1
Изобретение относится к машиностроению и может быть использовано в приводах машин и механизмов в качестве бесступенчатой передачи.
Цель изобретения - повышение надежности путем уменьшения вибраций передачи, вызванных увеличением эксцентриситета, и уменьшения нагрузок на элементы регулирования.
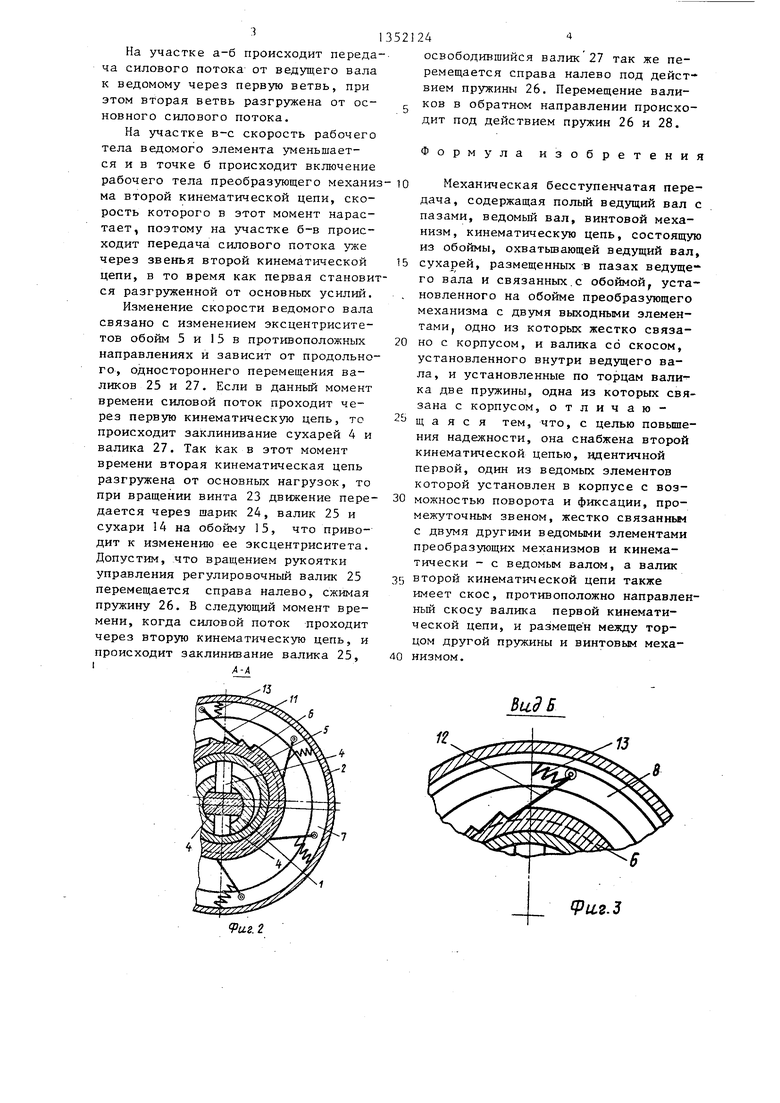
На фиг.1 изображена механическая бесступенчатая передача, продольный разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - вид Б но стрелке на фиг.1; на фиг.4 - разрез В-В на фиг.1; на фиг,5 - график изменения угловой скорости ведомого вала от времени.
1Механическая бесступенчатая передача содержит ведущий пустотельм
вал 1, который установлен в корпусе
2на подшипниках 3. От ведущего вала расходятся две идентичные кинематические цепи. Первая содержит сухари 4, установленные в пазах пустотелого ведущего вала 1. Снаружи к сухарям жестко прикреплена пустотелая обойма 5, на которой установлен преобразующий механизм . Преобразующий механизм включает в себя промежуточный вал, выполненный в Bi-ще двухве- нечного храпового колеса 6, установленного на обойме 5 с возможностью вращения. Зубья венцов храпового колеса 6 наклонены в противополож.вые стороны. Ведомый элемент 7 жестко связан с корпусом Л ведомый элемент .8 жестко связан с промежуточным звеном, выполненным в виде зубчатого колеса 9, которое связано с ведомым валом 10 зубчатой передачей. На ведомых элементах 7 и 8 шарнирно прикреплены рабочие тела 11 и 12, поджимаемые к зубчатым венцам храпового колеса 6 пружинами 13. Втора кинематическая цепь содержит сухари 14, установленные в пазах пустотелого ведущего вала 1. Снаружи к сухарям жестко прикреплена пустотелая обойма 15, на которой подвижно ( с возможностью вращенияj установлен промежуточный вал, вьтолненный в виде двухвенечного храпового колеса 16. Зубья венцов храпового колеса 16 наклонены в противоположные стороны. Ведомый элемент Г7 соединен с корпусом 2 с возможностью поворота и фиксируется в заданном положении механизмом 18 поворота.
