Изобретение относится к измерительной технике, в частности к устройствам для измерения линейных перемещений, и может быть использовано в высокоточных следящих измерителях линейных перемещений, в интерференционных дилатометрах.
Целью изобретения является увеличение точности измерений линейных пе- ю мента И 20 соединен с вычитающим
ремещений за счет уменьщения ошибок,
вызванных pa3BopoTat iH и деформациями
интерференционной картины, а также
расширение диапазона измерений за счет
счет введения следящего режима. 15
На фиг.1 изображена блок-схема устройства для измерения линейных перемещений на фиг.2 - блок-схема бло- . ка цифровой фильтрации; на фиг.З - блок-схема следящего измерителя; на фиг.4 - блок-схема блока формирования приведенного значений линейного перемещения .
Устройство для измерения линейных перемегиений содержит интерферометр 1, основную 2 и дополнительные 3.1,.. 3
20
п линейки фотоприемников, объединенные в матрицу, п+1 систему 4 считывания и аналого-цифрового преобразования информации, подключенные к линейкам, п+1 цепочку, каждая из которой состоит из блока 5 цифровой фильтрации и следящего измерителя 6 изменения синусоидальных сигналов, и блок 7 формирования приведенного значения линейного перемещения.
Блок 5 цифровой фильтраций (фиг.2) состоит из регистра 8 сдвига, к выходам отдельных разрядов которого подключены соответствующие входы сумматора 9.
Следящий измеритель 6 изменений синусоидальных сигналов, соответст- вуюищй распределению интенсивности
входом реверсивного 22, а выход элемента И 21 - с суммирующим входом счетчика 22.
Выход формирователя 23 полного слова соединен с входом запоминающего элемента 24 и суммирующим входом вычитающего сумматора 25. Выход элемента 24 соединён с вычитающим входом сумматора 25.
Выход сумматора 25 является выхо дом измерителя 6, вторым входом фор мирователя 23 полного слова из цело и дробной его частей, первый вход которого соединен с выходом счетчик 25 22. Первьш выход компаратора 18 сое динен с первым входом элемента И 20 а второй выход компаратора 18 - с первым входом элемента И 21. Первый выход компаратора 19 соединен с вто рым входом элемента И 21, а второй выход компаратора 19 - с вторым вхо дом элемента И 20.
Блок 7 (фиг.4) формирования приведенного значения линейного перемещения состоит из запоминающего эл мента 26, перемножителей 27-29 по числу каналов измереш1я линейных пе ремещений, первые входы которых под ключены к выходам следящих измерите 40 лей 6 перемещений соответствующего канала, а вторые т к выходам запоминающего элемента 26, в котором хр нятся весовые коэффициенты. Выходы перемножителей 27-29 соединены с вх
30
35
интерференционной картины вдоль линии 45 сумматора 30„ Выход сумматора
расположения фотоприемников (фиг.З), состоит из генератора 10.синусоидального и косинусоидального сигналов, к выходам которого подключены вторые входы перемножителей 11 и Ц, первые входы которых соединены с выходом блока 5 цифровой фильтрации. Выход перемнонсителя 11 соединен со входом сумматора-накопителя 13, а выход перемножителя. 12 - с входом сумматора- накопителя 14. Выход сумматора 13 соединен с входом делимого делителя 15, а выход сумматора 14 - с входом делителя 15. Выход делителя 15 сое50
55
является выходом всего устройства.
Устройство работает следующим об разом..
Измерения линейньк перемещений проводятся в следящем режиме через интервалы времени At, при этом at v«: A/4, где - длина волны света, используемого в интерферометре 1, V - скорость перемещений.
По результатам измерений п ремещ ний на смежных интервалах формирует ся значение перемещений за любой ин тервал времени.
динен с входом функционального элемента 16, Выход элемента 16 соединен с входами запоминающего элемента 17 и двухпорогового компаратора 18. Выход элемента 17 соединен с входами двухпорогового компаратора 19.
Блок 6 содержит также элементы И 20 и 21 и счетчик 22. Выход эле-(
входом реверсивного 22, а выход элемента И 21 - с суммирующим входом счетчика 22.
Выход формирователя 23 полного слова соединен с входом запоминающего элемента 24 и суммирующим вхо. дом вычитающего сумматора 25. Выход элемента 24 соединён с вычитающим входом сумматора 25.
Выход сумматора 25 является выходом измерителя 6, вторым входом формирователя 23 полного слова из целой и дробной его частей, первый вход которого соединен с выходом счетчика 22. Первьш выход компаратора 18 соединен с первым входом элемента И 20, а второй выход компаратора 18 - с первым входом элемента И 21. Первый выход компаратора 19 соединен с вторым входом элемента И 21, а второй выход компаратора 19 - с вторым входом элемента И 20.
