(54) УСТРОЙСТВО ДЛЯ ИЗЛгЕРЕНИЯ МАССЫ
Функция преобразования любого ма-ссоизмерлтельного устройства, имеющего как линейную, та.к и существенно нелинейную характеристику, сможет быть с помощью кусочно-линейной аппроксимации представлена в виде
у + Ь, (г: 1,2...,),
где у - выходной сипнал устройства;
Р - измеряемая масса; а,-,Ьг - параметры функции преобразования
устройства;
т - число линейных отрез коз, с помощью которых может быть описана в общем случае нелинейггая функция .преобразования устройства. Величина параметров а;,/,; зависит от измеряемой маасы Р в силу нелинейности функции ПреОбразо1ва1Н:ия устройства, а .кроме того, от .изменения виещпих условий и от временного дрейфа характеристик отдельных элементов. При этом из.менение параметров ai,bi обусловливает погрещность измерения. Влияние параметров на точ.ность измерения массы устранено в описызаем.ом устройстве за счет автоматической коррекции погрешностей.
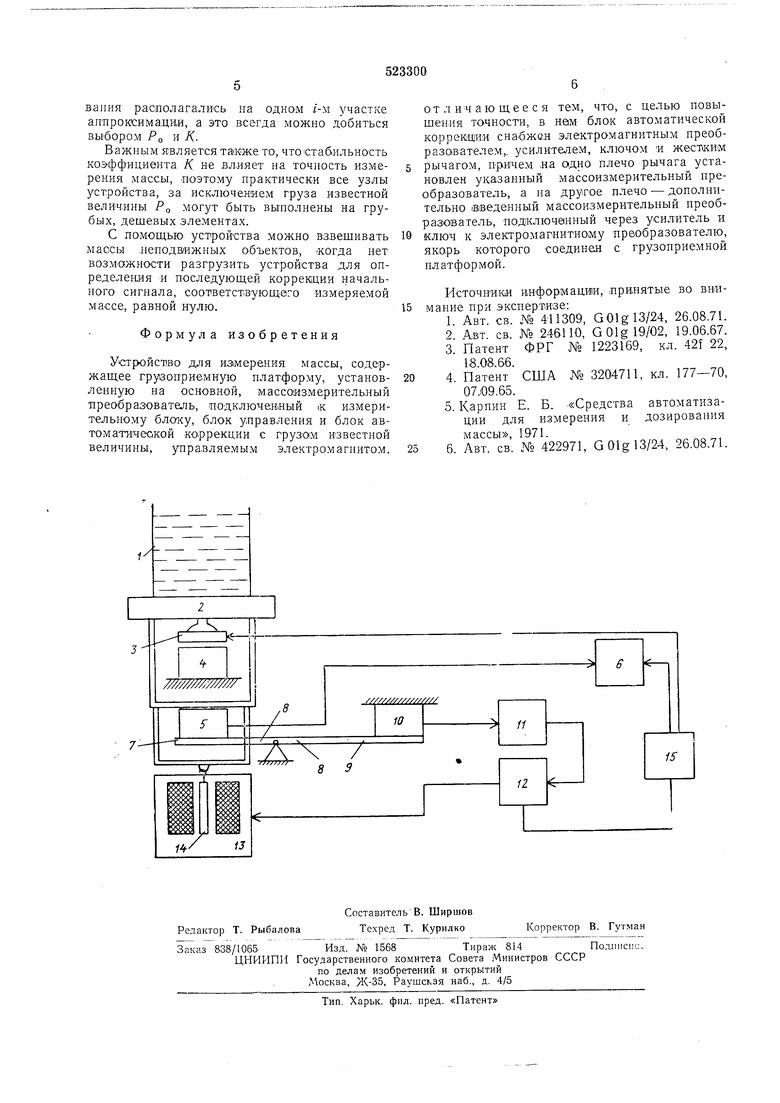
Работает устройство следующим образом. Процесс изм1ерен1ия состоит ,из четырех тактов преобразований. В иер1вом такте блО|К управления 15 .включает электромарнит 3 и электронный ключ 12. При это.м электромагнитный преобразователь 13 обесточен, и якорь 14 не передает на грузоирие.мную .платформу 2 дополнительного усилия.