52124 . 2
Ведомый элемент 19 жестко соеди- Г нен с зубчатым колесом 9. На ведомых элементах 17 и 19 шарнирно при- с креплены рабочие тела 20 и 21, поджа10
15
20
30
тые к зубьям пружинами 22. Рабочие тела 20 установлены в одном направлении с рабочими телами 11, а рабочие тела 21 - с рабочими телами 12.
Внутри пустотелого ведущего вала 1 размещены винт 23, связанный подвижно через шарик 24 с валиком 25, который через пружину 26 взаимодействует с валиком 27. Пружина 28 обеспечивает силовое замыкание, а ее жесткость меньше жесткости пружины 26. Валики 25 и 27 выполнены с противоположными скосами , которые подвижно контактирук1Т с сухарями Л и 14.
Механическая бесступенчатая передача работает следующим образом.
При вращении ведущего вала 1 и наличии эксцентриситетов обойм 5 25 и 15, которые задаются смещением сухарей 4 и, 14 в пазах вала за счет продольного перемещения валиков 25 и 27, движение передается через храповые колеса 6 и 16, рабочие тела 1 1 , 12 и 20 и 21, ведомые элементы 8 и 19 преобразующих механизмов на зубчатое колесо 9 и через зубчатую передачу на ведомый вал 10. При этом в преобразующих механизмах в зацеплении с зубьями двухвенечных храповых колес находится то из ра-- бочих тел, у которого свободный конец имеет наибольшую скорость.
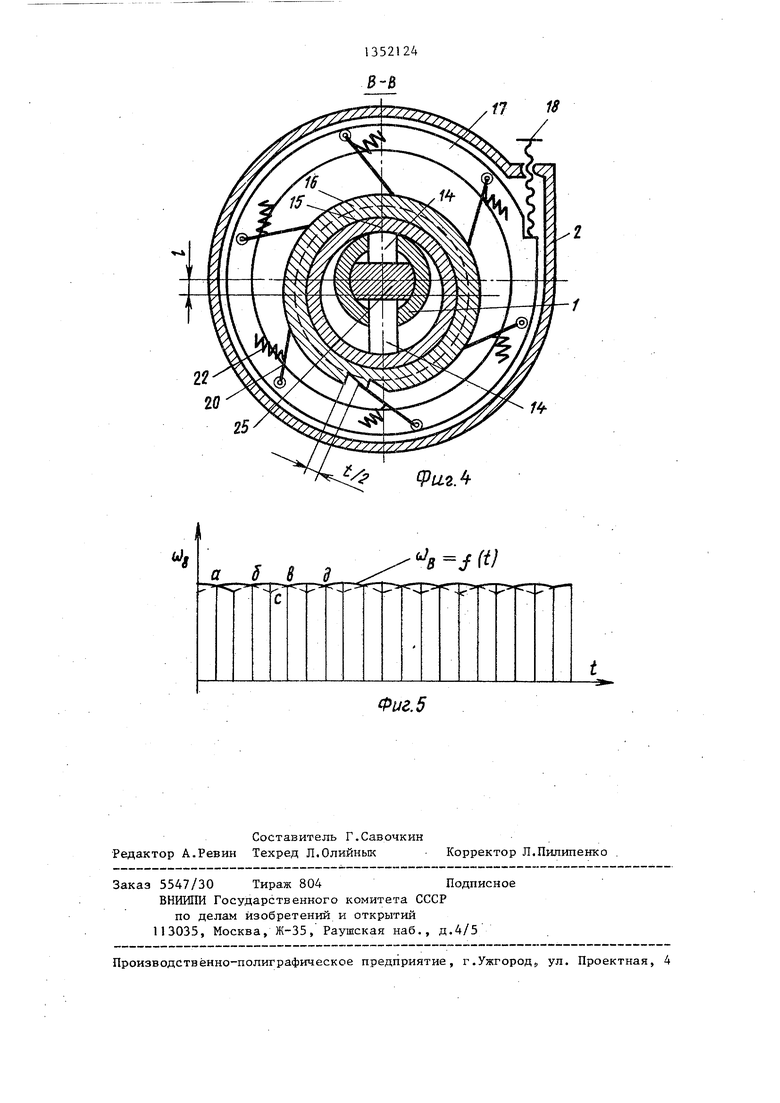
Механизм 18 поворота смещают 40 вокруг своей оси, при этом ведомый элемент 17 преобразующего механизма, соединенный с корпусом 2, вместе с закрепленными на нем рабочими телами 20 смещается таким образом, что 45 при контакте рабочего тела, имеющего наибольшую скорость, с зубьями венцов храпового колеса 6 первой цепи смещение между рабочими телом, имеющим наибольшую скорость, и боко- gQ вой поверхностью зуба по второй цепи равно половине шага храпового колеса, т.е. t/2.npH таком смещении ведомого элемента преобразующего механизма силовой поток проходит пооче- gg редно через первую и вторую кинематические цепи и график IA f(t) изменения угловой скорости ведомого вала имеет вид, изображенный на фиг.5 сплошной линией.
