1
288653 2
счетчиков 13 и 14 поступают сигналы обратных связей по перемещению в унитарном коде с выходов датчиков 9 и 10 изменяющие содержание ЛЦ
и iN,j следующим образом
N, - N,,
fO
uN
N,S. N,
Изобретение относится к автоматическому управлению и может быть использовано в программных системах двухкоординатного позиционирования,
Целью изобретения является повышение точности позиционирования и упрощение устройства.
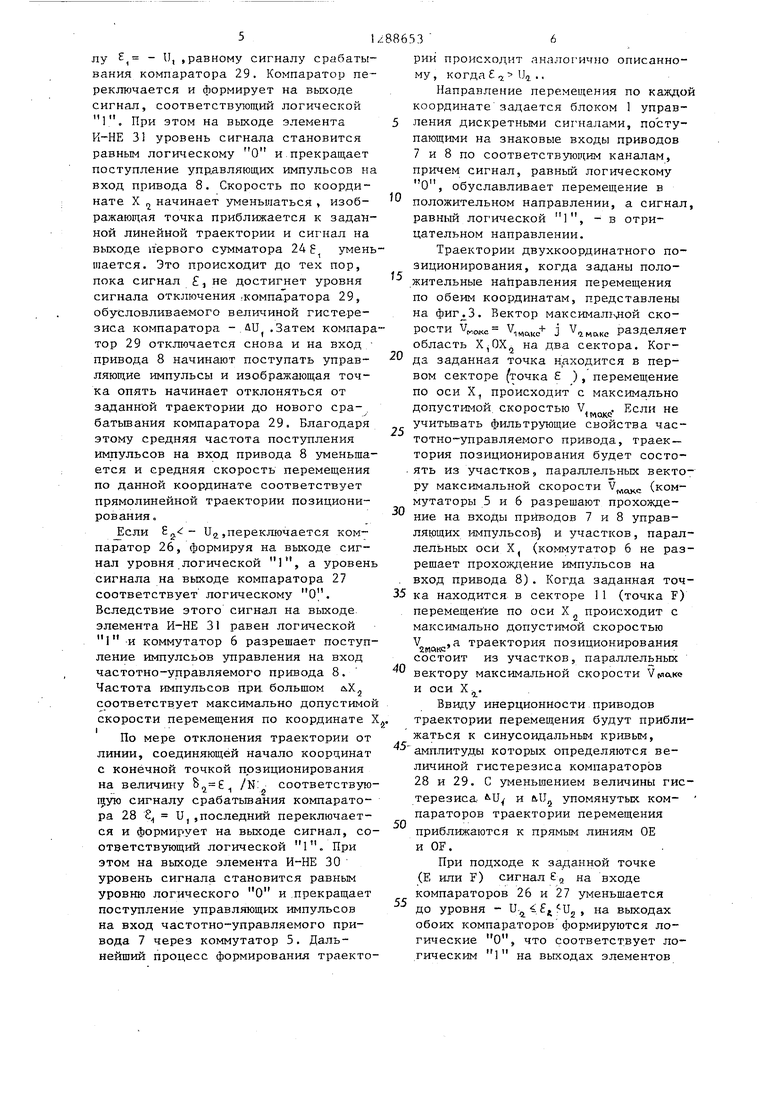
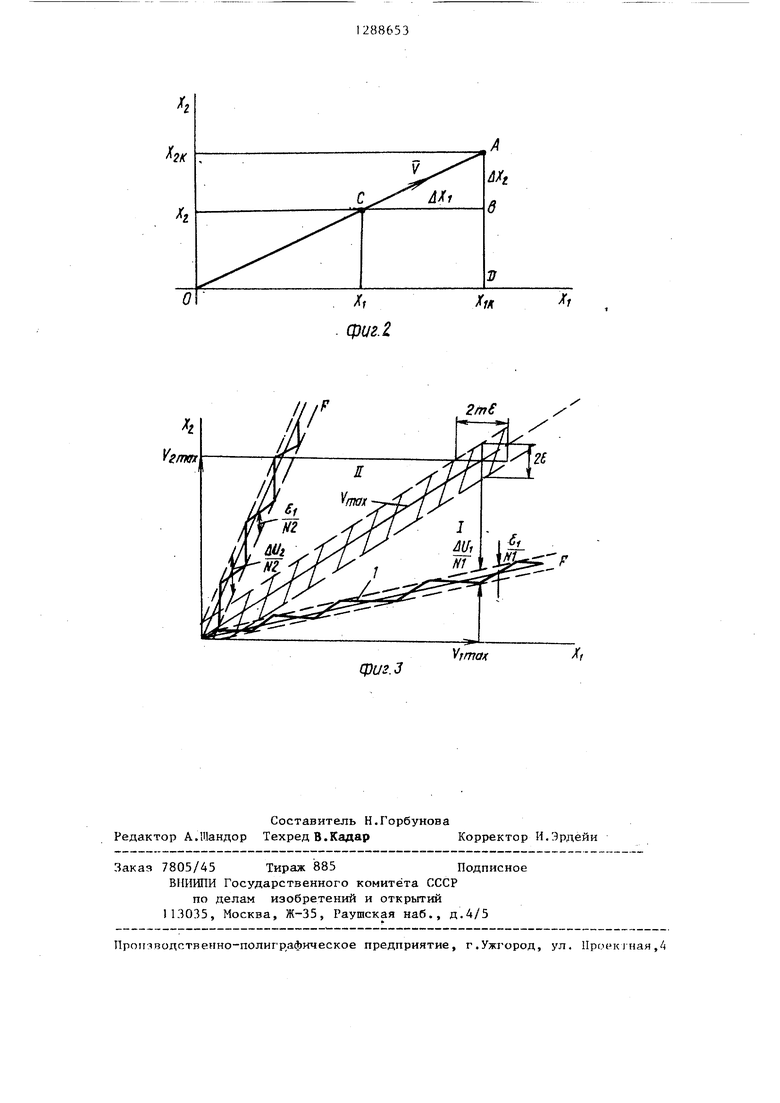
На фиг.1 представлена блок-схе- ма предлагаемого устройства; на фиг.2 и 3 - примеры траекторий двухкоординатного позиционирования при- заданных направлениях перемещения по двум координатам.
Устройство содержит блок 1 ввода, блок 2 управления, первый 3 и второй 4 преобразователи напряжение - частота, .первый 5 и второй 6 коммутаторы, первый 7 и второй 8 координатные приводы, первый 9 И второй JO координатные датчики перемещения, блок II коррекции, логи ческий блок 12.
Блок 2 управления содержит счетчики 13 и 14 импульсов, цифроаналого- 5 логовых преобразователей вые преобразователи 15 и 16, элементы ИЛИ-НЕ 17 и 18 и элемент И 19.
Блок 11 коррекции содержит второй 20 и первый 21 регистры, второй
.(О
15
20
где NQ и - количество импульсов, поступивших на вычитающие входы счетчиков 13 и 14 по каналам обратных связей, соответствующие пройденному пути по каждой координате. I
