Изобретение относится к машиностроению и может быть использовано в трансмиссиях различных машин, станков и других устройствах в качестве импульсной безступенчатой передачи.
Известны импульсные вариаторы непрерывного действия с зубчатым зацеплением, в которых равномерное вращение ведомого вала преобразуется в сплошное плоско-параллельное движение промежуточного вала, которое в свою очередь посредством выходного преобразователя преобразуется во вращательное движение ведомого вала (1).
Известны также вариаторы, использующие различные конструкции рабочих органов (ролики, клинья, пружины и т.п.), различные схемы, содержащие храповые механизмы и механизмы свободного хода. Например, авторские свидетельства СССР NN 257 233, 302 525, 489 892, 759 769, 546 749, 346 483, 498 430, 546 749, 3 714 834, 482 585, 503 065, 618 588, Патент США N 3 714 834, заявка России N 94 038 398, F 16 D 41/12, 20.08.96, Бюл. N 23.
Однако, вышеперечисленные технические решения имеют недостатки, ограничивающие их надежность, долговечность и эффективность (недостаточная нагрузочная способность, наличие больших ударных напряжений, недостаточная скорость срабатывания рабочих тел, сложность конструкции и т.п.).
Известно также устройство свободного хода, содержащее упругую кольцевую обойму в виде гибкой оболочки, звездочку, расположенную внутри обоймы соосно с последней, и подпружиненные цилиндрические ролики, образованные выемками на звездочке, и снабженное кольцевым ободом, расположенным концентрично звездочке и жестко соединенным с ней. Причем гибкая кольцевая обойма - оболочка установлена с возможностью фрикционного взаимодействия с внутренней поверхностью кольцевого обода (описание изобретения к патенту РФ N 2 055 244, 6 F 16 D 41/07, 27.02.96, Бюл. N 6). Однако, данное устройство обладает недостаточной нагрузочной способностью и надежностью, в частности, силы трения, возникающие на поверхности гибкой упругой кольцевой обоймы - оболочки, повреждают ее, а заклинивающие ролики периодически (в момент заклинивания) изгибают эту обойму, что приводит к ее деформации и разрушению, ограничивая тем самым срок службы устройства и его надежность.
Наиболее близким по технической сути к заявляемому изобретению является вариатор, содержащий обойму с внутренней цилиндрической поверхностью, валы, на ведущем из которых установлены по меньшей мере два ролика-сателлита с возможностью перемещения в радиальном направлении посредством механизма управления и вращения вокруг своей оси, параллельной оси вала, на ведомом валу размещено гибкое кольцо, охватывающее ролики-сателлиты, и кинематически связанное с обоймой посредством выполненных на одном из них (кольце или обойме) упругих выступов, наклонных к поверхности обоймы, угол наклона которых изменяется посредством механизма управления (авторское свидетельство СССР N 1 084 519, 17.04.1973, F 16 H 15/00).
Однако данный вариант обладает невысокой нагрузочной способностью вследствие фрикционного характера взаимодействия гибкого кольца и обоймы.
Целью предлагаемого изобретения является повышение нагрузочной способности механизма.
Целью предлагаемого изобретения является повышение нагрузочной способности механизма.
Указанная цель достигается тем, что в заявленном вариаторе, содержащем обойму с внутренней цилиндрической поверхностью, размещенные внутри обоймы вал с по меньшей мере двумя роликами-сателлитами, размещенными на нем с возможностью перемещения в радиальном направлении и вращения вокруг своей оси, параллельной оси вала, и вал с гибким кольцом, кинематически связанным с обоймой и захватывающим ролики - сателлиты, на наружной поверхности гибкого кольца выполнен храповой зубчатый венец, а кинематическая связь гибкого кольца с обоймой выполнена в виде собачек, установленных на внутренней цилиндрической поверхности обоймы под углом к ней и подпружиненных к центру обоймы.
