Изобретение относится к балансироочной технике и может быть использоано при балансировке роторов, наприер типа диск, с относительно боль- , им коэффициентом снижения ( 10) дисаланса.
Цель изобретения - повышение прозводительности при балансировке партии роторов за счет сокращения време- ю ни коррекции дисбаланса во втором цикле и автоматизации процесса коррекции.
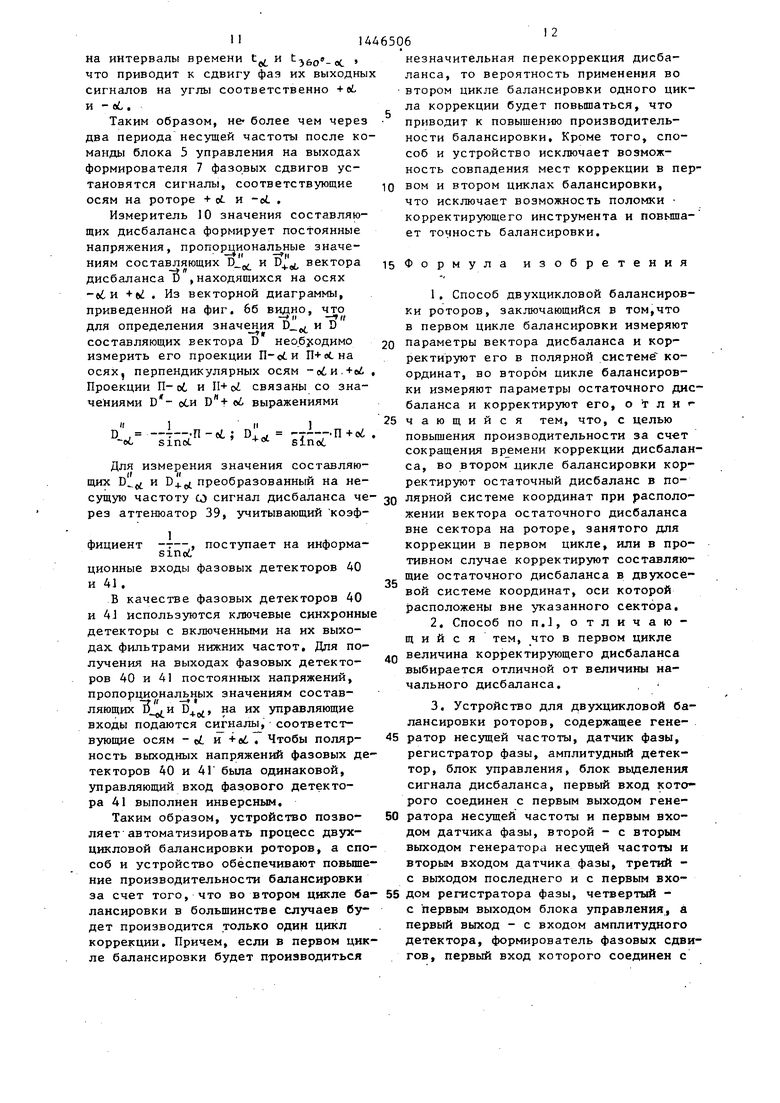
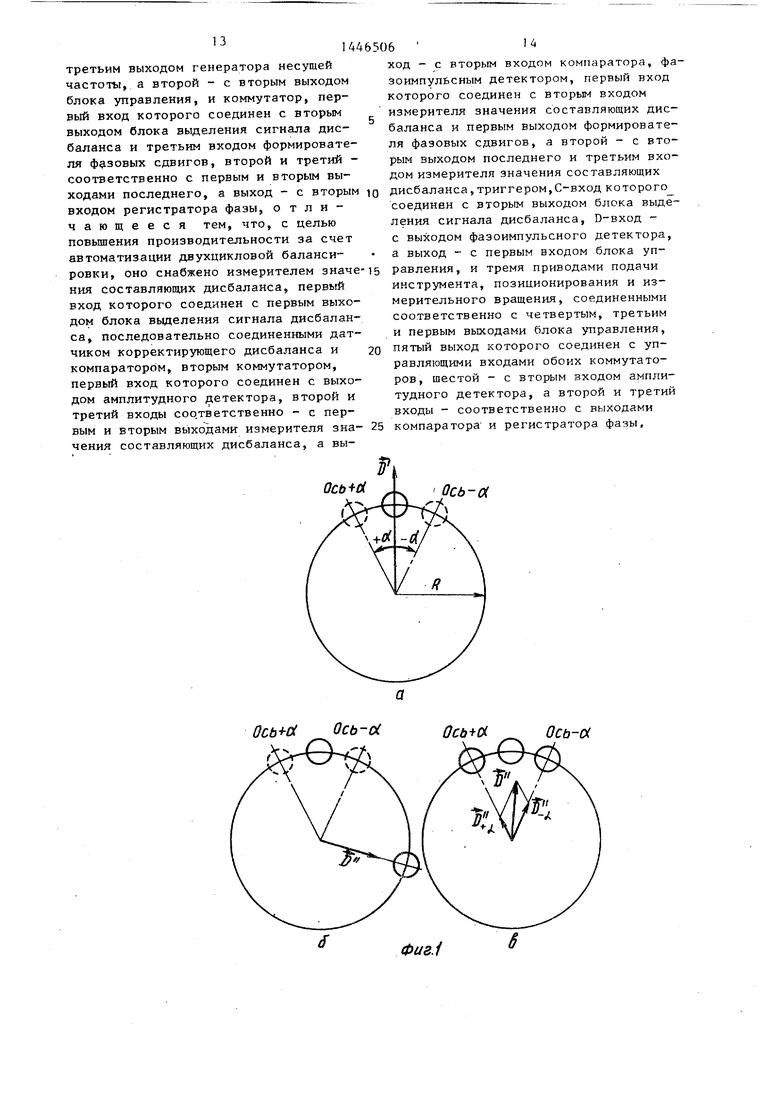
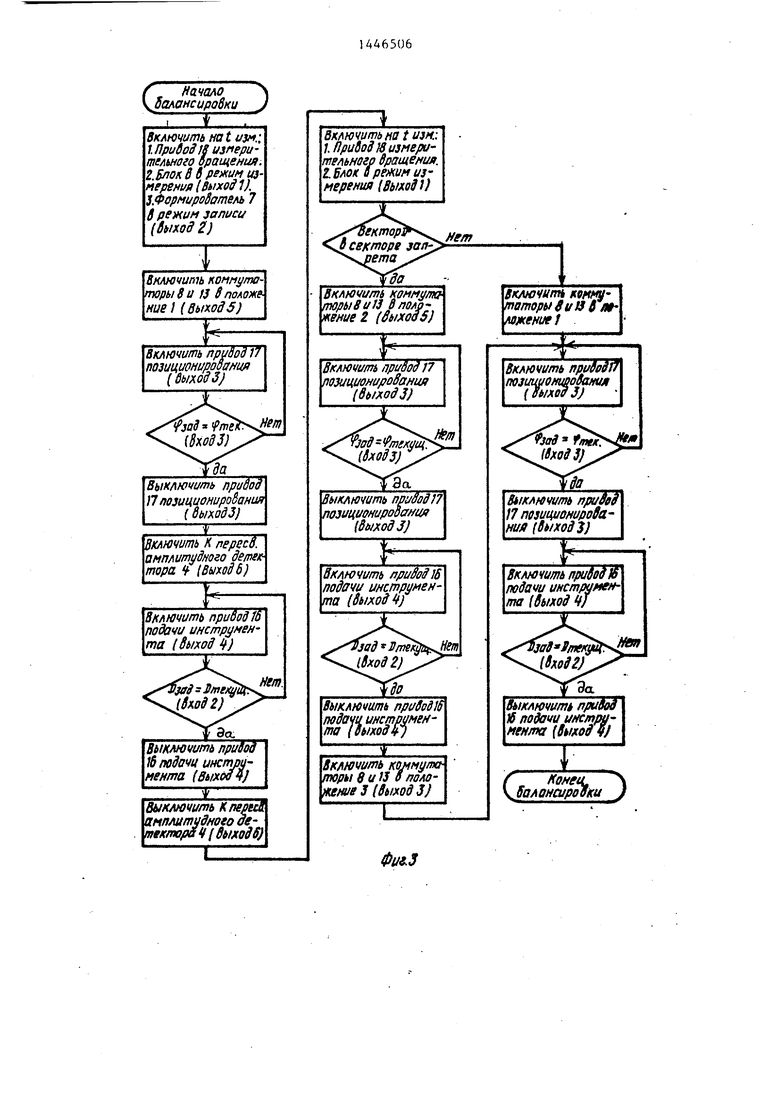
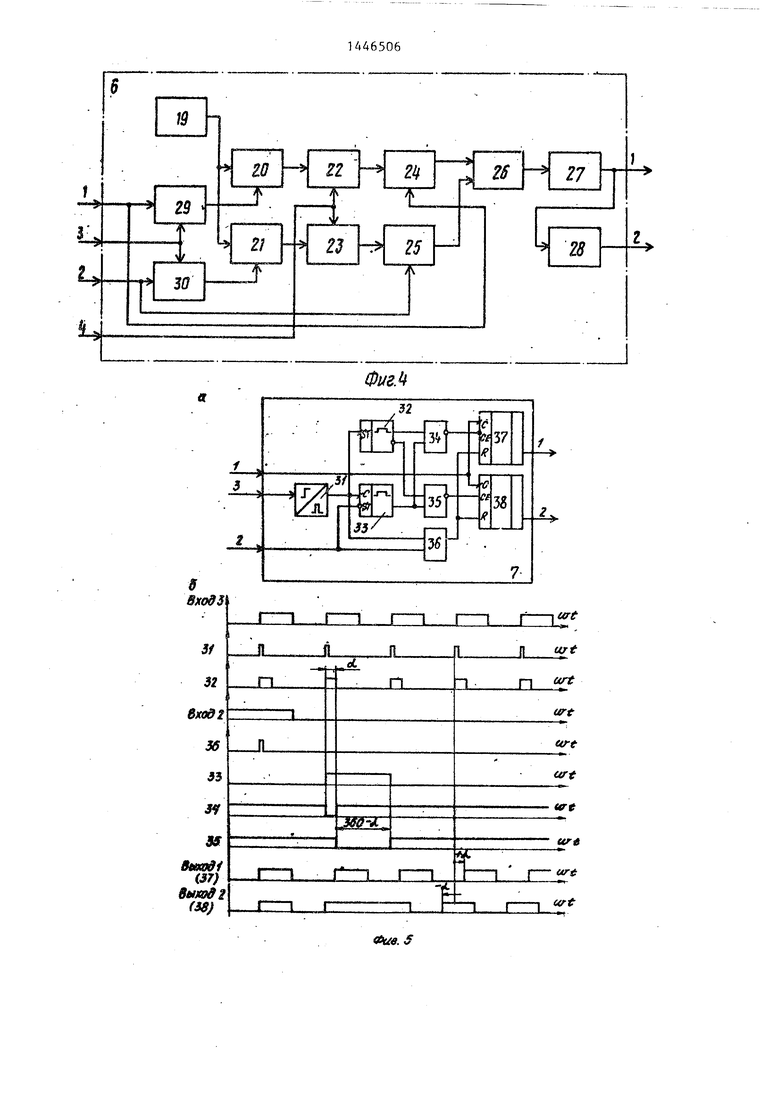
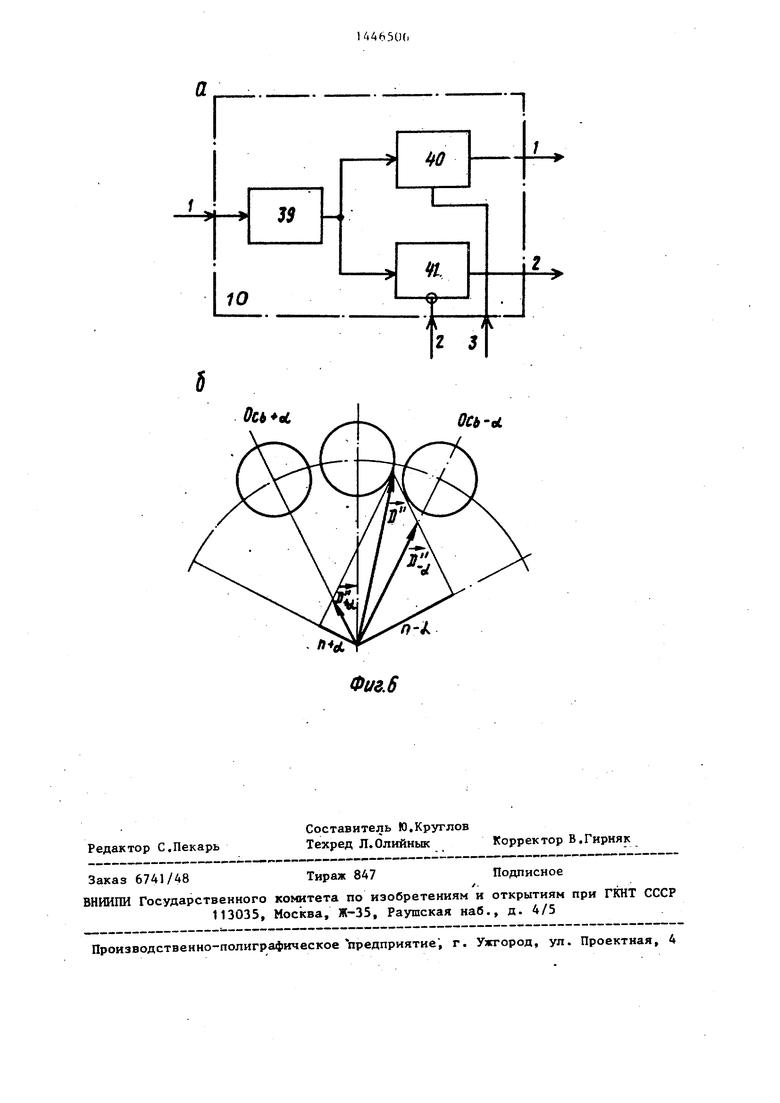
На фиг,1а-в изображены векторные диаграммы, поясняющие способ баланси-15 ровки; на фиг.2 - структурная схема устройства для осуществления способа; а- фиг.З - блок-схема алгоритма работы блока управления; на фиг.А - структурная схема блока выделения сигнала 20 исбаланса; на фиг.5а,б - соответственно структурная схема формирователя фазовых сдвигов и временные диаграммы, поясняющие его работу; на фиг.6а,б - соответственно структурная 25 схема измерителя значения составляющих дисбаланса и векторная диаграмма, поясняющая его работу. ,
