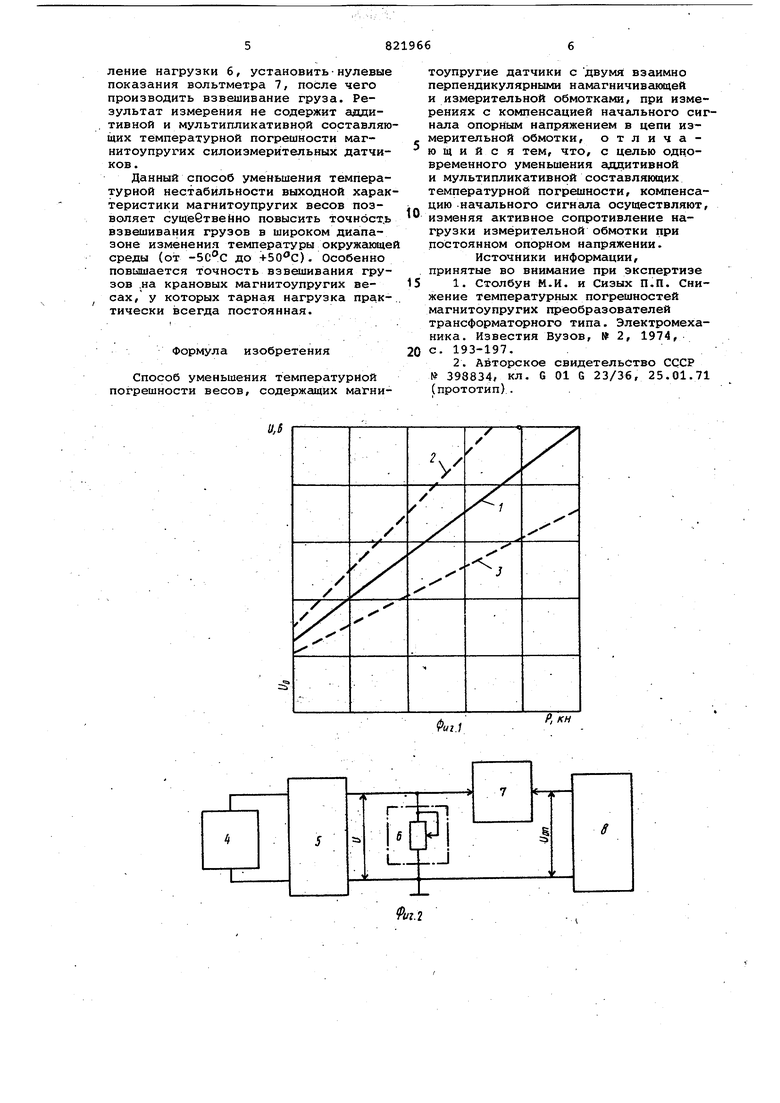
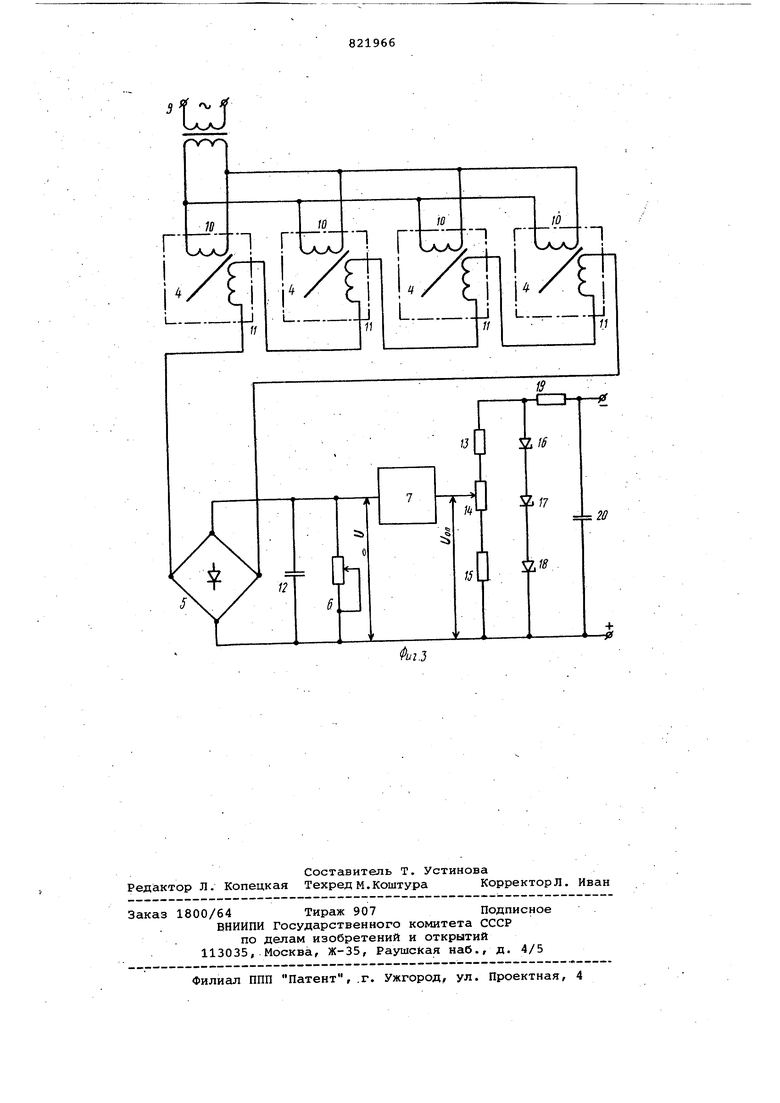
Изобретение относится к весоизме,рительной технике и может быть испол зовано в электромеханических весах с магнитоупругими силоизмерительными датчиками. Температурные .изменения выходных характеристик магнитоупругих силризмерительных датчиков являются основным источником погре1ьностей электромеханических весов, разрабатываемых на базе таких датчиков, причем известные конструкции магнитоупругих датчиков трансформаторного типа с шихтованным сердечником имеют темт пературную погрешность порядка. 11,7% на 10 С. При соответствующем коэффициенте заполнения, который представляет собой отношение толщины добавочных пластин из закаленной стали к общей толщине пластин магнитопровода из электротехнической стали, можно осуществить практически полную температурную компенсацию мультиплакативной составляющей магнитоупругого датчика трансформаторного типа, используя медное сопротивление, включенное в цепь выходной обмотки магнитоупругого датчика ll . Недостатком этого способа является то, что для его реализации в каждом конкретном случае необходимо подбирать величину активного проволочного сопротивления, исходя из величины температурного коэффициента магнитоупругого датчика, примененного в весах. Однако это довольно трудоемкая работа, требующая специального дорогостоящего оборудования (климатических камер, точных силоизмерительных машин и цифровых приборов). Другим недостатком этого способа является то, что аддитивная составляющая температурной погрешности магнитоупругого датчика не устраняется. Для уменьшения влияния этой составляющей погрешности перед измерениями необходима установка на нуль. Наиболее близким по технической сущности к изобретению является способ уменьшения температурной погрешности весов, содержащих, магнитоупругие датчики с двумя взаимно перпендикулярными намагничивающей и измерительной обмотками, при измерениях с компенсацией начального сигнала опорным напряжением в цепи измерительной обмотки 2 . Недостаток данного способа состоит в необходимости проведения при коррекции характеристики двух операций, последовательно растянутых друг за другом во времени. Это приводит к тому, что в процессе корректировки чувствительности по образцовой нагрузке дрейфуетнуль весов и требуется дополнительная установка нуля Другим недостатком данного спосора является то, что для его реализации нужно существенно усложнить конструкцию весов, вводя узел автоматической установки нуля, блок коррекции масштаба преобразования и механизм наложения образцовой силовой нагрузки на весовую платформу. Цель изобретения - одновременное уменьшение погрешности. Поставленная цель достигается тем что компенсацию начального сигнала осуществляют, изменяя активное сопротивление нагрузки измерительной обмотки при-постоянном опорном напряжении . На фиг. 1 показана зависимость вы ходного напряжения U магнитоупругих датчи7{ов от измеряемой силы Р,-приложенной к датчикам, при различной температуре окружающей среды; на фиг. 2 - структурная схема весов, по . яснякщая данный способ уменьшения температурной нестабильности выходной характеристики магнитоупругих весов, на фиг. 3 - принципиальная электриче кая схема магнитоупругих весов. На фиг. 1 обозначены: 1 - характеристика весов (P) при . 