Изобретение относится к технике сепарирования сыпучих материалов и может быть использовано в горнорудной, химической промышленности и в сельском хозяйстве.
Цель изобретения - сокращение времени и повышение точности.
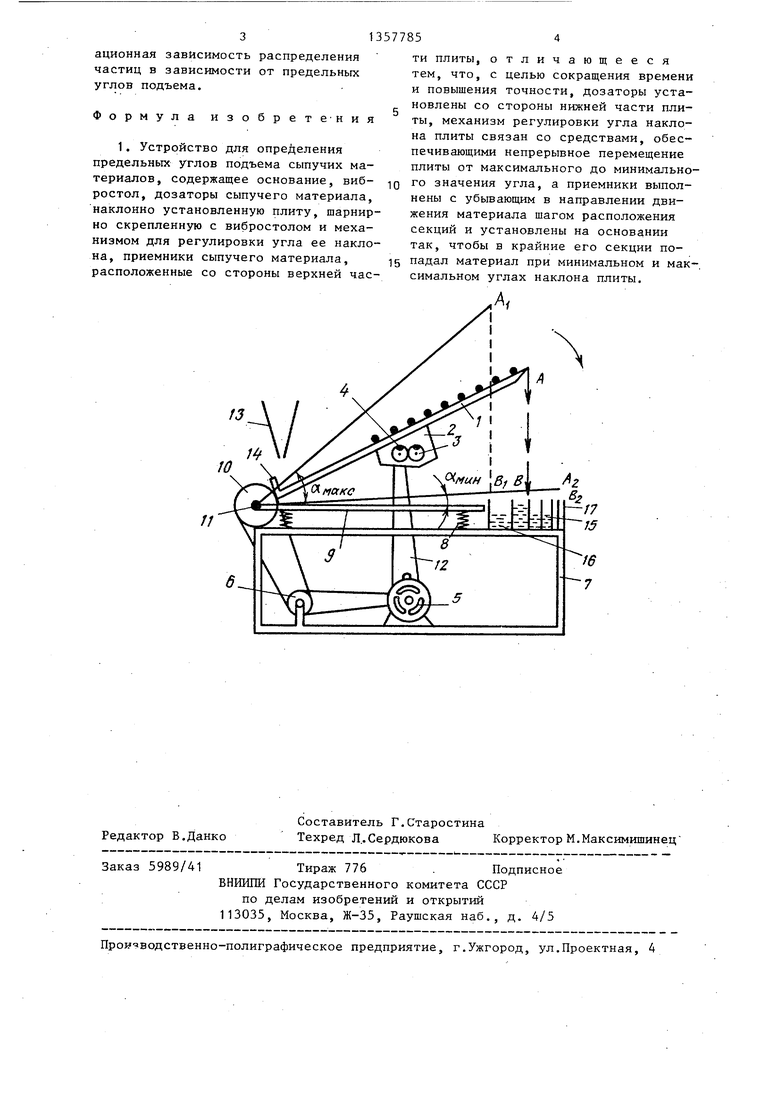
На чертеже представлена схема устройства.
Устройство для определения предельных углов подъема сыпучих материалов содержит плиту 1, вибровозбудитель 2, вал 3, дебалансный груз 4,
10
репляться на отдельной стойке-подвесе. В нижней части плиты 1 установлен ограничитель 14, который жестко скреплен с- плитой 1. Пакет 15 приемников расположен со стороны верхней части плиты 1 и установлен на основании 7. При этом приемники расположены таким образом, что при максимальном значении угла наклона плиты мсикс частицы сыпучего материала попадают в секцию 16, наиболее близко расположенную к шарниру 11. При минимальном значении угла наклона плиэлектродвигатель 5, промежуточную пе- 15 ты 1 oi „„ц частицы сыпучего материала редачу 6, основание 7, пружину 8, вибростол 9, механизм 10 для регулирования угла наклона плиты, шарнир 11, ременную передачу 12, дозатор 13 сыпучего материала, ограничитель 14
20
попадают в секцию 17.
Процесс разделения частиц в зависимости от предельных углов осуществ ляется следующим образом.
С помощью дозатора 13 частицы рас пределяются вдоль ограничителя 14 на поверхности плиты 1. При этом пли та 1 наклонена к горизонту на максимальный угол. Плита 1 приводится в
сыпучего материала, пакет 15 приемников, крайнюю секцию 16 пакета приемников, расположенную на минимальном расстоянии от оси вращения плиты, и крайнюю секцию 17 пакета приемников, расположенную на максимальном расстоянии от оси вращения плиты 1. Плита 1 выполняется в виде жесткой прямолинейной неперфорированной деки, которая покрывается фрикционным материалом. Данная плита 1 приводится в вибрационное движение посг редством вибровозбудителя 2, который жестко скреплен с плитой 1 и устанавливается в нижней ее части. Вибровозбудитель 2 представляет собой жесткий корпус, в котором установлены два вала 3 с закрепленными на них деба- лансн-ыми грузами 4. При этом валы 3 с грузами 4 приводятся в движение электродвигателем 5 посредством ременной передачи 12. Кроме того, вращательное движение от электродвигателя 5 передается также на промежуточную передачу 6. При этом электродвигатель 5 и промежуточная передача 6 жестко закреплены на неподвижном основании 7. На данном основании 7 с помощью пружин 8 упруго подвешен вибростол 9. На вибростоле установлен механизм 10 регулирования угла наклона , плиты 1 с помощью шарнира 11. При этом механизм 10 жестко соединен х плитой 1. Подача сыпучего материала
на плиту 1 осуществляется посредством 55 угла наклона минимальному, значению
дозатора
13, расположенного сверху
Ыд,ин После осуществления указанного разделения производится подсчет.количества частиц в каждом приемнике и на основании этого строится вариплиты 1. Возможны варианты установки дозатора 13. Он может закрепляться жестко на вибростоле 9 и жестко зак
репляться на отдельной стойке-подвесе. В нижней части плиты 1 установлен ограничитель 14, который жестко скреплен с- плитой 1. Пакет 15 приемников расположен со стороны верхней части плиты 1 и установлен на основании 7. При этом приемники расположены таким образом, что при максимальном значении угла наклона плиты мсикс частицы сыпучего материала попадают в секцию 16, наиболее близко расположенную к шарниру 11. При минимальном значении угла наклона пли5 ты 1 oi „„ц частицы сыпучего материала
0
0
попадают в секцию 17.