На фиг. 1,6 обозначены D и I) - 30 векторы дисбаланса, измеренные соответственно в первом и втором цикле
- (Г /
балансировки; Си векторы сос- тавляющих дисбаланса; R - радиус ок- 1зужности, являющейся геометрическим „ местом точек на балансируемом роторе, используемых для коррекции; oL - угол между вектором дисбаланса в первом цикле балансировки и осью, проходящей через ближайшее место на роторе, решенное для коррекции во втором цикле балансировки, при этом значение угла uL определяется диаметром сверла и минимально разрешенной толщиной перемычки между отверстиями; ось oi д и ось +06 - лучи, образующие сектор запрета - сектор с центральным углом 2Q, запрещенный для коррекции во втором цикле балансировки. Осям + oL и - Л векторной диаграммы на фиг.66 соответствуют положительные перепады импульсов на временных диаграммах 37, 38 на фиг,56 (при вращении плоскости, в которой расположена векторная диаграмма, против часовой стрелки с частотой to) , Числа, стоящие у начала каждой из осей ординат временных диаграмм на фиг,56, указьшают номер элемента структурной схемы на фиг.5а.
50
55
5 0 5
0
Q 0
5
Способ двухцикловой балансировки заключается в том, что в первом цикле балансировки измеряют параметры дисбаланса и корректируют его в полярной системе координат, во втором цикле балансировки измеряют параметры остаточного дисбаланса и корректируют его в полярной системе координат при расположении вектора остаточного дисбаланса вне сектора, занятого для коррекции в первом цикле балансироя- ки, или в противном случае корректируют составляющие остаточного дисбаланса в двухосевой системе координат, оси которой расположены вне указанного сектора.
Для повьш1ения вероятности расположения- вектора остаточного дисбаланса вне сектора, занимаемого для коррекции в первом цикле балансировки, дисбаланс корректируют с коэффициентом, большим единицы, т.е. величина корректирующего дисбаланса выбирается отличной от величины начального дисбаланса ротора.
