11354157
Изобретение относится к импульсной
10
15
технике и может быть использовано в радиотехнических устройствах измерения временных положений импульсов, входящих в состав радиогидролокацион- ной, радионавигационной и другой аппаратуры.
Цель изобретения - повышение точности измерения временного положения импульса неизвестной полярности при совместном воздействии адл,итивного широкополосного шума и модулирующей помехи за счет оптимального преобра- зования приходящего импульса.
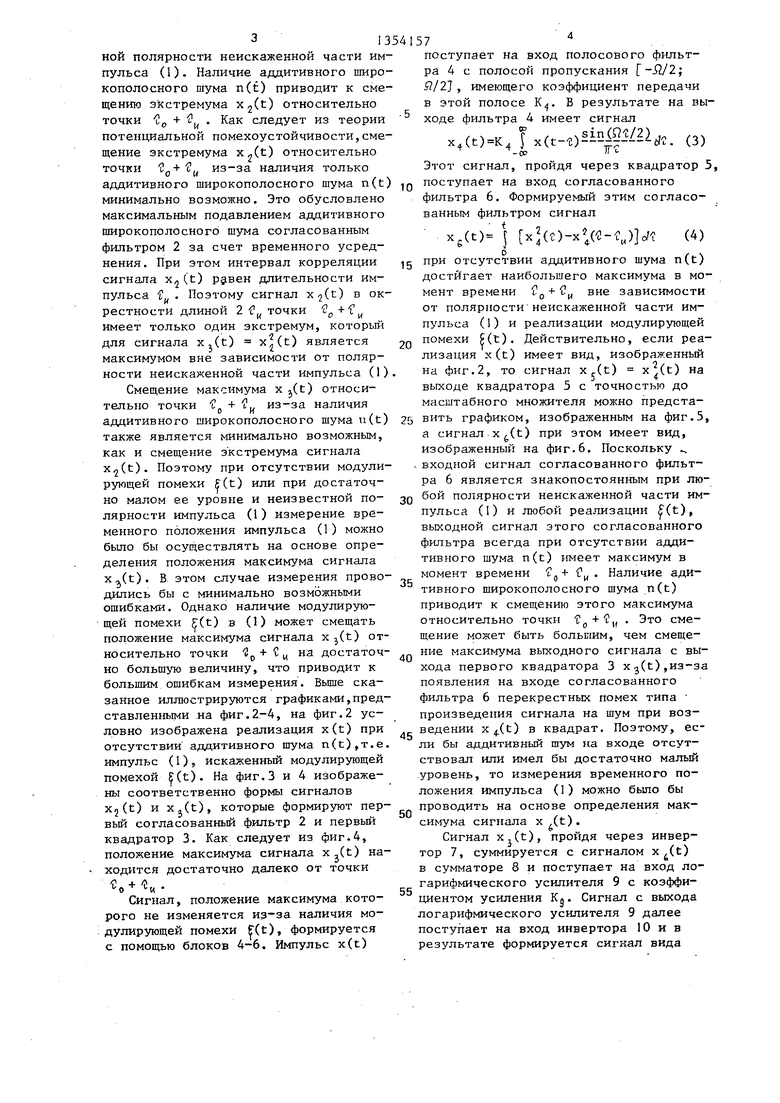
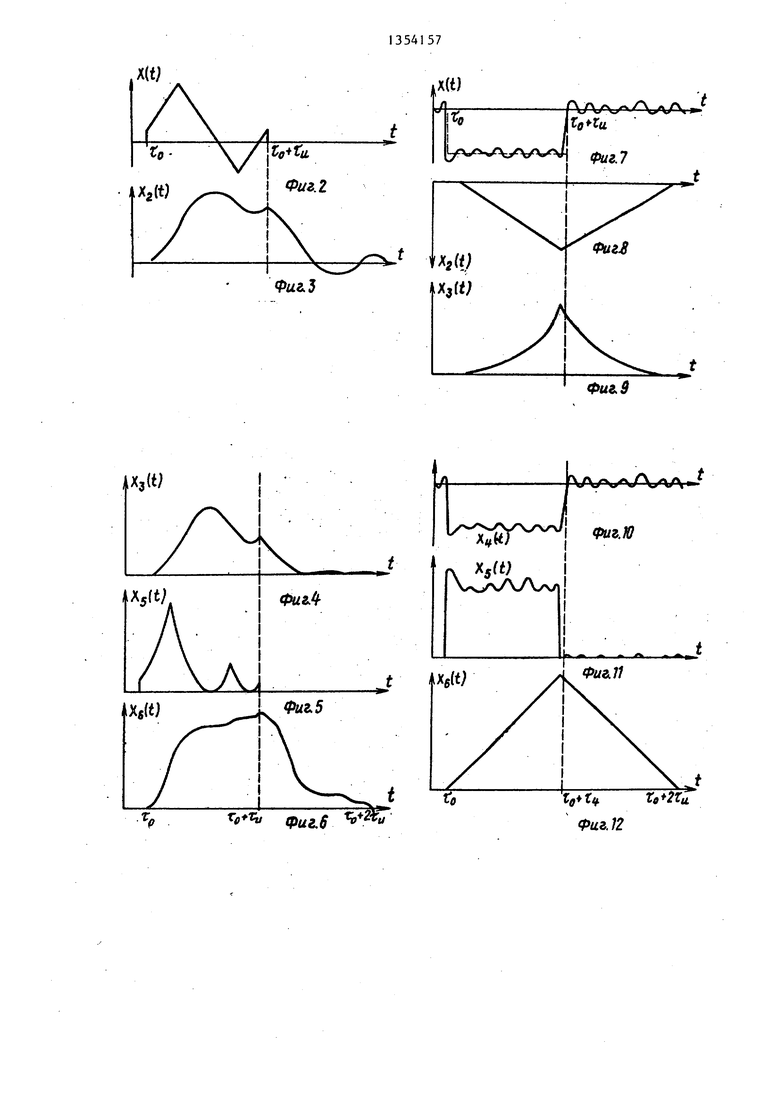
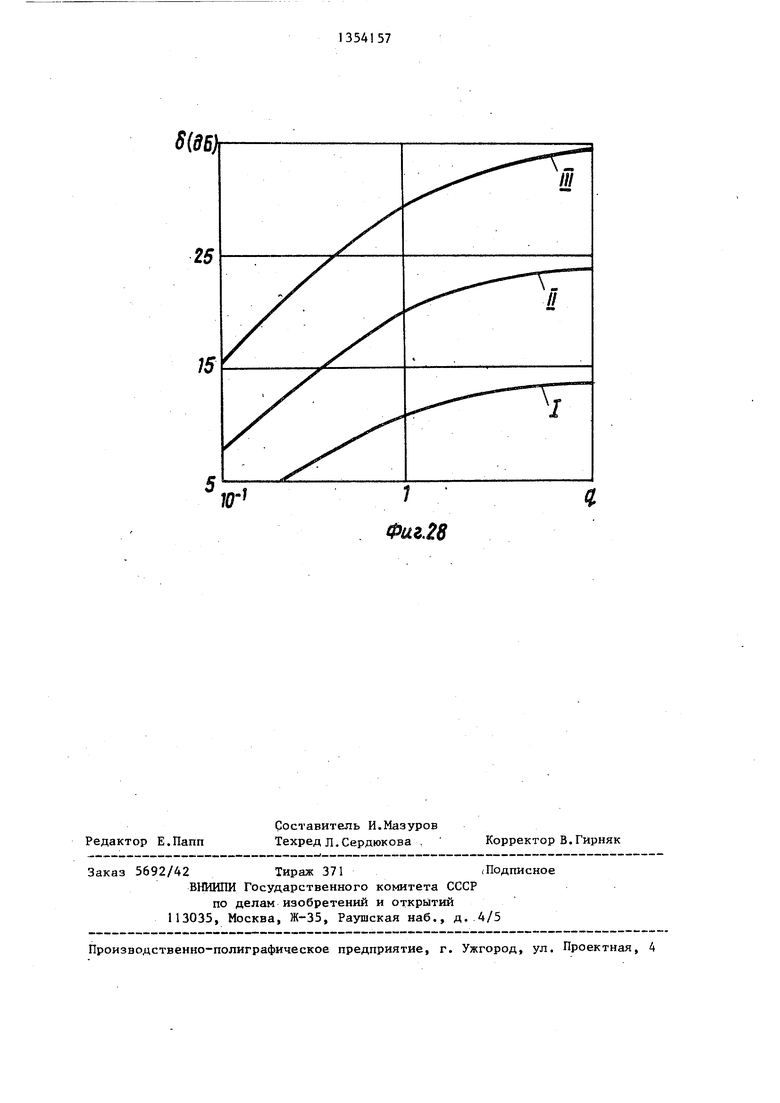
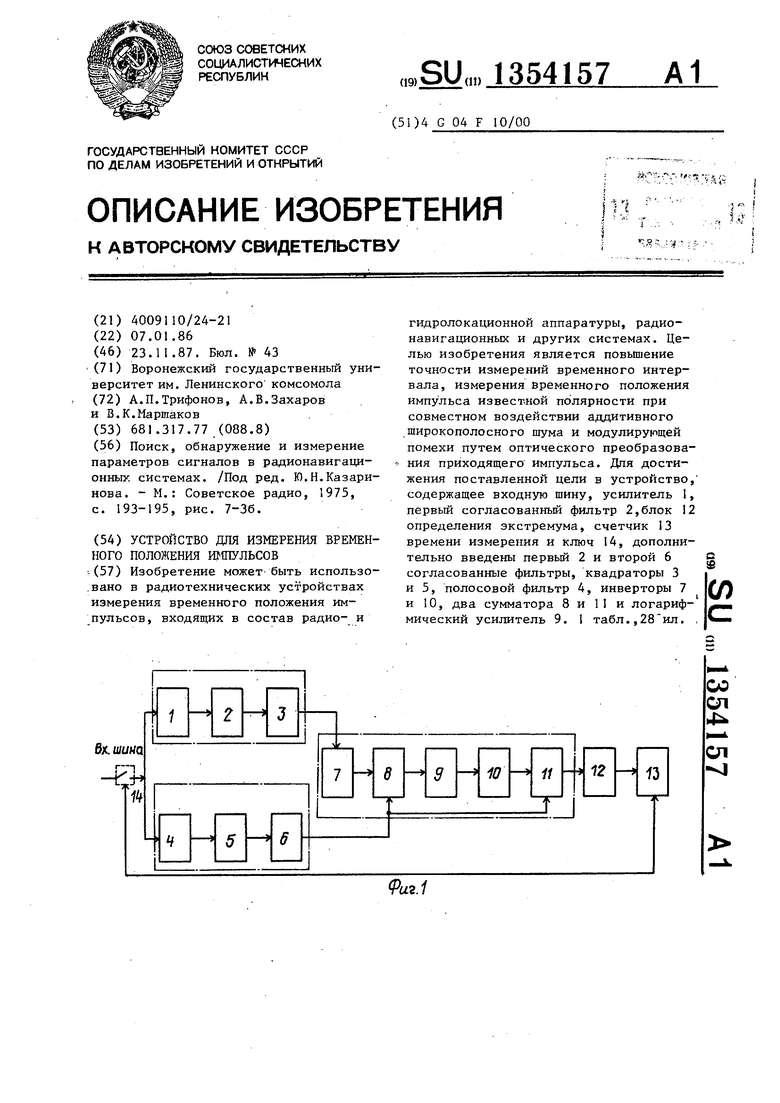
На фиг.1 изображена структурная схема устройства на фиг.2 - 27 - временные диаграммы, показывающие вид преобразований, которым подвергаются импульс и модулирующая помеха при 2о прохождении разных блоков в устройст- на фиг.28 - зависимость минимального выигрыша в точности измерения временного положения импульса в предлагаемом устройстве по сравнению с известным устройством от отношения мощности импульса, искаженного модулирующей помехой, к мощности неискаженной части импульса.
Устройство содержит входную шину, усилитель 1, первый согласованный фильтр 2, первый квадратор 3, полосовой фильтр 4, второй квадратор 5, второй согласованный фильтр 6, первый инвертор 7, первый сзгмматор 8, лога рифмический усилитель 9, второй инвертор 10, второй сумматор II, блок 12 определения экстремума, счетчик 13 времени измерения и ключ 14.
Входная шина устройства через ключ 14 соединена с входами усилителя 1 и полосового фильтра 4, выход усилителя 1 через согласованный . фильтр 2 подключен к входу квадратоУстрор1ство работает следующим образом.
