Устройство относится к измерительной технике и предназначено для бесконтактного измерения дальности до объекта и величины его перемещения с нанометрическим разрешением.
Лазерные измерители перемещений, разработанные на основе лазерных интерферометров Майкельсона либо лазерных доплеровских интерференционных преобразователей, не имеют механического контакта с объектом и обеспечивают возможность дистанционных измерений скорости и длины с высокой точностью.
Известны интерференционные измерители линейных перемещений, которые содержат лазерный источник излучения, оптический интерферометр Майкельсона с фотоэлектрической системой преобразования модулированного светового потока в последовательность прямоугольных импульсов и процессор для получения результата измерения [1, 2]. Частота следования прямоугольных импульсов соответствует скорости объекта, а период следования этих импульсов соответствует половине длины волны стабилизированного по частоте лазера. Перемещение объекта производится вдоль лазерного пучка измерительного плеча интерферометра. Такие измерители предназначены для прецизионных абсолютных измерений длины. Они позволяют измерять длину с высокой разрешающей способностью (доли нанометра) и точностью. Максимальная измеряемая длина зависит от мощности излучения лазера и не превышает несколько десятков метров. Такие измерители требуют при их создании дорогостоящих оптических узлов и не позволяют использовать их в тех случаях, когда поверхность объекта измерения является рассеивающей, а не зеркальной.
Известны лазерные измерители длины, построенные на основе лазерных доплеровских интерференционных преобразователей скорости движущихся объектов [3-7]. Лазерный интерференционный преобразователь выполняет пассивные функции и предназначен для формирования мнимой или действительной решетки интенсивности, проецируемой с помощью оптической системы на объект перемещения. Интерференционная решетка задает необходимую метрику пространства. Интерференционный сигнал получается за счет дифракции света на частицах, пересекающих световую решетку. На практике широко используется схема, где два пучка двухлучевого интерферометра фокусируются объективом в исследуемую область. При пересечении пучков под определенным углом образуется интерференционная решетка. Рассеивающая частица объекта перемещения, проходя сквозь такую решетку, дает импульс сигнала на фотодетекторе, модулированный с частотой, обратной периоду решетки и пропорциональной скорости перемещения объекта. Измеряя частоту сигнала при известной длине волны лазера и геометрии интерферометра, можно определить скорость движения объекта, а суммируя значения скорости, умноженной на время между отсчетами скорости, - величину перемещения объекта за полное время его движения. Хотя такие измерители позволяют измерять достаточно большие перемещения (десятки и более метров) объектов с диффузно отражающей поверхностью. Погрешность таких измерителей достаточно высока и составляет десятки микрон.
Известны лазерные интерферометры линейных перемещений, основанные на явлениях оптической обратной связи в полупроводниковых лазерах [8, 9]. Такие измерители перемещений содержат полупроводниковый лазер с встроенным в него фотодиодом. Излучение лазера через коллиматор направляется на объект перемещения. В состав интерферометра входят также трансимпедансный усилитель, низкочастотный фильтр, два формирователя счетных импульсов, реверсивный счетчик импульсов и дисплей результата измерения. Указанные измерители не требуют дорогостоящих оптических узлов и позволяют измерять перемещение объектов с диффузно отражающей поверхностью в диапазоне от нескольких десятков сантиметров до 2-2,5 метров. При этом разрешающая способность измерителей равна половине длины волны излучения полупроводникового лазера. Такой измеритель перемещений не позволяет проводить измерение перемещений с нанометрическим разрешением.
Известны также измерители дальности [10-14], основанные на использовании как явлений оптической обратной связи, так и частотной модуляции излучения в полупроводниковых лазерах. Датчиком интерференционного сигнала является полупроводниковый лазер со встроенным фотодиодом и применение таких датчиков в указанных измерителях позволяет практически исключить применение элементов традиционной оптики. В основу таких измерителей положено свойство полупроводниковых лазеров изменять частоту излучения под воздействием изменений инжекционного тока. При небольших изменениях тока (до 5%) частота излучения линейно связана с ним. Если модуляция изменяется линейно во времени, то при неподвижном объекте частота интерференционного сигнала будет величиной постоянной и пропорциональной дальности до него, а полная разность фаз этого сигнала при движении объекта будет соответствовать величине перемещения объекта.