Устройство для реализации способа содержит генератор J несущей частоты, датчик 2 фазы, регистратор 3 фазы, амплитудный детектор 4, блок 5 управления, блок 6 вьщеления сигнала дисбаланса, первый вход которого соединен с первым выходом генератора 1 несущей частоты и первым входом датчика 2 фазы, рторой - с вторым выходом генератора 1 несущей частоты и вторым входом датчика 2 фазы, третий - с выходом последнего и с первым входом регистратора 3 фазы, четвертый - с первым выходом блока 5 управления, а первый выход - с входом амплитудного детектора 4, формирователь 7 фазовых сдвигов, первый и второй входы кото- рого соединены соответственно с третьим выходом генератора 1 несущей частоты и вторым выходом блока 5 управления, первый коммутатор 8, первый вход которого соединен с вторым выходом блока 6 выделения сигнала дисбаланса и третьим входом формирователя 7 фазовых сдвигов, второй и третий входьг - соответственно с первым и вторым выходами формирователя 7 фазовых сдвигов, а выход 9 - с вторым входом регистратора 3 фазы, измеритель 10 значения составляющих дисбаланса, первьй вход которого соединен с первым выходом блока 6 вьщеления сигнала дисбаланса, последовательно
3
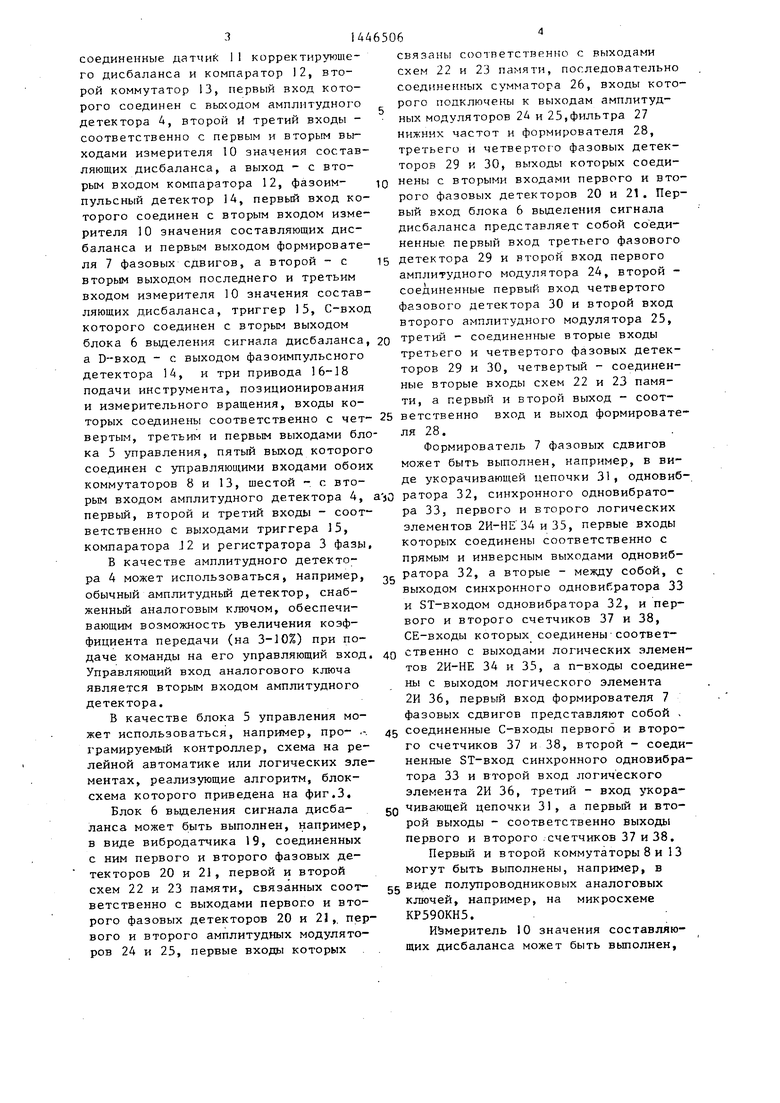
соединенные датчик I1 корректирующего дисбаланса и компаратор 12, второй коммутатор 13, первый вход которого соединен с выходом амплитудного детектора Д, второй и третий входы - соответственно с первым и вторым выходами измерителя 10 значения составляющих дисбаланса, а выход - с вторым входом компаратора 12, фазоим- пульсный детектор 14, первый вход которого соединен с вторым входом измерителя 10 значения составляющих дисбаланса и первым выходом формирователя 7 фазовых сдвигов, а второй с вторым выходом последнего и третьим входом измерителя 10 значения составляющих дисбаланса, триггер 15, С-вход которого соединен с вторым выходом
6506
связаны соответственно с выходами схем 22 и 23 памяти, последовательно соединеЕ1Ных сумматора 26, входы которого подключены к выходам амплитудных модуляторов 24 и 25,фильтра 27 нижних частот и формирователя 28, третьего и четвертого фазовых детекторов 29 и 30, выходы которых соеди1Q нены с вторыми входами первого и второго фазовых детекторов 20 и 21, Первый вход блока 6 выделения сигнала дисбаланса представляет собой соединенные первый вход третьего фазового
15 детектора 29 и второй вход первого амплитудного модулятора 24, второй - соединенные первый вход четвертого фазового детектора 30 и второй вход второго амплитудного модулятора 25,
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420418A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1167463A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1259118A1 |

блока 6 выделения сигнала дисбаланса, 20 третий - соединенные вторые входы
а В--вход - с выходом фазоимпульсного детектора 14, и три привода 16-J8 подачи инструмента, позиционирования и измерительного вращения, входы которых соединены соответственно с чет- 25 ветственно вертым, третьим и первым выходами бло- ля 28.
ка 5 управления, пятый выход которого Формирователь 7 фазовых сдвигов соединен с управляющими входами обоих коммутаторов 8 и 13, шестой - с втотретьего и четвертого фазовых детекторов 29 и 30, четвертый - соединенные вторые входы схем 22 и 23 памяти, а первый и второй выход - соотвход и выход формировате
может быть выполнен, например, в виде укорачивающей цепочки 31, одновиб
рым входом амплитудного детектора 4, a jO ратора 32, синхронного одновибратопервый, второй и третий входы - соответственно с выходами триггера J5, компаратора J2 и регистратора 3 фазы
В качестве амплитудного детектора 4 может использоваться, например, обычный амплитудный детектор, снабженный аналоговым ключом, обеспечивающим возможность увеличения коэффициента передачи (на 3-10%) при подаче команды на его управляющий вход Управляющий вход аналогового ключа является вторым входом амплитудного детектора.
В качестве блока 5 управления может использоваться, например, про- .. грамируемый контроллер, схема на релейной автоматике или логических элементах, реализующие алгоритм, блок- схема которого приведена на фиг.З.
