1
Изобретение относится к измерительной технике и может быть использовано для дистанционного измерения статических и динамических усилий, давлений.
, Целью изобретения является повыше ние точности путем снижения динами- |ческой погрешности при измерении перменных во времени усилий.
На чертеже представлена функциональная блок-схема предлагаемого устройства.
Намагничивающая обмотка 1 магнито упругого датчика 2 подключена к ис- точнику 3 питания. Дифференциально включенные измерительные обмотки 4 и 5 датчика 2 соединены с включенными последовательно амплитудным детектором 6, модулятором 7 и регистратором 8. К измерительным обмоткам датчика 2 подключен также вход фазового детектора 9, второй вход которого подключен к выходу источника 10 опорного напряжения, а выход через умножитель 11 соединен с управляющим входо модулятора 7. Устройство работает следующим образом.
При измерении усилия, равного нулю, ЭДС индуктируемые потоком намагничивающей обмотки 1 датчика 2 в его дифференциально включенных измерительных обмотках 4 и 5 равны по величине , Выходное напряжение устрой
ства, постуйающее на регистратор 8, равно нулю.
При воздействии на датчик давле- ния или усилия, изменяющегося во времени, в его магнитопроводе возника- ет перераспределение магнитного потока, вследствие чего ЭДС измерительных обмоток получают приращения противоположного знака. Разностный сигнал измерительных обмоток после вьще- ления с помощью амплитудного детектора 6 огибающей модулированного колебания имеет вид
l,(t) (t)(1+0,5f2), (1) где К
1
IV .
X .
коэффициент, определяемый свойствами материала магни топровода и конструктивными параметрами датчика;. коэффициент, определяемый конструкцией датчика; стабилизированная амплитуда тока намагничивающей обмотки;
W - стабилизированная угловая
частота тока намагничивающе обмотки; P(t) - измеряемое усилие;
I/ - сдвиг фазы выходного сигнала магнитоупругого датчика относительно фазы сигнала источника 10 опорного напряжения.
1 J dP/dt wP(t)
В выражении (1) динамическая погрешность определится члейом с/.
Фазовый детектор 9, сравнивающий фазы опорного напряжения источника 10 и выходного сигнала магнитоупругого датчика 2, формирует постоянное напряжение, пропорциональное сдвигу фаз между сравниваемыми сигналами, не зависящее от их амплитуд
ТТ - If 3 (2)
где KO - коэффициент пропорциональности.
Напряжение Ug возводится в квадрат с помощью аналогового умножителя 11, после чего подается на управляющий вход модулятора 7, на сигнальный вход которого подано напряжение (1). Напряжение на управляющем входе модулятора имеет види.
K,U| К,К
%
(3)
где К ч, - коэффициент усиления умножителя 11..
Коэффициент передачи К„ модулятом
ра 7 описывается выражением
(4)
1+к„и.,
где Кп - коэффициент пропорциональности, зависящий от характеристик элементов модулято- . ра 7.
Выходной сигнал устройства, поступающий на регистратор 8 с выхода модулятора 7, определяется выражением:
55
ш IIM W
(5)
которое с учетом (1) и (4) имеет вид Uet,,K,(t)(HO,5/2)j
1
i.(6)
В устройстве обеспечено выполнение условия ,jK 0,5 (7), что позволяет исключить динамическую погрешность Ugj,j (t) (8).
При измерении статических усилий сдвиг фаз If, а, следовательно, и вьг- ходное напряжение фазового детектора 4 равны нулю. При этом К 1.
