О5
со оо 00
Устройство относится к автоматике и вычислительной технике и может быть использовано для программного управления про.мьшшенными роботами и станочным оборудованием типа обрабатывающего центра.
Цель изобретения - повышение быстродействия и точности и расширение функциональных возможностей устрой- ства программного управления.
На фиг. 1 представлена структурная электрическая схема устройства для программного управления; на фиг,2 блок программ; на фиг. 3 - коммута- тор.
Устройство содержит блок 1 программ с первым информационным выходом 2, привод 3, кинематически связанный с датчиком А импульсов датчика 5 пе- ремещений, в который также входят последовательно соединенные блок 6 v интерполяции, реверсивный счетчик 7 и буферный регистр 8, выход которого подсоединен к информационному входу 9 блока программ. Первый и второй сигнальные выходы 10, 11 блока программ через датчики ,12, 13 состояния выхода подключены к входам элементов И 14, 15. Элемент И 15 подсоединен выходом к установочному входу RS-триг- гера 16, сбросовый вход которого подключен к третьему сигнальному выходу 17 блока программ. Выход RS-тригге- ра 16 подсоединен к деблокирующему входу привода, сигнальному входу 18 блока программ и первому входу тре- т,ьего элемента И 19, к второму входу которого подключен четвертый сигнальный выход 20 блока программ, а сигнальный выход 21 подключен к сбросовому входу RS-триггера 22. Прямой выход RS-триггера 22 подсоединен к сигнальному входу 23 блока программ, второй информационный выход 24 кото- рого подключен к установочному входу реверсивного счетчика. В устройство входит контактный датчик 25.
Блок 1 nporpabsM состоит из контактного датчика 25, блока 26 связи с внешним устройством, адресного регистра 27, шинного формирователя 28, адресного дешифратора 29, коммутатор 30 выходов, коммутатора 31 входов, системной магистрали 32.
Коммутатор 30 выходов содержит девять элементов И 33-41, осущест- 18ляющих коммутацию информационных ка налов; выходов блока 1 программ, при
o
5
0 5 О с Q
р
5
чем три 16-битные информационные а- налы (D,, Dj, D,) образуют первый 2 и второй 24 информационные выходы блока программ; два однобитных канала (D4, D) образуют соответственно первый и второй 10, 11 сигнальные выходы для управления датчиками 12, 13 состояния выхода, один трехбитный канал (Dg), образующий третий сигна- льньй выход 17, четвертый сигнальный вькод 20 и пятый сигнальный выход 21.
Устройство работает следующим образом.
Режим блока программ состоит из двух и;иклов: адресного и ввода-вывода. При адресном цикле блок программ производит начальные коммута- 1ции, при цикле ввода-вывода принимает или посылает данные и сигналы управления в другие блоки устройства.
При включении устройства блок 1 программ с сигнальных выходов 21, 17 приводит триггер 22 в состояние О, а триггер 16 - в состояние 1 на инверсном выходе, тем самым деблокируя привод 3, С информационного выхода 2 блок 1 программ запускает-привод 3с максимальной скоростью. При появлении сигнала на выходе датчика 4 импульсов триггер 22 устанавливается в состояние 1. При появлении 1 на сигнальном входе 23 блок 1 лрограмм останавливает привод 3 по заданному закону торможения. Этим исключаются погрешности, связанные с люфтами и резкими движениями рабочего органа при реверсировании и достигается большое быстродействие установки начала координат,
1 . .
Сигнальньш выход 21 переводит
триггер 22 в О, а датчик 12 состояния выхода с сигнального выхода 10 устанавливается в 1, тем самым открывая элемент И 14. После этого приводу 3 задается определенная скорость позиционирования в противоположном направлении. При появлении сигнала на первом выходе датчика 4 импульсов реверсивный счетчик 7 сбра- сьшается к нулю через открытый элемент И 14. Тем же сигналом триггер 22 устанавливается в состояние 1 и информирует блок 1 программ, что установка абсолютного начала координат произведена.
В режиме Измерение позиционирование устройства до момента получения сигнала контактного датчика 25 производится следуюи1им образом.