При замыкании ключа 14 с входной шины на вход устройства поступает аддитивная смесь x(t) SCt-t) + n(t) импульса S(t - ) и широкополосного шума n(t) и одновременно включается счетчик 13 времени. Импульс S(t - Ср ), временное положение UP которого необходимо измерить, искажен модулирующей помехой так, что его можно описать формулой
S(t)
(t)
, .0,
(1)
t 0,,
где t - длительность импульса, U - неизвестная амплитуда неискаженной части импульса, знак + или - определяет полярность неискаженной части импульса, которая также неизвестна, (t) характеризует модулирующую помеху, обладающую неизвестным по- 25 стоянным спектром мощности, сосредоточенным в диапазоне частот -17/2; SI/2,
Через входную шину устройства и ключ 14 аддитивная смесь x(t) поступает на входы усилителя 1 и полосового фильтра 4. Выходные сигналы Xj(t) и X (t) первого квадратора 3 и согласованного фильтра 6 поступают на первый инвертор 7 и первый сумматор 8 соответственно. Сигнал x(t), снимаемый с сумматора 11, подается на блок 12 определения экстремума. Блок 12 выявляет положение наибольшего мак30
35
симума сигнала х (t), а счетчик 13
40
времени производит его временной отсчет и размьжает ключ 14, после чего устройство готово к следующему циклу измерений.
Входной сигнал x(t) подается на ра 3, выход которого через инвертор 7 , вход широкополосного усилителя I (с соединен с одним из входов суммато- коэффициентом усиления К,), выход которого подключен к входу согласованного фильтра 2. В результате на выхора 8, другой вход сумматора 8 подключен к второму входу сумматора 11 и к выходу согласованного фильтра 6,вход которого соединен через квадратор 5 с выходом полосового фильтра 4, выход сумматора 8 через логарифмический усилитель 9 соединен с входом инвер- тора 10, выход которого подьслючен к первому входу сумматора 1I, выход сумматора 11 через блок I2 определения экстремума соединен с входом - счетчика 13 времени, который соединен с входной шиной.
де последнего имеем сигнал 50 X2(t)K, J x( D)-x(-C)Jc/ C.
(2)
Далее сигнал XjCt) поступает на вход квадратора 3, на выходе которого фор55
мируется сигнал Xj(t) Xj(t).
В отсутствии аддитивного шума n(t) и моду,т1ирующей помехи fCt) сиг- .нал х (t) в момент времени имеет максимум при положительной полярности или минимум при отрицатель
Устрор1ство работает следующим образом.
При замыкании ключа 14 с входной шины на вход устройства поступает аддитивная смесь x(t) SCt-t) + n(t) импульса S(t - ) и широкополосного шума n(t) и одновременно включается счетчик 13 времени. Импульс S(t - Ср ), временное положение UP которого необходимо измерить, искажен модулирующей помехой так, что его можно описать формулой
S(t)
(t)
, .0,
(1)
t 0,,
где t - длительность импульса, U - неизвестная амплитуда неискаженной части импульса, знак + или - определяет полярность неискаженной части импульса, которая также неизвестна, (t) характеризует модулирующую помеху, обладающую неизвестным по- стоянным спектром мощности, сосредоточенным в диапазоне частот -17/2; SI/2,
Через входную шину устройства и ключ 14 аддитивная смесь x(t) поступает на входы усилителя 1 и полосового фильтра 4. Выходные сигналы Xj(t) и X (t) первого квадратора 3 и согласованного фильтра 6 поступают на первый инвертор 7 и первый сумматор 8 соответственно. Сигнал x(t), снимаемый с сумматора 11, подается на блок 12 определения экстремума. Блок 12 выявляет положение наибольшего мак
симума сигнала х (t), а счетчик 13
де последнего имеем сигнал 50 X2(t)K, J x( D)-x(-C)Jc/ C.
(2)
Далее сигнал XjCt) поступает на вход квадратора 3, на выходе которого фор55
мируется сигнал Xj(t) Xj(t).
В отсутствии аддитивного шума n(t) и моду,т1ирующей помехи fCt) сиг- .нал х (t) в момент времени имеет максимум при положительной полярности или минимум при отрицательной полярности неискаженной части импульса (I). Наличие аддитивного широкополосного шума n(t) приводит к смещению экстремума X2(t) относительно точки lip + { i , Как следует из теории потенциальной помехоустойчивости,смещение экстремума ) относительно точки ( из-за наличия только аддитивного широкополосного шума n(t) Q минимально возможно. Это обусловлено максимальным подавлением аддитивного широкополосного шума согласованным фильтром 2 за счет временного усреднения. При этом интервал корреляции сигнала х(t) рэвен длительности импульса fj . Поэтому сигнал ) в окрестности длиной 2 f точки
имеет только один экстремум, который
2,
15
для сигнала хЛс)
Xj(t) является
20
поступает на вход полосового фильтра 4 с полосой пропускания Я/2, имеющего коэффициент передачи в этой полосе К, В результате на вы ходе фильтра 4 имеет сигнал
x,(t)K,x(t-.)2isif: /21. 3)
Этот сигнал, пройдя через квадратор 5 поступает на вход согласованного фильтра 6. Формируемый этим согласованным фильтром сигнал
xg(t) x;(0-x(-i:,)c (4)
при отсутствии аддитивного шума n(t) достигает наибольшего максимума в момент времени и зависимости от полярности неискаженной части импульса (1) и реализации модулирующей помехи (t). Действительно, если реализация x(t) имеет вид, изображенный
на фиг.2, то сигнал х ..(t) x(t) на выходе квадратора 5 с точностью до масштабного множителя можно предстамаксимумом вне зависимости от полярности неискаженной части импульса (1)
Смещение максимума х j(t) относительно точки „ + ,. из-за наличия
Р л
аддитивного широкополосного шума и(t)25 вить графиком, изображенным на фиг.5,
также является минимально возможным,а сигнал x(t) при этом имеет вид,
как и смещение экстремума сигналаизображенный на фиг.6. Поскольку
). Поэтому при отсутствии модули--ВХОДНОЙ сигнал согласованного фильтрующей помехи f(t) или при достаточно малом ее уровне и неизвестной полярности импульса (1) измерение временного положения импульса (1) можно было бы осуществлять на основе определения положения максимума сигнала x,(t). В этом случае измерения проводились бы с минимально возможными ошибками. Однако наличие модулирующей помехи r(t) в (1) может смещать положение максимума сигнала х (t) относительно точки Зр + м на достаточно большую величину, что приводит к большим ошибкам измерения. Вьшге сказанное иллюстрируются графиками,представленными на фиг.2-4, на фиг.2 ус-
30
35
40
ра 6 является знакопостоянным при любой полярности неискаженной части импульса (1) и любой реализации f (t), выходной сигнал этого согласованного фильтра всегда при отсутствии аддитивного шума n(t) имеет максимум в момент времени { . Наличие ади- тивного широкополосного шума n(t) приводит к смещению этого максимума относительно точки Это смещение может быть большим, чем смещение максимума выходного сигнала с выхода первого квадратора 3 ),из-за появления на входе согласованного фильтра 6 перекрестных помех типа произведения сигнала на шум при возловно изображена реализация x(t) при ведении ) в квадрат. Поэтому, ес- отсутствии аддитивного шума п(ь),т.е. импульс (1)5 искаженный модулирующей помехой (t). На фиг.З и 4 изображены соответственно формы сигналов x,j(t) и Xj(t), которые формируют первый согласованньм фильтр 2 и первьм квадратор 3. Как следует из фиг.4,
ли бы аддитивный шум на входе отсутствовал или имел бы достаточно малый уровень, то измерения временного положения импульса (1) можно было бы проводить на основе определения максимума сигнала х (t).
