11
Изобретение относится к электротехнике и предназначено для реверсивного управления асинхронным двигателями в системах прямого цифрового управления.
Цель изобретения - повышение быстродействия и расширение функциональных возможностей.
На фиг. 1 представлена схема элек тропривода; на фиг. 2 - временная диаграмма синхронизирующего сигнала; на фиг. 3 - диаграмма работы электропривода при положительной расстройке на фиг. 4 - то же, при отрицательной расстройке; на фиг. 5 - диаграмма работы электропривода при положительно расстройке; на фиг. 6 - то же, при отрицательной расстройке.
Электропривод переменного тока содержит двухфазный асинхронный электродвигатель 1 с обмоткой 2 управления и обмоткой 3 возбуждения, фазо- сдвигающий конденсатор 4, два диодных моста 5 и 6, два оптотиристора 7 и 8, блок 9 управления с пятью входами 10-14 и Двумя выходами 15 и 16, одни выводы обмоток 2 и 3 двухфазного асинхронного электродвигателя 1 объединены и предназначены для подключения одного провода питающей сети, между двумя другими выводами обмоток 2 и 3 включен фазосдвигающий конденсатор 4, одни выводы переменного тока первого и второго диодных мостов 5 и 6 подключены к разным выводам фазосдвигающего конденсатора 4 другие выводы переменного тока диодных мостов объединены и предназначены для подключения другого провода питающей сети, выходы диодных мостов 5 и 6 заюунтированы оптотиристо- рами 7 и 8, аноды светодиодов которых подключены к соответствующим выходам 15 и 16 блока 9 .управления, ка тоды светодиодов оптотиристоров 7 и 8 за.землены, блок управления составлен из логического элемента НЕ 17, трех логических элементов 2И 18-20, логического элемента 3 ИЛИ 21, логического элемента ИСКЛЮЧАЩЕЕ 2 ИЛИ 2 одновибратора 23, первый вход логического элемента 3 ИЛИ 21 и два входа первого логического элемента 2 И 18 образуют три первых входа 10-12 блока 9 управления, вход одновибратора 23 и один вход логического элемента ИСКЛЮЧАЮЩЕЕ 2 ИЛИ 22 образует соответственно четвертьй и пятый
f
0
25
g
45
30
35
40
50
входы 13 и 14 блока 9 управления, второй и третий входы логического элемента 3 ИЛИ 21 подключены соответственно к выходу первого логического элемента 2И 18 и ко входу одновибратора 23, выход которого подключен к другому входу логического элемента ИСКЛЮЧАЮЩЕЕ 2 ИЛИ 22, выход которого подключен ко входу логического элемента НЕ 17 и к одному входу второго логического элемента 2И 19, другой выход которого подключен к выходу логического элемента 3 ШШ 21 и к одному входу третьего логического элемента 2И 20, другой вход которого подключен к выходу Логического элемента НЕ 17, выходы второго и третьего логических элементов 2И 19 и 20 образуют соответственно первый и второй выходы 15 и 16 блока 9 управления, третий вход 14 которого предназначен для подключения источника синхронизирующего сигнала..
В таблице указано соответствие кодовых комбинаций логических сигналов на управляющих входах 10, 11, 13, 14 блока 9 управления режимами работы электропривода.
