Од Од
ю
Изобретение относится к измерительной технике и может быть использовано для измерения частоты и периода сигналов с повышенными точностью и помехоустойчивостью.
Целью изобретения -является повышение точности и помехоустойчивости измерения частоты и периода сигнала без увеличения времени измерения.
На чертеже представлена структурная схема измерителя периода
Устройство Содержит первый формирователь 1 импульсов, вход которого является входом измерителя периода, а выход через последовательно соединенные первую схему И 2, эле-, мент 3 задержки, вычитающий счетчик . 4 и второй сумматор 5 подключен к первому сумматору 6, при этом выход первой схемы И 2 одновременно соединен с входом синхронизации второго сумматора 5, а выход вычитающего счетчика 4 через последовательно соединенные первый дешифратор 7, триггер 8 управления, вторую схему И 9 подключен к триггеру 10 запуска, второй вход которого является входом запуска измерителя, а выход подключен к второму входу первой схемы И 2 и входу третьей схемы И 11, выход триггера 8 управления одновременно подключен к управляющему входу вычитающего счетчика 4 и входу Единица переноса младшего разряда второго сумматора 5, выход которого одновременно через второй дешифратор 12 подключен к второму входу второй схемы И 9, а генератор 13 образцовой частоты через второй формирователь . 14 импульсов соединен с третьей схемой И 11, выход которой подключен к регистру 15 памяти, выход которого через первый сумматор 6 и счетчик 16 соединен с индикатором 17 и одновременно с вторым входом последнего, а второй выход сумматора 6 соединен
с вторым входом регистра 15 памяти. 1
Устройство работает следующим образом.
В исходном состоянии триггер 10 запуска и триггер 8 управления находятся в нулевом состоянии, схемы И 2, 9 и 11 закрыты, вычитающий счетчик 4 находится в состоянии п (число, соответствующее количеству усредняемых периодов), сумматоры 5, 6, регистр 15 памяти и счетчик 16 - в нулевом состоянии. Входной сигнал
366962.2
поступает на.формирователь 1 импульсов, на выходе которого образуется поток импульсов, соответствующих моментам перехода сигнала через нулевой уровень с положительной производной. Эти импульсы поступают на вход схемы И 2, Одновременно на вход схемы И 11 поступает импульс с вы- 10 хода второго формирователя 14 импульсов, на вход которого поступает сигнал от генератора 13 образцовой частоты. По сигналу запуска триггер 10
запуска переводится в состояние 1,
IF- которое, воздействуя на схемы И 2 и 11, выполняющие функции ключей,.раз- решает прохождение сигналов с выхода формирователей 1 и 14 импульсов в последующие цепи. При открытых схе20 мах И 2, 11 состояние сумматора 6, регистра 15 памяти и счетчика 16 будет нулевым и не изменится до тех пор, пока не появится первый импульс сигнала с выхода схемы И 2. Этим
25 сигналом число п, установленное в вычитающем счетчике 4, переписывается в сумматор 5, а после задержки в элементе 3 задержки на время, требуемое для записи числа в сумматор 5,
30 импульсом входного сигнала состояние счетчика 4 уменьшается на два. Первым импульсом после второго сигнала, сформированным в формирователе 14 из сигнала генератора 13 образцовой
о,- частоты, прошедшим через открытую схему И 11, результат суммирования в сумматоре 6, содержимое сумматора 5 и регистра 15 памяти будут записаны в регистр 15 памяти. Такая запись ре4Q зультата суммирования сумматора 6 в регистр 15 памяти осуществляется по каждому импульсу.образцовой частоты, поступающему от схемы И 11 на регистр 15 памяти. Следовательно, при
45 измерении первого периода сигнала содержимое регистра 15 памяти с каждым импульсом образцовой частоты увеличивается на п. Тем самым реализуется накапливающее суммирование, ре50 зультат которого к моменту поступления второго импульса входного сигнала .от схемы И 2 равен длительности первого периода входного сигнала, умноженного на весовой коэффициент
55 Q п. С приходом второго импульса - входного сигнала содержимое сумматора 5 увеличивается на (п-2), находящееся в вычитающем счетчике 4. К началу в торого периода входного сигнала в сумматоре 5 формируется весовой коэффициент QJ п+(п-2). Этим же импульсом входного сигйала, записанным в элементе 3 задержки, содержимое вычитающего счетчика 4 уменьшается еще на два и равно (п-4)о Тем самым подготавливается число для формирования весового коэффициента Qj. Значение весового коэффициента Qj, сформированное к началу действия второго периода в сумматоре 5, суммируется с содержимым регистра 15 памяти по каждому импульсу образцовой частоты. В счетчике
16 накапливается результат переполI нения сумматора 6. Измерения последующих периодов исследуемого сигнала не имеют особенностей до момента обнуления вычитающего счетчика 4, которое происходит при измерении (п/2+1)-го из усредняемых периодов. Начиная с этого момента, все последующие весовые коэффициенты формируются на выходе сумматора 5, обеспечивающего сложение содержимого сумматора 5 с содержимым вычитающего счетчика в дополнительном коде, т.е обеспечиваются условия для выполнения, операции вычитания и последующего уменьшения весовых коэффициентов. Для этого на выходе дешифратора 7 появляется сигнал, переводящий триггер 8 в состояние 1, которое устанавливается на входе схемы И 9, входе Единица переноса младшего разряда сумматора 5 и подключает к выходной шине счетчика 4 инверсный выход первого разряда. Это обеспечивает формирование дополнительного кода состояния счетчика 4, а после поступления импульса синхронизации - выполнение операции вычитания.