Сигнал x,(t), пройдя через инвертор 7, суммируется с сигналом х ,(t) в сумматоре 8 и поступает на вход логарифмического усилителя 9 с коэффициентом усиления Кд. Сигнал с выхода логарифмического усилителя 9 далее поступает на вход инвертора 10 и в результате формируется сигнал вида
положение максимума сигнала Xj(t) находится достаточно далеко от точки
о + о О ч
Сигнал, положение максимума которого не изменяется из-за наличия мо- : дулирующей помехи (t), формируется с помощью блоков 4-6. Импульс x(t)
Q
5
0
поступает на вход полосового фильтра 4 с полосой пропускания Я/2, имеющего коэффициент передачи в этой полосе К, В результате на выходе фильтра 4 имеет сигнал
x,(t)K,x(t-.)2isif: /21. 3)
Этот сигнал, пройдя через квадратор 5, поступает на вход согласованного фильтра 6. Формируемый этим согласованным фильтром сигнал
xg(t) x;(0-x(-i:,)c (4)
при отсутствии аддитивного шума n(t) достигает наибольшего максимума в момент времени и зависимости от полярности неискаженной части импульса (1) и реализации модулирующей помехи (t). Действительно, если реализация x(t) имеет вид, изображенный
на фиг.2, то сигнал х ..(t) x(t) на выходе квадратора 5 с точностью до масштабного множителя можно предста-ВХОДНОЙ сигнал согласованного фильт0
5
0
ра 6 является знакопостоянным при любой полярности неискаженной части импульса (1) и любой реализации f (t), выходной сигнал этого согласованного фильтра всегда при отсутствии аддитивного шума n(t) имеет максимум в момент времени { . Наличие ади- тивного широкополосного шума n(t) приводит к смещению этого максимума относительно точки Это смещение может быть большим, чем смещение максимума выходного сигнала с выхода первого квадратора 3 ),из-за появления на входе согласованного фильтра 6 перекрестных помех типа произведения сигнала на шум при возведении ) в квадрат. Поэтому, ес-
5
ли бы аддитивный шум на входе отсутствовал или имел бы достаточно малый уровень, то измерения временного положения импульса (1) можно было бы проводить на основе определения максимума сигнала х (t).
Сигнал x,(t), пройдя через инвертор 7, суммируется с сигналом х ,(t) в сумматоре 8 и поступает на вход логарифмического усилителя 9 с коэффициентом усиления Кд. Сигнал с выхода логарифмического усилителя 9 далее поступает на вход инвертора 10 и в результате формируется сигнал вида
5 13541576
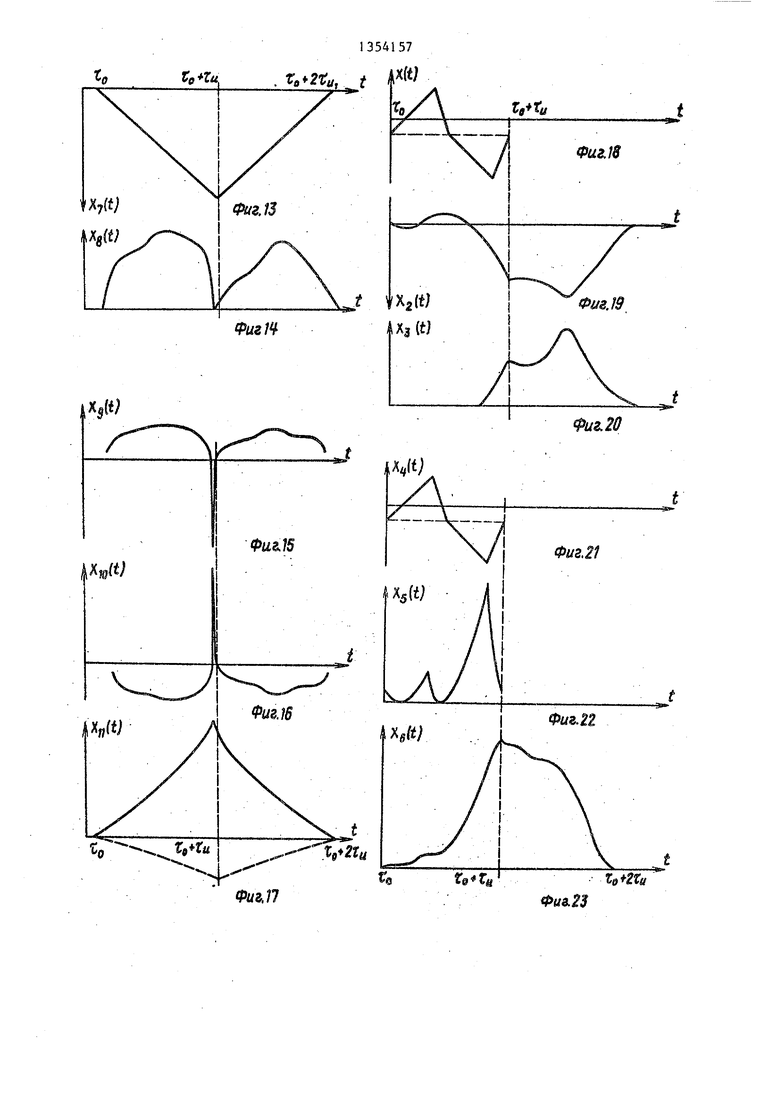
x(t) -К (t) - ). сигналов x(t) - x(t), когда реали- зация x(t) имеет вид, приведенный на
В сумматоре 11 сигнал x(t) суммиру- фиг.7, изображены на фиг.13-17 сплои- ется с сигналом x(t):„УМИ линиями.
