В одноя 3 клемма
СО со
UU
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения временного положения импульсов | 1986 |
|
SU1354157A1 |
| Устройство для измерения временного положения импульсов | 1984 |
|
SU1357911A1 |
| Измеритель длительности импульсов | 1985 |
|
SU1399695A1 |
| Устройство для измерения длительности импульсных сигналов | 1984 |
|
SU1330604A1 |
| Устройство для измерения длительности импульсов | 1984 |
|
SU1251016A1 |
| ОБНАРУЖИТЕЛЬ МОНОИМПУЛЬСНОГО РАДИОСИГНАЛА | 1992 |
|
RU2046370C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОЦЕНКИ ЧАСТОТЫ РАДИОИМПУЛЬСОВ | 2004 |
|
RU2267226C1 |
| Устройство контроля качества связи с амплитудной и частотной манипуляцией | 1981 |
|
SU1035813A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2549207C2 |
| Устройство для измерения длительности импульса | 1989 |
|
SU1746357A1 |
Изобретение, относится к радиотехнике и позволяет повысить точность измерения временного положения радиоимпульса неизвестной амплитуды при воздействии аддитивного широкополосного шума и модулирующих помех. Устройство содержит согласованный фильтр 1 радиосигнала, квадратичный детектор 2 огибающей, указатель 7 экстремума, счетчик 8 времени. Для достижения цели в устройство введены полосовой фильтр 3, квадратичный детектор 4 огибающей, согласованный фильтр 5 для огибающей радиосигнала, сумматор 6 и образованы новые функциональные связи. 7 ил.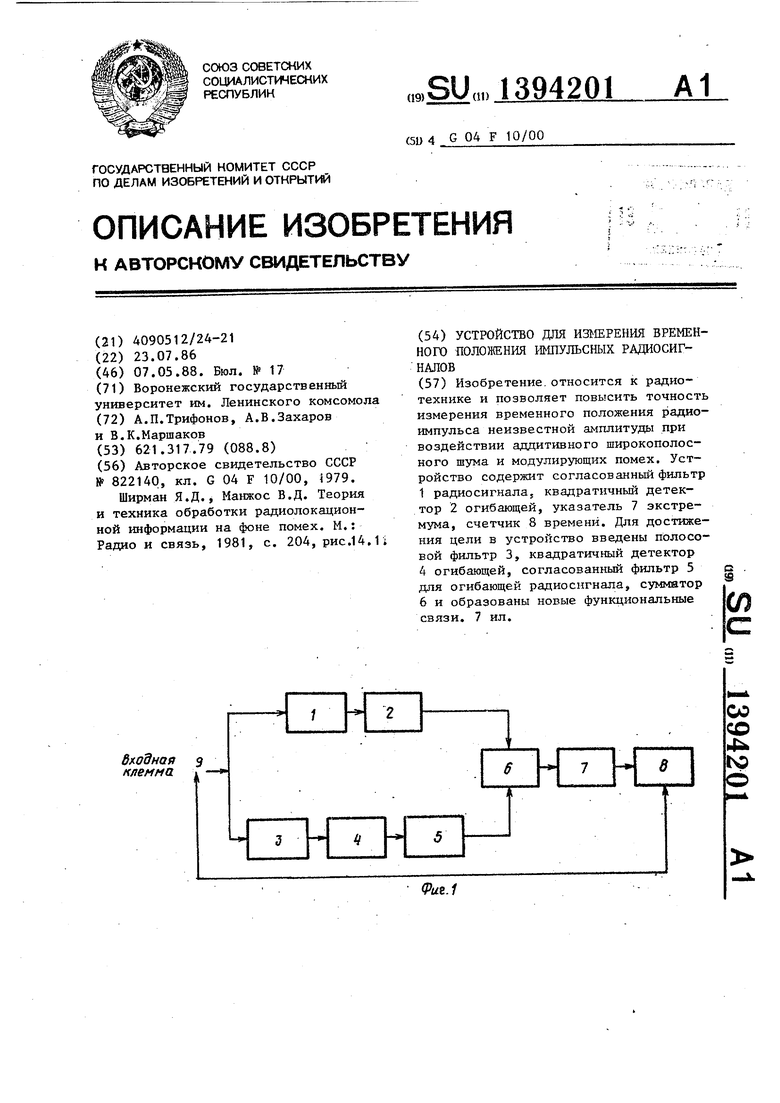
(Рие.1
Изобрете ше относится к радиотехнике и может быть использовано в радиотехнических устройствах измерения временных положений радио11мпульсов, входящих в состав радионавигационной аппаратуры.
Целью изобретения является повышение точности измерения временного положения радиоимпульса неизвестной .амплитуды при воздействии адаитивно- го широкополосного шума и модулирующих помех.