Цикл измерения завершается, когда происходит измерение последнего периода. В это время появляется сигнал на выходе дешифратора 12 и устанавливает триггер Ю в исходное состояние. Этот же сигнал может быть использован для приведения в исходное состояние всего измерителя.
В результате перечисленных операций с помощью вычитающего счетчика 4 и сумматора 5 формируются весовые коэффициенты, значения которых одинаковы для измеряемых периодов, рав- ностояпщх от начала и конца времени измерения. Результат измерения находится в регистре 15 памяти и счет
чике 16,:причем в регистре фиксируются младшие, а в счетчике 16 старшие разряды числа, пропорционального среднему значению периода исследуемого сигнала.
Покажем, что алгоритм формирования весовых коэффициентов, положенный в основу работы измерителя, обеспечивает уменьшение дисперсии оценки среднего периода без увеличения времени измерения. Для этого оценку среднего значения периода будем искать в виде
15
Т
g,-N,
где g;
Ni весовые коэффициенты, удовлетворяющие условию несмещенности оценки
(Ig; 1),
результат измерения i-ro Т
В таком представлении результата измерения задача оптимизации сводится к поиску весовых коэффициентов, . минимизирующих погрешность измерения. Измерение каждого периода сопровождается погрешностью квантования из- мерения - начала и конца, причем погрешность конца измерения i-ro периода- одновременно является погрешностью начала (i+1)-ro периода и имеет отрицательный знак. С учетом этого выражение для суммарной погрешности оценки складывается из погрешности измерения i-ro периода с учетом весового коэффициента
4Т g,(d,-d)+g,j(z,j-dp + +8h(n ) 15
0
5
где .
gi 5 8 Л2
погрешность начала измерения первого периода, взятая с весом погрешность конца измерения первого периода; погрешность измерения начала второго периода и так далее.
Вьфажение для лТ приведем к виду:
4Т g, л, +(g2-g,)5+(g3-g;)3t+.
,-g n-i)4n-gn h., + + :(g,Vi -g,-)4i .,
и найдем дисперсию погрешности по общим правилам
o((g,o-g.) +g J CD
Минимум (1) найдем методом неопределенных коэффициентов на основании которого составим выражение и определим экстремум функции
П-1
) + И (
iL i- (2)
-Л. ,
где Л - неопределенный коэффициент, получаемый в процессе оптимизации g ; ,
Для этого найдем частные произ- водныея (2) и приравняем к нулю:
aФ(g.)/Эg, ,,
откуда g : ,- (g,+ Л/2)та g 2g ,- -Я/2. V Аналогично
Зф(g.)/Эg 4gj-2g,-2gj-;i О, . - откуда -g2 5 (gi+g3+ /2) , а
ЕЗ 2g2-g -A/2,
т.д. до )(g,)/ag О и
Зф(g)/5gn О, откуда получим
g,., |- (g,.i+g,) и
gn 2 gh-i- /
Из полученных соотношений составим вьфажение для весовых коэффициентов в общем виде, представленное через значения g и
. g ig,-i(i-1)A/A и g. |-j(j-1)/4 (3)
Дисперсия оптимизированного алгоритма (5), найденная по (1) при
п 7 1, равна + (э 6 о /п и по сравнению с оценкой измерения периоИз (3) видно, что g. и g . одинаково представляются аналитически через
g.i и g и для весовые, коэффици- да прототипа, полученной при тех же енты равны: т,во g :, g, следова- условиях, эффективность предлагаемого устройства составит Q3 6 /&i,. Следовательно, устройство обеспечивает уменьшение дисперсии результата измерения не менее чем на 30% без увеличения времени измерения. С такой же эффективностью в устройстве одновременно уменьшается и шумовая составляющая суммарной погрешности. Влияние шумовой составляющей проявляется в флуктуациях начала и конца i-ro временного интервала. Поэтому,
тельно, весовая функция симметрична относительно середины времени усреднения. Из (3) запишем выражения для весовых коэффициентов, соответствующих средним значениям из усредняемых периодов
50
п
/п
л
11 11 /11 -l 1 g - 2- gi - 2 -2 4
/п ..ч. с J. 1 (-2 +1)gn-(2 + 1)2
и
55
8я,,
а учитывая, что g „jj § i
gi
n.