Содержание счетчика 13 N, при помощи цифроаналогового преобразователя I5 преобразуется в аналоговый сигнал (напряжение) &Х, а содержание счетчика 14 &K,j при помощи цифро-аналогового преобразователя 16 - в аналоговый сигнал Снапряже- ние) uXj. Выходные сигналы цифроанаопределяют выходную частоту преобразователей 3 и 4 напряжение - частота и таким образом задают частоту вращения (частотно-управляемых) ко22 и первый 23 цифроаналоговые преоб- ординйтньк приводов 7 и 8, а тем
разователи,второй 24 и первый 25
самым и скорость перемещения по каждой координате. Цифроаналоговые преобразователи I5 и 16 обеспечены схемами ограничения выходного сигнала 35 на заданном уровне и аХ,, соответствующем максимально допустимым скоростям перемещения по каждой координате V , V (V. m-V )
сумматоры..
Логический блок 12 содержит первый 26, четвертый 27, третий 28 и второй 29 компараторы, первый 30 и второй 31 элементы И-НЕ и масштабный преобразователь 32.
Координатные датчики 9 и 10 перемещения преобразуют координатные перемещения в унитарный код.
Коммутаторы 5 и 6, выполненные в виде логических элементов И, пропускают импульсы управления на входы соответствующих частотно-управляемых координатных приводов в том случае, когда к управлякяцему входу коммутатора приложена логическая
Г
Устройство работает следующим образом.