2 - характеристика при , 3 - характеристика при . На фиг. 2 и 3 показаны магнитоупр гий,датчик 4 трансформаторного типа с двумя взаимно перпендикулярными обмотками, служащий для преобразования измеряемой силы Р в пропорциональное напряжение U) выпрямительное устройство 5, преобразующее выходной сигнал переменного тока в сиг нал постоянного тока; подстраиваемая /активная нагрузка 6,определяющая рабочий трк датчика и масштаб преобраз вания; цифровой интегрирующий вольтметр 7, измеряющий разность потенциалов между выходным напряжением ма нитоупругого датчика и опорным напря жением; источник 8 регулируемого высокостабильного опорного напряжения, вырабатывающий стабильное опорное напряжение во времени} трансформатор 9, питающий силоизмерительные датчики/ намагничивающие обмотки 10 магнитоупругих датчиков, соединенные между собой параллельно; измерительные обмотки 11 датчиков, соединенные между, собой последовательно и Ьогласно емкость 12 фильтра; резис оры 13-15 делителя опорного напряже ния, прецизионные стабилитроны 16-18 стабилизатора опорного напряжения; балансный ограничительный резистор 19; емкость 20 фильтра стабилизатора опорного напряжения. Выходная характеристика магнитоупругих весов (P) существенно зависит от температуры магнитопроводов датчиков, а, следовательно, и от тем Пературы окружающей среды. С изменением температуры магнитопровода магнитоупругого датчика изменяется как угол наклона выходной характеристики (мультипликативная составляющая температурной погрешности), так и ее положение относительно оси ординат (аддитивная составляющая температурной погрешности). Экспериментально установлено, что такой, же характер смещения характеристики магнитоупругого датчика наблюдается при изменении величины активного сопротивления нагрузки в цепи выходной обмотки. Например, если магнитоупругий преобразователь предварительно поджат до линейного участка выходной характеристики, то увеличение активного сопротивления нагрузки всегда сопровождается увеличением чувствительности преобразователя и увеличением величины начального сигнала при отсутствии силовой нагрузки. Следовательно, смещение характеристики магнитоупругого датчика от воздействия температуры может быть скомпенсировано соответствующим изменением величины активного сопротивления нагрузки (если от температуры увеличились нулевой сигнал и чувствительность, то следует уменьшать нагрузку и наоборот.) . Способ уменьшения температурной погрешности весов, содержащих магнитоупругие датчики с двумя взаимно пер- . пендикулярными намагничивающей и измерительной обмотками, состоит в следующем. При градуировке весов образцовыми гирями определяется величина активного сопротивления нагрузки 6 магнитоупругих датчиков 4, которая в дальнейшем является постоянной для данной температуры. Этим самым получают рабочую выходную характеристику (P) магнитоупругих весов (при fCconst). Сразу же после градуировки весов изменения опорного напряжения и on уравновешивают начальное напряжение Uo выходной характеристики, т.