35
На участке а-б происходит передача силового потока от ведущего вала к ведомому через первую ветвь, при этом вторая ветвь разгружена от ос- новного силового потока.
На участке в-с скорость рабочего тела ведомого элемента уменьшается и в точке б происходит включение рабочего тела преобразующего механи ма второй кинематической цепи, скорость которого в этот момент нарастает, поэтому на участке б-в происходит передача силового потока уже через звенья второй кинематической цепи, в то время как первая становися разгруженной от основных усилий. Изменение скорости ведомого вала связано с изменением эксцентриситетов обойм 5 и 15 в противоположных направлениях и зависит от продольного, одностороннего перемещения валиков 25 и 27. Если в данный момент времени силовой поток проходит через первую кинематическую цепь, то происходит заклинивание сухарей 4 и валика 27. Так как в этот момент времени вторая кинематическая цепь разгружена от основных нагрузок, то при вращении винта 23 движение пере дается через шарик 24, валик 25 и сухари 14 на обойму 15, что приводит к изменению ее эксцентриситета. Допустим, что вращением рукоятки управления регулировочный валик 25 перемещается справа налево, сжимая пружину 26. В следующий момент времени, когда силовой поток проходит через вторую кинематическую цепь, и происходит заклинивание валика 25,
did
/J
}1
9и.г.2
24-
освободившийся валик 27 так же перемещается справа налево под деист- вием пружины 26. Перемещение валиков в обратном направлении происходит под действием пружин 26 и 28.
Формула изобретения
Механическая бесступенчатая передача, содержащая полый ведущий вал с пазами, ведомый вал, винтовой механизм, кинематическую цепь, состоящую из обоймы, охватьшающей ведущий вал, сухарей, размещенных в пазах ведуще го вала и связанных.с обоймой, установленного на обойме преобразующего механизма с двумя выходными элементами, одно из которых жестко связано с корпусом, и валика со скосом, установленного внутри ведущего вала, и установленные по торцам вали ка две пружины, одна из которых связана с корпусом, отличающаяся тем, что, с целью повышения надежности, она снабжена второй кинематической цепью, идентичной первой, один из ведомых элементов которой установлен в корпусе с возможностью поворота и фиксации, промежуточным звеном, жестко связанньм с двумя другими ведомыми элементами преобразующих механизмов и кинематически - с ведомым валом, а валик второй кинематической цепи также имеет скос, противоположно направленный скосу валика первой кинематической цепи, и размещен между торцом другой пружины и винтовым механизмом.