Блок 7 (фиг.4) формирования приведенного значения линейного перемещения состоит из запоминающего элемента 26, перемножителей 27-29 по числу каналов измереш1я линейных пе- - ремещений, первые входы которых подключены к выходам следящих измерите- лей 6 перемещений соответствующего канала, а вторые т к выходам запоминающего элемента 26, в котором хранятся весовые коэффициенты. Выходы перемножителей 27-29 соединены с вхо
0
5
является выходом всего устройства.
Устройство работает следующим образом..
Измерения линейньк перемещений проводятся в следящем режиме через интервалы времени At, при этом at v«: A/4, где - длина волны света, используемого в интерферометре 1, V - скорость перемещений.
По результатам измерений п ремеще- ний на смежных интервалах формируется значение перемещений за любой интервал времени.
В устройстве используется интерферометр 1, в котором формируется картинч в виде параллельных светлых и темных полос. Перемещение подвижного отражателя при соответствующей настройке интерферометра 1 приводит к сдвигу полос в направлении, перпендикулярном полосам. Перемещение отражателя на величину 1, измеряемую в длинах волн света, приводит к смещению интерференционных полос на величину .1, измеряемую в наблюдаемых на интерференционных картине периодах полос.
В направлении, перпендикулярном полосам или близком к нему, распределение интенсивности света подчинено синусоидальному закону.
По изменению синусоидального сигна-20 составляющие ошибки, но и случайные.
ла находят перемещения отражателя, связанного с объектом. Изменение синусоидального сигнала на величину, не соответствующую перемещению полос, превышающему период, измеряют с по- мощью фазометров. Измерения перемещений на величины, большие периода, выполняются в следящем режиме так, чтобы выполнялись указанные ограничения на ut. ,-
В еличины перемещений записываются в виде a(k), b(k), где a(k) и b(k)- целая и дробная части k-ro измерения перемещений объекта в длинах волн света. Правило записи целой части отсчета при последовательных измерениях следующее:
если (k-1)0,2 и 0,(k) 1,0 то a(k) a(k-1)-1i если 0,(k-1) 1,0 и (k),2, то a(k)a(k-1)-H} в остальных случаях a(k)a(k-l)
Используя следящий режим измерений и приведенное правило записи целых частей отсчетов, можно измерять любые имеющие практическое значение перемещения.
Для уменьшения ошибок, вызванных разворотами и деформациями интерференционной, картины, приведенное значение подсчета перемещений вычисляет-
ся как |ц /А (Я (ii
М 1 й1 Ч-ь Ь йГ /.
Коэффициенты |3 зависят от расположения фотоприемников и заранее рассчитываются .
Пример. Уменьшение ошибок при измерении двумя линейками с приведением отсчетов к средней точке по отн&шению к измерению одной линейкой.
Линейки располагают на расстоянии 2h параллельно одна другой и перпендикулярно полосам. Приведенный отсчет l ()/2, где 1, Ij- отсчеты положения полос по первой и второй линейкам. Если произошел разворот полос на„ угол oi относительно точки, лежащей на расстоянии h от каждой
полосы на линии середины полосы, то середина полосы перемещается по одной линейке на величину h tgiv:, а по другой на - h tg6i.
Приведенный отсчет 1 (1,+h tg(5(, +
Ij h tgtii)/2 не изменяется, тогда как измерения по любой одной линейке дают смещение показаний на h tgoi. Вычисление приведенного отсчета уменьшает не только систематические
5
5 0
0
Интерференционная картина с выхода интерферометра 1 воспринимается линейками 2 и 3 фотоприемников. Система 4 считьшания последовательно опрашивает каждый фотозлемент, ана- логр-цифровой преобразователь преобразует значение интенсивности света в окне опрашиваемого фотоэлемента в код х- , где i - номер фотоэлемента J-и линейки. При последовательном опросе элементов фотоприемников на выходе системы 4 действует сигнала X с синусоидальной огибающей. Для уменьшения влияния флуктуационных помех последовательность х- подвергается скользящей фил ьтрации в блоке 5.
В регистр 8 сдвига последовательно вводится х.. Ввод сопровождается сдвигом по регистру. Задержанные в регистре значения х поступают на входы сумматора 9 (взвешенного суммирования) , выходом которого является сигнал
(x, xj ... х )
-- ( 1-э
5.«
I-S
oi - весовые коэффициенты, которые либо вычисляются заранее и хранятся в постоянном запоминающем устройстве, либо являются функциями входных данных.
Отфильтрованный синусоидальный 55 сигнал х поступает в следящий измеритель 6 перемещений синусоидального а гкала:. Здесь последовательность х умножается на синусоидальную и ко- синусоидальную последовательности.