Блок 1 ввода, согласно программе , выдает координаты конечной точки перемещения Х, X,j в цифровой форме в виде чисел N. Эти числа вводятся в регистры 20 и 21 блока 11 коррекции и запоминаются в счетчиках 13 и 14 блока 2 управлени Во время позиционирования по обеим координатам на вычитающие входы
и iN,j следующим образом
N, - N,,
uN
N,S. N,
логовых преобразователей
.(О
где NQ и - количество импульсов, поступивших на вычитающие входы счетчиков 13 и 14 по каналам обратных связей, соответствующие пройденному пути по каждой координате. I
Содержание счетчика 13 N, при помощи цифроаналогового преобразователя I5 преобразуется в аналоговый сигнал (напряжение) &Х, а содержание счетчика 14 &K,j при помощи цифро-аналогового преобразователя 16 - в аналоговый сигнал Снапряже- ние) uXj. Выходные сигналы цифроанасамым и скорость перемещения по каждой координате. Цифроаналоговые преобразователи I5 и 16 обеспечены схемами ограничения выходного сигнала на заданном уровне и аХ,, соответствующем максимально допустимым скоростям перемещения по каждой координате V , V (V. m-V )
«макс 5изд iMOKc гмиЯ - Максимальные скорости перемещения
по каждой координате определяются требованием технологического характера или из конструктивных соображений, в частном случае:
V V
(МаксOfwiKC,
Двухкоординатное позиционирование осуществляется по прямолинейной траектории в том случае, когда вектор V скорости перемещения расположен , на линии, соединяющей начальную точку, совпадающую с началом координат, с конечной точкой с координатами X , X (фиг.2). При этом точка С перемещается по линии ОА и, согласно подобию треугольников DAD и САБ, соблюдается условие
X,.-uXj- Xj AXj(,
0.
(2)
При смещении точки С с линии ОА вниз имеем
х,Х,,
о,
(3)
а при смещении ее с линии ОА вверх
х„ -лх
2IC
i о
(4)
Позиционирование осуществляется
Режим позиционирования и траектория перемещения обеспечипаются блоком 2 логики. Режим позиционирования определяется при помощи компараторов 26 и 27 и элементов И- НЕ 30 и 31. Когда , U,, на выходах обоих компараторов образ ются логические О, разрешающие пр хождение импульсов, генерируемых пр
по прямолинейной траектории с макси- образователямиЗи 4 напряжение - код,
мальным быстродействием, если перемещение по той координате, по которой соотношение заданного перемещения к максимально допустимой скорости больп1е, осуществляется с максимально допустимой скоростью, а скорость перемещения по другой координате поддерживается такой, чтобы соблюдалось условие (2).
Для достижения этой цели использован блок 11 коррекции и блок 12 логики, управляющие коммутаторами 5 и 6.
Блок коррекции при помощи регистров 21 и 20 запоминает числа N и N , соответствующие конечным координа
там заданной точки Х,, и Х,.,. Цифро- аналоговые преобразователи 23 и 22, в виде опорных напряжений которых использованы аналоговые сигналы л Х, и лХ , вьшолняют функции перемножителей, формирующих аналоговые сигна- лы N,-uX, Х,- ДХ и N-4X, Xj - AXj поступающие на входы сумматора 24, на выходе которого получаем сигнал
, дХ, дХ2- - Л.Х,
Согласно : изложенному tf, О, если изображающая точка С лежит на линии ОА, , О, если изображающая точка лежит ниже линии ОА и , О, если изображакяцая точка лежит .выше линии ОА.
Кроме этого, блок коррекции формирует сигнал
4 X,- т-лХ,,
по которому определяется режим позиционирования. Если -Uj 46j6 Uj, то позиционирование по обеим координатам происходит автономно и, если заданы перемещения большие, с максимально допустимыми скоростями по
каждой координате I,OM г и, перемещение по координате Х производится с максимально допустимой скоростью V. , а по координате
1 и о. НС
X, - со скоростью, обеспечивающей условие (2).
Режим позиционирования и траектория перемещения обеспечипаются блоком 2 логики. Режим позиционирования определяется при помощи компараторов 26 и 27 и элементов И- НЕ 30 и 31. Когда , U,, на выходах обоих компараторов образуются логические О, разрешающие прохождение импульсов, генерируемых преобразователямиЗи 4 напряжение - код,
15
20
25
30
35
0
5
через коммутаторы 5 и 6, на входы частот управляемых приводов 7 и 8. При больших рассогласованиях лХ, , лХ у ЯЪгходные напряжения преобразователей 15 и 16 ограничены на уровнях 1м 2MQice- соответствующих максимально допустимым скоростям по каждой координате.