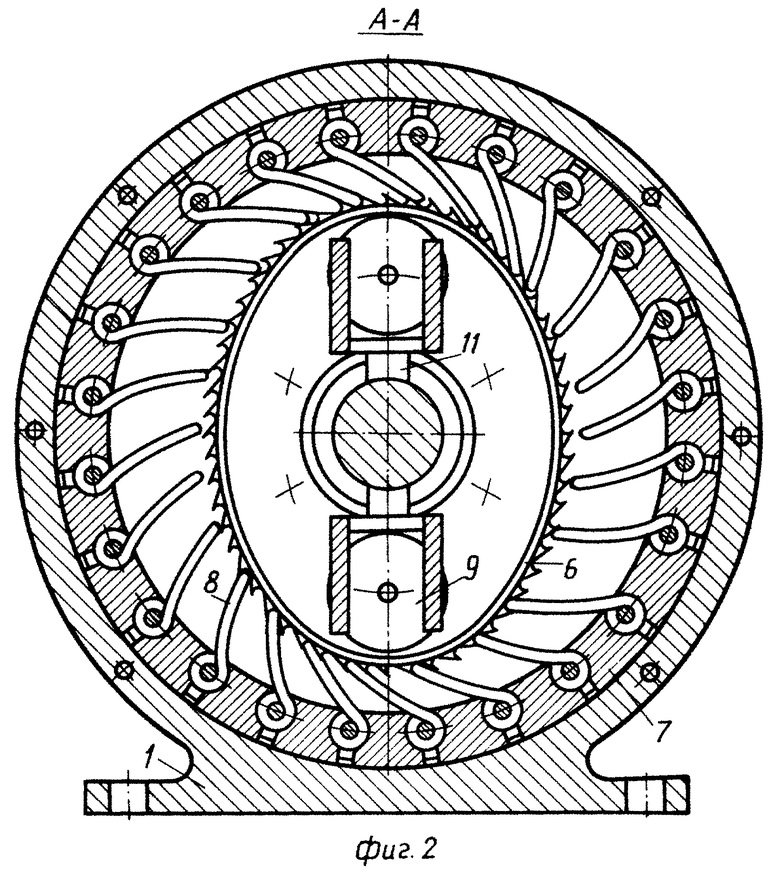
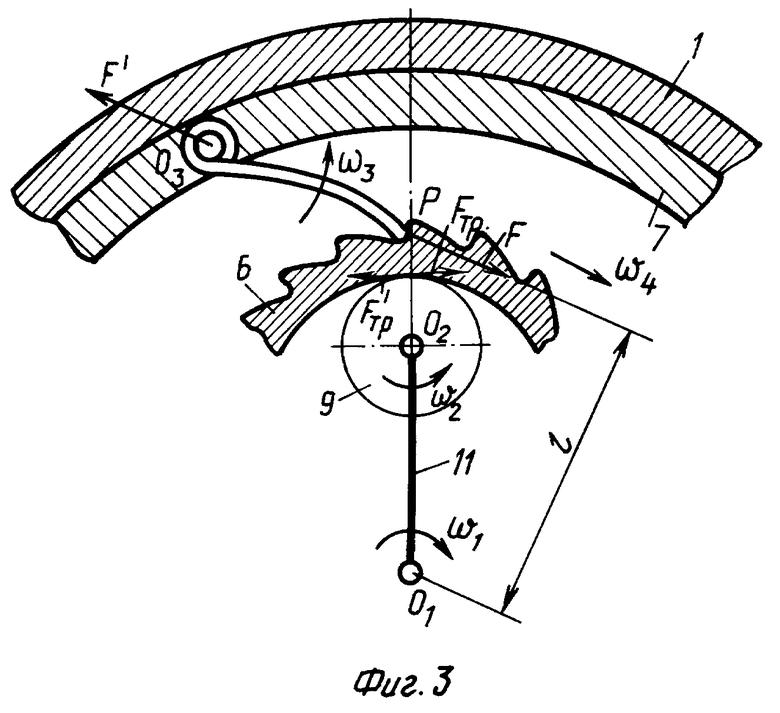
На фиг. 1 изображен храповой механизм (вариатор) с неподвижной цилиндрической обоймой и подвижным гибким кольцом, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - план сил в храповом зацеплении.