Таким образом, в перво.м такте с помощью основного маасоизмерительного преобразователя 5 и измерителыното блока 6 преобразуется масса Р взвещиваемого объекта. Результат i/i первого такта преобразования фиксируется в из.мерительном блоке 6 и связан с измеряемой массой Р соотнощением
г/1 ufP + bi.
Во iBTOpo.M такте преобразования блок унравления 15 замыкает электронный ключ 12, включая тем самым электромагнитный преобразователь 13, который через 14 передает на грузоприемную платформу 2 дополнительное усилие, эквивалентное увеличению массы взвещивае.мого объекта на величину KiP, где К - Коэффициент, равный шроизведению коэффициентов передачи рычата 8, преобразователя 10, усилителя // и электромагнитного преобразователя 13.
Таким образом, во втором такте преобразуется сумма Р ± КР масс, состоящая из массы вз1вещиваемого объекта /, некоторой дополеительной массы, соз.да1ваемой самим взвешиваемым объектом с помощью рычага 8, дополнительного массоизмерительного преобразователя 10, усилителя 11, который нитает обмотку электромагнитного преобразователя 13, создающего на я.коре 7 тяговое
усилие, иропорцио.нальиое питающему напряжению. Результат г/2 второго такта преобразования также фиксируется в измерительном блоке 6 и связан с иЗ|Меряемой массой Р соотнощением
У2 ai(P + KP) +bi.
В третьем такте преобразования блок управления 15 включает электрома-гнит 3, который притя:ги;вает груз 4 велИЧины Ра- Ключ 12 в этом такте остается вй :люченным. Таким образом, в третьем та-кте нреобразуется сумма масс Р + Р„ + К(Р -I- РО).
Результат г/з третьего такта преобразования фиксируется в измерительном блоке 6 и связан с измеряемой массой Р соотнощенигм
г/3 о4Р + Р, + К(Р + Р,) J- и/.
Наконец, в четвертом такте преобразования блок управ.ления 7-5 размыкает электронный ключ 12. При этом электромагнитный преобразователь 13 обесточен, и якорь М не
передает на грузоприемную платформу 2 дополнительного усил:ия. Таким образом, в четвертом тагхте преобра.зуется сумма Р + Р„ масс взвещиваемого объекта и груза известной величины. Результат г/4 чет1вертого такта
преобразования фиксируется в измерительном блоке 6 и связан с измеряемой массой Р соотношением
г/4 a(P + P,)bi.
Результаты четырех преобразований представляют собой систему четырех урав.нений с четырьмя неи.звестиыми Р, а,-, bi, К. Эта система может быть решена относительно любого из неизвестиых, в том числе относительно измеряемой массы Р.
TaiKHiM образом, в измерительном блоке 6 вычисляется значение измеряемой массы по формуле
Р
Рп.
(Уз--У2) - (У4-1/1)
Как видно из этого выражения, результат измерения не зависит от параметров а,-, Ь,функции преоб ра.зования устройства.
Таким образом, исключается влияние на точность измерения изменений этих коэффициентов, а следовательно и изменений внещних условий и .вре.менного дрейфа отдельных узлов и элементов устройства.
KpoiMe того, исключается влияние нелинейности характеристик датчи1ков в пределах точности куоочно-ли нейной ап.про«симации, так как .коэффициенты а и Ь,- вычисляются для .да 1ного конкретного участка характеристиши, который соответствует измеряемой массе. При этом характеристика устройства .может быть существенно нелинейна и степень нелинейности может быть неизвестна, необходимо только, чтобы все четыре преобразо
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения массы | 1975 |
|
SU523299A1 |
| Способ измерения электрических и неэлектрических величин | 1985 |
|
SU1269038A1 |
| Способ измерения электрических и неэлектрических параметров | 1978 |
|
SU785769A1 |
| Устройство для измерения массы | 1978 |
|
SU685922A1 |
| Автоматический весовой порционный дозатор с цифровым управлением | 1981 |
|
SU1000773A1 |
| Устройство измерения массы с автоматической коррекцией погрешностей | 1973 |
|
SU512389A1 |
| Автоматические весы | 1987 |
|
SU1506307A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ, ИНДУКТИВНОСТИ И ЕМКОСТИ (ВАРИАНТЫ) | 2009 |
|
RU2395100C1 |
| Массоизмерительное устройство | 1983 |
|
SU1164554A1 |