513
Значения произведений накапливаются в сумматорах 13 и 14, и по окончании .толнения перемножений всех N элементов k-ro измерения перемещений последовательности формируется частное.
21 )5in2 ir;/T
,N,
y(k)
Zlx (k) cos 27; /T
где Т - период следования полос вдоль линии расположения фотоприемников. Функциональные преобразования элеЗначение перемещения синусоидал ного сигнала формируется в суммато ре 25 из значения кодов, храйящих в элементе 24 и действующих на вых де формирователя 23. В элемент 24 в начальном цикле измерения записы вается содержимое выхода формиров теля 23-, т.е. сигнал а (0); ЬЧО) 0 При дальнейших измерениях он не и меняется.
Выход вычитающего сумматора 25 есть,разность:
-- - -- ментом 16 переменной у (k) по закону ilMk) iMk) - 1 (0) , ь
b (k) i arctg у (k) с,сигналь (k) является выходом k-o
измерения перемещений по j-каналу
Из приращений положения по каждому каналу (k) в блоке 7 формирудает значение фазы синусо1щапьного сигнала.или дробную часть отсчета перемещений Ь (k).20 ется приведенное значение отсчетов
, Дробная часть отсчета перемещенийперемещений к концу k-ro цикла измеЬ (k) с выхода элемента 16 сравнива-рения. В блоке 7 (фиг.4) формируется
ется в постоянными порогами уровней У произведений отсчетов AlMk)
0,2 и 0,8 в компараторе 18, с такими величины весовых коэффициентов,
же уровнями сравнивается в компарато-Выбором весовых коэффициентов, которе 19 предыдущее значение отсчета дробной части перемещений b (k-l), запомненное на предыдущем такте измерений в элементе 17.
На выходах 1 компараторов 18 и i 9 появляется .сигнал Лог. 1,если 0,2, и на выходах 2, если 0,,0
Выходы компараторов 18 и 19 анализируются логическими элементами И 20 и 21 .
В случае, когда на первом выходе компаратора 18 и на втором выходе компаратора 19 появляются 1, к содержимому реверсивного счетчика 22, в котором хранятся текущие значения целой части отсчета перемещений, добавляется единица. Если же 1 по- являются на первых выходах компаратора 19 и на втором выходе компаратора 18, то из содержимого счетчика 22 вычитается единица. Во всех остальных случаях содержимое счетчика не меняется.
По окончании формирования целой . части отсчета на k-м цикле измерения в элемент 17 записьшается значение дробной части отсчета Ь (k) .
В формирователе 23 из целой и дробной частей составляется полное слово величины положения синусоидального сигнала отибсительно выбранного начала Ътсчета приписывани- .ем целой части отсчета к дробной.
6
Значение перемещения синусоидального сигнала формируется в сумматоре 25 из значения кодов, храйящихся в элементе 24 и действующих на выходе формирователя 23. В элемент 24 в начальном цикле измерения записывается содержимое выхода формирователя 23-, т.е. сигнал а (0); ЬЧО). При дальнейших измерениях он не изменяется.
Выход вычитающего сумматора 25 есть,разность:
-- - ilMk) iMk) - 1 (0) , ь
сигналь (k) является выходом k-o
измерения перемещений по j-каналу.
Из приращений положения по каждому каналу (k) в блоке 7 формируется приведенное значение отсчетов
рые хранятся в запоминающем элементе 26, выполняется приведение отсчетов перемещений к любой прямой нормальной плоскости неподвижного отражате- 30 ля интерферометра, а также обеспечивается задание удобных единиц измерения.
V
Формула, изобретения
35
Устройство для измерения линейных перемещений, содержащее интерферометр, основную линейку фотоприемников, оптически связанную с интер40-ферометром, первую систему считьюа- ния и аналого-цифрового преобразования информации, связанную с основной линейкой фотоприемников, отличающееся тем, что, с
45 целью, увеличения точности и расширения диапазона измерений, оно снаб- жено п дополнительными линейками фотоприемников, где пЯ расположенными параллельно одна другой и основ50 ной линейке фотоприемников и предназначенными для образования сов-/ местно с ней матрицы фотоприемников, п системами считывания и анапого- цифрового преобразования информации,
55 идентичными первой и подключенными к выходам соответствующих дополнительных линеек, фотоприемников, п+1 цепочками, содержащими блок цифровой фильтрации цепочек и следящий измеригель изменений синусоидальных сигналов, блоком формирования приведенного значения линейного перемещения, входы которого соединены с выходами следящих измерителей перемещений цеXi
почек, входы блоков цифровой фильтрации цепочек соединены с выходами соответствующих систем считьгоания и аналого-цифрового преобразования информации .