Заявляемый механизм содержит корпус 1, крышку корпуса 2, ведущий вал 3, ведомый вал 4, гибкое кольцо 5 с храповым зубчатым венцом 6, цилиндрическую обойму 7, установленные на ней под углом с возможностью вращения и подпружиненные к центру обоймы собачки 8, ролики-сателлиты 9, механизм регулирования 10, звено 11 (подвижные кривошипы роликов - сателлитов).
Заявляемый вариатор работает следующим образом.
Гибкое кольцо соединено с ведомым валом, цилиндрическая обойма неподвижна (см. фиг. 1, 2, 3), например, жестко соединена с корпусом вариатора.
При введении механизма регулирования 10 роликов-сателлитов 9 внутрь гибкого кольца 5 последнее выгибается и приобретает форму эллипсоида (см. фиг. 2). Силы натяжения гибкого кольца прижимают ее к роликам-сателлитам 9. При этом между ними в точке контакта возникают силы трения (сначала покоя, затем качения) Fтр, приложенная к гибкому кольцу, и Fтр, приложенная к ролику. Кроме того, в этот момент гибкое кольцо своим зубчатым храповым венцом вступает в контакт с подпружиненными собачками 8 в своей апогейной части (в т. P).
Собачки отжимаются к внутренней поверхности цилиндрической обоймы 7, поворачиваясь вокруг своей оси O3. В т. P - точке контакта собачки и храпового зубца зубчатого венца 6 кольца 5 возникают силы F и F . Сила F - сила, с которой собачка толкает гибкое кольцо 5 от себя, и сила F - сила, с которой гибкое кольцо воздействует на собачку. Эта сила передается на ось собачки O3 и создает крутящий момент Mкр = F l (см. фиг. 3), который стремится повернуть обойму 7 в противоположную повороту кольца 5 сторону. В момент силового контакта сила F поворачивает гибкое кольцо на некоторый дискретный угол относительно т. O1, создавая на ведомом валу 4 крутящий момент и поворачивая этот вал на некоторый угол по часовой стрелке (см. фиг. 3). При вращении ведущего вала 3 по часовой стрелке ролик-сателлит 9, будучи связанным с ведущим валом посредством звена 11, начинает вращаться вокруг оси O2 под действием силы F'тр, приложенной к нему, и катится по внутренней поверхности гибкого кольца, изгибая последнюю плавно и непрерывно по всей окружности. При этом последовательно друг за другом вступают в силовой контакт собачки обоймы и храповые зубья гибкого кольца. В результате этого импульсы сил, возникающие на каждой собачке, непрерывно поворачивают гибкое кольцо по часовой стрелке, обеспечивая равномерное вращение ведомого вала с определенной частотой и определенным крутящим моментом.
Регулируя механизмом 10 длины звеньев 11, можно плавно менять передаточное отношение, крутящий момент на ведомом валу и частоту его вращения.
Кроме того, если обойму 7 сделать подвижной, то в этом варианте она под действием силы F будет вращаться относительно т. O1 против часовой стрелки, а гибкое кольцо под действием силы F и Fтр - по часовой стрелке. При вращении ведущего вала против часовой стрелки гибкое кольцо вращается по часовой стрелке.
Предлагаемое техническое решение позволяет повысить нагрузочную способность механизма, обеспечить равномерность износа рабочих органов, в частности собачек, зубчатого храпового венца и внутренней цилиндрической поверхности гибкого кольца, и, как следствие, надежность, так как исключается фрикционное заклинивание, образование зон высокой концентрации напряжений, резкая деформация гибкого кольца. Кроме того, обеспечивается плавное регулирование крутящего момента, а также за счет изменения регулирования импульса силы и жесткости регулирующих пружин регулирование передаточного отношения вариатора.
