Изобретение относится к сельскому хозяйству и может быть применено при поливе сельскохозяйственных культур широкозахватными Дождевальными машинами.
Цель изобретения - уменьшение резервных емкостей канала и непроизводительных сбросов воды.
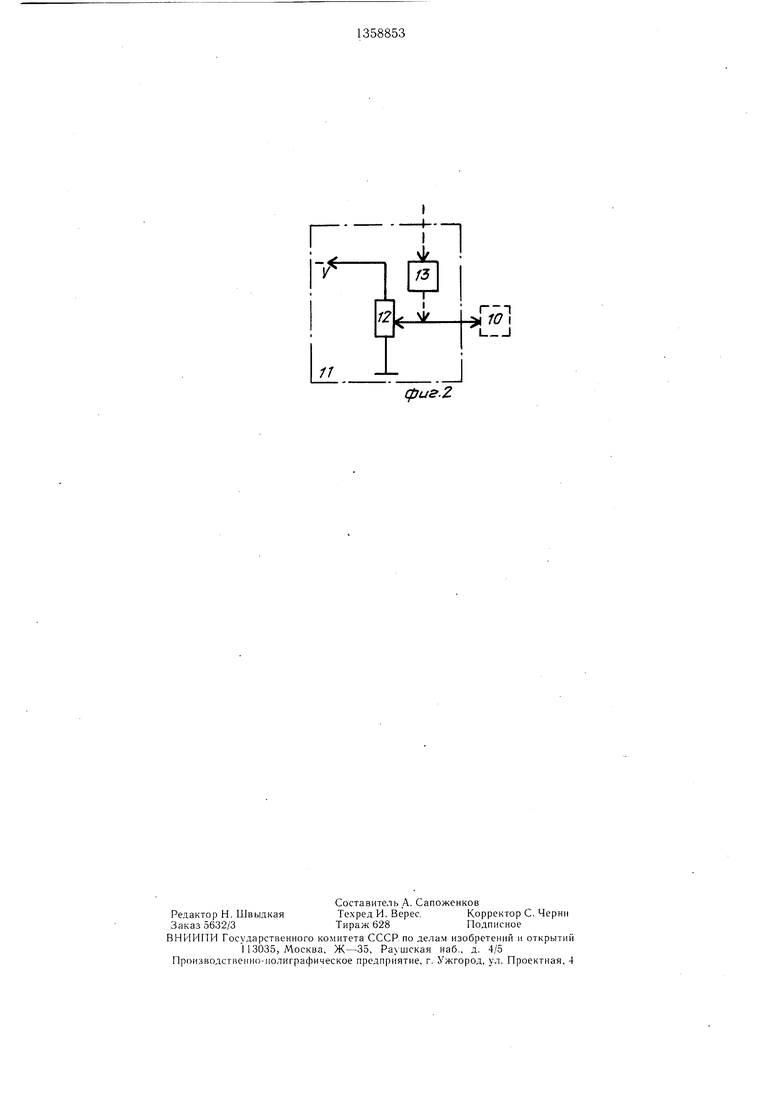
На фиг. 1 прдставлена функциональная схема автоматизированной оросительной системы; на фиг. 2 - схема датчика местоположения дождевальной машины.
Автоматизированная оросительная система содержит водораспределитель 1, оросительный канал 2 с дождевальной .машиной 3, затвором-водосливом 4 в конце канала и затвором 5 водозаборного сооружения, связанного с регулятором б уровня воды, вход которого соединен с элементом 7 сравнения, связанным с датчиками 8 и 9 уровней воды в начале и в конце канала.
Выход датчика 9 уровня воды в конце канала подключен к входу элемента 7 сравнения через сумматор 10, второй вход которого соединен с выходом датчика 11 местоположения дождевальной машины.
Датчик II местоположения дождевальной машины выполнен в виде потенциометра 12 с механическим редуктором 13, соединенным с приводо.м дождевальной машины 3.
Оросительный канал 2 вынолнен открытым для пропуска заданного расхода н уклоном дна до 0,01.
Оросительная система работает следующим образом.
В исходном положении дождевальная машина 3, находящаяся на произвольной позиции, отключена, затвор 5 водозаборного сооружения закрыт, в оросительном канале 2 образуется горизонтальная поверхность воды и перелив через затвор-водослив 4 отсутствует. В этом состоянии сигнал на выходе сумматора 10, равный сумме сигналов датчика 11 местоположения дождевальной машины 3 и датчика 9 уровня воды в конце канала, уравновешен сигна.чо.м датчика 8 уровня воды в начале канала, а поэтому сигнал рассогласования на выходе элемента 7 сравнения отсутствует.