Датчик состояния выхода через выход 11 устанавливается в состояние 1, открывая тем самым элемент И 15 Через сигнальный выход 17 триггер 16 опрокидывается, и на его инверсном
данному алгоритму путем уменьшения скорости перемещения с приближением до заданной координаты. Предваритель ная запись координаты в буферном регистре 8 позволяет считьшать в блок 1 программ многоразрядное двоично- десятичное значение координаты за не сколько циклов. При равенстве значевыходе Q устанавливается 1, деблокируя привод 3. Через сигнальньй вы- JQ ний заданной и считанной с регистра
ход 21 сбрасывается триггер 22, и с его прямого выхода Q на сигнальном входе 23 появляется . На сигнальном выходе 20 устанавливается 1, датчик 12 состояния выхода сбрасыва- {5 ется в состояние О, Далее с информационного выхода 2 запускается привод 3 с определенной скоростью позиционирования. При поступлении сигнала от контактного датчика 25 через 20 элемент И 15 триггер 16 устанавливается в с остояние 1 на инверсном выходе Q. Через элемент И 19 записывается в буферный регистр 8 текущая
8 координат блок 1 программ с Ш1фор- мационного выхода 2 выдает код, останавливающий привод 3.
Позиционирование до заданной координаты, в относительной системе ко- происходит следующим образом
Начало координат устанавливается по сигналу с первого выхода датчика 1мпульсов, как описано выше. Рабочий орган позиционируется до начала отно ситс:;- ной системы координат, заданной блоком 1 программ, или до координаты, задаваемой сигналом контактного датчика 25. В последнем случае
416938
данному алгоритму путем уменьшения скорости перемещения с приближением до заданной координаты. Предварительная запись координаты в буферном регистре 8 позволяет считьшать в блок 1 программ многоразрядное двоично- десятичное значение координаты за несколько циклов. При равенстве значеJQ ний заданной и считанной с регистра
8 координат блок 1 программ с Ш1фор- мационного выхода 2 выдает код, останавливающий привод 3.
Позиционирование до заданной координаты, в относительной системе ко- происходит следующим образом.
Начало координат устанавливается по сигналу с первого выхода датчика 1мпульсов, как описано выше. Рабочий орган позиционируется до начала отно- ситс:;- ной системы координат, заданной блоком 1 программ, или до координаты, задаваемой сигналом контактного датчика 25. В последнем случае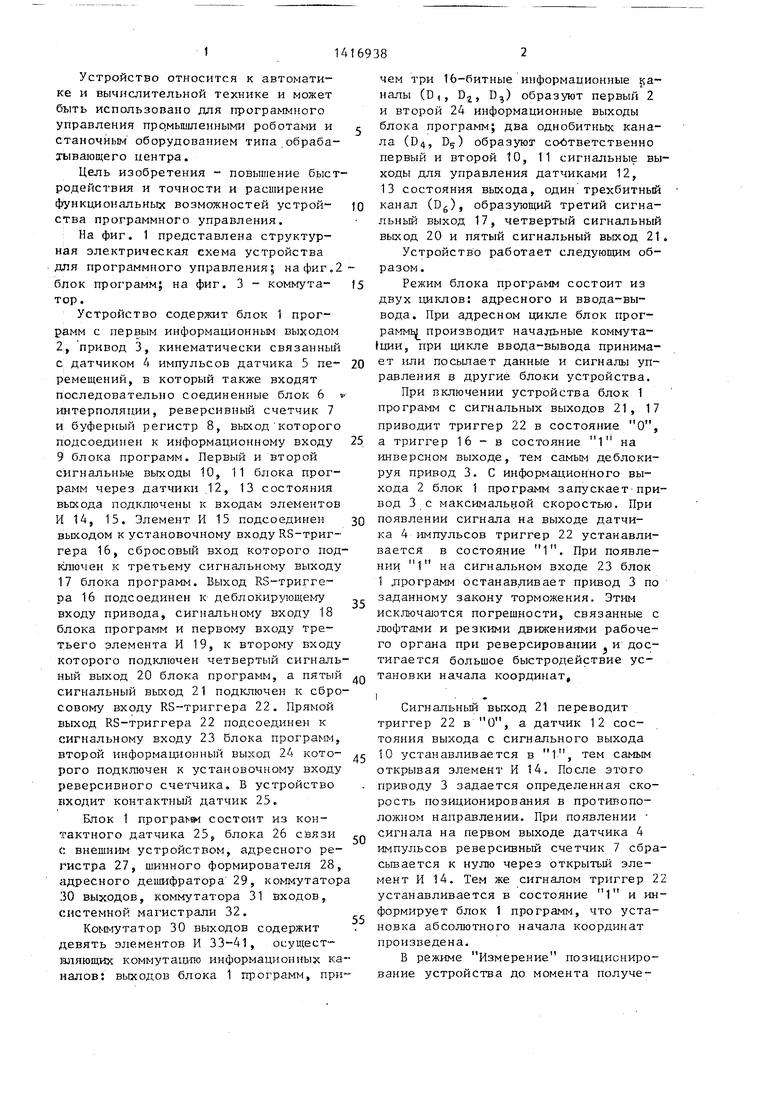
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения линейных перемещений | 1986 |
|
SU1379601A1 |
| Устройство для сопряжения вычислительного комплекса накопителей на магнитной ленте | 1983 |
|
SU1142839A1 |
| Устройство для счета импульсов | 1989 |
|
SU1629987A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство для измерения геометрических параметров | 1988 |
|
SU1613846A1 |
| Устройство для позиционного программного управления | 1982 |
|
SU1068895A1 |
| Телевизионное устройство для измерения координат пятна | 1987 |
|