x,(t) x(t),(t)-X3(t) . 5 Процесс формирования сигнала x,,(t)
аналогичен рассмотренному вьше и в
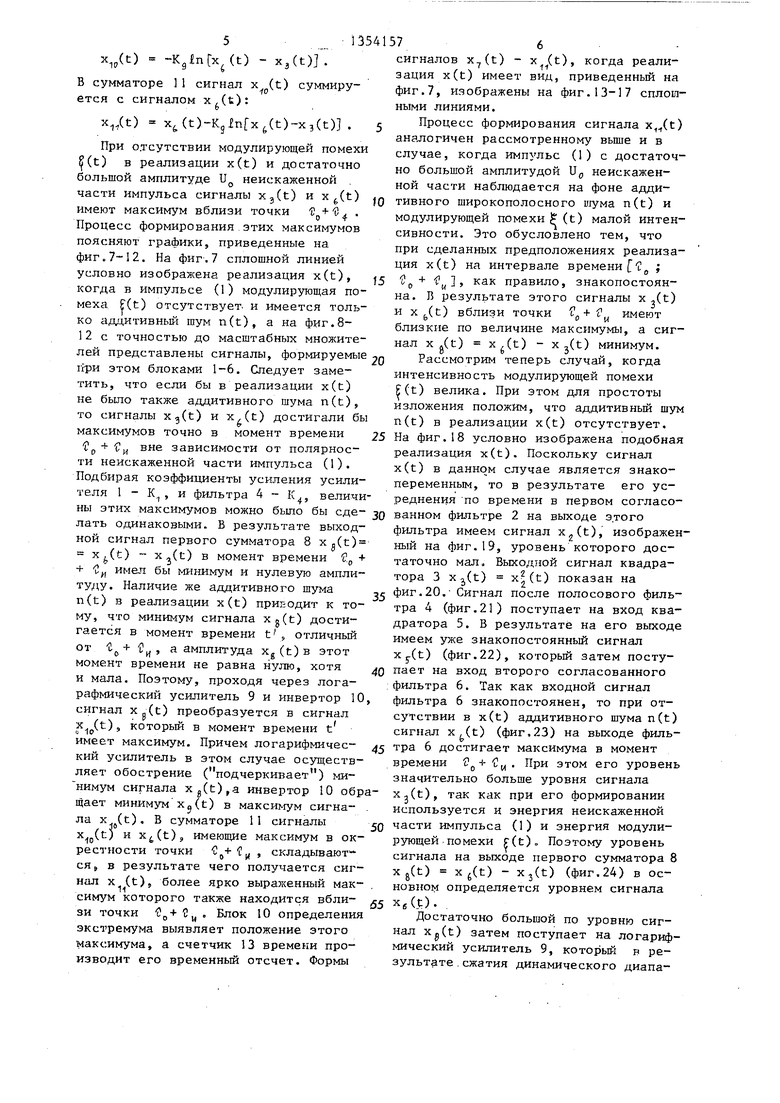
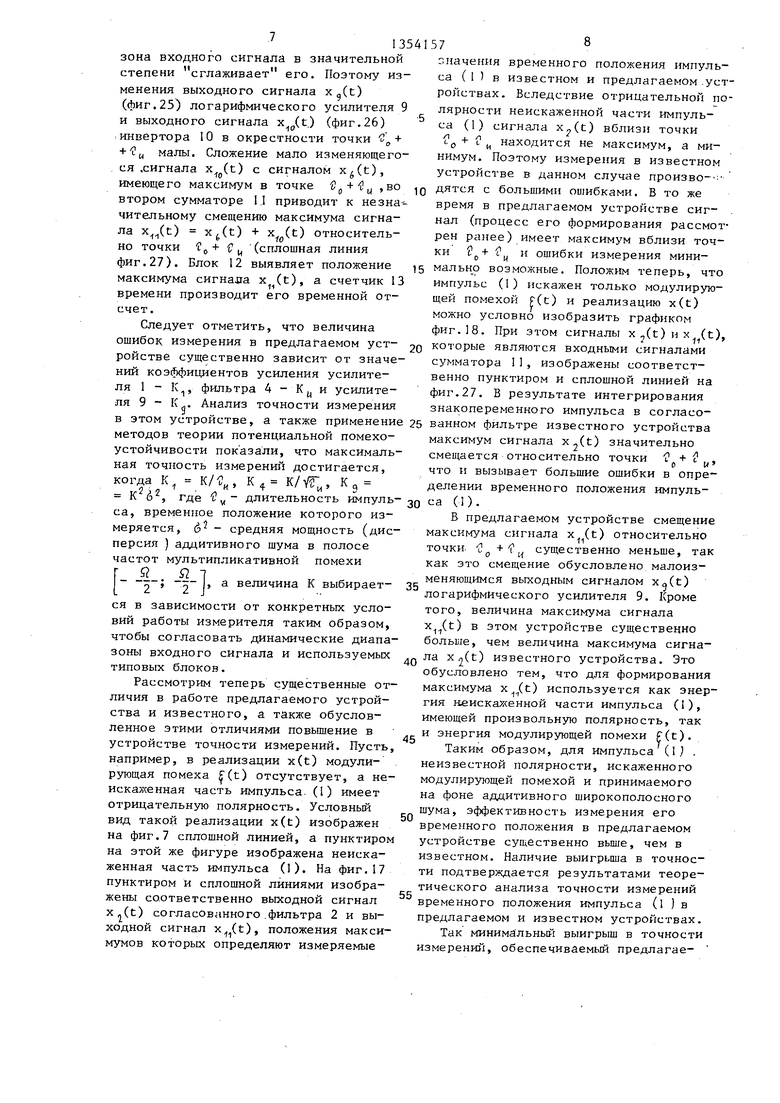
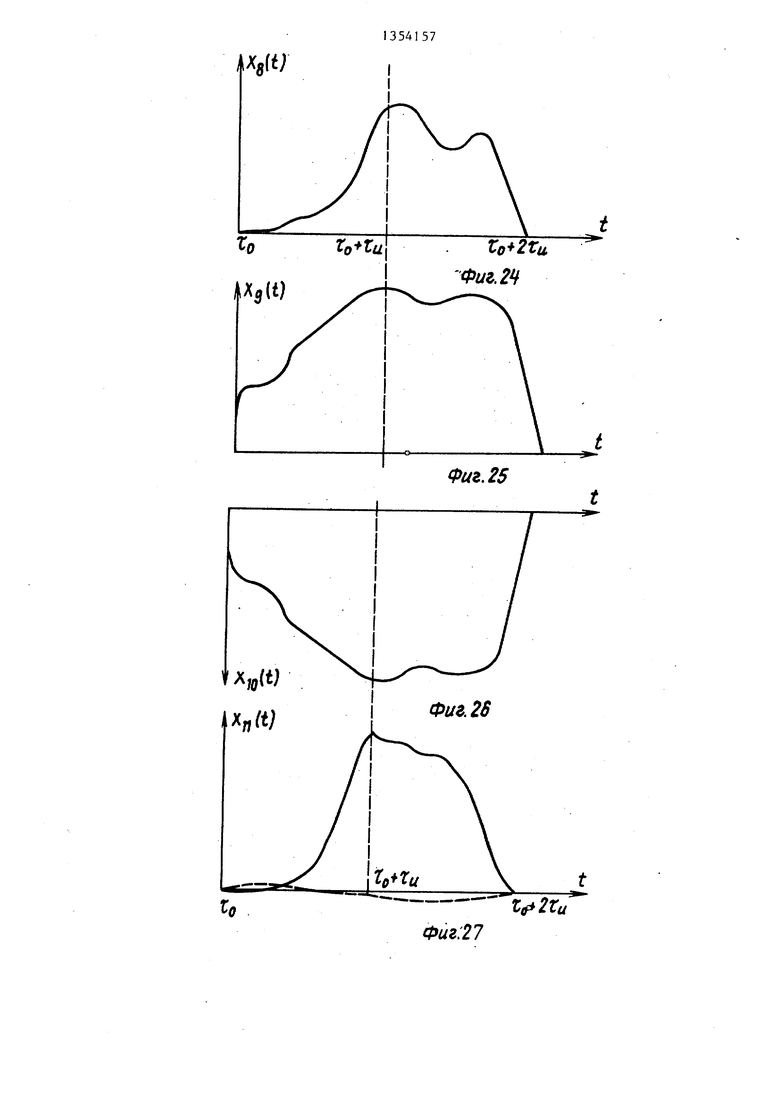
При отсутствии модулирующей помехи случае, когда импульс (1) с достаточ- f(t) в реализации x(t) и достаточно „Q большой амплитудой U неискажен- большой амплитуде U неискаженной части наблюдается на фоне адди- части импульса сигналы ) и ) ,Q тивного широкополосного uiyMa п(с) и имеют максимум вблизи точки . модулирующей помехи Mt) малой интен- Процесс формирования этих максимумов сивности. Это обусловлено тем, что поясняют графики, приведенные на „р сделанных предположениях реализа- фиг.7-12. На фиг.7 сплошной линией ция x(t) на интервале времени Гт„ ; условно изображена реализация x(t), ,5 (}„+ f, как правило, знакопостоян- когда в импульсе (1) модулирующая по- „а. В результате этого сигналы х ,(t) меха f(t) отсутствует, и имеется толь- и х ,(с) вблизи точки , ,, имеют ко аддитивный шум n(t), а на фиг.8- близкие по величине максимумы, а сиг- 12 с точностью до масштабных множите- „ал х .(t) x(t) - ) минимум, лей представлены сигналы, формируемые 2о Рассмотрим теперь случай, когда тфи этом блоками 1-6. Следует заме- интенсивность модулирующей помехи тить, что если бы в реализации x(t) c(t) велика. При этом для простоты не было также аддитивного шума n(t), изложения положим, что аддитивньш шум то сигналы XgCt) и x(t) достигали бы n(t) в реализации x(t) отсутствует, максимумов точно в момент времени 25 На фиг.18 условно изображена подобная Гр+ С вне зависимости от полярное- реализация x(t). Поскольку сигнал ти неискаженной части импульса (1). x(t) в данном случае является знако- Подбирая коэффициенты усиления усили- переменным, то в результате его ус- теля 1 - К, и фильтра 4 К, величи- реднения по времени в первом