля, где п - число разрядов входного регистра вычислительного устройства 13 (например, п 8; п 16), составляющих п-1 канальньп измерительны блок, что позволяет нросмотреть исследуемую поверхность в п-1 раз быстрее. Ввиду того, что предлагаемая система автоматически фиксирует координаты дефектов, ее использование позволяет значительно сократить время на повторные исследования дефектов, так как они уже локализованы и не надо тратить время на их отыскание. Система позволяет повысить производительность дополнительных исследований дефектов, направленных на выявление их физической природы с целью улучшения технологии слоев ит.п Возможность формирования картины дефектности и представление ее для визуального наблюдения на экране дисплея или в отпечатанном виде при помощи блока печати обуславливает повышенное качество процесса исследования дефектности слоя. По полученной картине дефектности удобно наблюдать за взаиморасположением дефектов и их конфигурацией, можно определить (программно или визуально ) общее число дефектов, их координаты, общую дефектную площадь слоя и т.п. Это позволяет сделать более обоснованные выводы об пригодности исследуемого слоя и о причинах появления дефектов, что, в свою очередь, позволяет, устраняя эти причины, повышать производительность процесса изготовления электрофотографических слоев.
581 .
Форм у л а п 3 о б р е. -i- е н и я
Сисггема для ко1ггроля электрофото- г рафич еских слоев, содержащая координатный стол, два электропривода и датчик электростатического поля, о т- личающаяся тем, что, с целью повышения производительности и
|достоверности контроля, введены вычислительное устройство, два датчика перемещений, два цифроаналоговых преобразователя, блок сравнения, два датчика положения, регистр и п-2 датчика электростатического поля (п - число разрядов первого информационного входа вычислительного устройства), причем первы и второй выходы вычислительного устройства подключены к
входам соответственно первого и второго цифроаналоговых преобразователей, группа первых информационных входов - к выходам соответствующих датчиков электростатического поля,
второй информационный вход - к выходу первого датчика перемещений и к тактирующему входу регистра, третий вход - к выходу второго датчика перемещений, а первый и второй т1равляющие входы - к вькодам соответственно первого и второго датчиков положения,, а выход первого цифроаналогового преобразователя соединен с входом первого электропривода, кинематически связанного с координатным столом, связанным также с первым датчиком перемещений и с первым датчиком положения, выход второго цифроаналогового преобразователя соединен с входом
второго электропривода, связанного с датчиком электростатического поля, связанным также с вторым датчиком перемещений и вторым конечным выключателем, выходы датчиков электростатического поля соединены с входами бло
ка сравнения, связанного выходами с п-1 входами регистра, подключенного старщим разрядом к шине логической единицы.
1. исходные данные
2. Установка на HQt a/ibHoe .
г инсаций y/f ffu/x ffoopacfHom
J. дь/ffod на ис- ходн1/ю позицию ucc/ieffodoHUft
Q. CHOHupoffoHue из/ ерени/t rro/rff бвод ffoHHb/x
Nf
оаннд/)( вы боа ре31/ 6 /77агл од
с
Ионец Фиг. 5
-)
( начало
Перепещени с
постоянной
споростью
Торможение npuSoda
Останобна привода
( Конец Фиг. 5
Редактор Е.Копча
Составитель Н. Горбунова
Техред И.Попович Корректор Н. Король
Заказ 5192/50 Тираж 670Подписное
ВНИШТИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
us.6
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство двухкоординатного позиционирования | 1985 |
|
SU1288653A1 |
| Устройство для измерения размеров деталей | 1986 |
|
SU1397729A1 |
| Твердомер | 1985 |
|
SU1310686A1 |
| Устройство для исследования характеристик пьезоэлектрических преобразователей | 1988 |
|
SU1672555A1 |
| Устройство для программного управления | 1986 |
|
SU1416938A1 |
| Устройство для контроля твердости | 1987 |
|
SU1434323A1 |
| Многоэлементный вихретоковый преобразователь | 2020 |
|
RU2743151C1 |
| Способ определения растворимости кислорода в водных растворах | 1988 |
|
SU1585323A1 |
| Устройство для измерения геометрических параметров | 1988 |
|
SU1613846A1 |
| Устройство для измерения распределения поверхностного электрического потенциала | 1988 |
|
SU1659915A1 |
Изобретение относится к измерительной технике и может быть использовано в электрофотографической про- мьшленности для неразрушающего контроля качества выпускаемой продукции. Цель изобретения - повышение производительности и достоверности контроля. Система сол,ержит координатньш стол 1, измерительный блок 2, первьш 3 и второй 4 координатные :электроприво- ды, блок 5 срав}1ения, регистр 6, первьш 7 и второй 8 цифреаналоговые преобразователи, измерительные головки 9, 11, измерительные линейки 10, 12, (ычислительное устройство 13, 14 и второй 15 концевые выключатели. Цель изобретения достигается вве лением в измерительный блок п-2 электростатических датчиков, соответ- счвугачих средств обработки информации от этих датчиков, а также вычислительного устройства, управляющего перемещением объекта контроля и обработкой полученной информации. 6 ил. (Л со 4 00 оо СП 00
| Двухканальный преобразователь перемещений | 1983 |
|
SU1135011A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