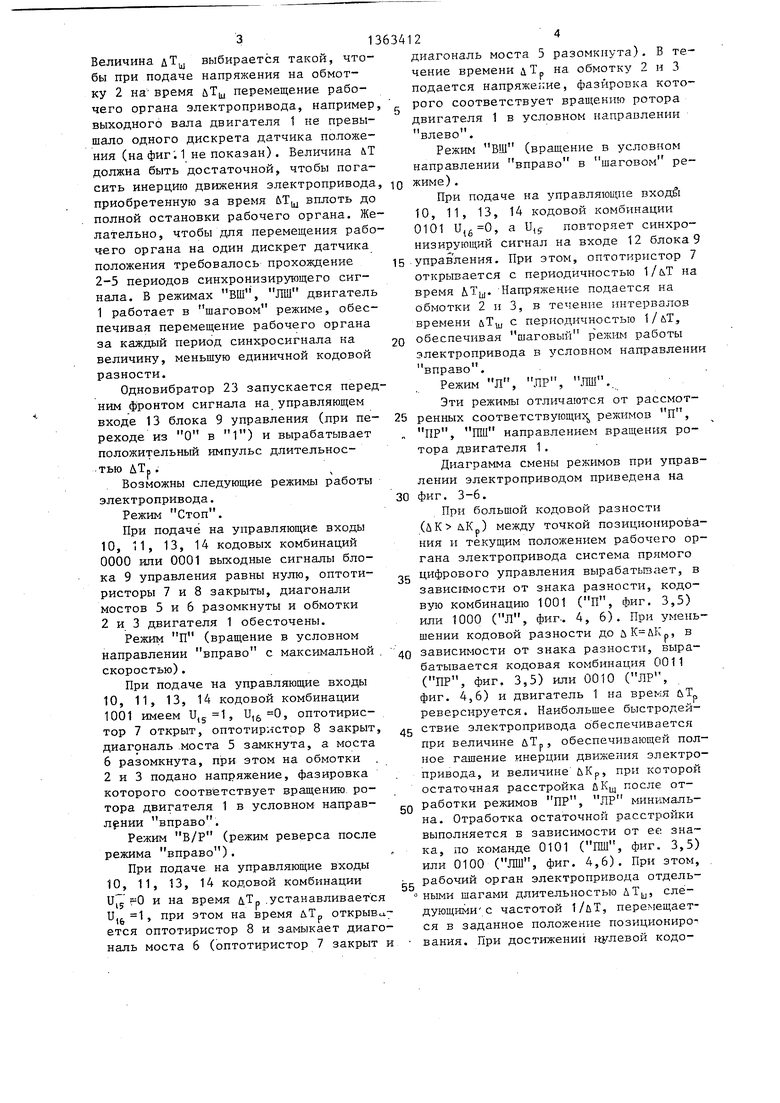
На фиг. 2 приняты следующие обозначения:
ЬТ - период синхронизирующего сиг- нала
длительность импульса синхронизирующего сигнала; длительность режима реверса ПР, ЛР (длительность импульса одновибратора); текущее время; величина кодовой.разности между положением позиционирования .и текущим положением рабочего электропривода ;
величина кодовой разности, при которой режимы П, Л изменяются на ПР, , величина кодовой разности, при которой режимы ПР, ЛР изменяются на ПШ, ЛШ.
йТщ йТ„ t
&к
АКр йКц, 45
55
Устройство работает следующим образом.
На вход блока. 9 управления подается синхронизирзтощий сигнал, представляющий последовательность прямоугольных импульсов длительности йТ и периодом следования дТ (фиг. 2).
диагональ моста 5 разомкнута), В т чение времени дТ- на обмотку 2 и 3
подается напряжение, фазировка кот рого соответствует вращению ротора двигателя 1 в условном направлении влево.
Режим ВШ (вращение в условном направлении вправо в шаговом р
Величина дТщ выбирается такой, чтобы при подаче напряжения на обмотку 2 НЕ время uTyj перемещение рабочего органа электропривода, например, выходного вала двигателя 1 не превышало одного дискрета датчика положения (на фиг .1 не показан). Величина &Т должна быть достаточной, чтобы погасить инерцию движения электропривода, IQ жиме).
приобретенную за время ЬТ вплоть до При подаче на управляющие полной остановки рабочего органа. Же- 10, 11, 13, 14 кодовой комбинации лательно, чтобы для перемещения рабочего органа на один дискрет датчика положения требовалось прохождение 2-5 периодов синхронизирующего CHI- нала. В режимах ВШ, ЛШ двигатель
1 работает в шаговом режиме, обеспечивая перемещение рабочего органа за каждый период синхросигнала на величину, меньшую единичной кодовой разности.
Одновибратор 23 запускается передним фронтом сигнала на управляющем
0101 U(, а и,5 повторяет синхро низирующий сигнал на входе 12 блок 15 управления. При этом, оптотиристор открывается с периодичностью 1/&Т н время АТц|. Напряжение подается на обмотки 2 и 3, в те гение гпгтервалов времени аТ с периодичностью 1/&Т, 20 обеспечивая шаговый режим работы электропривода в условном направлен вправо.
Режим Л, ЛР, ЛШ..
Эти режимы отличаются от рассмот
входе 13 блока 9 управления (лри пе- 25 ренных соответствующих, режимов П, реходе из О в 1) и вырабатывает
ПР, ПШ направлением вращения ротора двигателя 1.
положительный импульс длительностью ДТр .
Возможны следующие режимы работы электропривода.
Режим Стоп.
При подаче на управляющие входы 10, 11, 13, 14 кодовых комбинаций 0000 или 0001 выходные сигналы блока 9 управления равны нулю, оптоти- ристоры 7 и 8 закрыты, диагонали мостов 5 и 6 разомкнуты и обмотки 2 и 3 двигателя 1 обесточены.
Режим П (вращение в условном направлении вправо с максимальной скоростью).