согласо- ны этих максимумов можно было бы еде- зо ванном фильтре 2 на выходе этого лать одинаковыми. В результате выход- фильтра имеем сигнал ), изображенной сигнал первого сумматора 8 Xg(t) ный на фиг.19, уровень которого дос- x(t) - ) в момент времени Ер + таточно мал. Выходной сигнал квадра- + Cj, имел бы минимум и нулевую ампли- тора 3 Xj(t) x|(t) показан на туду. Наличие же аддитивного шума фиг.20.- Сигнал после полосового филь- n(t) в реализации x(t) приводит к то- тра 4 (фиг.21) поступает на вход ква- му, что минимум сигнала xg(t) дости- дратора 5. В результате на его выходе гается в момент времени t , отличный имеем уже знакопостоянный сигнал от 1, а амплитуда Xg(t)B этот ) (фиг.22), который затем посту- момент времени не равна нулю, хотя Q пает на вход второго согласованного и мала. Поэтому, проходя через лога- фильтра 6. Так как входной сигнал рафмический усилитель 9 и инвертор 10, фильтра 6 знакопостоянен, то при от- сигнал Xg(t) преобразуется в сигнал сутствии в x(t) аддитивного шума n(t) (t;), который в момент времени t сигнал х (t) (фиг.23) на выходе филь- имеет максимум. Причем логарифмнчес- 5 тра 6 достигает максимума в момент кий усилитель в этом случае осуществ- времени Р + L . При этом его уровень ляет обострение (подчеркивает) ми- значительно больше уровня сигнала нимум сигнала Xg(t),a инвертор 10 обра- Xj(t), так как при его формировании щает минимум X5(t) в максимум сигна- . используется и энергия неискаженной ла X (t), В сумматоре 11 сигналы Q части импульса (1) и энергия модули- (t:j и x(t), имеющие максимум в ок- рующей-помехи r(t). Поэтому уровень рестности точки , складывают- сигнала на выходе первого сумматора 8 ся, Б результате чего получается сиг- х g(t) х(t) - Xj(t) (фиг.24) в ос- нал x(t), более ярко выраженный мак- . новном определяется уровнем сигнала симум которого также находится вбли- Xg(t:).
