зическим и электрохимическим методам обработки и, в частности, касается механизмов регуляторов подачи электроэрозионных станков.
Цель изобретения - повышение точности перемещения при увеличенных передаточных отношениях вращательно- поступательной винтовой пары.
На фиг. 1 показан шариковый винтовой механизм с элементами регулятора подачи электроэрозионного станка; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел 1 на фиг. 1.
Корпус 1 с закрепленным на нем электродвигателем 2 являются элементами регулятора подачи электроэрозионного станка. Вал электродвигателя 2 связан упругой муфтой 3 с собственно шариковым винтовым механизмом, а именно с входящим в его состав стержнем А. На стержне 4 с помощью шпоночного соединения 5 размещены втулки 6- 8, прилежащие торцы которых обработаны так, что образуют винтовую дорожку, в которой размещены шарики 9 с сепаратором 10. Другой конец стержня 4 установлен в двух самоустанавливающихся подшипниках 11, между наружными обоймами которых зажата пластина 12, прикрепленная к корпусу 1, а между внутренними - шайба 13. На резьбовом конце стержня 4 установлена регулировочная гайка 14, создающая натяг шариков между образзтощими винтовой дорожки втулок 6-8 и цилиндрической поверхностью отверстия втулки 15, на которой закреплены другие элементы регулятора подачи: изолированный электрододержатель 16 и электрод-инструмент 17. Втулка 15 перемещается относительно корпуса 1 в шариковых направляющих 18 качения.
Наладка шарикового винтового меха- ,с группой шариков, помещенных между
JwoV
50
низма осуществляется следующим образом. На стержень 4 последовательно устанавливаются втулки 6-8, подшипники 11 с шайбой 13 и пластиной 12 и наживляют гайку 14. Разность толщин пластины 12 и шайбы 13 обеспечивает выбор осевого люфта подшипников 11, Затем всю сборку через нижнее отверстие корпуса 1 вдвигают в цилиндрическое отверстие втулки 15, предва- рительно установленной в шариковых направляющих 18 качения. По мере вхождения винтовых дорожек втулок 6-8
винтом и гайкой в винтовой дорожк и возвратном канале, соединяющем н чало и конец витков дорожки, отл чающийся тем, что, с целью повьштения точности перемещений при больших передаточных отношениях, в выполнен в виде стержня, на которо для размещения шариков изготовлено не менее двух ОДНОВИТКОЁЫК винтовы дорожек с возвратным каналом, а га ка выполнена в виде цилиндрической охватывающей винт втулки, и размещ на на шариках с натягом.
ми закладывают шарики 9 на сепараторе 10.
В некотором среднем положении стержня 4 с втулками 6-8 внутри втулки 15 затягивают гайку 14, создавая натяг шариков 9 за счет осевого смещения втулок 6-8. Затем конец стержня 4 с помощью пластины 12 крепится к корпусу 1.
Шариковый винтовой механизм работает следующим образом.
Вращение вала электродвигателя 2 через муфту 3 передается на стержень 4 механизма и через шпоночное соединение 5 на втулки 6-8. Шарики 9 катятся по винтовым дорожкам втулок 6- 8 и винтовой линии цилиндрической поверхности втулки 15. За один оборот стержня 4 втулка 15 перемещается в осевом направлении на величину шага винтовой дорожки. Шарики 9, сделав оборот по винтовой дорожке, входят . в возвратный канал дорожек и вновь возвращаютя в начало винтовой дорожки втулок 6-8.
Применение механизма для малогаба- ритных электроэрозионных станков позволяет повысить точность перемещения электродов и за счет этого - стабильность процесса обработки. Шаг подачи может быть выбран сколь угодно малым путем подбора профиля винтовых дорожек втулок 6-8. Это допускает использование механизма на прецизионных станках с особыми требованиями по точности перемещения.
40
Формула изобретения
-Шариковый винтовой механизм, содержащий шариковую винтовую пару с
JwoV
0
винтом и гайкой в винтовой дорожке и возвратном канале, соединяющем начало и конец витков дорожки, отличающийся тем, что, с целью повьштения точности перемещений при больших передаточных отношениях, винт выполнен в виде стержня, на котором для размещения шариков изготовлено не менее двух ОДНОВИТКОЁЫК винтовых дорожек с возвратным каналом, а гайка выполнена в виде цилиндрической, охватывающей винт втулки, и размещена на шариках с натягом.