При подаче на управляющие входы 10, 11, 13, 14 кодовой комбинации 1001 имеем U,, U, 0, оптотиристор 7 открыт, оптотирнстор 8 закрыт диагональ моста 5 замкнута, а моста 6 разомкнута, при этом на обмотки 2 и 3 подано напряжение, фазировка которого соответствует вращению ротора двигателя 1 в условном направ- лрнии вправо.
Режим В/Р (режим реверса после режима вправо).
При подаче на управляющие входы 10, 11, 13, 14 кодовой комбинации Uj5 гО и на время .устанавливаетс и, 1, при этом на время Д.Тр открыв ется оптотиристор 8 и замыкает диагналь моста 6 (оптотиристор 7 закрыт
диагональ моста 5 разомкнута), В течение времени дТ- на обмотку 2 и 3
подается напряжение, фазировка которого соответствует вращению ротора двигателя 1 в условном направлении влево.
Режим ВШ (вращение в условном направлении вправо в шаговом режиме).
При подаче на управляющие 10, 11, 13, 14 кодовой комбинации
0101 U(, а и,5 повторяет синхронизирующий сигнал на входе 12 блока 9 управления. При этом, оптотиристор 7 открывается с периодичностью 1/&Т на время АТц|. Напряжение подается на обмотки 2 и 3, в те гение гпгтервалов времени аТ с периодичностью 1/&Т, обеспечивая шаговый режим работы электропривода в условном направлении вправо.
Режим Л, ЛР, ЛШ..
Эти режимы отличаются от рассмотренных соответствующих, режимов П,
ПР, ПШ направлением вращения ротора двигателя 1.
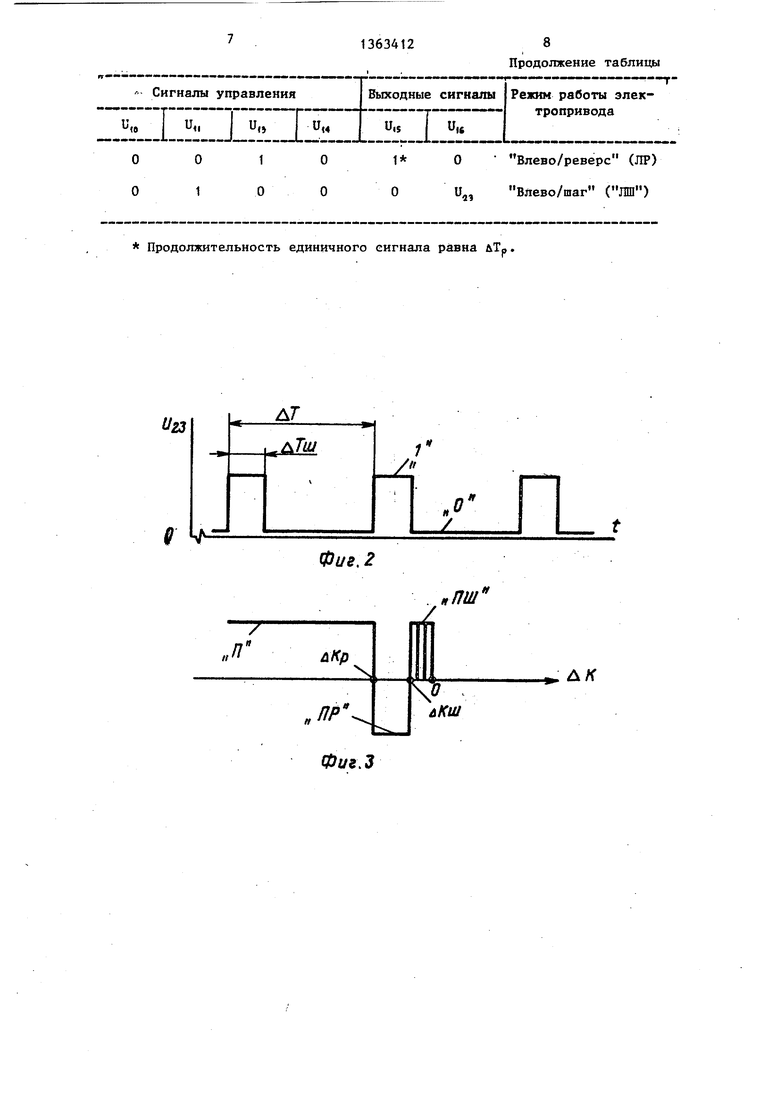
Диаграмма смены режимов при управлении электроприводом приведена на
фиг. 3-6.
