Од
4
00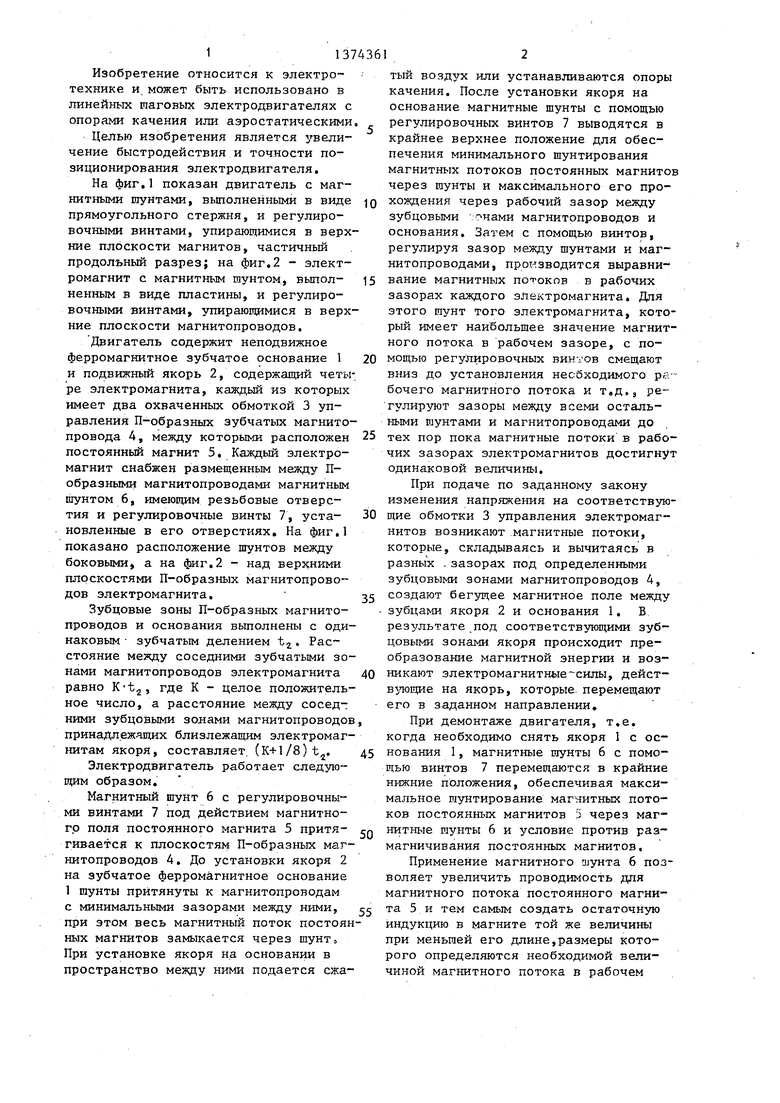
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ЭЛЕКТРОМАГНИТ | 2007 |
|
RU2322720C1 |
| Магнитоэлектрический линейный двигатель | 1987 |
|
SU1582295A1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2019 |
|
RU2704021C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ | 2008 |
|
RU2375807C1 |
| Шаговый электродвигатель | 1983 |
|
SU1310963A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2168836C1 |
| Линейный шаговый электродвигатель | 1988 |
|
SU1658314A1 |
| ОДНОКАТУШЕЧНЫЙ БЫСТРОДЕЙСТВУЮЩИЙ ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД С ПРЯМОХОДОВЫМ ЯКОРЕМ | 2008 |
|
RU2374545C1 |
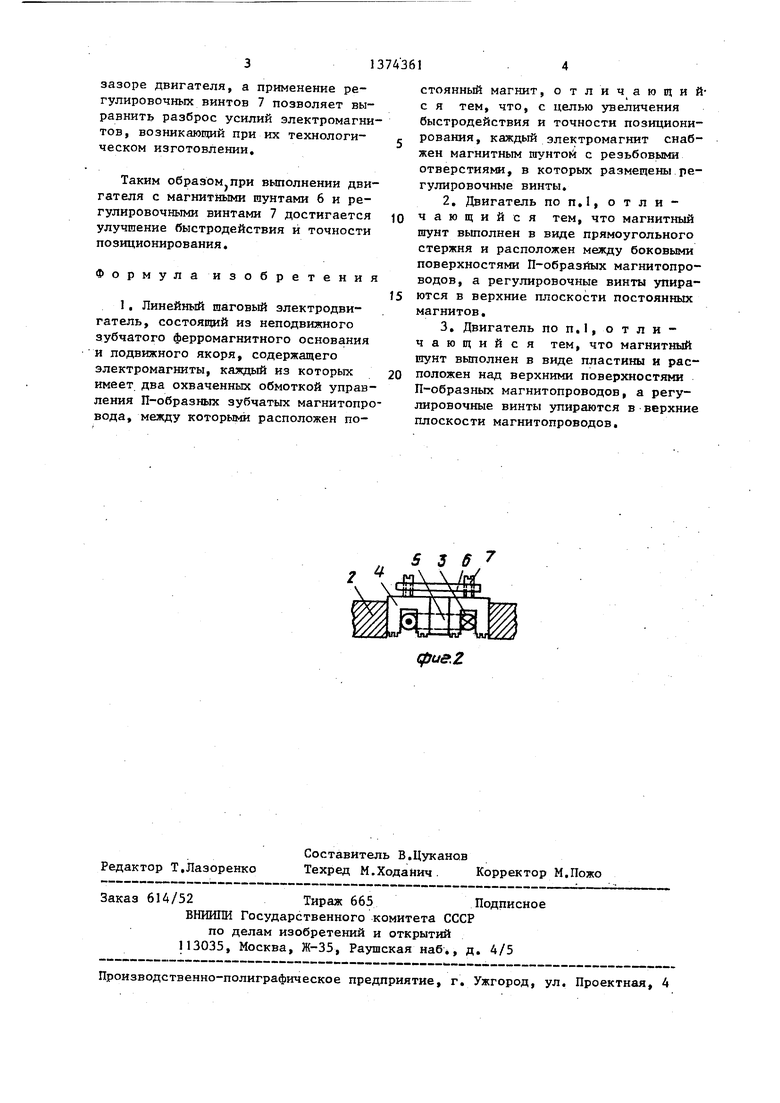
Изобретение относится к электротехнике, к линейным шаговым электродвигателям, и может быть использовано для поступательного перемещения подвижных элементов технологического оборудования. Цель состоит в увеличении быстродействия и точности позиционирования. Электродвигатель содержит направляющую 1 в виде ферромагнитного зубчатого основания и подвижный якорь, состоящий из корпуса 2, в котором закреплены электромагниты. Каждьш электромагнит включает два П-образных шихтованных полюса 3 с зубцами на поверхностях, обращенных к основанию, постоянный магнит 4, расположенный между полюсами, обмотку управления 5, расположенную в пазах полюсов, и магнитный шунт 6, примыкающий к полюсам двигателя. Шунты снабжены винтами 7, для которых в шунтах имеются резьбо-. вые отверстия. Изменением положения шунтов 6 регулируется магнитная проводимость цепи постоянного магнита 4 и магнитные потоки электромагнитов, что увеличивает быстродействие и выравнивает усилие отдельных электромагнитов, 2 з.п, ф-лы. 2 ил. (Л