Наиболее близким техническим решением по отношению к заявляемому устройству является лазерный измеритель расстояния до объекта [14]. Измеритель расстояния содержит полупроводниковый лазер с фотоприемным устройством, оптически связанный через коллиматор с диффузно-отражающим объектом, расстояние до которого требуется измерить, модулятор тока лазера, блок термостабилизации лазера и электронный блок обработки выходного сигнала фотоприемника, обеспечивающий получение значения дальности до объекта с погрешностью 1-1.5 мм. В этом устройстве также используется свойство оптической обратной связи и частотная модуляция излучения лазера. Однако этот измеритель не позволяет измерять перемещения объекта. В работах [10-15] для устройств с отмечавшимися выше датчиками интерференционного сигнала приведены зависимости между характеристиками интерференционного сигнала (частота, фаза) и величинами некоторых измеряемых параметров, например расстояния до объекта, его скорости и перемещения. Показано, что при использовании рассматриваемых датчиков (лазер плюс фотодиод) сигнала дальность (расстояние до рассеивающего объекта) определяется частотой интерференционного сигнала. Если объект неподвижен, то частота интерференционного сигнала строго соответствует расстоянию до объекта. Величину перемещения рассеивающего объекта можно определить путем вычисления сдвига фазы интерференционного сигнала, возникающего при перемещении объекта. Эти положения и использованы в предлагаемом техническом решении.
В предлагаемом лазерном измерителе дальности и линейных перемещений указанный недостаток прототипа (невозможность измерения перемещений) устраняется за счет того, что в электронный блок обработки сигнала фотодиода введены новые электронные узлы. Эти узлы обеспечивают формирование не только сигналов, обеспечивающих измерение дальности до объекта, но и сигналов, позволяющих производить измерение и подсчет целого числа периодов интерференционных полос и величины его дробной части, что и обеспечивает измерение величины перемещения.
Измерение этих параметров достигается за счет того, что в лазерном измерителе дальности, содержащем полупроводниковый лазер с фотоприемным устройством, оптически связанный через коллиматор с диффузно-отражающим объектом, модулятор тока лазера и блок термостабилизации лазера, в электронный блок обработки интерференционного сигнала фотодиода введено операционное устройство, к неинвертирующему входу которого подключен выход фотодиода, а инвертирующий вход соединен с первым дополнительным выходом модулятора. Это позволяет в выходном сигнале фотодиода устранить принципиально присутствующую помеху, обусловленную модуляцией тока лазера. Ко второму дополнительному выходу модулятора последовательно подсоединены формирователи синхроимпульса и строб-импульса, запрещающие работу устройства на время переходного процесса, вызванного скачкообразным изменением модуляционного тока. К выходу операционного устройства последовательно подключены компаратор и первый вход блока формирования трех импульсных сигналов. Выходным сигналом компаратора является последовательность прямоугольных импульсов с частотой интерференционного сигнала. Второй вход блока формирования трех импульсных сигналов соединен с выходом формирователя строб-импульса. Первый и второй выходы упомянутого блока формирования соединены соответственно с измерителями длительностей начальной фазы и периода интерференционного сигнала, а выходы указанных измерителей и третий выход формирователя трех импульсных сигналов соединены с шиной компьютера. Измерители длительностей преобразуют свои входные сигналы в цифровой код. Прием данных от измерителей и формирователя трех импульсов и управление их работой осуществляется по шине компьютера.
Новыми, относительно выбранного прототипа [14], являются вновь введенные элементы устройства и связи между ними. К ним относятся: операционное устройство, один из входов которого подключен к первому дополнительному выходу модулятора тока полупроводникового лазера с целью компенсации модуляционной помехи в выходном сигнале фотодиода; формирователь синхроимпульсов и формирователь импульсов фиксированной длительности (строб-импуьс), запрещающие работу устройства на время переходных процессов; компаратор, формирующий импульсы с частотой интерференционного сигнала; блок формирования трех импульсных сигналов и измерители (в цифровом виде) его выходных сигналов; компьютер, управляющий работой устройства.