Если Е и,переключается компаратор 27, формируя на выходе логическую 1, а на выходе компаратора 26 по-прежнему поддерживается логический О, определяющий логическую 1 на выходе элемента И-НЕ 30, разрешающего прохождение через коммутатор 5 управляющих импульсов на вход (частотно-управляемого) координатного привода 7, определяющих скорость по координате X,, при большом значении дХ,, равном максимапь- но допустимой скорости .Уровень сигнала на выходе элемента И-НЕ 31 зависит от уровня сигнала на выходе компаратора 29. В начальный момент двухкоординатного позиционирования (изображающая точка находится в начале координат, фиг.2), условие С2)
соблюдается независимо от того, какие заданы перемещения по каждой координате и сигналы на выходах коммутаторов 28 и 29 соответствуют логическому О. Вследствие этого на выходе элемента И-НЕ 31 формируется логическая 1, разрешающая прохождение на вход частотно-управляемого привода 8 управляющих импульсов с преобразователя 4 с частотой, определяющей скорость перемещения по - направлению Xj. При большом значении Д.Х 2 скорость перемещения будет равной 2тлкс и траектория двухкоординатного позиционирования отклоняется от линии, соединяющей начало координат с конечной точкой позиционирования, и проходит выше, пока отклонение от траектории по оси X не достигает установленного уровня Si / , соответствующего сигналу c, - и, .равному сигналу срабатывания компаратора 29. Компаратор переключается и формирует на выходе сигнал, соответствутотций логической 1. При этом на выходе элемента К-НЕ 31 уровень сигнала становится равным логическому О и.прекращает поступление управляющих импульсов на вход привода 8. Скорость по координате X 2 начинает уменьшаться, изображающая точка приближается к заданной линейной траектории и сигнал на выходе первого сумматора 24 Е, уменьшается. Это происходит до тех пор, пока сигнал , не достигнет уровня сигнала отключения .компаратора 29, обусловливаемого величиной гистерезиса компаратора - uU .Затем компаратор 29 отключается снова и на вход привода 8 начинают поступать управляющие импульсы и изображающая точка опять начинает отклоняться от заданной траектории до нового ера-, батьгоания компаратора 29. Благодаря этому средняя частота поступления импульсов на вход привода 8 уменьшается и средняя скорость перемещения по данной координате соответствует прямолинейной траектории позиционирования.
Jlcли 2 Ug,переключается компаратор 26, формируя на выходе сигнал уровня логической ), а уровень сигнала на выходе компаратора 27 соответствует логическому О. Вследствие этого сигнал на выходе, элемента И-НЕ 31 равен логической 1 -и коммутатор 6 разрешает поступление импулсьов управления на вход частотно-управляемого привода 8. Частота импульсов при. большом лХ соответств ует максимально допустимо скорости перемещения по координате
По мере отклонения траектории от линии, соединяющей начало координат с конечной точкой позиционирования на величину , /N: соответствую 15ую сигналу срабатьгоания компаратора 28 и,,последний переключается и формирует на выходе сигнал, соответствующий логической 1. При этом на выходе элемента И-НЕ 30 уровень сигнала становится равным уровню логического О и прекращает поступление управляющих импульсов на вход частотно-управляемого привода 7 через коммутатор 5. Дальнейший процесс формирования траекто
5
0
5
0
5
рии происходит аналог ично описанному, когда г Ui ..
Направление перемещения по каждой координате задается блоком 1 управления дискретными сигналами, поступающими на знаковые входы приводов 7 и 8 по соответствующим каналам, причем сигнал, равный логическому О, обуславливает перемещение в положительном направлении, а сигнал, равный логической 1, - в отрицательном направлении.
Траектории двухкоординатного позиционирования, когда заданы поло- .жительные направления перемещения по обеим координатам, представлены на фиГдЗ. Вектор максимал1 ной скорости V,+ j V разделяет область Х,ОХ на два сектора. Когда заданная точка находится в первом секторе точка ), перемещение по оси X, происходит с максимально допустимой, скоростью V . Если не учитьшать фильтрующие свойства частотно-управляемого привода, траектория позиционирования будет состоять из участков, параллельных вектору максимальной скорости V (коммутаторы 5 и 6 разрешают прохождение на вхоДы приводов 7 и 8 управляющих импульсов) и участков, параллельных оси Х (коммутатор 6 не разрешает прохождение импульсов на вход привода 8). Когда заданная точка находится в секторе 11 (точка F) перемещен ие по оси X происходит с максимально допустимой скоростью
V
,а траектория позиционирования
0
50
5
2МОКЯ
состоит из участков, параллельных вектору максимальной скорости У(яако и оси Х.