8
9 42.3
2
20
25
IS
f
uzA
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 1990 |
|
RU2018746C1 |
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2179674C2 |
| Механическая бесступенчатая передача | 1980 |
|
SU977885A1 |
| ВАРИАТОР | 1997 |
|
RU2151934C1 |
| Импульсный вариатор | 1980 |
|
SU968549A1 |
| Автоматическая бесступенчатая передача | 1985 |
|
SU1227876A1 |
| СПОСОБ БЕССТУПЕНЧАТОГО ИЗМЕНЕНИЯ ПЕРЕДАЧИ ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2391587C1 |
| Импульсная передача | 1984 |
|
SU1165842A1 |
| БЕССТУПЕНЧАТЫЙ ВАРИАТОР КРУТЯЩЕГО МОМЕНТА ЧУРИКОВА | 1993 |
|
RU2100241C1 |
| МЕХАНИЧЕСКАЯ АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1993 |
|
RU2083385C1 |
Изобретение относится к машиностроению и может быть использовано в приводах машин и механизмов в ка - честве бесступенчатой передачи. Оно позволяет повысить надежность путем уменьшения вибраций передачи, вызванных увеличением эксцентриситета и уменьшения нагрузок на элементы регулирования. Передача выполнена с двумя идентичными кинематическими цепями, по которым передается вращение от ведзтцего вала I к ведомому валу 10. Кинематические цепи имеют возможность регулирования передаточного отношения при помощи валиков 25 и 27, имеющих противоположно направленные скосы. Ведомые элементы 8 и 19 жестко связаны с зубчатым коле-.; сом 9, которое связано с ведомым валом 10 зубчатой передачей. Ведомый элемент 17 соединен с корпусом 2 с возможностью поворота и фиксируется в заданном положении механизмом поворота. При вращении ведущего вала 1 и наличии эксцентриситетов обойм 5 и 15 движение передается через храпо - вые колеса 6 и 16, рабочие тела 11, 12 и 20, 21, ведомые элементы 8 и I9 на зубчатое колесо 9 и через зубчатую передачу на ведомый вал 10. 5 ил. i (Л гв г т,2 . 111 nil II со ел tsD ю 4 го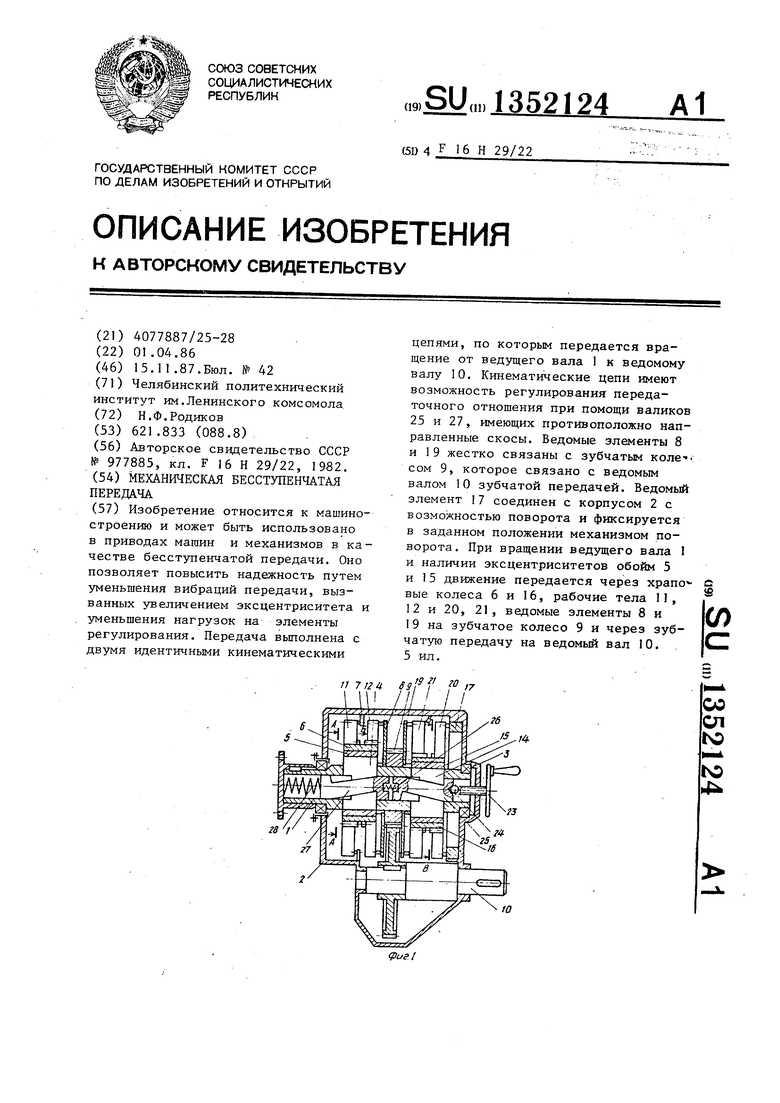
u)i
a S § S
Составитель Г.Савочкин Редактор А.Ревин Техред Л.Олийнык Корректор Л.Пилипенко
Заказ 5547/30 Тираж 804Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород,, ул. Проектная, 4
B -J W
Фиг. 5
| Механическая бесступенчатая передача | 1980 |
|
SU977885A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