найдем отсюда, что g , gp
если время корреляции ( D) шума J „ Т„ , то за время усреднения
. Это позволит записать общее выражение (3) в виде
g; i(n+1-i);i/4
Определим значение неопределенного коэффициента из условия несмещенности оценки
п Hg. Г- И i(n-H-i) l и
и Д А/Ц i(n+1-i)
Следовательно, учитывая, что
(n+1)/2 и XI i п(п+1) х((п+2)/ё, В результате получим значения весовых коэффициентов, минимизирующих дисперсию (1) без увеличения времени измерения: и
g; i(n+l-i /|I i(n+1-i) i, (п+1-i) , ,, /,4
- n(nTTT(n+2T - Q; (
где k 6/n(n+1)(n+2), a Q; i(n+1-i).
Следовательно, оценка среднего значения периода исследуемого сигнала имеет погрешность с дисперсией (1) и весовыми коэффициентами (4), минимизирующими значение суммарной погрешности, т.е.
Т
g.N; k2 Q N,.
ir 1ill
-kZl i(n+1-i)N; .
(5)
0
Дисперсия оптимизированного алгоритма (5), найденная по (1) при
п 7 1, равна + (э 6 о /п и по сравнению с оценкой измерения перио да прототипа, полученной при тех же условиях, эффективность предлагаемого устройства составит Q3 6 /&i, Следовательно, устройство обеспечивает уменьшение дисперсии результата измерения не менее чем на 30% без увеличения времени измерения. С такой же эффективностью в устройстве одновременно уменьшается и шумовая составляющая суммарной погрешности. Влияние шумовой составляющей проявляется в флуктуациях начала и конца i-ro временного интервала. Поэтому,
если время корреляции ( D) шума J „ Т„ , то за время усреднения
(Т n-T) будет n T/f,. независимых отсчетов, которые подвергаются весовой обработке по алгоритму (5).
Поэтому оценку погрешности шумовой
составляющей можно провести по приведенным формулам, а &1 будет представлять дисперсию шумовой составляющей одного периода. В результате по сравнению с шумовой составляющей погрешности прототипа будет уменьшена одновременно и шумовая составляющая суммарной погрешности на 30% без увеличения времени измерения, что и составляет сущность положител JHoro эффекта.
|формула изобретения
Цифровой измеритель периода, содержащий генератор образцовой частоты, первый формирователь импульсов, вход которого является входом устройства, последовательно соединенные регистр памяти, первый сумматор, счетчик и индикатор, второй вход которого соединен с первым входом первого сумматора, второй выход первого сумматора подключен к входу регистра памяти, отличаю щий- с я тем, что, с целью повьшгения точности и помехоустойчивости, в него введены второй формирователь им