Ввиду инерционности.приводов траектории перемещения будут приближаться к синусоидальным кривым, амплитуды которых определяются величиной гистерезиса компараторов 28 и 29. С уменьшением величины гистерезиса Ui и ts.lj упомянутых компараторов траектории перемещения приближаются к прямым линиям ОЕ и OF.
При подходе к заданной точке (Е или F) сигнал Е, на входе компараторов 26 и 27 уменьшается
до уровня
- u-,,.f
Ц
2, на выходах
обоих компараторов формируются логические О, что соответствует логическим 1 на выходах элементов
71288653
И-НЕ 30 и 31 и разрешению прохождения импульсов на входы обоих приводов 7 и 8. Позиционирование завершается по обеим координатам автономно, что исключает отрицательное влияние предлагаемой системы на точность позиционирования .
Если заданная точка находится в заштрихованной зоне (фиг.З), позиционирование происходит автономно по обеим координатам с максимально допустимыми скоростями по каждой из них.
W
По достижении конечных координат заданной точки на выходах логических элементов ИПИ-НЕ 17 и 18 формируются логические 1, поступающие на вход элемента И 19 и формирующие сигнал об окончании позиционирования блоку 1 управления.
15
20
тем, что, с целью повышения точности позиционирования и упрощения устройства, введены четыре компаратора,, два элемента И-НЕ, два сумматора и первый и второй преобразователи напряжение - частота, подключенные выходами к информационным входам соответственно первого и второго коммутаторов, соединенных управляющими входами с выходами соответственно первого и второго элементов И-НЕ, -подключенных первыми входами к вькодам соответственно первого и второго компараторов, а вторыми входами - к выходам соответственно третьего и четвертого компараторов, соединенных входами с первыми входами соответственно второго и первого компараторов и с выходами соответственно первого и второго сумматоров, причем первый и второй входы второго сумматора подключены к Формула изобретения выходам соответственно первого цифро аналогового преобразователя и втоУстройство двухкоординатного пози- Рого цифроаналогового преобразовате- ля, связанного вторым входом с первым выходом блока управления, с входом первого преобразователя напряжение - частота и с первым входом первого сумматора, подключенного вто- рьш входом к выходу масштабного усилителя, связанного входом с вторым выходом блока управления, с входом второго преобразователя напряжение - частота и с вторым входом первого цифроаналогового преобразователя, третий и четвертьй выходы блока ввода подключены к знаковым входам соответственно первого и второго координатных приводов, а вторые входы первого, второго, третьего и четвертого компараторов - соответственно к первому, второму, третьему и четвертому входам опорного напряжеционирования, содержащее блок ввода, подключенньй входом к первому выходу блока управления, первым и вторым выходами - соответственно к первому и второму информационным входам блока управления и к входам соответственно первого и второго регистров, соединенных выходами с первыми входами соответственно первого и второго цифроаналогового преобразователей, первый и второй сумматоры, первьхй и второй коммутаторы, подключенные выходами к информационным входам соответственно первого и второго координатных приводов, кинематически связанных соответственно с первым и вторым датчиками перемещения, подключенных выходами соответственно к третьему и четвертому входам блока управления, отличающееся
30
35
40
45
ния устройства.
15
20
30
35
40
Рого цифроаналог ля, связанного в вым выходом блок дом первого прео ние - частота и первого сумматор рьш входом к вых лителя, связанно выходом блока уп второго преобраз частота и с втор цифроаналогового третий и четверт да подключены к ответственно пер ординатных приво первого, второг вертого компарат но к первому, вт четвертому входа
5
ния устройства.