При большой кодовой разности (.К ) между точкой позиционирования и текущим положением рабочего органа электропривода система прямого
цифрового управления вырабатьшает, в зависимости от знака разности, кодовую комбинацию 1001 (П, фиг. 3,5) или 1000 (Л, фиг.. 4, 6). При уменьшении кодовой разности до ., в
зависимости от знака разности, вырабатывается кодовая комбинация 0011 (ПР, фиг. 3,5) или 0010 (ЛР, фиг. 4,6) и двигатель 1 на время йТ реверсируется. Наибольшее быстродействие электропривода обеспечивается при величине лТ., обеспечивающей полное гашение инерции движения электропривода, и величине iKp, при которой остаточная расстройка йКщ после отработки режимов ПР, ЛР минимальна. Отработка остаточной расстройки выполняется в зависимости от ее знака, по команде 0101 (ПШ, фиг. 3,5) или 0100 (ЛШ, фиг. 4,6). При этом, .
абочий орган электропривода отдель
ными шагами длительностью AT|,j, слеующими с частотой 1/йТ, перемещаетя в заданное положение позициониро- ания. При достижении 1{улевой кодовой разности () вырабатывается любая из кодовых комбинаций 0000, (3001 (Стоп, фиг. 3-6) рабочий орган останавливается в заданном положении и процесс позиционирования заканчивается.
Таким образом, благодаря введению в блок управления электропривода соответствующих логических элементов и связей между ними повьшается быстродействие электропривода и обеспечивается возможность реализации шагового режима работы, что расширяет функциональные возможности электропривода.
Формула изобретения
Электропривод переменного тока, содержащий двухфазный асинхронный электродвигатель с обмотками управления и возбуждения, два диодных моста, два оптотиристора, фазосдвигаю- щий конденсатор, блок управления с пятью входами и двумя выходами, одни выводы обмоток двухфазного асинхронного электродвигателя объединены и предназначены для подключения одного провода питающей сети, между двумя другими вьюодами обмоток двухфазного асинхронного электродвигателя включен фазосдвигающий конденсатор, одни выводы переменного тока первого и второго диодных мостов подключены к разным выводам фазосдвигающего конденсатора, другие вьгооды переменного тока первого и второго диодньпс мостов объединены и предназначены для подключения другого провода питающей сети, выходы диодных мосО О 1 О О 1
О О О О 1 О
О О О 1 О О
О 1 1 1 1 О
363А12б
тов зашунтированы оптотиристорами, аноды светодиодов которых подключены к соответствующим выходам блока упg равления, катоды светодиодов опто- тиристоров заземлены, блок управления составлен из логического элемента НЕ, отличающийся тем, что, с целью повышения быстродействия и 10 расширения функциональных возможное- . тей, в блок управления введены три логических элемента 2 И, логический элемент 3 ИЛИ, логический элемент ИСКЛЮЧАЮЩЕЕ 2 РШИ, одновибратор, пер15 вый вход логического элемента 3 ИЛИ и два входа первого логического элемента 2 И образуют три первых входа блока управления, вход одновибратора и один вход логического элемента
20 ИСКЛЮЧАЩЕЕ 2 ИЛИ образуют соответственно четвертый и пятый входы блока управления, второй и третий входы по- гического элемента 3 ИЛИ подключены соответственно к выходу первого логи25 ческого элемента 2 И и к входу одно- вибратора, выход которого подключен к другому входу логического элемента ИСКЛЮЧАЩЕЕ 2 ИЛИ, выход которого подключен к входу логического элемента
30 НЕ и к одному входу второго логического элемента 2 И, другой вход которого подключен к выходу логического элемента 3 ИЛИ, а выход образует один выход блока управления, выход
25 логического э лемента НЕ подключен к одному входу третьего логического элемента 2 И, другой вход которого подключен к выходу логического элемента 3 ИЛИ, а выход образует другой
40 выход блока управления, третий вход которого предназначен для подключения источника синхронизирующего сигнала.
о Вправо (П)
1 Вправо-реверс (ПР)
0 Вправо/шаг (ГПП)
1 Влево (Л)
Сигналы управления
и„ J и„ J и„ и,4 u.s J u,e
О О
О 1
1 О
О О
Продолжительность единичного сигнала равна дТр,
tJ23
AT
u.s J u,e
Выходные сигналы
8 Продолжение таблицы
Режим работы электропривода
1 О Влево/реверс (ЛР)
О и„ Влево/шаг (ЛШ)
. Фив.
