со
Од Од 00 00 ND
Изобретение относится к весоизмерительной технике и может быть использовано в устройствах, например, для определения веса движущихся объ ектов.
Цель изобретения - повьшение точности измерения.
Поставленная цель достигается тем, что согласно предлагаемому способу. измерения массы, основанному на прямых измерениях суммарной массы, состоящей из масс грузоизмерительной платформы и объекта с физически адекватной ей мерой Мд и без нее, при различных значениях коэффициента Кр передачи входного механического зве- . на фиксируют результаты измерений массы платформы с мерой - N , и нее - N, и N при значениях козффи- циента соответственно Кр, и Кр,, и Кр, , фик.сируют результаты измерений суммарной массы с мерой - N5- и Ng и без нее Ny и Ng при значениях коэффициента соответственно К-з и KTif и Кр4 и Крэ, находят разности А, N, -N, , -N5,A3 Nj-Ng , между адекватными результатами измерений, а массу М движущегося объекта находят (контролируют) пг формуле ,. u.u SzS -uiuj MO ,.ч
. X ТА , s; ) ( э)
где S,,82,5, и Зд - нормированные значения крутизны преобразования,приПри очевидной линейности передаточной характеристики входного механического звена, предполагаемой функциональности следующего за ним электрического звена и, таким образом, общей нелинейности всей передаточной характеристики механо-злектрического прямого разомкнутого измерительного преобразования передаточная функция может быть описана аналитическими моделями общего асимптотического вида
.Пг
Y-SH,(K)
°:fi.
и у. Ч
при приведении к выходу измерительного преобразования его абсолютной аддитивной погрешности Дм или же
Y-s«;(x±&,) (6)
при приведении к входу измерительного преобразования его абсолютной адди-а тивной погрешности Д„, где Y - выходной сигнал измерительного преобразования, характеризующий его результат, Зц, и SHU приведенные соответственно к входу и выходу нормированные значения крутизны преобразования передаточной характеристики, X - изме- рительньй сигнал, п., нормированное значение показателя нелинейности передаточной характеристики:
ЛХ.У.- й-х,
+ ux,L(t);
(7)
где д
KA)(M(t) - соответственно сис
стематйческая, коррелированная и случайная (некоррелированная) составля


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения величины переменного электрического тока | 1986 |
|
SU1396067A1 |
| Способ определения коэффициента пропускания средой волны электромагнитного излучения | 1983 |
|
SU1281986A1 |
| Способ измерения спектрального показателя поглощения | 1984 |
|
SU1518734A1 |
| Способ измерения электрических и неэлектрических величин | 1985 |
|
SU1269038A1 |
| Способ диагностирования измерительного преобразователя | 1987 |
|
SU1479901A1 |
| СПОСОБ ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2490756C2 |
| СПОСОБ УСИЛЕНИЯ И ДЕМОДУЛЯЦИИ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2599964C1 |
| СПОСОБ УСИЛЕНИЯ И ДЕМОДУЛЯЦИИ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2599347C1 |
| Устройство для измерения массы | 1975 |
|
SU523300A1 |
| СПОСОБ ДЕМОДУЛЯЦИИ И ФИЛЬТРАЦИИ ФАЗОМОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2486662C2 |

Изобретение относится к весоизмерительной технике. Цель изобретения - повышение точности измерения. Цель обеспечивается тем, что предложен способ, основанный на прямых измерениях суммарной массы, состоящей из масс грузоизмерительной платформы и объекта,с физически адекватной его мерой и без нее при различных значениях козффициента передачи входаого механического звена. 3 ил.
веденные к входу электрического функ-35 абсолютных приведенных погреш- ционального звена на квазилинейных участках соответственно Л,,Д,Д , и передаточной характеристики, сформированных изменениями коэффициента передачи отношения (Кр,/Кр2)и 40 () которых выбирают близкими к единице, но не равными ей, а массу
ностей.