.
uz.2
I
6 fO
(Риг. 5
7 9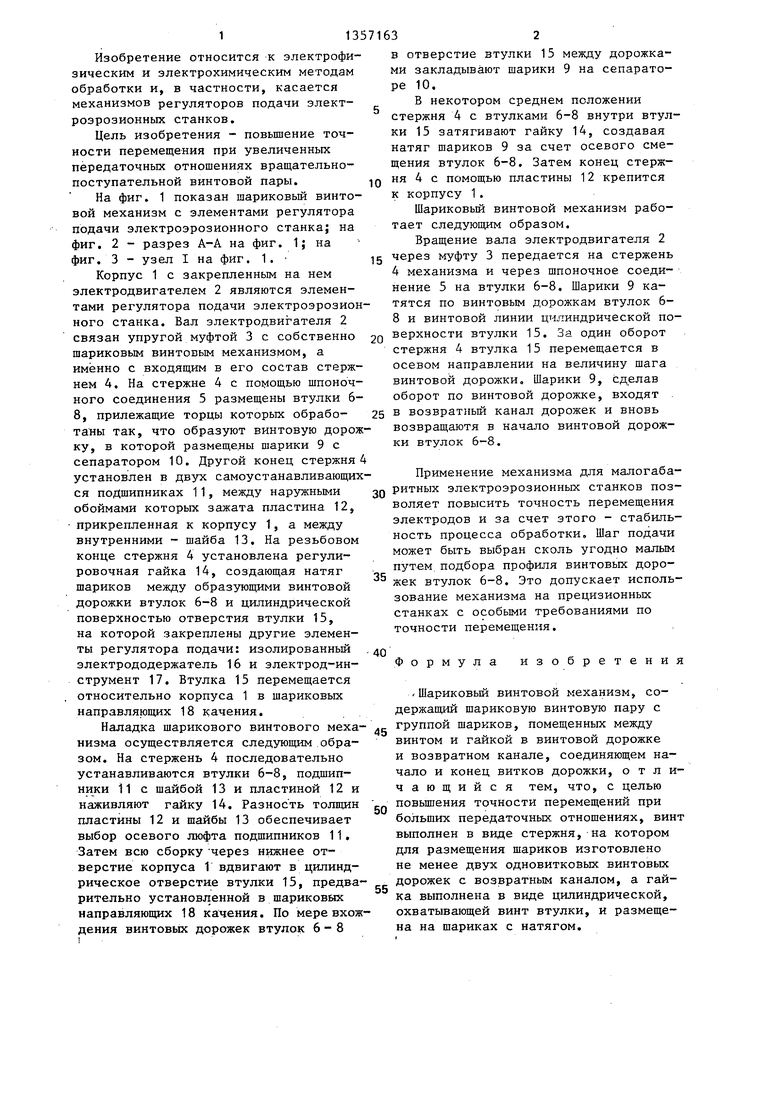
| название | год | авторы | номер документа |
|---|---|---|---|
| Кондуктор для обработки отверстий | 1984 |
|
SU1199478A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| ВИНТОВАЯ ШАРИКОВАЯ ПАРА | 1972 |
|
SU338717A1 |
| ВЕЛОСИПЕД ДВУХКОЛЕСНЫЙ | 2018 |
|
RU2696749C1 |
| Шариковая винтовая передача | 1986 |
|
SU1504439A1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| Привод шпинделя для вибрационного резания | 1986 |
|
SU1373488A1 |
| Шариковый механизм | 1986 |
|
SU1427124A1 |
| ШАРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2000 |
|
RU2184289C2 |
| Шариковый винтовой механизм с предварительным натягом | 1987 |
|
SU1414987A1 |

Изобретение относится к электрофизическим и электрохимическим методам обработки и, в частности, касается механизмов преобразования вращательного движения в поступательное в регуляторах подачи электроэрозионных прецизионных станков. Цель изобретения - повышение точности перемещения при больших передаточных отношениях кинематической пары винт - гайка. Вращение вала электродвигателя 2 передается на стержень 4 шарикового винтового механизма. Шарики 9 катятся по винтовым дорожкам между втулками 6, 7, 8 и втулкой 15. За один оборот стержня 4 втулка 15 перемещается в осевом направлении на величину шага винтовой дорожки. Шаг подачи может быть установлен сколь угодно малым за счет подбор профиля винтовых.дорожек. 3 ил. (Л CZ о: СП СП оо л
| АППАРАТ ДЛЯ МОКРОЙ ОЧИСТКИ ГАЗОВ | 2013 |
|
RU2548092C1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