На фиг. 1 представлена структурная схема устройства для измерения вре- менного положения импульснь х радиосигналов; на фиг. 2-7 - временные диаграммы, показывающие виды преобразований полезного сигнала и модулирующей помехи при прохождении через составные части устройства.
Устройство для измерения временного положения импульсных радиосигна- .лов (фиг.1) содержит согласованный фильтр 1 радиосигнала, первый квад- ратичный детектор 2 огибающей, полосовой фильтр 3, второй квадратичный детектор 4 огибающей, согласованный фильтр 5 ДД1Я огибающей радиосигнала, сумматор 6, указатель 7 экстремума, счетчик 8 времени, входную клемму 9, причем сумматор 6, указатель 7 и счетчик 8 образуют блок фиксации момента времени, соответствующего максимуму выходного сигнала детектора 2, фильт 1 и квадратичный детектор 2 образуют первый канал обработки, а фильтр 3, квадратичный детектор 4 и фильтр 9 образуют второй канал обработки.
Входная клемма 9 устройства соединена с входами согласованного фильтра 1 и полосового фильтра 3. Выход фильтра 1 подключен к входу квадратичного детектора 2, выход которого соединен с одним из входов сумматора 6. Другой вход сумматора 6 подключен к выходу согласованного фильтра 5, вход которого соединен через квадратичный детектор 4 с выходом полосового фильтра 3.Выход сумматора 6 через указатель 7 соединен со входом счетчика 8 времени.
Устройство работает следующим образом.
При замыкании входной клеммы 9 на вход устройства поступает аддитивная смесь x(t)S(t, Co )+n(t) радиоимпульса S() и широкополосного шума n(t) и одновременно включается счет
чик 8. Радиоимпульс ), временное положение Г, которого необходимо измерить, искажен модулирующей помехой так, что его можно описать формулой
д
j Q
5
0
5
s(t,r)
Uo + Ct) cos cOot+cf, 0
О,
9
,.
(1)
и qi обозначаютЗдесь через Ц ся амплитуда, центральная частота и начальная фаза неискаженной части импульса, бц - длительность импульса, (t) характеризует модулирующую помеху, обладающую спектром мощности, сосредоточенным в диапазоне частот -52/2 S2/2J. Мультипликативные флуктуации предполагаются быстрыми так что /21Т 1. Через входную клемму 9 устройства аддитивная смесь x(t) поступает на первый и второй каналы обработки. Выходные сигналы x(t) и xr(t) этих каналов обработки далее суммируются в сумматоре 6 и подаются на указатель 7 экстремума. Указатель экстремума 7 выявляет положение наибольшего максимума сигнала Xg(t) x,(t)+Xj(t) , а счетчик 8 времени производит его временной отсчет и размыкает входную клемму 9, после чего устройство готово к следующему циклу измерений. В первом канале обработки x(t) подается на вход фильтра 1 , согласованного с радиоимпульсом
s,(t)
, OttficTu
0.
,.
(2)
который представляет собой часть радиоимпульса (1), неискаженную модулирующей помехой (t). Сигнал на
выходе фильтра 1 при этом имеет вид
x,(t) x()cos(G3, ir-Cf)d,
t Выход фильтра 1 подключен к входу
квадратичного детектора 2 огибающей, в результате чего сигнал на выходе детектора 2 может быть записан как .1
Xj(t) x()cos4 Z d2T + L ; г
i
xC OsinQ,
(3)
Аналогичный сигнал формируетсй и в известном устройстве. В отсутствие аддитивного шума n(t) и модулирующей помехи (t) сигнал x,.j (t) (3) имеет максимум в момент временило +
+ Г(, . Наличие аддитивного широкополосного шума n(t) приводит к смещению этого максимума относительно точки и V.aK следует из теории потенциальной помехоустойчивости5 смещение максимума x(t) относительно точки Т из-за наличия только аддитивного широкополосного шума n(t) будет минимально возможным. Это обус ловлено максимальным подавлением аддитивного широкополосного шума согласованным фильтром 1 радиосигнала за счет временного усреднения. Поэтому при отсутствии модулирующей помехи (t) или при достаточно малом ее уровне измерение временного положения импульса (1) можно осуществлять на основе определения положения максимума
сигнала x(t). Такой алгоритм измере- 2о Так, например, если реализация x(t)
ния используется в известном устройстве что обеспечивает минимально воз ножные ошибки измерения при отсутствии модулирующей помехи (t). Однако наличие модулирующей помехи (t) в (1) может смещать положение максимума сигнала x(t) относительно точки tT + Сц на достаточную большую величину, что приводит к значительньм ошибкам измерения. Это обстоятельство иллюстрируется графиками, представленными на фиг.2-4. На фиг.2 условно изображена реализация x(t) при отсутствии аддитивного шума n(t), т.е импульс (1), искаженный модулирующей помехой (t). На фиг. 3 и 4 изображены соответственно формы сигналов x,(t) и x(t), которые формируют согласованный фильтр радиосигнала 1 и первый квадратичный детектор огибающей 2. Как следует из фиг. 4, положение максимума сигнала x(t) находится достаточно далеко от точки б + с ц.