С учетом соотношения (7) зависимости (5) и (6) преобразовьшаются (в конкретном случае предлагаемого способа) в выражения
N,-0 -S ,.« Кр,.4 (М„,.+М,;М„, ; М +М
1-8 ПЛ %) °iN,-8+uN,.8 (t,.s)5
)Л
о
(8)
(2)
М у определяют по формуле Л,Д 4 - м
к fU Г-Т, f Гй, - 1ТГ
при значительных превьщ1ениях массы платформы и объекта над мерой, обеспечивающих выполнения условий
S , Зг и S, S4 (3)
Затем фиксируют результаты N,, N3 и N при постоянном коэффициенте передачи, находят разности N3 и Nj-N,, а массу Му определяют с использованием зависимости
(4)
м м °
Предложенный способ измерения основывается на следующем.
абсолютных приведенных погреш-
ностей.
С учетом соотношения (7) зависимости (5) и (6) преобразовьшаются (в конкретном случае предлагаемого способа) в выражения
N,-0 -S ,.« Кр,.4 (М„,.+М,;М„, ; М +М
1-8 ПЛ %) °iN,-8+uN,.8 (t,.s)5
)Л
о
(8)
5
N,-8 S(.g ГКр,.4
+М„; Mj.)± iM
(Мпл +М, ;
М.
(9)
где N. g - аналоговая или же кодовая в том числе цифровая, форма результата прямого измерения;
S,.
0
а
р1-4
5
приведенные нормированные значения крутизны передаточной характеристики электрического звена; коэффициенты передачи входного механического звена, т.е. рычага, отношения которых характеризуются асимптотическим условием нормировки
(Кр, /Кр2. Kpi/Kp) 1,
(10)
31
где MQ соответственно массы грузоизмерительной платформы и меры; М суммарная масса, в ко- торой My - измеряемая, контролируемая масса движущегося груза, т.е объекта:
М М„,+ М, ,(11)
Первоначально устанавливают коэффициент Кр, передачи входного механического звена и фиксируют результат
,п„
(12)
N, S,KP, (Мпл +MO) iUN, +&N,(t,) , измерения массы платформы с мерой.
Затем слабо изменяют, в пределах соотношения (10) и на величину, кратную порогу чувствительности электрического звена, коэффициент передачи входного механического звена с Кр, до К „2 и этим формируют квази
линейную вариацию рабочей точки на нелинейной передаточной характеристике электрического звена, в пределах которой выполняется условие
|ЛПо1 ho -ll (13) Результаты измерений характеризуются следующими квазилинейными зависимостями:
N,-S,KP, (Мол+М,) N,+
+ I N,(O Nj-S, СКрг(Мп„+М ±
±tuN,+ uN,(t) Затем находят первую разность
(14) (15)
A,N,, (Кр,-Кр2)(Мп„+М,)±
,(t,) -ANjt) (16) между адекватными результатами измерений N4 и Nj.
Далее при коэффициенте Кр передачи входного механического звена фиксируют результат
N, ,,(M,,)4r.N,.U,(t)/
измерения платформы.
Затем слабо изменяют, в пределах соотношения (10) и на величину,кратную порогу чувствительности электрического звена, коэффициент передачи
входного механического звена с Кр2 до Кр, и этим формируют квазилинейную
Затем слабо изменяют, в пределах соотношения (10) и на величину, кратную порогу чувствительности электрического звена, коэффициент передачи входного механического звена с Кр до Крз и этим формируют квазилинейную
вариацию рабочей точки на нелинейной
передаточной характеристики электри- , ческого звена в пределах условия (13) вариацию рабочей точки на нелинейной и характеризуют результаты измерения следукицим квазилинейными зависимостями
передаточной характеристики электрического звена в пределах условия (13) и характеризуют результаты изN;
S,KPJ(M,J ± &N, 1
,(t)L
N. -sjKp, (Mn,), + + uN(t,),
Затем находят вторую разность
(18)
(19)
N;
(20)
U.,N4 -N,Sa(Kp,-Kp)M,, t
,(t)-lN,(t),
между адекватными результатами измерений N H,N.
Далее устанавливают коэффициент Крзпередачи входного механического звена и фиксируют результат
S,K, (, +
N.
)/
(21)
измерения суммарной массы с мерой.