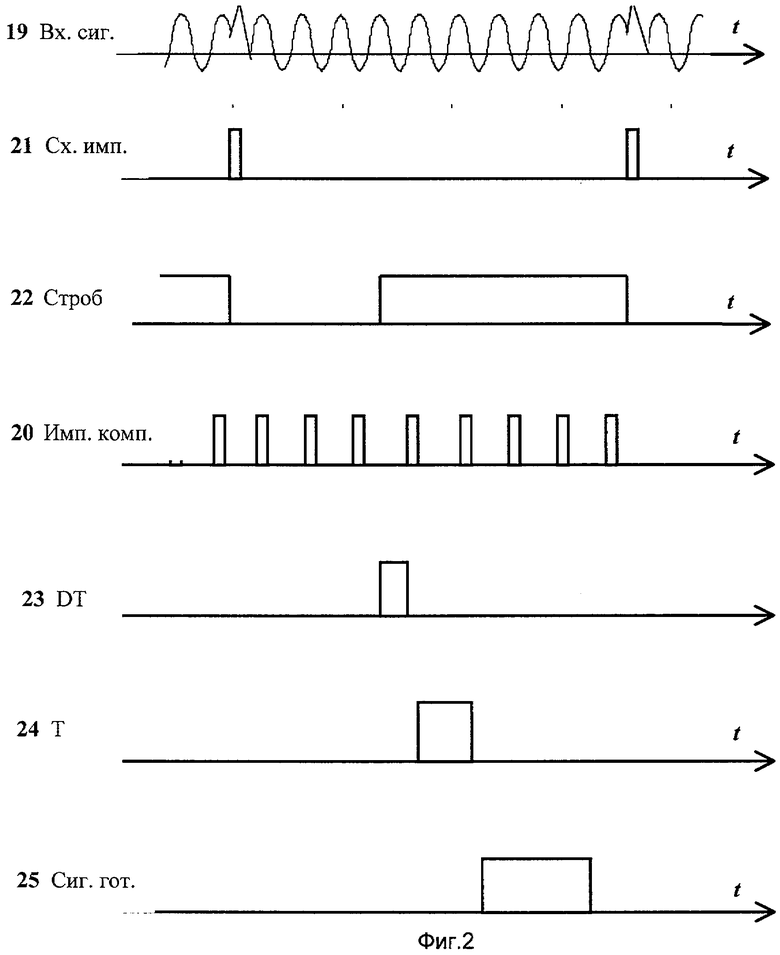
На фиг.1 представлена схема предлагаемого лазерного измерителя дальности и линейных перемещений. На фиг.2 представлены временные диаграммы сигналов в различных точках схемы измерителя.
Лазерный измеритель (фиг.1) содержит полупроводниковый лазер 1, оптически связанный через коллиматор 2 с диффузно-отражающим объектом 3, расстояние до которого требуется измерить, встроенный в полупроводниковый лазер фотоприемник 4, блок термостабилизации 5, модулятор 6 тока лазера, подключенный к полупроводниковому лазеру, и электронный блок 7 обработки выходного сигнала фотоприемника. Полупроводниковый лазер и фотоприемник образуют датчик интерференционного сигнала. Электронный блок обработки 7 содержит операционное устройство 8, формирователь 9 синхроимпульсов, формирователь 10 стробирующих импульсов фиксированной длительности. В электронный блок обработки 7 также входят компаратор 11, блок формирования 12 трех импульсных сигналов, блоки 13 и 14 измерения соответственно длительностей текущей фазы и периода интерференционного сигнала, компьютер 15 для вычисления результата измерения и шина 16 данных и управления для связи компьютера с блоками 12-14. Неинвертирующий и инвертирующий входы операционного устройства 8 обозначены соответственно цифрами 17 и 18. Фотоприемник 4 полупроводникового лазера 1 соединен с неинвертирующим входом 17 операционного устройства 8, инвертирующий вход 18 которого соединен с первым дополнительным выходом модулятора тока лазера. Выходные сигналы блоков 8, 11, 9 и 10 обозначены соответственно цифрами 19, 20, 21 и 22, а выходные сигналы формирователя 12 обозначены цифрами 23,24 и 25. На выходе 19 операционного устройства 8 формируется интерференционный сигнал, изображенный на фиг.2 (19 Вх. сиг.).