CpuS.1
Изобретение относится к электротехнике и может быть использовано в линейных шаговых электродвигателях с опорами качения или аэростатическими
Целью изобретения является увеличение быстродействия и точности позиционирования электродвигателя,
На фиг,1 показан двигатель с магнитными шунтами, вьтолненными в виде прямоугольного стержня, и регулировочными винтами, упирающимися в верхние плоскости магнитов, частичный продольный разрез; на фиг,2 - электромагнит с магнитным шунтом, выпол- ненным в виде пластины, и регулировочными винтами, упирающимися в верхние плоскости магнитопроводов.
Двигатель содержит неподвижное ферромагнитное зубчатое основание 1 и подвижный якорь 2, содержащий четыре электромагнита, каждый из которых имеет два охваченных обмоткой 3 управления П-образных зубчатых магнито- провода 4, между которыми расположен постоянный магнит 5, Каждый электромагнит снабжен размещенным между П- образными магнитопроводами магнитным шунтом 6, имеюгцим резьбовые отверстия и регулировочные винты 7, уста- новленные в его отверстиях. На фиг,1 показано расположение шунтов между боковыми, а на фиг,2 - над верхними плоскостями П-образных магнитопроводов электромагнита,
Зубцовые зоны П-образных магнитопроводов и основания вьтолнены с одинаковым зубчатым делением t. Расстояние между соседними зубчатыми зонами магнитопроводов электромагнита равно K tjj где К - целое положительное число, а расстояние между соседними зубцовыми золами магнитопроводов принадлежащих близлежащим электромагнитам якоря, составляет. (K+l/8)t,j.