При включении дождевальной машины 3 уровень воды в канале 2 уменьшается, нарушается баланс сигналов сумматора 10 и датчика 8 уровня воды в начале капала, поступающих на элемент 7 сравнения, и но его выходе появляется сигнал рассогласования, на основании которого формируется воздействие регулятора 6 на открытие затвора 5. Когда затвор 5 водозаборного сооружения открывается на требуемую величину, в оросительном канале устанав
ливается новый установившийся режим с ли-
0
5
0
5
0
0
5
0
нией свободной поверхности воды, определяемой местоположением и расходом дождевальной машины, и сигнал па выходе сумматора 10 сбалансируется сигналом датчика 8 уровня воды. В случае уменьшения расхода воды дождевальной .машины, например, при засорении растительностью ее водозаборного устройства нарушается баланс .между водоподачей и водопотребле- нием, увеличивается уровень воды в оросительном канале, на выходе элемента 7 сравнения появляется сигнал рассогласования и регулятор 6 уровня воды уменьшает водо- подачу на величину, равную из.менению расхода дождевальной машины 3.
Изменение уровней воды в ороситель- но.м канале происходит не только в результате нарушения баланса расходов, но и при перемещении дождевальной машины, причем движение ее вниз но каналу вызывает уменьшение уровня воды в конце. Интенсивность изменения уровня воды в конце канала пропорциональна уклону дна и скорости движения мапшны.
Для устранения возмущения, вносимого перемещением дождевальной мащины 3, изменение сигнала датчика 9 уровня воды в конце канала ко.мпенсируется сигналом датчика 11 местоположения дождевальной мащины, происходит увеличение сигнала датчика 11, в результате чего сигнал па выходе сумматора 10 остается постоянным. Это достигается за счет того, что датчик 11 .местоположения дождевальной мащины 3 связан с ее приводо.м посредством механического редуктора 13, передаточное число которого определяется длиной оросительного канала 2 и уклоном его дна. При движении оросительной машины интенсивность изменения сигналов датчика 9 уровня воды в конце канала равна интенсивности изменения сигнала на выходе датчика 11 местоположения дождевальной машины.
Формула изобретения
Автоматизированная оросительная система, содержащая оросительный канал с дождевальной .машиной и затвором-водосливом, датчики уровней в начале и в конце канала, соединенные с элементом сравнения, выход которого через регулятор уровня соединен с приводом затвора водозаборного сооружения в начале канала, отличающаяся тем, что, с целью уменьшения резервных емкостей канала и непроизводительных сбросов воды, система содержит последовательно соединенные датчик местоположения дождевальной машины и сумматор, включенный между датчиком уровня воды в конце канала и элементом