Затем слабо изменяют, в пределах соотношения (10) и на величину, кратную порогу чувствительности электри- ческого звена, коэффициент передачи
входного механического звена с К-зДО Кр4 и этим формируют квазилинейную вариацию рабочей точки на нелинейной передаточной характеристики электрического звена в пределах условия (13) и характеризуют результаты измерений следующими квазилинейными за
висимостями:
N5-S,Kp.(M5+ Mj i bN5-H + iN,(t,)i
5
N
б- ) N,+
(22)
(23)
0
45 -РУ-- Р-У-
+SN,(g, Затем находят третью разность
й, N5-N6-S,(Kp,.-Kp)(Mj.-fM)±
,(t,)b,(t,),)
между адекватньми результатами измерений Nj. и Ng
Далее при коэффициенте Кр передачи входного механического звена фшс-РУ-- Р-У-
N/t)(25) измерения суммарной массы.
50
Затем слабо изменяют, в пределах соотношения (10) и на величину, кратную порогу чувствительности электрического звена, коэффициент передачи входного механического звена с Кр до Крз и этим формируют квазилинейную
, вариацию рабочей точки на нелинейной
вариацию рабочей точки на нелинейной
передаточной характеристики электрического звена в пределах условия (13) и характеризуют результаты из513668826
мерёний следующими квазилинейными за- д :N -N - S (К -Ко ) М + висимостями: ° (28)
(tg):-SN,(t) N7- 84 Кр4(М5-) NT+U NyCt)-, (26) между адекватными результатами изме. Ne S4CKp,(,-HuNg(t).(27) 5 рений N, и N..
о - у s:- - BS-I .. Далее определяют отношения разносЗатем находят четвертую разность
тей
Л,
N,-Ni .8,М„л + N,(tiJl i , s;(M;,)±r&N4(t4)-lN,(t3)
Ь N lN6 S M2iMs)tr| N tc}-i.N,
Л Mg-N, S(M2)(tg)-TN,(t,)
1-, .
которые преобразовьшают в зависимое- g ufi N2-N5 S Крз(Мо) .г
-b,(t,)l.
ти
М
пл
М
ПА
(-Й-: МоМ
(П1г:;
.
1)
(31)
(32)
Затем определяют отношение разностей
NilN M,J iN itjir-ibltjll (40 20 MO+CU Njt)- I N,(t,)l i . .- -которое преобразовьшают в результат
измерения (4) при следующих условиях нормировки случайных, некоррелиро- 25 ванных, составляющих абсолютных при- веденных погрешностей:
при следующих условиях нормировки случайных, некоррелированных, составляющих абсолютных приведенных погрешностей:
bN,.(ti)iNi( uN3(t3.)uN4(t,): SNf(t5)CuN6(t,) ; LbN7(t,)S N8(te) .
Затем решают зависимости (31) и (32) относительно массы М движущегося объекта и после элементарных
(33)
измерения (4) при следующих условиях нормировки случайных, некоррелиро- 25 ванных, составляющих абсолютных при- , веденных погрешностей:
iN,(t,)l - U,(t) и(41)
uN,(t,)l SN,(t,);
oU
коэффициенты корреляции которых равны.
При отсутствии искусственно введенных условий нормировки (33) и (41) прёобразов аний п одя к форму Ге (1) 35 Редлагаемый способ, как и ; известНа формулу (1) налагают условия ™ способы, относящиеся к косвенньм (3), что приводит к соотношению (2). методам измерении, обладают общим
- л.недостатком:, зависимостью результаДалее при любом коэффициенте пере- „ „
,,тов измерении от случайных, некорредачи механического звена, обеспечива- j , fi40 лированных, составляющих абсолютных
приведенных погрешностей единственным эффективным методом борьбы с которыми является статистическая обработка результатов многократных пряющем максимальную чувствительность метода (допустим при Кр), фиксируют результаты
N - (Мп,+М N+ u N(t,) ; 34)
,(M,,) N+uN3 t,) ; (35) 45 MbDC измерений , при которых эта
о 4составляющая погрешности уменьшается
, ( N+t N(t7)J7 в -{NT раз.На фиг. 1 изображена массоизмерительная система, состоящая из неподвижных 1 и 2 и подвижной 3 го- 50 ризонтальных платформы, грузоизмери- тельной из которых является платформа 3, по которым поступательно перемещается объект 4, воздействие массы. My которого передается через плат- 55 форму 3, имеющую массу М и систему рычагов 5 и 6, характеризующуюся коэффициентом Кр 1,/1 передачи на U5 N-;-N SKp3 (Mx) N(t7) С38) первичный измерительный преобразова- AN (t,)33тель (ПИП) 7, например пьезодатчик.