Сигнал, положение максимума которого не изменяется из-за наличия мо- дулирующей помехи (t), формируется в устройстве с помощью второго канала обработки,В этом канале реализация x(t) поступает на вход полосового фильтра 3 с полосой пропускания MQ - - й/2 ,Сао + 52 /2 , имеющего коэффициент передачи в этой полосе Kj,
В результате на выходе фильтра 3 имеем сигнал
25
30
35
40
имеет вид, изображенный на фиг. 2, то сигнал Xij(t) на выходе второго квадратичного детектора 4 с точность до масштабного множителя можно представить графиком, изображенным на фиг.5 о Знакопостоянный сигнал ) с выхода детектора 4 поступает на вход фильтра 5, согласованного с оги бающей радиоимпульса (2), неискаженного модулирующей помехой (t). На выходе фильтра 5 при этом формируетСЯ сигнал I.-:t -V t- ц
x(t) I x(t)dt,
ЯВЛ5ШЩИЙСЯ выходным сигналом второго канала обработки Поскольку при отсутствии аддитивного шума n(t) знакопостоянный сигнал x(t) отличен от нуля только в течение времени |сГо 5 J o выходной сигнал x(t) фильтра 5 вне зависимости от вида реализации модулирующей помехи (t) всегда имеет максимум в момент времени о., +
U
На фиг. б изображена
45
50
форма сигнала ) для случая, когда реализация x(t) имеет вид, изображенный на фиг.2. Наличие аддитивного широкополосного шума n(t) в реа лизации x(t) приводит к смещению максимума сигнала ) относительно точки TO . Причем это смещение может быть большим, чем смещение максимума выходного сигнала первого канала обработки X (t) из-за появления на входе согласованного фильтра 5 перекрестных помех типа произведения сигнал на шум при детектировании сигнала XjCt). Поэтому измерение временного положения импульса (1) можно бы-
X5(t)K,j x(t-)
sin(u ;:/2)
-00
no
X -qi)d r, (4)
который затем подается на вход второго К задратич1юго детектора огибающей 4, На вь5ходе этого детектора формируется сигнал Xjj(t), пропорциональньш квадрату огибающей сигнала (4):
f xCt-r)
sin(C2 C/2)
ТГГ
coscOg Td t:
1
j x(t- )
sin(ci6/2)
sinO cTd
При отсутствии в 1}ринимаемой реализации x(t) аддитивного шума n(t) сиг- нуля только в + . Причем
нал x(t)
отличен от
течение времени ,
в течение этого времени сигнал x(t) является знакопостоянным при любой реализации модулир тощей помехи (t),
Так, например, если реализация x(t)
5
0
5
0
имеет вид, изображенный на фиг. 2, то сигнал Xij(t) на выходе второго квадратичного детектора 4 с точностью до масштабного множителя можно представить графиком, изображенным на фиг.5 о Знакопостоянный сигнал ) с выхода детектора 4 поступает на вход фильтра 5, согласованного с огибающей радиоимпульса (2), неискаженного модулирующей помехой (t). На выходе фильтра 5 при этом формируетСЯ сигнал I.-:t -V t- ц
x(t) I x(t)dt,
ЯВЛ5ШЩИЙСЯ выходным сигналом второго канала обработки Поскольку при отсутствии аддитивного шума n(t) знакопостоянный сигнал x(t) отличен от нуля только в течение времени |сГо 5 J o выходной сигнал x(t) фильтра 5 вне зависимости от вида реализации модулирующей помехи (t) всегда имеет максимум в момент времени о., +
U
На фиг. б изображена
5
0
5
форма сигнала ) для случая, когда реализация x(t) имеет вид, изображенный на фиг.2. Наличие аддитивного широкополосного шума n(t) в реализации x(t) приводит к смещению максимума сигнала ) относительно точки TO . Причем это смещение может быть большим, чем смещение максимума выходного сигнала первого канала обработки X (t) из-за появления на входе согласованного фильтра 5 перекрестных помех типа произведения сигнал на шум при детектировании сигнала XjCt). Поэтому измерение временного положения импульса (1) можно бы-
ло бы производить нз основе определения положения максимума сигнала ), если бы аддитивный шум n(t) на входе отсутствовал или имел бы достаточно малый уровень.