Фиг.5
ПШ
пЛШ
X
лш
.ЛР
Фиг. 5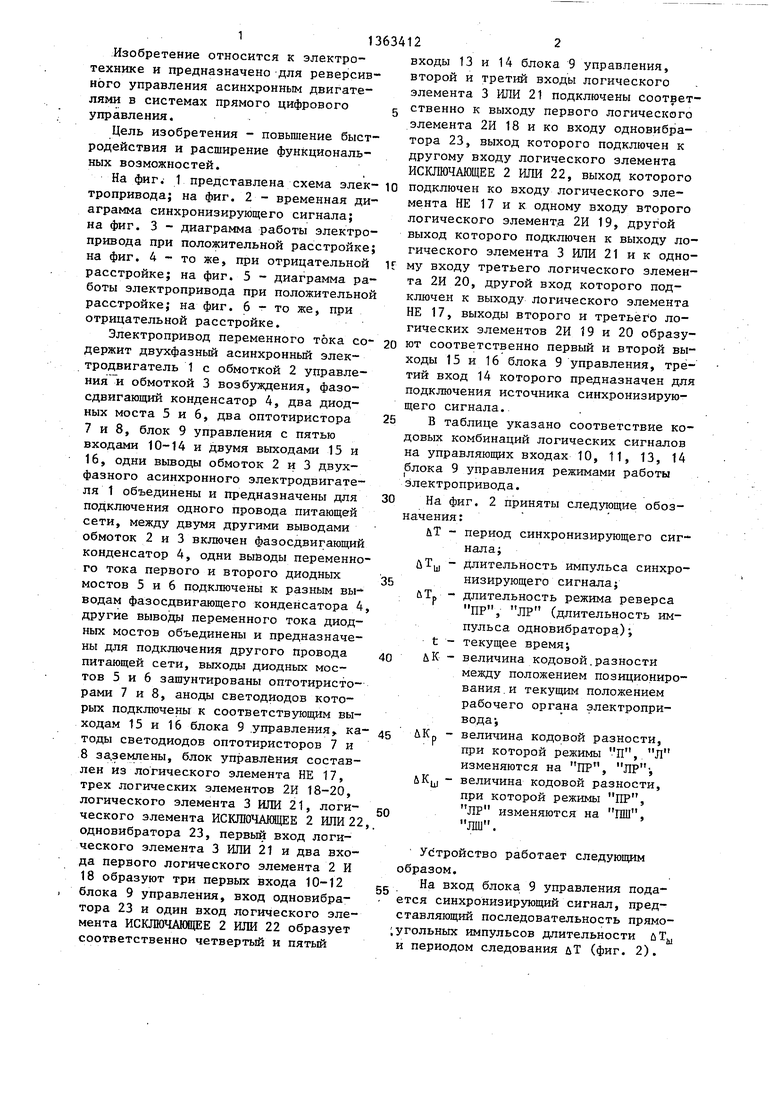

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления конденсаторным асинхронным электродвигателем | 1984 |
|
SU1246308A1 |
| Электропривод переменного тока | 1983 |
|
SU1135001A1 |
| Электропривод переменного тока | 1983 |
|
SU1142879A1 |
| Электропривод переменного тока | 1982 |
|
SU1117804A1 |
| Электропривод переменного тока | 1987 |
|
SU1517109A1 |
| Асинхронный электропривод | 1986 |
|
SU1436262A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2007 |
|
RU2342767C1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1990 |
|
SU1777225A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ ЭЛЕКТРОМАГНИТОМ | 1994 |
|
RU2096851C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОДНОФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2013 |
|
RU2542717C2 |

Изобретение относится к электротехнике и предназначено для реверсивного управления асинхронными двигателями в системах прямого цифрового управления. Цель изобретения - повышение быстродействия и расширение функцио-i нальных возможностей. Электропривод содержит двухфазный асинхронный электродвигатель 1 с обмотками 2, 3, -фа- зосдвигающий конденсатор, и два диодных моста 5, 6, оптотиристоры 7, 8 и блок 9 управления. ЯЬследний состоит из трех логических элементов 2И 18-20, логических элементов 3 ИЛИ 21 и НЕ 17, Исключающее 2 ИЛИ 22 и одно- вибратора 23. Четьфе входа блока 9 управления служат для подачи кодовой комбинации сигнала управления, пятый - для синхронизирующего сигнала. Электропривод обеспечивает три режима движения в каждом из направлений Вперед, Реверс, Шаг режим стоп и позиционирование в заданном положении. 6 ил., 1 табл. § (Л с гл з: : 4 о 
| Верман Н | |||
| и др | |||
| Реверсивный привод | |||
| Радио, 1979, № 11, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Электропривод переменного тока | 1982 |
|
SU1117804A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