пульсов, первая, вторая и третья схемы И, триггер запуска, триггер управления, первый и второй дешифраторы, элемент задержки, вычитающий счетчик и второй сумматор, при.этом выход первого формирователя- импульсов через последовательно соединенные первую схему И, элемент задержки, вычитающий счетчик и второй сумматор подключен к второму входу первого сумматора, выход первой схемы И одновременно Соединен с входом синхронизации второго сумматора, а выход вычитающего счетчика через последовательно соединенные первый дешифратор, триггер управления, вторую схему И подключен к первому входу триггера запуска, второй вход которого является входом запуска измерителя, а выход подключен к второму входу первой и первому входу третьей схем И, выход триггера управления одновременно соединен с управляюпщм входом вычитающего счетчика и входом Единица переноса младшего разряда второго сумматора, выход которого через второй дешифратор подключён к второму входу второй схемы И, генератор образцовой частоты через второй формирователь импульсов соединен с вторым входом третьей схемы И, выход которой соединен с вторым входом регистра памяти.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой частотомер | 1988 |
|
SU1636786A1 |
| Цифровой частотомер | 1980 |
|
SU892332A1 |
| Способ измерения частоты | 1987 |
|
SU1613968A1 |
| Цифровой частотомер | 1983 |
|
SU1167519A1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ АНАЛОГ - КОД | 1991 |
|
RU2027303C1 |
| Цифровое измерительное устройство для обработки сигналов частотных датчиков | 1989 |
|
SU1659891A1 |
| Устройство для автоматической компенсации погрешности измерительного канала | 1989 |
|
SU1675853A1 |
| Цифровой частотомер | 1985 |
|
SU1293664A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1410277A1 |
| Способ измерения мгновенных значений частоты электрического сигнала и устройство для его осуществления | 1987 |
|
SU1503022A1 |
Изобретение может быть использовано для измерения частоты и перио,да сигналов с повышенной точностью И помехоустойчивостью. Целью изобретения является повышение точности и помехоустойчивости измерения частоты и периода сигнала без увеличения времени измерения. Устройство содержит формирователи 1 и 14 импульсов, элементы И 2,9 и 11, элемент 3 задержки, вычитающий счетчик 4, сумматоры 5 и 6, дешифраторы 7 и 12, триггер 8 управления, триггер 10 запуска, генератор 13 образцовой частоты, регистр 15 памяти, счетчик 16 и индикатор 17. В предложенном устройстве по сравнению с шумовой составляющей погрешности прототипа будет одновременно уменьшена на. 30% и шумовая составляющая суммарной погрешности без увеличения времени измерения. 1 ил. S (/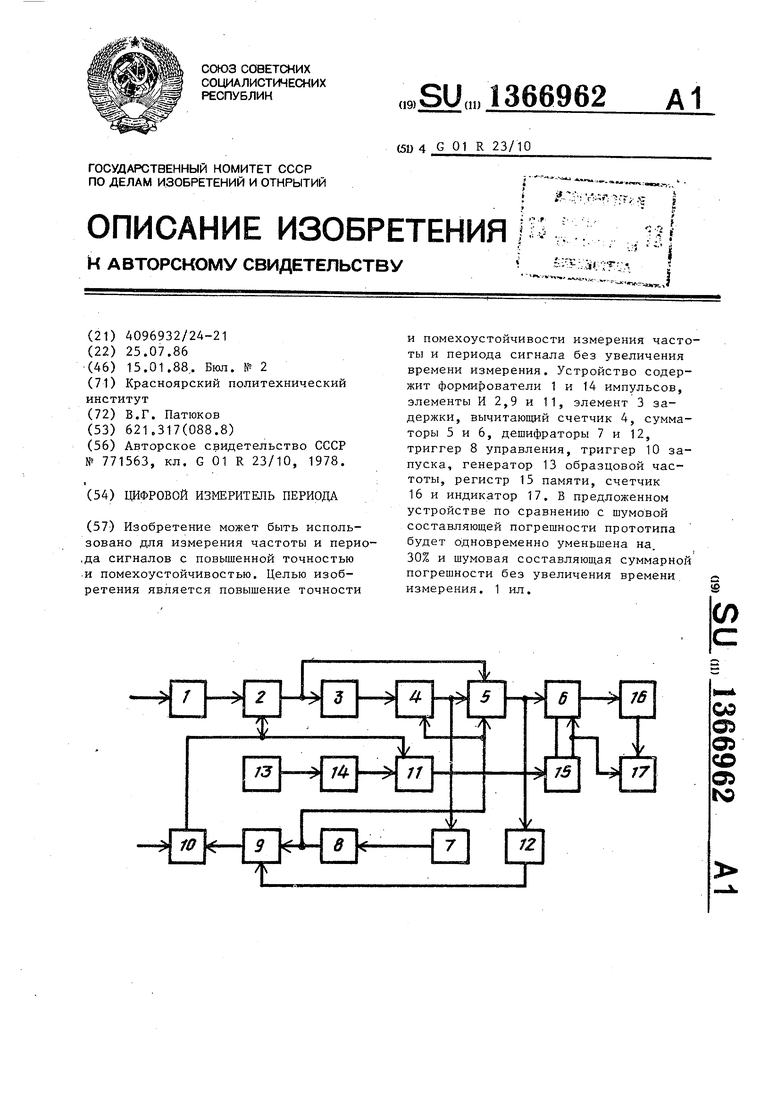
| Цифровой измеритель периода | 1978 |
|
SU771563A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