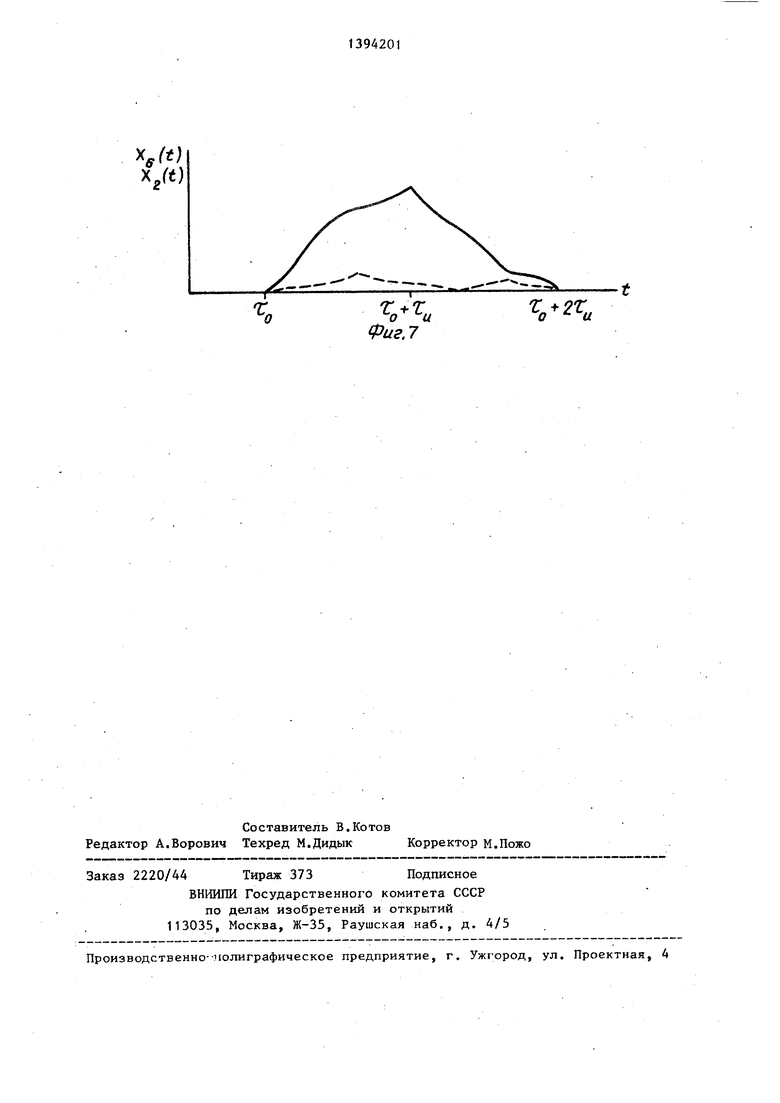
При произвольном соотношении уровней аддитивного широкополосного шума n(t) и модулирующей помехи (t) измерение временного положения радио- импульса (1) в устройстве производится по положению максимума суммы Xg(t) х () входных сигналов первого и второго каналов обработки. Форма суммарного сигнала x(t) и соответственно точность измерения в устройстве существенно зависят от значения коэффициента К усиления полосового фильтра 3. Значение этого коэффициента усиления определяет относительный уровень сигналов x(t) и ) в суммарном сигнале Xg(t). Анализ точности измерений в устройстве, а также применение методов потенциальной помехоустойчивости показали, что макси- мальная точность измерений достигается, когда .q72. Здесь - длительность радиоимпульса(1), а q - отношение спектральных плотностей модулирующей помехи f(t) и аддитивного широкополосного шума n(t).
Формула изобретения
Устройство для измерения временного положения импульсных радиосигналов, содержащее последовательно соединенные входную клемму, согласованный фш1ьтр радиосигнала и первый квадратичный детектор огибающей, последовательно соединенные указатель экстремума и счетчик времени, второй вход которого соединен с входной клеммой, отличающееся тем, что, с целью повьш1ения точности измерения временного положения импульсных радиосигналов, в него дополнительно введены последовательно соединенные полосовой фильтр, второй квадратичный детектор огибающей, согласованный фильтр для огибающей радиосигнала и сумматор, второй вход которого подключен к выходу первого квадратичного детектора огибающей, выход сумматора соединен с входом указателя экстремума, вход полосового фильтра подключен к входной клемме.
о-гт
Фиг.:5
x,W
Фиг.
Фиг. 5 °
Фиг. 8
-2Г
(,М x/t)
Фиг.7
.гг„
| Устройство для определения временногопОлОжЕНия иМпульСОВ | 1979 |
|
SU822140A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Ширман H.fl.j Манжос В.Д | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| М.: Радио и связь, 1981, с | |||
| Ротационный фильтр-пресс для отжатия торфяной массы, подвергшейся коагулированию, и т.п. работ | 1924 |
|
SU204A1 |