Процесс разделения частиц в зависимости от предельных углов осуществляется следующим образом.
С помощью дозатора 13 частицы распределяются вдоль ограничителя 14 на поверхности плиты 1. При этом плита 1 наклонена к горизонту на максимальный угол. Плита 1 приводится в
5 колебательное движение посредством вибровозбудителя 2 и электродвигателя 5. Частицы начинают совершать вибрационное перемещение к верхнему краю плиты 1. В зависимости от предельных углов подъема частицы имеют различную скорость вибрационного перемещения и приходят к верхнему краю в разЛич- ные моменты времени. В момент прихода наиболее быстрых частиц к краю плиты вращательное движение начинает передаваться посредством переда- - чи 6 на механизм 10 изменения угла наклона плиты 1. До этого механизм передачи 6 вращался вхолостую. Механизм 10 начинает плавно и непрерывно осуществлять изменение угла наклона плиты к горизонту. В результате этого по мере подхода частиц к верхнему краю плиты 1.они распределяют5 ся по различным приемникам, собранным в пакет 15. При этом частицы, имеющие равные скорости вибрацион- -ного перемещения, имеют одинаковый момент прихода к краю плиты и соответственно равные предельные углы подъема. Данные частицы оказываются в одном и том же приемнике. Вращение плиты 1 посредством механизма 10 осуществляется до момента равенства
5
0
0
угла наклона минимальному, значению
Ыд,ин После осуществления указанного разделения производится подсчет.количества частиц в каждом приемнике и на основании этого строится вари3
ационная зависимость распределения частиц в зависимости от предельных углов подъема.
Формула изобретб Ни
1. Устройство для определения предельных углов подъема сыпучих материалов, содержащее основание, вибростол, дозаторы сыпучего материала, наклонно установленную плиту, шарнир- но скрепленную с вибростолом и механизмом для регулировки угла ее наклона, приемники сыпучего материала, расположенные со стороны верхней части плиты, отличающееся тем, что, с целью сокращения времени и повышения точности, дозаторы установлены со стороны нижней части плина плиты связан со средствами, обеспечивающими непрерывное перемещение плиты от максимального до минимального значения угла, а приемники выполнены с убывающим в направлении движения материала щагом расположения секций и установлены на основании так, чтобы в крайние его секции попадал материал при минимальном и максимальном углах наклона плиты.
13
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный классификатор зернистых материалов по их предельному углу подъема | 1985 |
|
SU1296238A1 |
| Установка для определения предельного угла подъема сыпучего материала | 1985 |
|
SU1283607A1 |
| Вибрационный классификатор сыпучих материалов | 1985 |
|
SU1304923A1 |
| Вибросепаратор зернистых материалов | 1985 |
|
SU1344429A1 |
| ВИБРАЦИОННЫЙ СМЕСИТЕЛЬ ПЕРИОДИЧЕСКОГО ДЕЙСТВИЯ С ДОЗАТОРОМ ОБЪЕМНОГО ТИПА | 2006 |
|
RU2318585C2 |
| Вибрационный сепаратор | 1986 |
|
SU1417935A1 |
| Виброрешетная семяочистительная машина | 1990 |
|
SU1708439A1 |
| Вибрационный сепаратор сыпучих материалов | 1986 |
|
SU1319931A1 |
| Устройство для сепарации семян сельскохозяйственных растений | 1986 |
|
SU1315875A1 |
| Сепаратор сыпучих материалов | 1986 |
|
SU1323145A1 |
Изобретение относится к технике сепарирования сыпучих материалов. Цель изобретения - сокращение времени и повьшение точности. Устройство содержит основание, вибростол, укрепленную на нем наклонную плиту с механизмом непрерывного изменения угла наклона, дозаторы, размещенные над нижней частью плиты, а также приемники материала в виде набора секций, размещенные на основании под верхней частью плиты так, чтобы в их крайние секции материал мог попадать при ми- минимальном и максимальном углах наклона плиты. 1 з.п. ф-лы, 1 ил. SS & (Л со ел 00 ел
Редактор В.Данко
Составитель Г.Старостина
Техред Л..Сердюкова Корректор М.Максимишинец
Заказ 5989/41Тираж 776 . Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| СЕПАРАТОР ДЛЯ ОЧИСТКИ СЕМЯН ОТ ПРИМЕСЕЙ | 0 |
|
SU287451A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Установка для определения предельного угла подъема сыпучего материала | 1982 |
|
SU1019287A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