cpus.Z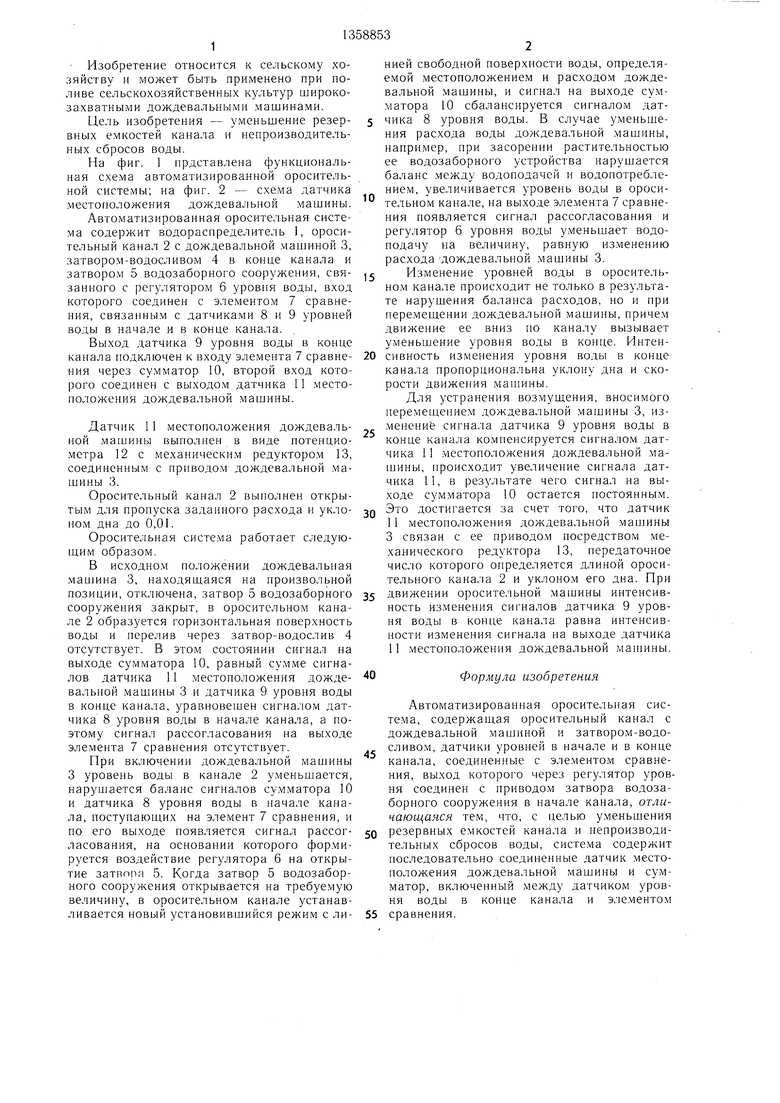
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления водоподачей в оросительный канал с дождевальной машиной и устройство для его осуществления | 1986 |
|
SU1351994A1 |
| Оросительная система | 1984 |
|
SU1275073A1 |
| Автоматизированная оросительная система | 1985 |
|
SU1287793A1 |
| Способ управления водоподачей в оросительный канал с дождевальной машиной и устройство для его осуществления | 1985 |
|
SU1323649A1 |
| Автоматизированная оросительная система | 1988 |
|
SU1551291A1 |
| Автоматизированная оросительная система | 1985 |
|
SU1319804A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2009 |
|
RU2402199C1 |
| Автоматизированная оросительная система | 1986 |
|
SU1412667A1 |
| Автоматизированная оросительная система | 1983 |
|
SU1165312A1 |
| Система управления водоподачей в ороситель с дождевальной машиной | 1987 |
|
SU1496718A1 |
Изобретение относится к сельскому хозяйству и может быть применено при поливе сельскохозяйственных культур широкозахватными дождевальными машинами (ДМ). Цель изобретения - уменьшение резервных емкостей канала и непроизводительных сбросов воды. .Автоматизированная оросительная система содержит водораспределитель 1, оросительный канал 2 с ДМ 3. Затвор-водослив 4 установлен в конце канала. Затвор 5 выполнен рядом с входом водозаборного сооружения. Водозаборное сооружение связано с регулятором 6 уровня воды, вход которого соединен с элементом сравнения 7. Элемент сравнения 7 и.меет связь с датчиками 8 и 9 уровней воды в начале и конце канала. Выход датчика 9 уровня воды в конце канала подключен к входу элемента сравнения 7 через сумматор 10. Второй вход сумматора 10 соединен с выходом датчика 11 местоположения ДМ 3. Датчик 11 местоположения ДМ 3 выполнен в виде потенциометра с механическим редукторо.м. соединенным с приводом ДМ 3. 2 ил. ( (Л со ел сх оо ел со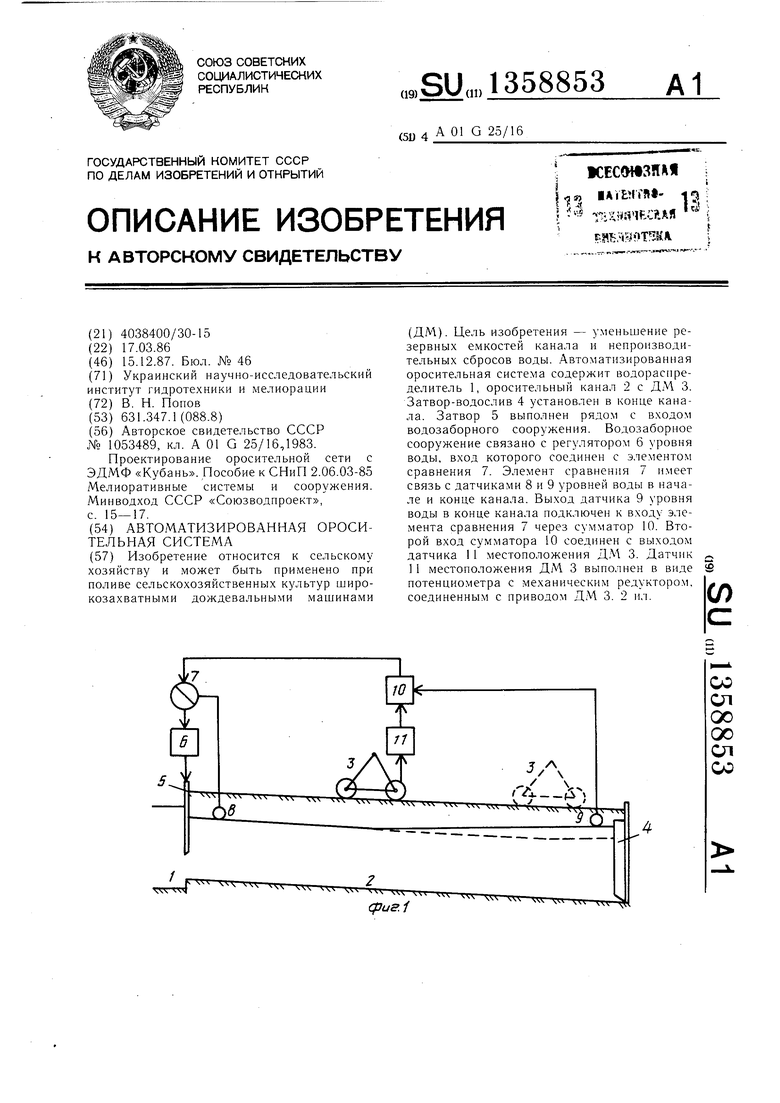
| Авторское свидетельство СССР Jsfo 1053489, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проектирование оросительной сети с ЭДМФ «Кубань | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Минводход СССР «Союзводпроект, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