зи точки Оо+ Су . Блок 10 определения Достаточно большой по уровню сиг- экстремума выявляет положение этого нал Xj(t) затем поступает на логариф- максимума, а счетчик 13 времени про- мический усилитель 9, который в ре- изводит его временный отсчет. Формы зультате.сжатия динамического диапа I354I57
зона входного сигнала в значительной значения временного положения импуль- степени сглаживает его. Поэтоку из- са (1 ) в известном и предлагаемом.уст- менения выходного сигнала Xg(t) ройствах. Вследствие отрицательной по- (фиг.25) логарифмического усилителя 9 лярности неискаженной части импуль- и выходного сигнала х,(с.) (фиг.26) са (1) сигнала x,,,(t) вблизи точки : инвертора 10 в окрестности точки 2 + находится не максимум, а ми- + t)i малы. Сложение мало изменяющего- нимум. Поэтому измерения в известном ся .сигнала x(t) с сигналом x(t), устройстве в данном случае произво--: имеющего максимум в точке 1) + 1 , во ,Q дятся с большими ошибками. В то же втором сумматоре 1.1 приводит к незна- время в предлагаемом устройстве сиг- чительному смещению максимума сигна- нал (процесс его формирования рассмот- ла ) x(t) + x(t) относитель- рен ранее) имеет максимум вблизи точно точки Го и (сплошная линия ки 1)+ f н ошибки измерения мини- фиг.27). Блок 12 выявляет положение 5 мальнр возможные. Положим теперь, что максимума сигнала x(t), а счетчик 13 импульс (1) искажен только модулирую- времени производит его временной от- щей помехой р(с) и реализацию x(t) .можно условно изобразить графиком
Следует отметить, что величина фиг.18. При этом сигналы х(t) нх (t), ошибок измерения в предлагаемом уст- 20 которые являются входными сигналами ройстве существенно зависит от значе- сумматора I1, изображены соответст- ний коэффициентов усиления усилите- венно пунктиром и сплошной линией на ля 1 - К, фильтра 4 - К( и усилите- фиг.27. В результате интегрирования ля 9 - К . Анализ точности измерения знакопеременного импульса в согласо- в этом устройстве, а также применение 25 ванном фильтре известного устройства методов теории потенциальной помехо- максимум сигнала х ,(t) значительно устойчивости показали, что максималь- смещается относительно точки t + t , ная точность измерений достигается, что и вызывает большие ошибки в опре- когда К , К K/V, 9 делении временного положения импуль- К 6, где , длительность импуль- о са (I).
са, временное положение которого из- Б предлагаемом устройстве смещение меряется, 6 - средняя мощность (дис- максимума сигнала x.|(t) относительно Персия ) аддитивного шума в полосе точки и существенно меньше, так частот мультипликативной помехи как это смещение обусловлено малоиз,(t)
логарифмического усилителя 9. Кроме ся в зависимости от конкретных уело- того, величина максимума сигнала ВИЙ работы измерителя таким образом, i/ -) этом устройстве существенно чтобы согласовать динамические диапа- больБ1е, чем величина максимума сигна- зоны входного сигнала и используемых Q ла X2(t) известного устройства. Это типовых блоков.обусловлено тем, что для формирования
Рассмотрим теперь существенные от- максимума x(t) используется как энер- личия в работе предлагаемого устрой- гия неискаженной части импульса (I), ства и известного, а также обуслов- имеющей произвольную полярность, так ленное этими отличиями повьшение в с энергия модулирующей помехи f(t). устройстве точности измерений. Пусть, Таким образом, для импульса (I) . например, в реализации x(t) модули- неизвестной полярности, искаженного рующая помеха (t) отсутствует, а не- модулирующей помехой и принимаемого искаженная часть импульса.(1) имеет на фоне аддитивного широкополосного отрицательную полярность. Условный шума, эффективность измерения его вид такой реализации x(t) изображен временного положения в предлагаемом на фиг.7 сплошной линией, а пунктиром устройстве существенно выше, чем в на этой же фигуре изображена неиска- известном. Наличие выигрьоиа в точнос- женная часть импульса (1). На фиг.17 ти подтверждается результатами теоре- пунктиром и сплошной линиями изобра- тического анализа точности измерений жены соответственно выходной сигнал временного положения импульса (l ) в х„(с) согласованного.фильтра 2 и вы- предлагаемом и известном устройствах, ходной сигнал x(t), положения макси- Так минима льный выигрыш в точности мумов которых определяют измеряемые измерений, обеспечиваемый предлагае-ICi.lV- l fJlJ(IlJL7XrtlI 4J.fIl U EJlj;j4A - XI...fЛJCXdlA 1 14IL 1.Ц t: J J JT J JDO i J JCIJ.