Блок 6 выделения сигнала дисбаланса может быть выполнен, например, в виде вибродатчика 19, соединенных с ним первого и второго фазовых детекторов 20 и 21, первой и второй схем 22 и 23 памяти, связанных соответственно с выходами первого и второго фазовых детекторов 20 и 21,. первого и второго амплитудных модуляторов 24 и 25, первые входы которых
ветственно ля 28.
третьего и четвертого фазовых детекторов 29 и 30, четвертый - соединенные вторые входы схем 22 и 23 памяти, а первый и второй выход - соотвход и выход формировате Формирователь 7 фазовых сдвигов
может быть выполнен, например, в виде укорачивающей цепочки 31, одновибра 33, первого и второго логических элементов 2И-НЕ 34 и 33, первые входы которых соединены соответственно с прямым и инверсным выходами одновиб„ ратора 32, а вторые - между собой, с выходом синхронного одновиРратора 33 и ST-входом одновибратора 32, и первого и второго счетчиков 37 и 38, СЕ-входы которых соединены соответ40 ственно с выходами логических элементов 2И-НЕ 34 и 35, а п-входы соединены с выходом логического элемента 2И 36, первый вход формирователя 7 фазовых сдвигов представляют собой 45 соединенные С-входы первого и второго счетчиков 37 и 38, второй - соединенные ST-вход синхронного одновибратора 33 и второй вход логического элемента 2И 36, третий - вход укора5Q чивающей цепочки 31, а первый и второй выходы - соответственно выходы первого и второго .счетчиков 37 и 38.
Первый и второй коммутаторы 8 и 13 могут быть выполнены, например, в
gg виде полупроводниковых аналоговых ключей, например, на микросхеме КР590КН5.
Измеритель 10 значения составляющих дисбаланса может быть выполнен.
например, в виде аттенюатора 39 и пятого и шестого фазовых детекторов 40 и 41, первые входы которых соединены с выходом аттенюатора 39, первый вход измерителя 10 значения составляющих дисбаланса представляет собой вход аттенюатора 39, второй - второй вход первого фазового детектора 40, третий - второй вход второго фазового детектора 41, а первый и второй выходы - соответственно выходы первого и второго фазовых детекторов 40 и 41.
Датчик 1I корректирующего дисбалан са можно выполнить, например, в виде преобразователя линейное перемещение напряжение, кинематически связанного с корректирующим инструментом. Преобразователем линейное перемещение - напряжение может служить, например, переменный резистор, подключенный к источнику постоянного напряжения,
Фазоимпульсный детектор 14 может быть выполнен в вйде К8-триггера с динамическими R и S-входами,
Устройство обеспечивает работу станка-автомата или автоматической линии при двухцикловой балансировке роторов с коррекцией дисбаланса пу- тем устранения материала ротора. Устранение осуществляется сверлением балансируемого ротора в произвольных местах окружности одного радиуса R (фиг,1а-в),
Первый цикл балансировки (фиг,1а) состоит из цикла измерения и цикла коррекции в направлении, совпадающем с вектором дисбаланса б,
Второй цикл балансировки состоит из цикла измерения и одного цикла ко рекции в направлении, совпадающем с вектором дисбаланса D, если последНИИ находится вне сектора запрета (фиг.1б),
Если вектор дисбаланса D ся в пределах -сектора запрета (фиг,в), то его коррекция осуществляется по составляющим ,, В этом случае второй цикл балансировки содержит два цикла коррекции дисбаласа 15 ,
Устройство осуществляет способ следующим образом.
На первом выходе блока 5 управле- кия формируется команда,переключающая блок 6 вьщеления сигнала дисбаланса в режим измерения параметров дисбаланса и одновременно включающая
находит /
о
0 5
0
5
5
привод 18 измерительного вращения, кинематически связанный с балансируемым ротором (не показан) и ротором датчика 2 фазы,
Для работы блока 6 вьщеления сигнала дисбаланса на первый и второй его входы подаются ортогональные сигналы несущей частоты U) , а на третий вход - выходной сигнал датчика 2 фазы, В качестве датчика 2 фазы используется вращающийся трансформатор (или сельсин) в режиме фазовращателя. Режим фазовращателя обеспечивается питанием датчика фазы многофазными сигналами несущей частоты со , которая вырабатывает генератор 1 несущей частоты,
В режиме измерения блок 6 вьщеления сигнала дисбаланса осуществляет преобразование вибрации вращающегося с частотой $Z ротора в электрический сигнал, его фильтрацию от помех и перенос на несущую частоту CJ , В результате на первом выходе блока 6 вьщеления сигнала дисбаланса вьщеля- ется гармонический сигнал несущей частоты, амплитуда и фаза которого соответствуют значению и углу измерительного вектора дисбаланса.
На,втором выходе блока 6 выделения сигнала дисбаланса вьщеляются пря- моуголь ные импульсы типа меандр несущей частоть, положительные и отрицательные перепады которых совпадают во времени с положительными и отрицательными максимумами сигнала на первом выходе.
Через интервал времени t.,, достаточный для установления переходных процессов в блоке 6 вьщеления сигнала дисбаланса, блок 5 управлений устанавливает на своих первом и втором выходах низкие логические уровни. При этом выключается привод J8 измерительного вращения, а блок 6 выделения сигнала дисбаланса переключается в режим хранения, причем сигналы на его выходах сохраняются,
Одновременно формирователь 7 фазовых сдвигов переключается в режим динамического хранения фазы сигналов несущей частоты Q, соотв.етствующих осям ± oL .
Коммутаторы 8 и 13 устанавливаются блоком 5 управления в положение I (номер положения коммутаторов 8 и 13 соответствует порядковому номеру соединенного с выходом входа).
После этого на третьем выходе блока 5 управления формируется команда, включающая привод 17 позиционирования , Балансируемый ротор прииодится в медленное вращениеJ которое продолжается до тех пор, пока ось сверла корректирующей позиции не совпадет с направлением вектора дисбаланса D .