Иг
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Система для двухкоординатного позиционирования | 1984 |
|
SU1249484A1 |
| Устройство для контроля средств числового программного управления | 1988 |
|
SU1675852A1 |
| Устройство для оптической записи и воспроизведения информации на дисковый носитель | 1986 |
|
SU1571664A1 |
| Устройство для двухкоординатного программного управления | 1979 |
|
SU860007A1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Двухкоординатная система для программного управления | 1985 |
|
SU1249483A1 |
| Двухкоординатное устройство для программного управления | 1984 |
|
SU1193644A2 |
| Устройство для считывания графической информации | 1973 |
|
SU667976A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
Изобретение относится к автоматическому управлению и может быть использовано в программных системах двухкоординатного позиционирования, в частности в координатно-сверлиль- ных, координатно-расточных станках, для управления манипуляторами и т.п. Цель изобретения - повышение точности позиционирования и упрощение устройства. Устройство содержит блок ввода, блок управления, преобразователи напряжение - частота, коммутаторы, координатные приводы, датчики положения, блок коррекции, логический блок. Блок управления состоит КЗ двух счетчиков импульсов, двух преобразователей код,- напряжение, двух элементов ИЛИ-НЕ и элемента И. Блок коррекции содержит регистры, два преобразователя код - напряжение, первый и второй сумматоры, масштабный усилитель. Логический блок выполнен в виде четырех компараторов и двух элементов И-НЕ. Позиционирование ведется по прямолинейной траектории с максимальным быстродействием независимо от направления перемещения ввиду того, что при изменении направления позиционирования вектор скорости меняется и по аргументу и по модулю. 3 ил. SS (Л to 00 00 О5 сд со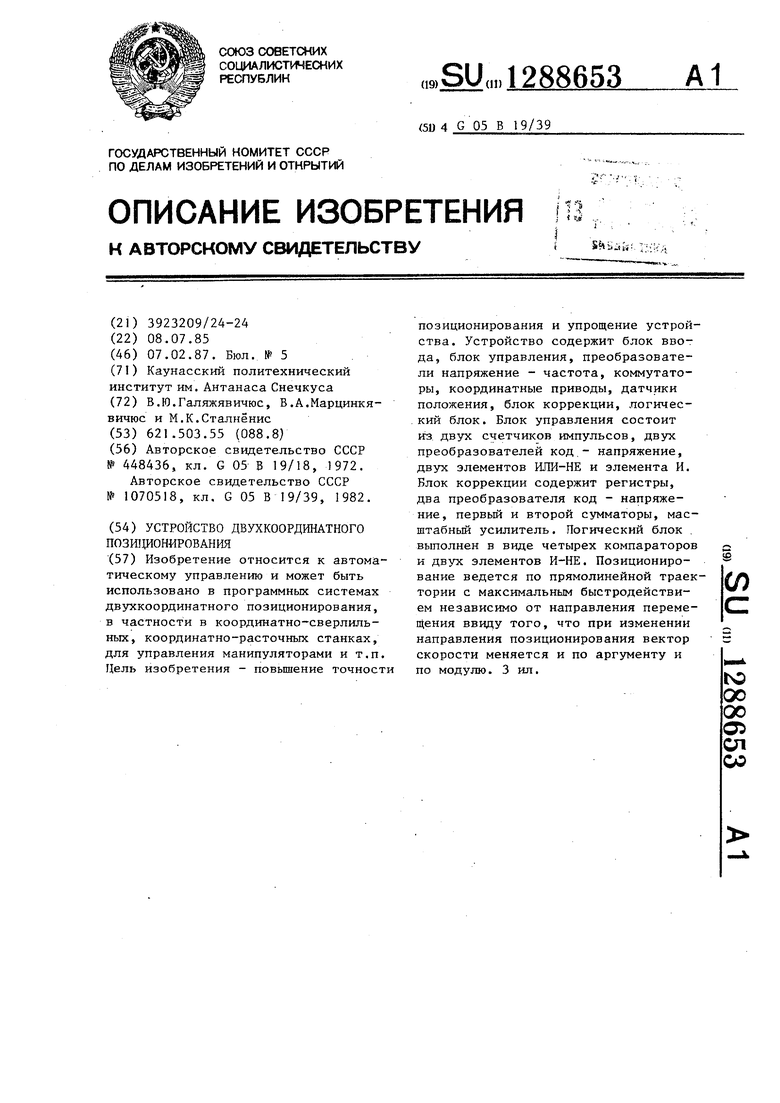
CPU2.3
Угтак
| Двухкоординатная система программного управления | 1972 |
|
SU448436A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для регулирования уровня в бьефе гидротехнического сооружения | 1982 |
|
SU1070518A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