Г 5 Л 1тл меняющимся выходным сигналом Xq(
- -о п а величинаК выбирает-35 л п ,
(. 2 2 J ..логарифмического усилителя 9. КЕ
Vn
V
4{2Г1 + (1 -f q) q(f - i) + (i + q)-fjT
где V - минимальный средний квадрат ошибок измерений в устройстве-прототипе, V - средний квадрат ошибок изме- 10 вход усилителя соединен с выходом ключа, первый вход которого соединен с входной шиной устройства, а второй вход подключен к выходу счетчика времени, выход усилителя подключен к вхо- 15 ду первого согласованного фильтра, блока определения экстремума подключен к счетному входу счетчика
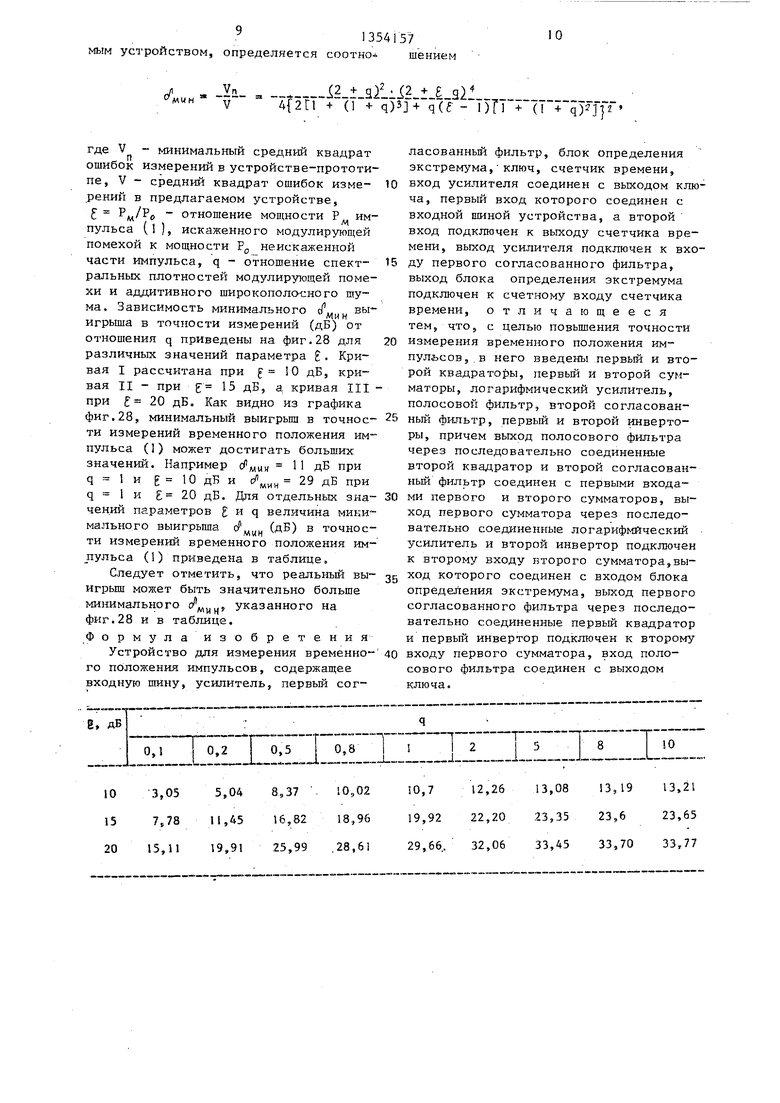
рений в предлагаемом устройстве, 5 Р„/РО - отношение мощности Р импульса (), искаженного модулирующей помехой к мощности Р неискаженной части импульса, q - отношение спектральных плотностей модулируюЕцей помехи и аддитивного широкополо :ного шума. Зависимость минимального с/ ,, , выМи гт
игрьша в точности измерений (дБ) от отношения q приведены на фиг.28 для различных значений параметра . Кривая I рассчитана при f 10 дБ, кривая II - при g; 15 дБ, а. кривая III при f 20 дБ« Как видно из графика фиг.28, минимальный выигрьпи в точности измерений временного положения им- пульса (1) может достигать больших значений. Например с „мн 11 дБ при q 1 и g 10 дБ и сУ„. 29 дБ при q 1 и 20 дБ. Для отдельных значений параметров и q величина мики мального выигрьша с (дБ) в точности измерений временного положения им- пульса (1) приведена в таблице.
Следует отметить, что реальный вы- игрьш может быть значительно больше
времени,
отличающееся
минимального f указанного на
фиг.28 и в таблице.
Ф о р м у л а и 3 о б р е т е н и я
Устройство для измерения временного положения импульсов, содержащее входную шину, усилитель, первый согтем, что, с целью повышения точности
20 измерения временного положения импульсов,, в него введены первый и второй квадраторы, первый и второй сумматоры, логарифмический усилитель, полосовой фильтр, второй согласован25 ный фильтр, первый и второй инверторы, причем выход полосового фильтра через последовательно соединенные второй квадратор и второй согласованный фильтр соединен с первыми входа30 ми первого и второго сумматоров, выход первого сумматора через последовательно соединенные логарифмический усилитель и второй инвертор подключен к второму входу второго сумматора,вы3g ход которого соединен с входом блока определения экстремума, выход первого согласованного фильтра через последовательно соединенные первьй квадратор и первый инвертор подключен к второму 40 входу первого сумматора, вход полосового фильтра соединен с выходом ключа.
8, дБ
10 15 20
ласованньй фильтр, блок определения экстремума, ключ, счетчик времени.
времени,
отличающееся
тем, что, с целью повышения точности
0 измерения временного положения импульсов,, в него введены первый и второй квадраторы, первый и второй сумматоры, логарифмический усилитель, полосовой фильтр, второй согласован25 ный фильтр, первый и второй инверторы, причем выход полосового фильтра через последовательно соединенные второй квадратор и второй согласованный фильтр соединен с первыми входа30 ми первого и второго сумматоров, выход первого сумматора через последовательно соединенные логарифмический усилитель и второй инвертор подключен к второму входу второго сумматора,вы3g ход которого соединен с входом блока определения экстремума, выход первого согласованного фильтра через последовательно соединенные первьй квадратор и первый инвертор подключен к второму 40 входу первого сумматора, вход полосового фильтра соединен с выходом ключа.
Фиг 5
Фиг. 9
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения временного положения импульсов | 1984 |
|
SU1357911A1 |
| Измеритель длительности импульсов | 1985 |
|
SU1399695A1 |
| Устройство для измерения временного положения импульсных радиосигналов | 1986 |
|
SU1394201A1 |
| Устройство для измерения длительности импульсных сигналов | 1984 |
|
SU1330604A1 |
| Устройство для измерения длительности импульса | 1989 |
|
SU1746357A1 |
| Устройство для измерения длительности импульсов | 1984 |
|
SU1251016A1 |
| Устройство для измерения длительности импульса | 1989 |
|
SU1684732A1 |
| Устройство для измерения длительности импульсных сигналов | 1988 |
|
SU1599838A1 |
| Адаптивное устройство приема оптических сигналов | 1991 |
|
SU1807573A1 |
| Режекторный фильтр | 1978 |
|
SU803104A1 |
f, Фиг,6
А/
чХчЛиЛЛ
Фиг.Ю
/%.y AAxvi
fo
t,t« Фиг. 12
Го Цtflt ftf, t
1354
t
1354157 X(t)
Фиг.Л
Фив.23
Фиг:27
ю
-I
Редактор Е.Папп
Составитель И.Мазуров Техред л. Сердюкова .
Заказ 5692/42 Тираж 371(Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.28
Корректор В.Гирняк
| Поиск, обнаружение и измерение параметров сигналов в радионавигационных системах | |||
| /Под ред | |||
| Ю.Н.Казари- нова | |||
| - М.: Советское радио, 1975, с | |||
| Приспособление для градации давления в воздухопроводе воздушных тормозов | 1921 |
|
SU193A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