при линейной передаточной характеристике электрического звена, характеризующейся приведенным нормированным значением крутизны S и систематичес- . кой коррелированной составляющей абсолютной приведенной погрешности
IN 1N uN, AN7. 37) После чего находят разности
(28)
зметей
(29)
(30)
Затем определяют отношение разностей
NilN M,J iN itjir-ibltjll (40) MO+CU Njt)- I N,(t,)l i . .- -которое преобразовьшают в результат
измерения (4) при следующих условиях нормировки случайных, некоррелиро- ванных, составляющих абсолютных при- , веденных погрешностей:
iN,(t,)l - U,(t) и(41)
uN,(t,)l SN,(t,);
выходной аналоговый сигнал которого поступает через селективный усилитель 8 на вход специализированной микро-ЭВМ 9, состоящей из последовательно соединенных аналого-цифрового преобразователя (АЦП) 10, микропроцесора (МП) 11 с запоминающим устройством (ЗУ) и цифроаналогового преобразователя (ЦАП) 12, выходные анало- говые сигналы которого по команде микропроцессора (МП) 11 подаются на электромагнит 13, включение которого обеспечивает воздействие образцовой массы (М) 14 на систему рычагов 5 и 6, на оконечный индикатор 15, регистрирующий в цифровом визуальном виде результаты основных и промежуточных измерений, и на систему упоров 16 - 19 через исполнительный механизм 20 их вертикального перемещения с целью поэтапного формирования коэффициентов Кр передачи рычага 6, т.е. входного звена 6, характеризуемого линейной передаточной функцией, которая совместно с функциональным электрическим звеном 7-10 формирует общую нелинейную передаточную характеристику массоизмерительной системы, характеризуемую аналитической моделью (8) или (9).
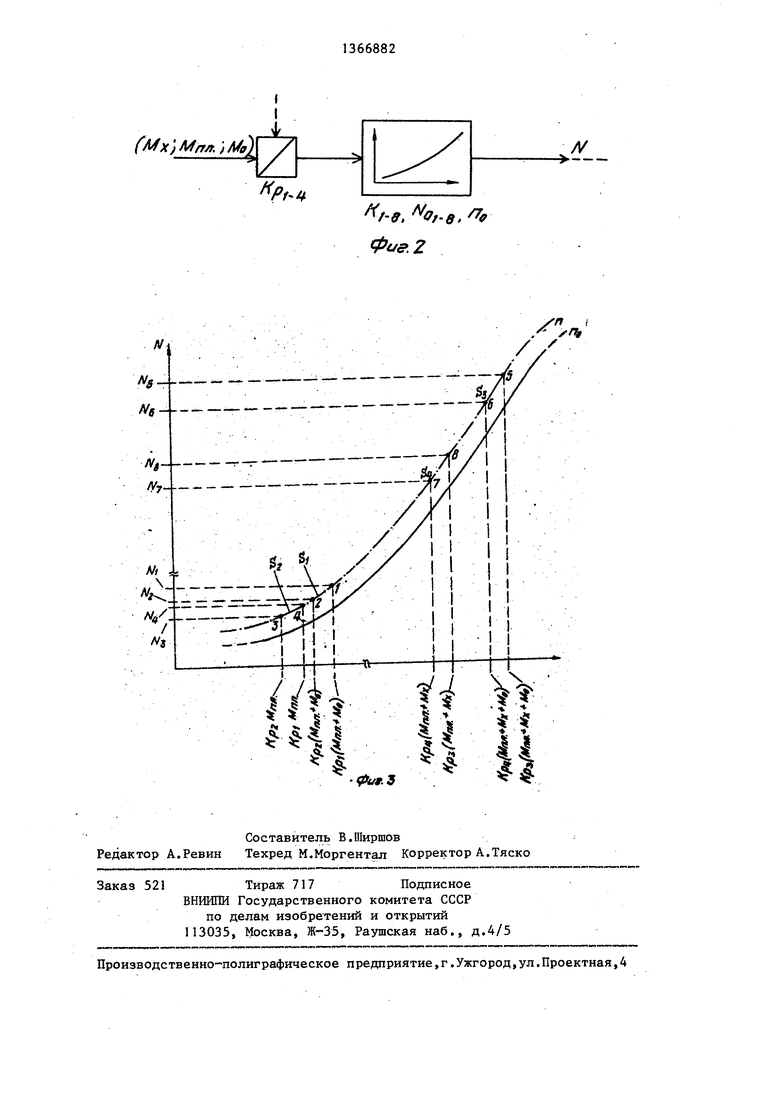
На фиг.2 изображена структурная схема массоизмерительной системы, на которой перестраиваемое входное механическое звено с коэффициентами Кр. передач последовательно соединено с функциональными устройством аналого-цифрового преобразования, в котором К,-д - значения коэффициента передачи электрического функциональ- ного звена, адекватные значениям крутизны его передаточной характеристики Si.g характеризуемой показателем п нелинейности; - аддитивные ошибки цифровых кодов N,Q, возника- ющие в процессе прямых измерений, различных комбинаций входных измерительных сигналов, формируемых адекватными комбинациями измеряемых масс М, и MO, воздействующих на входное механическое звено. Аналитическая модель структурной схемы соответствует соотношению (8).