фиг2


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения линейных перемещений объекта | 1989 |
|
SU1740992A1 |
| Устройство для измерения линейных перемещений | 1990 |
|
SU1679188A1 |
| Устройство для измерения частотно-контрастной характеристики фотоприемников | 1983 |
|
SU1144032A1 |
| Оптико-электронное устройство для измерения линейных перемещений объектов | 1980 |
|
SU939937A1 |
| Оптико-электронное устройство для измерения линейных перемещений объектов | 1982 |
|
SU1055966A1 |
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ И ПЕРЕМЕЩЕНИЙ | 2009 |
|
RU2393427C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ РЕФРАКТОМЕТР | 1987 |
|
SU1498192A1 |
| Устройство определения степени и места возмущения зонной волоконно-оптической системы охраны объектов | 2022 |
|
RU2836460C2 |
| Устройство для измерения перемещений объекта | 1980 |
|
SU1716315A1 |
| Устройство для измерения длин | 1984 |
|
SU1259111A1 |


Изобретение относится к измерительной технике, в частности к устройствам для измерения линейных перемещений, и может быть использовано в высокоточных следящих измерителях / 3/ / линейных перемещений, в интерференг. ционных дилатометрах. Целью изобретения является увеличение точности измерений линейных перемещений за счет уменьщений ошибок, вызванных разворотами и деформациями интерференционной картины, а также расщирение диапазона измерений за счет введения следящего режима. Устройство содержит помимо основной линейки 2 фотоприемников по крайней мере еще одну дополнительную линейку 3 фотоприемников. Система линеек 2,3 образует матрицу, которая позволяет находить изменения положения плоскости отражателя интерферометра 1 по изменению положения полос интерференционной картины. 4 ил. с (Л фиг.1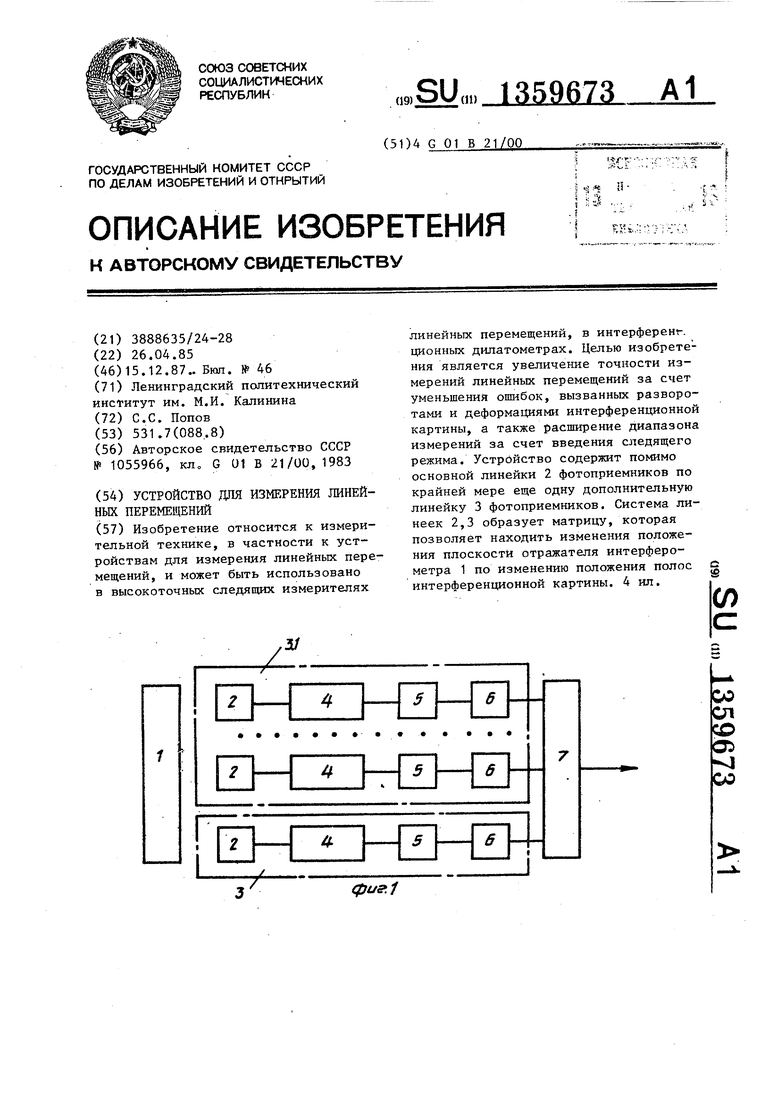
dL
j-f
26
30
i
29
фиг
Редактор Л. Повхан
Составитель Е. Глазкова Техред М.Дидык Корректор В. Бутя га
Заказ 6146/44 Тираж 677Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35; Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Оптико-электронное устройство для измерения линейных перемещений объектов | 1982 |
|
SU1055966A1 |