SU1450136A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ И УПРУГОДИССИПАТИВНЫХ СВОЙСТВ ПОВЕРХНОСТЕЙ ТРЕНИЯ | 1992 |
|
RU2036464C1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| Позиционный электропривод | 1983 |
|
SU1124255A1 |

Изобретение относится к автоматике и вычислительной технике и может быть использовано для программного управления промышленными роботами и станочным оборудованием типа обрабатывающий центр для привязки координат обрабатываемой детали к системе координат станка, а также в координатных измерительных машинах и в устройствах измерен11Я угловых и линейных величин. Цель изобретения - повышение быстродействия, точности . и расширение функциональных возможностей устройства. Указанная цель достигается тем, что в устройство дополнительно введены два RS-триггера, датчики состояния выхода, блок интерполяции, буферный регистр, что и обеспечивает повышение быстродейст- .вия и точности позиционирования при разных режимах работы и позволяет эффективно применять фотоэлектрические датчики при контроле и измерении угловых и линейных величин (2-й и 3-й класс точности). Кроме того, реализован сброс реверсивного.счетчика и регистра сигналами блока управления при разных режимах работы и реализована возможность записи в реверсивный счетчик заданной координаты, что расширяет функциональные возможности ; устройства для программного управления. 2 ип. S СП
координата со счетчика 7, соответст- 25 ,записанная в регистре 8 координата
вующая положению детали в момент срабатывания контактного датчика 25. Одновременно отрицательный уровень сигнала на инверсном выходе Q триггера 16 останавливает привод 3 и по сигнальному входу 18 информирует бло 1 программ. Таким образом точно фиксируется положение точки соприкосновения контактного датчика с деталью. После этого Ш формация о координате может считываться с регистра 8 через информационньм вход 9 в блок 1 программ для регистрации и дальнейшей обработки.
Позиционирование до заданной коор динаты в абсолютной системе координат происходит следующим образом.
Начало координат устанавливается по сигналу с первого выхода датчика 4 импульсов, как описано выше. Датчик 12 состояния выхода сбрасывается в состояние О, триггер 16 устанавливается в состояние 1 на выходе Q, тем самым открывая элемент И 19. Заданная координата записывается в памяти блока 1 программ. Текущая-координата с реверсивного счетчика 7 записывается в буферный регистр 8 через элемент И 19 сигналом блока 1 программ с сигнального выхода 20. Через информационный вход 9 текущая координата постоянно считывается и сравнивается с заданной координатой. Позиционирование производится по за
35
ng
Q
45
0
5
через информационньм вход 9 считывается в блок 1 программ и запом -ша- ется. Блок 1 программ через информа-| ционньй выход 24 записывает нули в реверсивньм счетчик 7. После этого происходит позиционирование к заданной новой координате описанным вьпяе образом. При необходимости блок 1 программ в любой момент времени может пересчитать относительную координату в абсолютную.