сдвигов во втором цикле балансировки остается в рожиме хранения фаз сигналов, соответствующих осям ioi ,
К концу второго цикла измерения на выходах блока 6 выделения сигнала устанавливак1тся сигналы, соответ дисбалансу D ,
Второй цикл коррекции дисбаланса При этом фазац) сигнала углового no-ig начинается с
ложения ротора, снимаемого с выхода датчика 2 фазы, совпадает с фазой Cf .дд , задаваемой выходным сигналом коммутатора 8, и регистратор 3 фазы подает на третий вход блока 5 управ- 15 ления соответствующую команду,Блок 5 управления выключает привод 17 позиционирования, а на шестом его выходе появляется команда, по которой выходное напряжение амплитудного детек- 20 тора 4 изменяется, например увеличивается, в ( выбирается равным 1,03-1,1). После этого на четвертом выходе блока 5 управления фороценки углового положе- и
ния вектора дисбаланса D относител но сектора запрета. Эту операцию выполняет триггер J5, тактируемый по С-входу положительными перепадами сигнала, соответствующими угловому положению вектора дисбаланса D. На D-вход триггера 15 поступают выходные импульсы фазоимпульсного детекто ра 14, положительные перепады которы соответствуют угловому положению оси + ci , отрицательные - оси -сС . Таким образом, если вектор D находится в секторе запрета, то триггер J5 фикси
1, если вне сек 0. Состояние
руется в состоянии
мируется команда, включающая привод 1625 тора, то в состоянии
подачи инструмента (сверла). Значение вносимого корректирующего дисбаланса определяется косвенно по глубине погружения в тело балансируемого ротора корректирующего инструмента, конт- 30 тавляет включенными коммутаторы 8
ролируемой датчиком 11 корректирующего дисбаланса. Когда текущее значение текиц корректирующего дисбаланса уравнивается со значением дисбаланса .,задаваемым выходным постоянным напряжением коммутатора 13, компаратор 12 формирует команду, воздействующую на четвертый вход блока 5 управления ,
Блок 5 управления соответственно подает команду на выключение привода 16 подачи инструмента, в результате чего сверлильная головка отводит- ся в исходное положение, Так как D А в раз больше D , то в первом цикле балансировки обеспечивается перекоррекция дисбаланса, что повышает вероятность того, что остаточный вектор окажется вне сектора запрета и второй цикл балан-- сировки будет содержать один цикл коррекции.
После этого блок-5 управления выключает . ц амплитудного детектора 4,
Второй цикл балансировки, начинается с цикла измерения, который проходит так же, как и в первом цикле балансировки. Формирователь 7 фазовых
сдвигов во втором цикле балансировки остается в рожиме хранения фаз сигналов, соответствующих осям ioi ,
К концу второго цикла измерения на выходах блока 6 выделения сигнала устанавливак1тся сигналы, соответ- дисбалансу D ,
Второй цикл коррекции дисбаланса начинается с
оценки углового положе- и
тора, то в состоянии
ния вектора дисбаланса D относительно сектора запрета. Эту операцию выполняет триггер J5, тактируемый по С-входу положительными перепадами сигнала, соответствующими угловому положению вектора дисбаланса D. На D-вход триггера 15 поступают выходные импульсы фазоимпульсного детектора 14, положительные перепады которых соответствуют угловому положению оси + ci , отрицательные - оси -сС . Таким образом, если вектор D находится в секторе запрета, то триггер J5 фикси 1, если вне сек- 0. Состояние
руется в состоянии
триггера 15 учитывается по первому- входу блоком 5 управления, и если оно равно нулю к началу второго цикла коррекции, то блок 5 управления сеи 13 в положении 1 и второй цикл коррекции проходит аналогично первому: после позиционирования ротора в положение, при котором ось сверлени совпадает с направлением вектора D , производится устранение материала ротора, соответствующее значение дисбаланса D (при этом перекоррекция не допускается) ,,
Если к началу второго цикла коррекции состояние триггера 15 устанавливается равным J, то блок 5 управления переключает коммутаторы 8 и 13 в положение II,При этом на вход регистратора 3 фазы в качестве опорного поступает сигнал, соответствующий оси -сС, а на вход компаратора 12 - выходное напряжение измерителя 10 значения составляющих дисбаланса, соответствующее значению составляющей D - oL. Блок 5 управления формирует команды, обеспечивающие позиционирование балансируемого ротора и коррекцию составляющей .
Затем блок 5 управления переключает коммутаторы 8 - J3 в положение III и проводится цикл коррекции составляющей и , аналогичный предыдущему.