Работает устройство следующим образом. Ток полупроводникового лазера 1 изменяется модулятором 5 по линейному закону. В данном случае модуляционный ток изменяется по пилообразному закону. Модулированный таким образом пучок через коллиматор 2 направляется на исследуемый объект. Рассеянное им излучение попадает обратно в активную среду лазера, где усиливается и интерферирует с исходным излучением, поскольку из-за конечного значения скорости света рассеянное излучение приходит в полупроводниковый лазер с некоторой задержкой. Вследствие этой задержки частота этого излучения не совпадает с частотой, генерируемой полупроводниковым лазером в данный момент. В результате на выходе встроенного в полупроводниковый лазер 1 фотодиода 4 возникает электрический сигнал, параметры которого несут информацию об отражающей поверхности объекта, его удаленности и характеристиках движения. При модуляции лазера пилообразным током изменяется не только частота излучения, но и мощность лазера. Поэтому сигнал на выходе фотодиода 4 (шина 17), кроме полезной интерференционной части, содержит пилообразную помеху. Эта помеха убирается благодаря тому, что на инвертирующий вход операционного устройства 8 (шина 18) подается сигнал пилообразной модуляции с первого дополнительного выхода модулятора 6. Выходной сигнал 19 операционного устройства 8 поступает на вход компаратора 11 и преобразуется на его выходе 20 в последовательность прямоугольных импульсов (фиг.2, 20 Имп. комп.). Эти импульсы поступают на первый вход формирователя 12 трех импульсных сигналов, на второй вход (шина 22) которого поступает строб- импульс с формирователя 10. Синхроимпульс (фиг.2, 21 Сх. имп.) формирователя 9, запускаемого сигналом со второго дополнительного выхода модулятора, появляется в начале каждого цикла модуляции на выходе 21 и запускает формирователь 10, выходной импульс (фиг.2, 22 Строб) которого используется в формирователе 12 трех импульсных сигналов для запрещения прохождения интерференционного сигнала с выхода 20 компаратора 11 на время, соответствующее переходному процессу во время скачкообразного изменения пилообразного модулирующего тока.
Формирователь 12 выделяет из сигнала компаратора на первом 23 и втором 24 выходах сигналы (фиг.2), длительности которых соответствуют величинам начальной фазы (23 DT) и периода (24 Т) интерференционного сигнала. Сигнал на шине 23 формируется по заднему фронту строб-импульса, а сигнал на шине 24 формируется задними фронтами двух соседних импульсов с выхода компаратора, и поэтому его длительность равняется длительности периода интерференционного сигнала. Эти сигналы поступают на входы измерителей длительности 13 и 14, соответствующих начальной фазе и периоду 1 интерференционного сигнала, преобразуются в цифровой код и поступают на шину компьютера. На третьем выходе 25 формирователя 12 формируется сигнал (фиг.2, 25 Сиг. гот.), сигнализирующий о завершении процессов измерения начальной фазы и периода интерференционного сигнала (сигнал готовности). Компьютер определяет момент появления этого сигнала, после чего считывает в свою память данные о начальной фазе и периоде интерференционного сигнала. Этот процесс одинаков для процесса измерения как дальности, так и величины перемещения объекта. Различия состоят лишь в дальнейшей обработке этих данных.
Для измерения дальности компьютер вычисляет частоту интерференционного сигнала как величину, обратную измеренному периоду. Для получения результата измерения дальности в метрической системе единиц значение частоты умножается на соответствующий коэффициент пропорциональности.
Для измерения величины перемещения компьютер использует иной алгоритм. Значения отрезков времени, соответствующих текущей фазе и периоду интерференционного сигнала, используются компьютером для вычисления текущей фазы, выраженной в частях периода интерференционного сигнала. Частота считывания этих интервалов времени должна, по меньшей мере, превышать частоту модуляции тока лазера в четыре раза. При перемещении объекта компьютер сравнивает значения текущей и предыдущей фаз. Если он обнаруживает скачок фазы, абсолютное значение которого превышает 0.5 периода, то в зависимости от знака этого скачка к текущему значению фазы прибавляет один период. Если знак скачка отрицательный, то единица суммируется со знаком плюс, а если знак скачка положительный, то единица суммируется со знаком минус. Знак скачка фазы определяет направление движения объекта, а суммируемая единица свидетельствует о том, что объект перемещения сместился на величину, равную одному периоду интерференционного сигнала. Результат измерения перемещения фиксируется в ячейке памяти компьютера как сумма целого значения периодов интерференционных полос и дробной части интерференционной полосы. Результат измерения перемещения из начального положения в конечное положение вычисляется как разность значений конечной и начальной фаз интерференционного сигнала. Для получения результата перемещения, представленного в метрической системе единиц, компьютер умножает разность значений фаз интерференционного сигнала на значение половины длины волны излучения полупроводникового лазера.
Работоспособность предлагаемого устройства и его высокие метрологические характеристики экспериментально подтверждены в Институте автоматики и электрометрии СО РАН.