Источники информации:
Леонов А. И., Дубровский А.Ф. Механические бесступенчатые передачи непрерывного действия. М., Машиностроение, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМОБИЛЬНЫЙ ВАРИАТОР | 1997 |
|
RU2127382C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1995 |
|
RU2087781C1 |
| Предохранительная муфта | 1982 |
|
SU1211493A1 |
| Храповой механизм свободного хода | 1983 |
|
SU1200028A1 |
| Бесступенчатый вариатор | 2019 |
|
RU2711843C1 |
| Вариатор скорости | 1985 |
|
SU1298463A1 |
| ШЕСТЕРЕННЫЙ НАСОС | 1991 |
|
RU2027909C1 |
| ФРИКЦИОННЫЙ РЕВЕРСИВНЫЙ ВАРИАТОР | 1995 |
|
RU2112900C1 |
| ЭЛЕКТРОМОБИЛЬНЫЙ ВАРИАТОР | 1998 |
|
RU2175415C2 |
| Механизм свободного хода | 1983 |
|
SU1171616A1 |
Изобретение относится к машиностроению. Вариатор содержит обойму, по меньшей мере два ролика-сателлита, размещенные на ведущем с возможностью перемещения в радиальном направлении и вращения вокруг своей оси, и гибкое кольцо. На наружной поверхности гибкого кольца выполнен храповой зубчатый венец. На внутренней цилиндрической поверхности обоймы под углом к ней установлены собачки, подпружиненные к центру обоймы. При силовом контакте собачек обоймы и храпового зубчатого венца гибкое кольцо равномерно вращается с определенной частотой и определенным крутящим моментом. Повышена нагрузочная способность вариатора. 3 ил.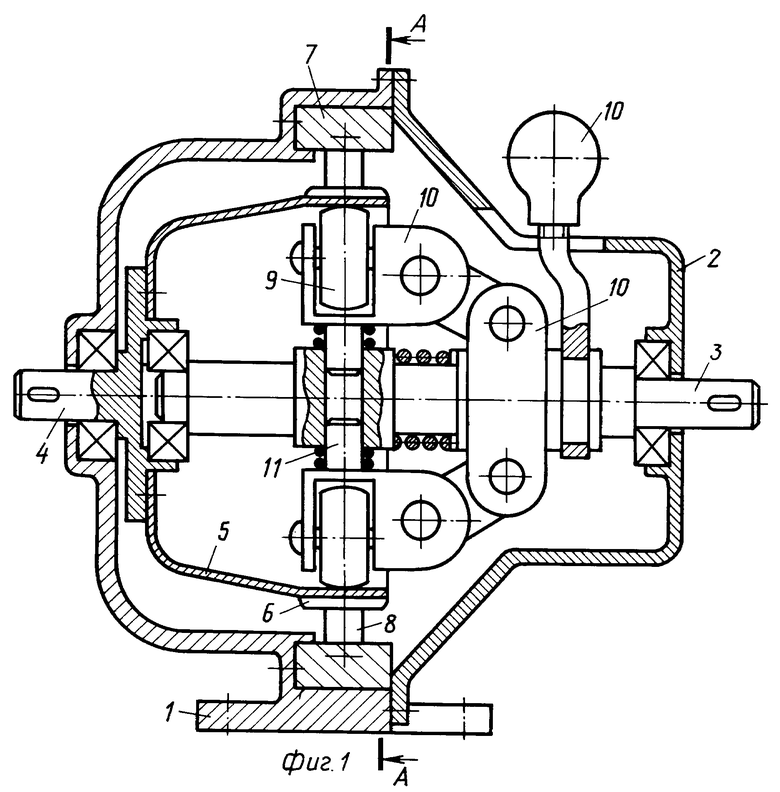
Вариатор, содержащий обойму с внутренней цилиндрической поверхностью, размещенные внутри обоймы вал с по меньшей мере двумя роликами-сателлитами, размещенными на нем с возможностью перемещения в радиальном направлении и вращения вокруг своей оси, параллельной оси вала, и вал с гибким кольцом, кинематически связанным с обоймой и охватывающим ролики-сателлиты, отличающийся тем, что на наружной поверхности гибкого кольца выполнен храповой зубчатый венец, а кинематическая связь гибкого кольца с обоймой выполнена в виде собачек, установленных на внутренней цилиндрической поверхности обоймы под углом к ней и подпружиненных к центру обоймы.
| SU, 1084519, A, 07.11.1984 | |||
| SU, 370391, A, 17.04.1973 | |||
| КРАЙНЕВ А.Ф | |||
| СЛОВАРЬ-СПРАВОЧНИК ПО МЕХАНИЗМАМ | |||
| - М.: МАШИНОСТРОЕНИЕ, 1987, с | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