Электродвигатель работает следующим образом,
Магнитный шунт 6 с регулировочными винтами 7 под действием магнитного поля постоянного магнита 5 притя- гивается к плоскостям П-образных магнитопроводов 4, До установки якоря 2 на зубчатое ферромагнитное основание 1 шунты притянуты к магнитопроводам с минимальными зазорами между ними, при этом весь магнитный поток постоянных магнитов замыкается через шунт При установке якоря на основании в пространство между ними подается сжатый воздух или устанавливаются опоры качения. После установки якоря на основание магнитные шунты с помощью регулировочных винтов 7 выводятся в крайнее верхнее положение для обеспечения минимального шунтирования магнитных потоков постоянньк магнито через шунты и максимального его прохождения через рабочий зазор между зубцовыми онами магнитопроводов и основания. Затем с помощью винтов, регулируя зазор между шунтами и маг- нитопроводами, производится выравнивание магнитных потоков в рабочих зазорах каждого электромагнита. Для этого шунт того электромагнита, который имеет наибольшее значение магнитного потока в рабочем зазоре, с помощью регулировочных винтов смещают вниз до установления необходимого p« бочего магнитного потока и ТвД.з Р гулируют зазоры между всеми остальными шунтами и магнитопроводами до тех пор пока магнитные потоки в рабочих зазорах электромагнитов достигну одинаковой величины.
При подаче по заданному закону изменения напряжения на соответствзгю щие обмотки 3 управления электромагнитов возникают магнитные потоки, которые, складываясь и вычитаясь в разных .зазорах под определенными зубцоБыми зонами магнитопроводов 4, создают бегущее магнитное поле между зубцами якоря 2 и основания 1, В результате,под соответствлпощими зубцовыми зонами якоря происходит преобразование магнитной энергии и возникают электромагнитные силы, действующие на якорь, которые, перемещают его в заданном направлении.
При демонтаже двигателя, т,е, когда необходимо снять якоря 1 с основания 1, магнитные шунты 6 с помощью винтов 7 перемещаются в крайние нижние положения, обеспечивая максимальное шунтирование магнитных потоков постоянных магнитов 5 через магнитные 6 и условие против размагничивания постоянных магнитов.
Применение магнитного шунта 6 позволяет увеличить проводимость для магнитного потока постоянного магнита 5 и тем самым создать остаточную индукцию в магните той же величины при меньшей его длине,размеры которого определяются необходимой величиной магнитного потока в рабочем
зазоре двигателя, а применение регулировочных винтов 7 позволяет вы- равнить разброс усилий электромагнитов, возникающий при их технологическом изготовлении.
Таким образом при вьтолнении двигателя с магнитными шунтами 6 и регулировочными винтами 7 достигается улучшение быстродействия и точности позиционирования.
Формула изобретения
1, Линейный шаговый электродвигатель, состоящий из неподвижного зубчатого ферромагнитного основания и подвижного якоря, содержащего электромагниты, каждый из которых имеет два охваченных обмоткой управления П-образных зубчатых магнитопро- вода, между которыми расположен постоянный магнит, отличающий- с я тем, что, с целью увеличения быстродействия и точности позициони- рования, каждый электромагнит снабжен магнитным шунтой с резьбовыми отверстиями, в которых размещены регулировочные винты.
шунт вьтолнеи в виде прямоугольного стержня и расположен между боковыми поверхностями П-образйых магнитопро- водов, а регулировочные винты упира- ются в верхние плоскости постоянных магнитов,
3,Двигатель по п,1, о т л и - чающийся тем, что магнитный шунт выполнен в виде пластины и расположен над верхними поверхностями П-образных магнитопроводов, а регулировочные винты упираются в верхние плоскости магнитопроводов.
. 5 5 /f 7
У /г/
Viii3
cfjue.Z
| Механизм шагового перемещения | 1977 |
|
SU746830A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU989699A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