На ((фиг.З изображены передаточная характеристика функционального элек- трического звена, т.е. аналого-цифрового преобразования (показанного на фиг.1 и 2), на которой Кр,-() ,
Кр2 (Мпл+М),
Кр2 М пл ,
Кр, М
ПА
и т.п. измерительные сигналы электрического звена, формируемые на выходе входного механического звена; S,, S, S,, Зд - значения крутизны передаточной характеристики на ее квазилинейных участках соответственно 1 - 2,3 - 4,5 - 6,7 - 8; N.g- результаты измерений, т.е. выходные сигналы электрического аналого-цифрового звена.
Пример осуществления предлагаемого способа на массоизмерительной системе, изображенной на фиг.1.
Первоначально вводят в запоминающее устройство (ЗУ) МП I1 микро-ЭВМ 9 общий алгоритм измерения движущегося объекта 4, нормированную передаточную характеристику (фиг.З); формулы (1) и (2) вычисления массы М,, движущегося объекта 4 (по результатам прямых измерений промежуточных вычислений).
Затем по команде микро- ЭВМ 9 с помощью исполнительного механизма 20 устанавливают упор 16 входного механического звена рычага 6 и включают электромагнит 13.
Затем .1При нахождении движущегося объекта 4 в позиции А на неподвижной платформе 1 фиксируют ЗУМП И результат измерения массы ( М) и с помощью микро-ЭВМ 9 вычисляют HOJMH- рованное значение крутизны S,-, передаточной характеристики (фиг.З), которое вводят в ЗУМП 11.
Далее по команде микро-ЭВМ 9 с помощью исполнительного механизма 20 устанавливают упор 17 рычага бис помощью исполнительного механизма 20 устраняют упор 16 рычага 6.
Затем (при нахождении объекта 4 в позиции А) фиксируют ЗУМП 1I результат измерения массы (М,, +М о по мощью микро-ЭВМ 9 повторно вычисляют нормированное значение крутизны S. и при его совпадении с первоначально вычисленным значением в пределах асимптотического условия нормировки Is,., - S,-ij-0, (42) определяют первую разницу между результатами прямых измерений, значение которой вводят в ЗУМП I1.
Затем по команде микро-ЭВМ 9 отключают электромагнит 13. Далее (при нахождении объекта 4 в позиции А) фиксируют ЗУМП 11 результат измерения массы М„д НС помощью микро-ЭВМ 9 вычисляют нормированное значение крутизны Sj-i передаточной характеристики (фиг.З), которое вводят в ЗУМП 11.
Затем по команде микро-ЭВМ 9 и с помощью исполнительного механизма 20 устанавливают упор 16 рычага 6 и устраняют упор 17 рычага 6.