е. добиваются нулевых показаний цифрового вольтметра 7 при отсутствии груза на весах, в дальнейшем изменять установленную величину опорного напряжения нельзя, так как это приводит к нарушению правильности градуировки весов. Непосредственно перед взвешиванием при уходе нуля и изменении чувствительности весов вследствие колебаний температуры окружающей среды необходимо, изменяя в ту или другую сторону активное сопротивление нагрузки 6, установитьнулевые показания вольтметра 7, после чего производить взвешивание груза. Результат измерения не содержит аддитивной и мультипликативной составляющих температурной погрешности магнитоупругих силоизмерйтельных датчиков .
Данный способ уменьшения температурной нестабильности выходной характеристики магнитоупругих весов позволяет сущеОтвейно повысить точнбст.ь взвешивания грузов в широком диапазоне изменения температуры окружающей среды (от -5С°С до ). Особенно повглшается точность взвешивания грузов ,на крановых магнитоупругих весах/ у которых тарная нагрузка практически всегда постоянная.
Формула изобретения
Способ уменьшения температурной погрешности весов, содержгицих магнитоупругие датчики с двумя взаимно перпендикулярными намагничивающей и измерительной обмотками, при измерениях с компенсацией начального сигнала опорным напряжением в цепи измерительной обмотки, отличающийся тем, что, с целью одновременного уменьшения аддитивной и мультипликативной составляющих температурной погрешности, компенсацию начального сигнала осуществляют,
0 изменяя активное сопротивление нагрузки измерительной обмотки при постоянном опорном напряжении.
Источники информации, принятые во внимание при экспертизе
5
1.Столбун М.И. и Сизых П.П. Снижение температурных погрешностей магнитоупругих преобразователей трансформаторного типа. Электромеханика. Известия Вузов, 2, 1974,
0 с. 193-197.
2.Авторское свидетельство СССР
398834, кл. G 01 G 23/36, 25.01.71 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения сил магнитоупругим преобразователем | 1984 |
|
SU1272129A2 |
| Способ измерения сил магнитоупругим преобразователем | 1984 |
|
SU1224619A2 |
| Способ измерения сил магнитоупругим преобразователем | 1988 |
|
SU1539546A1 |
| Устройство для измерения усилий | 1982 |
|
SU1091035A1 |
| Динамометр | 1977 |
|
SU690332A1 |
| Силоизмерительное устройство | 1981 |
|
SU998877A1 |
| ИНДУКТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2310813C2 |
| Магнитоупругое силоизмерительное устройство | 1988 |
|
SU1597615A1 |
| Способ измерения сил магнитоупругим преобразователем | 1987 |
|
SU1525487A2 |
| ВЕСОВОЙ ПЛОТНОМЕР | 2008 |
|
RU2381482C1 |
Р,кн
Фиг.
и
л