Формула изобретения
Магнитоупругий измеритель, содержащий датчик, намагничивающая обмотка которого подключена к источнику питания, а измерительные обмотки соединены с амплитудным детектором, источник опорного напряжения и регистратор, отличающийся тем, что, с целью повышения точности путем снижения динамической погрешности при измерении переменных во времени усилий, измеритель снабжен последовательно соединенными фазовым де тектором, умножителем и модулятором, при этом выход умножителя соединен с
управляющим входом модулятора, первый вход фазового детектора соединен с измерительными обмотками датчика и с входом амплитудного детектора, а второй вход - с выходом источника
опорного напряжения, второй вход модулятора соединен с выходом амплитудного детектора, а его выход - с входом регистратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения усилия | 1986 |
|
SU1384969A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| ИЗМЕРИТЕЛЬ РАССТРОЙКИ СВЧ-РЕЗОНАТОРА | 1991 |
|
RU2014623C1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Автоматический следящий компенсатор переменного тока | 1973 |
|
SU473964A1 |
| Измеритель электродвижущей силы Холла | 1981 |
|
SU1026100A2 |
| Измеритель параметров кварцевых резонаторов | 1978 |
|
SU742828A1 |
| Вектормерное устройство | 1976 |
|
SU729525A1 |
| Устройство для измерения магнитострикции образцов микронных толщин | 1983 |
|
SU1238011A1 |
Изобретение может быть использовано для измерения статических и динамических усилий, давлений. Цель изобретения - повышение точности измерений. Измеритель содержит обмотку 1, магнитоупругий датчик 2, источник 3 питания, измерительные обмотки 4 и 5, детектор 6, модулятор 7, регистратор 8, детектор 9, источник 10 опорного напряжения и умножитель 1-1 . Введение новых элементов и образование новых связей между элементами измерителя позволяет снизить динамичес кие погрешности при измерении переменных во времени усилий. 1 ил. (/) оо О5 ю со 05 05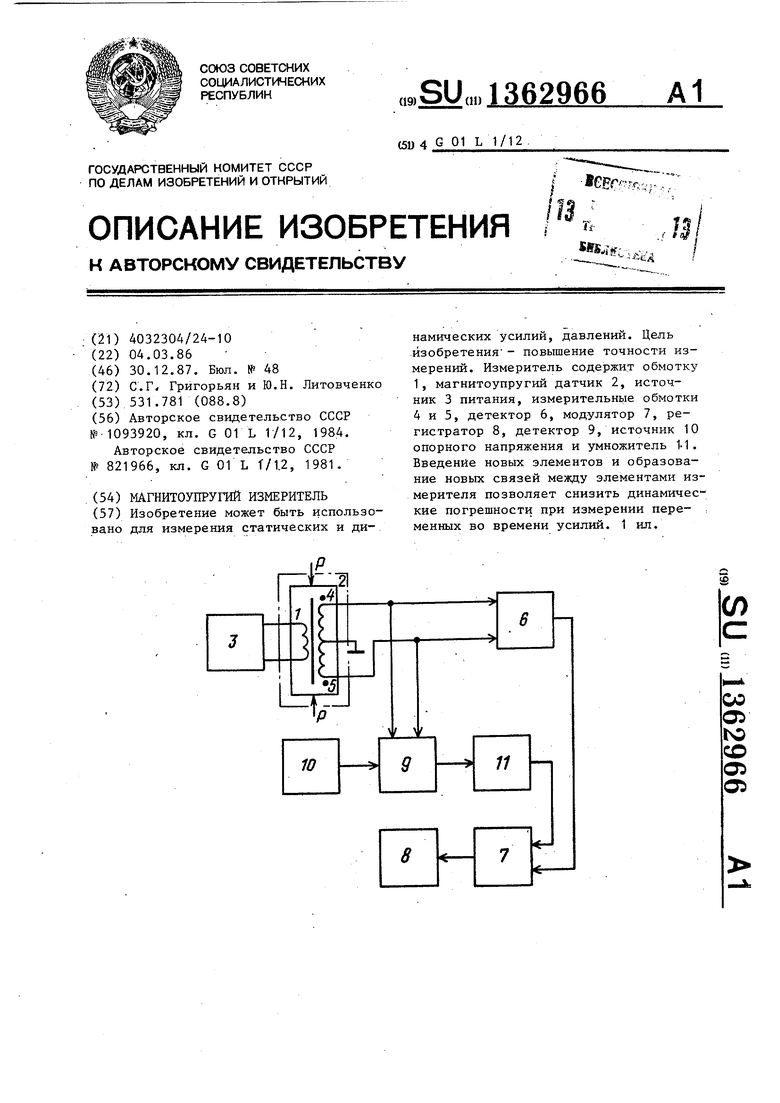
| Силоизмерительный датчик | 1982 |
|
SU1093920A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ уменьшения температурнойпОгРЕшНОСТи BECOB | 1979 |
|
SU821966A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