Формула изобретения
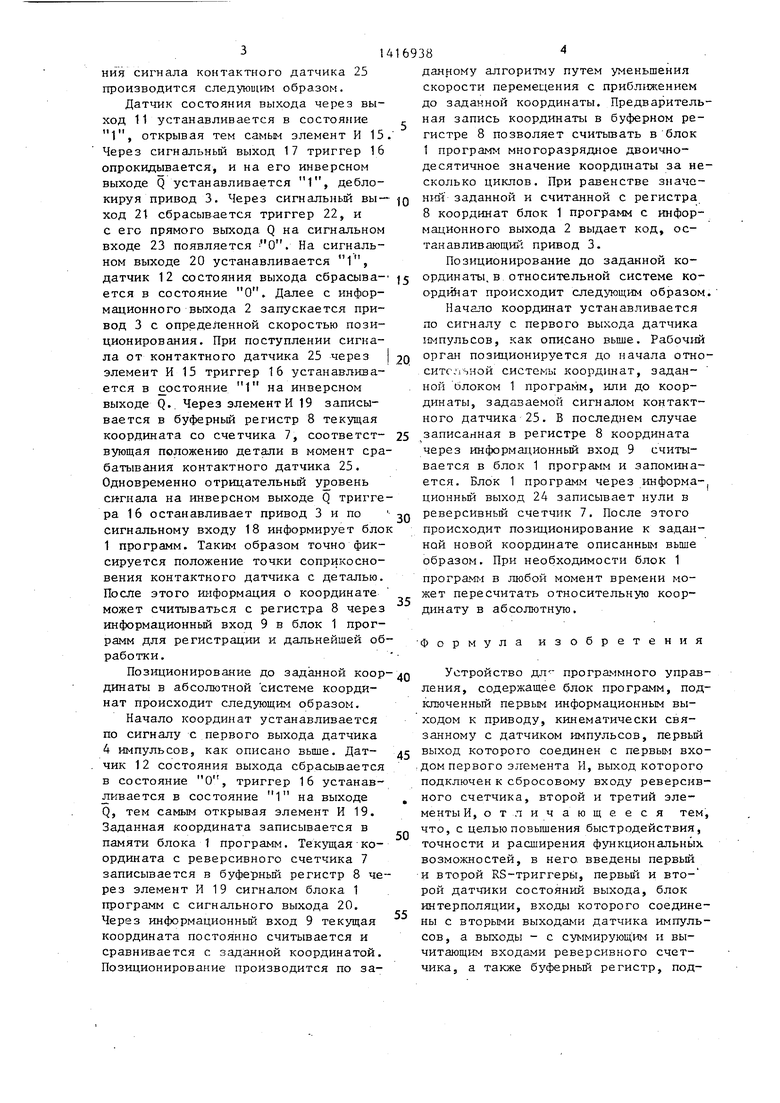
Устройство программного управления, содержащее блок программ, подключенный первым информационным выходом к приводу, кинематически связанному с датчиком импульсов, первьй выход Которого соединен с первым вхо- : дом первого элемента И, выход которого подключен к сбросовому входу реверсивного счетчика, второй и третий элементы И, отличающееся тем, что, с целью повышения быстродействия, точности и расширения функциональных возможностей, в него введены первьй и второй Е5-триггерь1, первьп и вто- рой датчики состояний выхода, блок интерполяции, входы которого соединены с вторыми выходами датчика импульсов , а выходы - с суммирующ им и вычитающим входами реверсивного счетчика, а также буферньй регистр, под514
ключенньй вводом к выходу реверсивного счетчика, а выходом - к шфopмa- ционнрму входу блока nporpai, первьй и второй сигнальные выходы которого соединены с входами первого и второго датчиков состояния выхода, выходы ко- :Торых подключены к второму и перво- му входам первого и второго элемен- ;тов и, причем второй вход второго Элемента И соединен с выходом контактного датчика, а выход подключен к установочному входу первого RS-триг- гера, сбросовый вход которого соединен с третьим сигнальным входом блока программ, инверсный выход первого RS-триггера соединен с деблокирующим
„
. /
386
входом привода, первым сигнальным входом блока программ и первым входом третьего элемента И, выход кото- рого соединен с записьшающим входом буферного регистра, второй ввод третьего элемента И соединен с четвертым сигнальным выходом блока программ, пятьм сигнальный выход которого под-J
ключей к сбросовому входу второго RS-триггера, установочньй вход которого соединен с первым выходом датчика импульсов, а прямой выход - с вторым сигнальным входом блока программ,
второй информационный выход которого соединен с установочным входом реверсивного счетчика.
ор М. Циткина 4063/44
Составитель Е. Титов Техред А.Кравчук
Корректор
Тираж 866Подписное
Б11ИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Корректор Л. Патай
| Делительное устройство | 1985 |
|
SU1288025A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для программного управления | 1984 |
|
SU1203485A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