Затем (при нахождении объекта 4 в позиций А) фиксирзтат ЗУМП. 1 1 результат измерения массы М
Pfl, с помощью
микро-ЭВМ 9 повторно вычисляют нормированное значение крутизны 8, и при его совпадении с первоначально вычисленным значением в пределах асимптотического условия нормировки
S,., - Sj.J-O, (43) определяют вторую величину между результатами прямых измерений, значение которой вводят в ЗУМП 11.
мощью микро-ЭВМ 9 повторно вычисляют 10 нормированное значение крутизны S,.g и при его совпадении с первоначально вычисленным значением в пределах асимптотического условия нормировки
о о P4-I 4-81
О
(45)
15
определяют четвертую разницу между результатами прямых измерений,значение которой вводят в ЗУМП 11.
Затем микро-ЭВМ 9 проверяет выполнение условий (3) и при их соблю- Далее по команде микро-ЭВМ 9 вклю- 2о дении вычисляют определяемую (контро- чают электромагнит 13 и с помощью ис лируёмую) массу М движущегося объек- полнительного механизма 20 устанавли- та 4 по формуле (2). При не вьтолнении условий (3) микро-ЭВМ 9 проводит конечное (итоговое), вычисление по 25
35
вают упор 18 рычага 6 и устраняют упор 16 рычага 6.
Затем (при нахождении объекта 4 в позиции В) на грузоизмёрительной платформе 2 фиксируют ЗУМП 11 результат измерения массы () и с помощью микро-ЭВМ 9 вычисляют нормированное значение крутизны S, /- пере- зо даточной характеристики (фиг.;, ко- .торое вводят в ЗУМП 11.
Затем по команде микро-ЭВМ 9 и с помощью исполнительного механизма 20 устанавливают упор 18 рычага 6 и устраняют упор 18 рычага 6.
Далее (при нахождении объекта 4 в позиции В) фиксируют ЗУМП 11 результат измерения массы (,+MO) , с помощью микро-ЭВМ 9 повторно вычисляют нормированное значение крутизны iS.g и при его совпадении с первоначально вычисленным значением в преде- лах асимптотического условия нормировки
|Sv5- S,.J-0, (44) определяют третью разницу между результатами прямых измерений, значение которой вводят в ЗУМП 11.
Затем по команде микро-ЭВМ 9 отк-п лючают электромагнит 13.
40
со о тнощению ( 1).
Далее по команде микро-ЭВМ 9 индицируется результат определения массы MX движзщегося объекта 4 на цифровом оконечном индикаторе 15.
Затем по команде микро-ЭВМ 9 и с помощью исполнительного механизма 20 устраняют упор 18 рычага 6.
На этом процесс массоизмерения (массоконтроля) с использованием системы, изображенной на фиг.1, имеющей передаточнзпо характеристику, изображенную на фиг.З, прекращают. При несоблюдении в процессе массоизмерения (массоконтроля) любого из условий нормировки (42) - (45) измерительный процесс прерывают и проводят регулировку массоизмерительной системы.
50
45 Формула изобретения
Способ измерения массы, заключающийся в измерении суммарной массы измеряемого объекта и массы грузопри- емной платформы совместно с эталонной массой и без нее, вычислении разностей результатов смежных измерений и вычисления массы по заданной формуле, отличающийся тем, что, с целью повьшения точности, устанавли-, вают первый коэффициент передачи входного механизма весоизмерительной системы, присоединяют эталонную массу к грузоприемной платформе и провоПосле чего (при нахождении объекта 4 в позиции Б), фиксируют ЗУМП 11 результат измерения массы () и с помощью микро-ЭВМ 9 вычисляют, нормированное значение крутизны 84-7 передаточной характеристики (фиг.З), .которое вводят в ЗУМП 11.
1366882 °
Далее по команде микро-ЭВМ 9 и с помощью исполнительного механизма 20 устанавливают упор 18 рьгаага 6 и устраняют упор I9 рычага 6.