Испытания действующего макета устройства в режиме измерения дальности показали, что при использовании полупроводникового лазера ADL-65102TL фирмы Arima он устойчиво работал в диапазоне дальностей 0.20-15 метров. Погрешность измерения дальности составила 1.5 мм.
Измерения величины перемещения рассеивающего объекта показали, что при частоте модуляции 25 кГц среднеквадратическая ошибка измерения перемещений не превышала 8 нанометров, а максимальная скорость перемещения составляла 30 мм/с.
Источники информации
1. В.П.Коронкевич, B.C.Соболев, Ю.Н.Дубнищев. Лазерная интерферометрия. Наука, Сибирское отделение, Новосибирск, 1983.
2. Лазерные интерферометры. Новосибирск: ИАиЭ СО АН СССР, 1978.
3. Патент США №4715706, выданный 29.12.1986. МКИ G01C 3/08.
4. Лазерные измерители скорости и длины. Датчики и Системы, 2003, №7.
5. Патент США №5483332, выданный 10.04.1995. G01S 17/58, G01P 5/00.
6. Патент США №5552879, выданный 04.08.1994. G01P 3/36, G01S 17/00.
7. Т.Дюрани, К.Грейтид. Лазерные системы в гидродинамических измерениях. Plenum Press. New York, 1977. Перевод на русский язык. Энергия, 1980.
8. Silvano Donati, Giliani and Sabina Merlo. Laser Diode Feedback Interferometer for Measurement of Displacements without Ambiguity. IEEE Journak of Quantum Electronics. Vol.31, NO. 1, January 1995.
9. Thierry Bosch, Noel Servagent, Flore Gouaux and Gregory Mourat. The self-mixing interference inside a laser diode: application to displacement, velocity and distance mesurement. SPIE. Vol.3478, JULY 1998.
10. Патент РФ №2144194, выданный 10.01.2000. G01P 3/36.
11. B.C.Соболев, A.M.Щербаченко, Г.А.Кащеева и др. Лазерная доплеровская система нового поколения как датчик скорости для автоматизации научного эксперимента и технологических процессов. Датчики и системы, 2000, №2.
12. Патент РФ №2177159, выданный 20.01.2001. G01P 5/26.
13. Ю.Н.Дубнищев. Лазерные доплеровские измерительные технологии. Новосибирск, Новосибирский государственный технический университет. 2002.
14. Патент США №7283214 В2, выданный 16.10.2007.
15. B.C.Соболев, Г.А.Кащеева. Интерферометрия с оптической обратной связью и частотной модуляцией. Автометрия, 2008, №6, с.49-65.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОГО РАССТОЯНИЯ | 2020 |
|
RU2738876C1 |
| СПОСОБ ОЦЕНКИ ВИБРАЦИОННЫХ ИЛИ АКУСТИЧЕСКИХ СИГНАЛОВ ВДОЛЬ ПРОТЯЖЕННЫХ ОБЪЕКТОВ НА БАЗЕ ВОЛОКОННО-ОПТИЧЕСКОГО КОГЕРЕНТНОГО РЕФЛЕКТОМЕТРА С АМПЛИТУДНОЙ И ФАЗОВОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩЕГО ИЗЛУЧЕНИЯ | 2016 |
|
RU2624594C1 |
| Мессбауэровский спектрометр с лазерным интерферометром | 1987 |
|
SU1469405A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2015 |
|
RU2601530C1 |
| Лазерный судовой измеритель скорости | 2018 |
|
RU2689273C1 |
| Устройство определения степени и места возмущения зонной волоконно-оптической системы охраны объектов | 2022 |