14
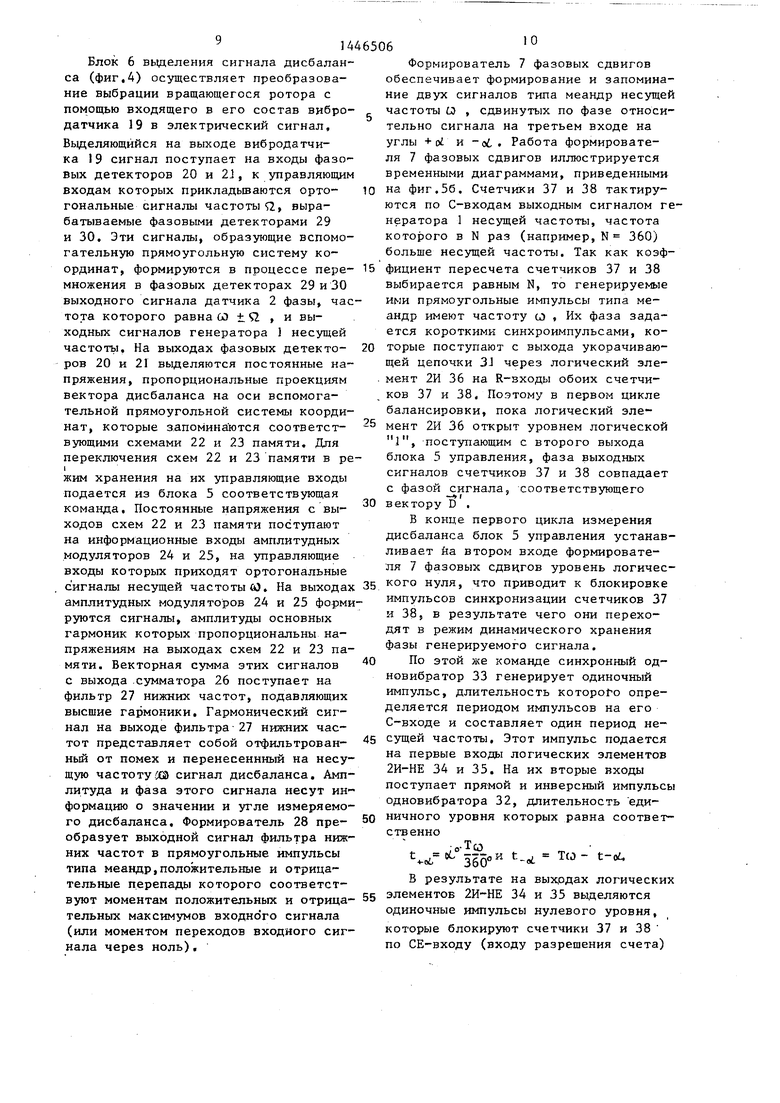
Блок 6 выделения сигнала дисбаланса (фиг,А) осуществляет преобразование выбрации вращающегося ротора с помощью входящего в его состав вибродатчика 19 в электрический сигнал.
Выделяющийся на выходе вибродатчика 19 сигнал поступает на входы фазовых детекторов 20 и 2J, к управляющим входам которых прикладьшаются ортогональные сигналы частоты Q, вырабатываемые фазовыми детекторами 29 и 30. Эти сигналы, образующие вспомогательную прямоугольную систему координат, формируются в процессе перемножения в фазовых детекторах 29 и 30 выходного сигнала датчика 2 фазы, частота которого равна СО t Q , и выходных сигналов генератора 1 несущей частоть. На выходах фазовых детекторов 20 и 21 выделяются постоянные напряжения, пропорциональные проекциям вектора дисбаланса на оси вспомогательной прямоугольной системы координат, которые запоминается соответствующими схемами 22 и 23 памяти. Для
переключения схем 22 и 23 памяти в ре
жим хранения на их управляющие входы подается из блока 5 соответствующая команда. Постоянные напряжения с выходов схем 22 и 23 памяти поступают на информационные входы амплитудных модуляторов 24 и 25, на управляющие входы которых приходят ортогональные Сигналы несущей частоты ft). На выхода амплитудных модуляторов 24 и 25 формруются сигналы, амплитуды основных гармоник которых пропорциональны напряжениям на выходах схем 22 и 23 памяти. Векторная сумма этих сигналов с выхода .сумматора 26 поступает на фильтр 27 нижних частот, подавляющих высшие гармоники. Гармонический сигнал на выходе фильтра 27 нижних частот представляет собой отфильтрован- ньш от помех и перенесеннный на несущую частоту,яа сигнал дисбаланса. Амплитуда и фаза этого сигнала несут информацию о значении и угле измеряемого дисбаланса. Формирователь 28 преобразует выходной сигнал фильтра нижних частот в прямоугольные импульсы типа меандр,положительные и отрицательные перепады которого соответствуют моментам положительных и отрицательных максимумов входного сигнала (или моментом переходов входного сигнала через ноль).
10
0
5
0
0
5 кого нуля,
Формирователь 7 фазовых сдвигов обеспечивает формирование и запоминание двух сигналов типа меандр несущей частоты Ц , сдвинутых по фазе относительно сигнала на третьем входе на углы + oL и -об. Работа формирователя 7 фазовых сдвигов иллюстрируется временными диаграммами, приведенными на фиг.56. Счетчики 37 и 38 тактируются по С-входам выходным сигналом генератора 1 несущей частоты, частота которого в N раз (например, N 360) больше несущей частоты. Так как коэффициент пересчета счетчиков 37 и 38 выбирается равным N, то генерируемые ими прямоугольные импульсы типа меандр имеют частоту оэ « Их фаза задается короткими синхроимпульсами, которые поступают с выхода укорачивающей цепочки 3J через логический эле- . мент 2И 36 на R-входы обоих счетчиков 37 и 38, Поэтому в первом цикле балансировки, пока логический эле
5 мент 2И 36 открыт уровнем логической 1, поступающим с второго выхода блока 5 управления, фаза выходных сигналов счетчиков 37 и 38 совпадает с фазой сигнала, соответствующего вектору D ,
В конце первого цикла измерения дисбаланса блок 5 управления устанавливает йа втором входе формирователя 7 фазовых сдвигов уровень логичесчто приводит к блокировке импульсов синхронизации счетчиков 37 и 38} в результате чего они переходят в режим динамического хранения фазы генерируемого сигнала.
По этой же команде синхронный од- новибратор 33 генерирует одиночный импульс, длительность кoтopo o определяется периодом импульсов на его С-входе и составляет один период не5 сущей частоты. Этот импульс подается на первые входы логических элементов 2И-НЕ 34 и 35, На их вторые входы поступает прямой и инверсный импульсы одновибратора 32, длительность единичного уровня которых равна соответственно
0
-ei.
TQ - t-oi.
кого нуля,
В результате на выходах логических элементов 2И-НЕ 34 и 35 вьщеляются одиночные импульсы нулевого уровня, которые блокируют счетчики 37 и 38 по СЕ-входу (входу разрешения счета)
11
V
Зйо -оС
на интервалы времени
что приводит к сдвигу фаз их выходны сигналов на углы соответственно + ei к - oL ,
Таким образом, не более чем через два периода несущей частоты после команды блока 5 управления на выходах формирователя 7 фазовых сдвигов установятся сигналы, соответствующие осям на роторе + oJ- и -oL ,
Измеритель 10 значения составляющих дисбаланса формирует постоянные напряжения, пропорциональные значениям составляющих D и D| вектора дисбаланса и ,находящихся на осях +6 , Из векторной диаграммы, приведенной на фиг. 66 видно, для определения значения D составляющих вектора D необходимо измерить его проекции П-о6и П+Лна осях, перпендикулярных осям .+с/. Проекции П-об и 11+oi связаны со значениями D - оСи 1)+ oi выражениями
что ; и D
1
sinoi.