Затем (при нахождении объекта 4 в позиции Б), фиксируют ЗУМП 11 результат измерения массы (М„„+М), с полл- М,),
мощью микро-ЭВМ 9 повторно вычисляют 10 нормированное значение крутизны S,.g и при его совпадении с первоначально вычисленным значением в пределах асимптотического условия нормировки
о о P4-I 4-81
О
(45)
нии условий (3) микро-ЭВМ 9 проводит конечное (итоговое), вычисление по 5
5
о
0
со о тнощению ( 1).
Далее по команде микро-ЭВМ 9 индицируется результат определения массы MX движзщегося объекта 4 на цифровом оконечном индикаторе 15.
Затем по команде микро-ЭВМ 9 и с помощью исполнительного механизма 20 устраняют упор 18 рычага 6.
На этом процесс массоизмерения (массоконтроля) с использованием системы, изображенной на фиг.1, имеющей передаточнзпо характеристику, изображенную на фиг.З, прекращают. При несоблюдении в процессе массоизмерения (массоконтроля) любого из условий нормировки (42) - (45) измерительный процесс прерывают и проводят регулировку массоизмерительной системы.
Формула изобретения
Способ измерения массы, заключающийся в измерении суммарной массы измеряемого объекта и массы грузопри- емной платформы совместно с эталонной массой и без нее, вычислении разностей результатов смежных измерений и вычисления массы по заданной формуле, отличающийся тем, что, с целью повьшения точности, устанавли-, вают первый коэффициент передачи входного механизма весоизмерительной системы, присоединяют эталонную массу к грузоприемной платформе и прово
дят первое измерение - массы плат- формы с присоединенной к ней эталонной массой, затем устанавливают второй коэффициент передачи и проводят второе измерение вновь измеряют массу платформы с эталонной массой, .производят вычисление разности перво366882..
дят восьмое измерение - вновь изм ряют массу объекта и платформы, в числяют раэность результатов вось го и седьмого измерений, причем к эффициенты передачи устанавливаю такими, чтобы отношение первого и них к второму и отношение третьег к четвертому были бы близкими к
й.Д 5283- Аг U з5 5ц.
.
М.
15:
го и второго измерений, после этого отсоединяют эталонную массу и прово- 10 нице, но не равны ей, а массу М дят третье измерение - массы платфор- объекта определяют по формуле мы, после чего вновь устанавливают первый коэффициент передачи и проводят четвертое измерение - повторно измеряют массу платформы, вычисляют разность между результатами четвертого и третьего измерений, затем устанавливают третий коэффициент передачи, присоединяют эталонную массу к платформе и проводят пятое измерение - суммарной массы объекта, платформы и эталонной массы, после чего устанавливают четвертый коэффициент передачи и выполняют шестое измерение - повторно измеряют суммарную массу, вычисляют разность результатов пятого и шестого измерений, затем отсоединяют эталонную массу и проводят седьмое измерение - массы объекта и платформы, повторно устанавливают третий коэффициент передачи и прово20
25
30
tt:t: :ii sTru7s;-T37T
где u, разности соотв
ственно между вым и вторым, вертым и треть пяты и шестым и сед измерениями;
нормированные чения крутизн преобразовани редаточной ха теристики вход механизма, сф рованные изме ями коэффицие передачи;
-- величина этал ной массы.S, , и S,
м
/ 3
дят восьмое измерение - вновь измеряют массу объекта и платформы, вычисляют раэность результатов восьмого и седьмого измерений, причем коэффициенты передачи устанавливают такими, чтобы отношение первого из ; них к второму и отношение третьего к четвертому были бы близкими к единице, но не равны ей, а массу М объекта определяют по формуле й.Д 5283- Аг U з5 5ц.
.
М.
нице, но не равны ей, а массу М объекта определяют по формуле
tt:t: :ii sTru7s;-T37T
де u, разности соответ-,
ственно между первым и вторым, чет-, вертым и третьим, пяты и шестым, и седьмым измерениями;
нормированные значения крутизны преобразования передаточной харак теристики входного механизма, сформированные изменениями коэффициентов передачи;
-- величина эталонной массы.S, , и S,
м
1 - Щгттт
N
f 9.0f.Q./7ff
Ф(е,2
fftuf.Z
| Бромберг Э.М | |||
| и др | |||
| Тестовые методы повышения точности измерений | |||
| М.: Энергия, 1978, с.145. |