|
RU2836460C2 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2004 |
|
RU2288449C2 |
| СПОСОБ ЧАСТОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ ПОЛУПРОВОДНИКОВОГО ЛАЗЕРНОГО ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ДЛЯ ОПРОСА ОПТИЧЕСКИХ ИНТЕРФЕРОМЕТРИЧЕСКИХ ДАТЧИКОВ | 2016 |
|
RU2646420C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАНОПЕРЕМЕЩЕНИЙ | 2017 |
|
RU2658112C1 |
Изобретение предназначено для бесконтактного измерения дальности до объекта и величины его перемещения. Измеритель содержит полупроводниковый лазер с фотоприемным устройством, оптически связанный через коллиматор с диффузно-отражающим объектом, модулятор тока лазера, блок термостабилизации лазера и электронный блок обработки интерференционного сигнала. Электронный блок обработки интерференционного сигнала фотодиода содержит операционное устройство, компаратор, формирователи синхроимпульса и строб-импульса, блок формирования трех импульсных сигналов, измерители длительности начальной фазы и периода интерференционного сигнала, а также компьютер, управляющий работой всего измерителя. Изобретение позволяет уменьшить погрешность измерений. 2 ил.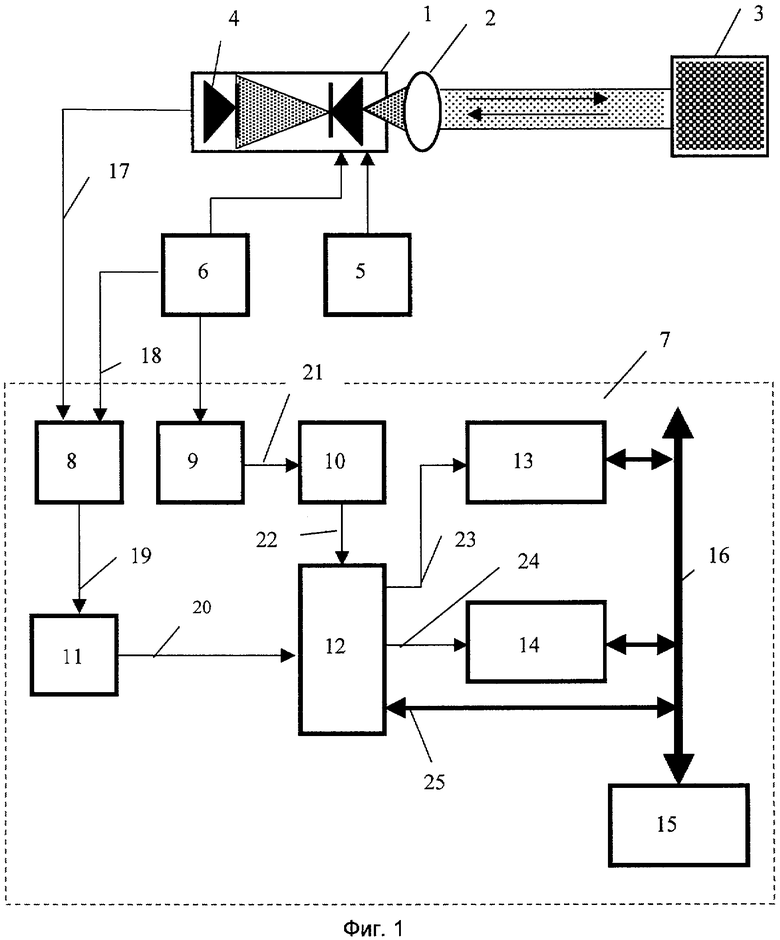
Лазерный измеритель дальности и перемещений, содержащий полупроводниковый лазер с встроенным фотодиодом, коллиматор, модулятор тока полупроводникового лазера, блок термостабилизации тока лазера и электронный блок обработки интерференционного сигнала фотодиода, отличающийся тем, что электронный блок содержит операционное устройство, к неинвертирующему входу которого подключен выход фотодиода, а инвертирующий вход соединен с первым дополнительным выходом модулятора, ко второму дополнительному выходу которого последовательно соединены формирователи синхроимпульса и строб-импульса, к выходу операционного устройства последовательно подключены компаратор и первый вход блока формирования трех импульсных сигналов, со вторым входом которого соединен выход формирователя строб-импульса, первый и второй выходы упомянутого блока формирования соединены соответственно с измерителями длительностей начальной фазы и периода интерференционного сигнала, а выходы указанных измерителей и третий выход формирователя трех импульсных сигналов соединены с шиной компьютера.
| US 7283214 В2, 16.10.2007 | |||
| Устройство для измерения дальности и скорости объектов | 1989 |
|
SU1661572A1 |
| Способ изготовления тонких асферических менисков | 1942 |
|
SU71762A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 4715706 A, 29.12.1987 | |||
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ | 1998 |
|
RU2144194C1 |
| СЛЕДЯЩИЙ ФИЛЬТР-ПРОЦЕССОР ДЛЯ ОБРАБОТКИ СИГНАЛОВ ЛАЗЕРНОГО ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2000 |
|
RU2177159C1 |