D,-j-- U+oL
Для измерения значения составляющих D и Вц.д преобразованный на несущую частоту CJ сигнал дисбаланса через аттенюатор 39, учитывающий коэффициент -т-, sin л
поступает на информа- 40
35
40
45
ционные входы фазовых детекторов и 41 .
В качестве фазовых детекторов 40 и 4J используются к,пючевые синхронные детекторы с включеннь1ми на их выходах фильтрами нижних частот. Для получения на выходах фазовых детекторов 40 и 41 постоянных напряжений, пропорциональных значениям составляющих , на их управляющие входы подаются сигналы, соответствующие осям - et и +е(. Чтобы полярность выходных напряжений фазовых детекторов 40 и 4Г бьша одинаковой, управляющий вход фазового детектора 41 выполнен инверсным.
Таким образом, устройство позволяет автоматизировать процесс двухцикловой балансировки роторов, а способ и устройство обеспечивают повьше- ние производительности балансировки
за счет того, что во втором цикле ба- 55 дом регистратора фазы, лаисировки в большинстве случаев будет производится только один цикл коррекции. Причем, если в первом цикле балансировки будет производиться
50
ректируют остаточный д лярной системе координ жении вектора остаточн вне сектора на роторе, коррекции в первом ци тивном случае корректи щие остаточного дисбал вой системе координат, расположены вне указан
с первым выходом блока первый выход - с входо детектора, формировате гов, первый вход котор
6506
незначительная перекоррекция дисбаланса, то вероятность применения во втором цикле балансировки одного цикла коррекции будет повышаться, что приводит к повыщению производительности балансировки. Кроме того, способ и устройство исключает возможность совпадения мест коррекции в пер- 10 вон и втором циклах балансировки, что исключает возможность поломки корректирующего инструмента и повьппа- ет точность балансировки.
15Формула изобретения
0
5
0
5
5 дом регистратора фазы,
0
ректируют остаточный дисбаланс в полярной системе координат при расположении вектора остаточного дисбаланса вне сектора на роторе, занятого для коррекции в первом цикле, или в противном случае корректируют составляющие остаточного дисбаланса в двухосе- вой системе координат, оси которой расположены вне указанного сектора.
3
третьим выходом генератора несущей частоты, а второй - с вторым выходом блока управления, и коммутатор, первый вход которого соединен с вторым выходом блока выделения сигнала дисбаланса и третьим входом формирователя фазовых сдвигов, второй и третий - соответственно с первым и вторым выходами последнего, а выход - с вторым ю дисбаланса,триггером,С-вход которого
входом регистратора фазы, отличающееся тем, что, с целью повьшения производительности за счет автоматизации двухцикловой балансировки, оно снабжено измерителем значе ния составляющих дисбаланса, первый вход которого соединен с первым выходом блока выделения сигнала дисбаланса, последовательно соединенными датчиком корректирующего дисбаланса и компаратором, вторьгм коммутатором, первый вход которого соединен с выходом амплитудного детектора, второй и третий входы соо.тветственно - с первым и вторым выходами измерителя зна- 25 компаратора и регистратора фазы, чения составляющих дисбаланса, а выОсь Ш
Ocb+ti. Ocb-oL
е
6506
ход - с вторым входом компаратора, фа- зоимпульсным детектором, первый вход которого соединен с вторым входом измерителя значения составляющих дисбаланса и первым выходом формирователя фазовых сдвигов, а второй - с вторым выходом последнего и третьим входом измерителя значения составляющих
соединвн с вторым выходом блока выделения сигнала дисбаланса, D-вход - с выходом фазоимпульсного детектора, а выход - с первым входом блока управления, и тремя приводами подачи инструмента, позиционирования и измерительного Вращения, соединенными соответственно с четвертым, третьим и первым выходами блока управления, пятый выход которого соединен с управляющими входами обоих коммутаторов, шестой - с вторым входом амплитудного детектора, а второй и третий входы - соответственно с выходами
РСЬ-О(
Ось+а
Ось-а
Фиг.1
С Начало балансировки J
Вк/(ючить на t изн.: J. ПриВоЗ К измерительного ёращения. tБлoк и режии измерения (8btxo9n
Benmpl--. секторе ета
а
Включить KOMtit/ma- торыВиЗЗ бпом- кение 2 (выходб)
Включит, привод }7 позиционирования {вы}(одЗ}
(ho83)
да
Jem
выключить придадП позиционироданш) (дыходЗ)
IL
Включить npuMJS подачи инструмента (бымд }
Включить привода подачи инструмента (Stixoff )
нет.
Выключит при8од15 подачи инструмента (оымдч
ВкАНЗчить KQMMymt- торы 9иП о поло- )№на83 ЦымдЗ)
Выключить Кпема. амплитудного ое- laeKraopSt ( SbixodS) ,
ВКЛЮЧНПЛ MfWtt
таторы S V1} л мAOjKfHUfl
Включить прибодЛ позициомиообания (выхаЗЗ)
Нет
Вчключить npuSe) /7 позициониро8а- ния 6иходЗ)
Включить прибвдК подачи инстрдме - та (8btxod ffj
Hen
(fen
За
аланшрЛки j
Редактор С.Пекарь
Составитель Ю.Круглов
Техред Л.ОлийныкКорректор В.Гирняк
Заказ 6741/48
Тираж 847
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие , г. Ужгород, ул. Проектная, 4
Oct-d
Фиг. 6
Подписное
| Патент ФРГ № 2946581, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
