1
Изобретение относится к области электрическнх машин, в частности к шаговым электродвигателям с плоским якорем, и может быть использовано в позиционных устройствах, требуюгцих перемещения подвижного элемента по двум координатам в плоскости.
Известны двухкоординатные шаговые электродвигатели.
Одна из известных конструкций двухкоординатного шагового двигателя содержит плоский безобмоточный зубчатый якорь и индуктор с зубчатылда полюсами l
Наиболее близким к предлагаемому по технической сущности является двухкоординатный шаговьШ электродвигатель, содержащий плоский безобмоточный зубчатый якорь и индуктор с охваченными обмотками управления зубчаТыми полюсами, попарно связанными между собой постоянными магнитами 2
Расположение обмоток управления в известных двигателях на крайних сердечниках полюсов не позволяет, уменьшить габариты индукторов, что приводит к появлению паразитных вращающих моментов, влияющих на точностные показатели двигателя. Совместная компановка обеих координат в двухкоординатном индукторе является трудоелокнм процессом и требует введения дополнительных крепежных элементов, что снижает быстродействие.
Целью изобретения являегся повыше ние быстродействия и точности обработки перемещения по любой траекторий.
Это достигается тем, что каждая пара включает в себя полюса с взаимно перпендикулярным направлением зубЦов а также тем, что каждый из полюсов выполнен Ш-образным с расположением обмоток управления на среднем стержне со сдвигом зубцов крайних, стержней относительно зубцов среднего стержня на половину зубцового деления. Кроме того, магнит, связывающий пару полюсое, выполнен из двух частей, каждая.из которых с одной стороны примыкает к полюсу, а с другой - к общему для всех полюсов .рму.
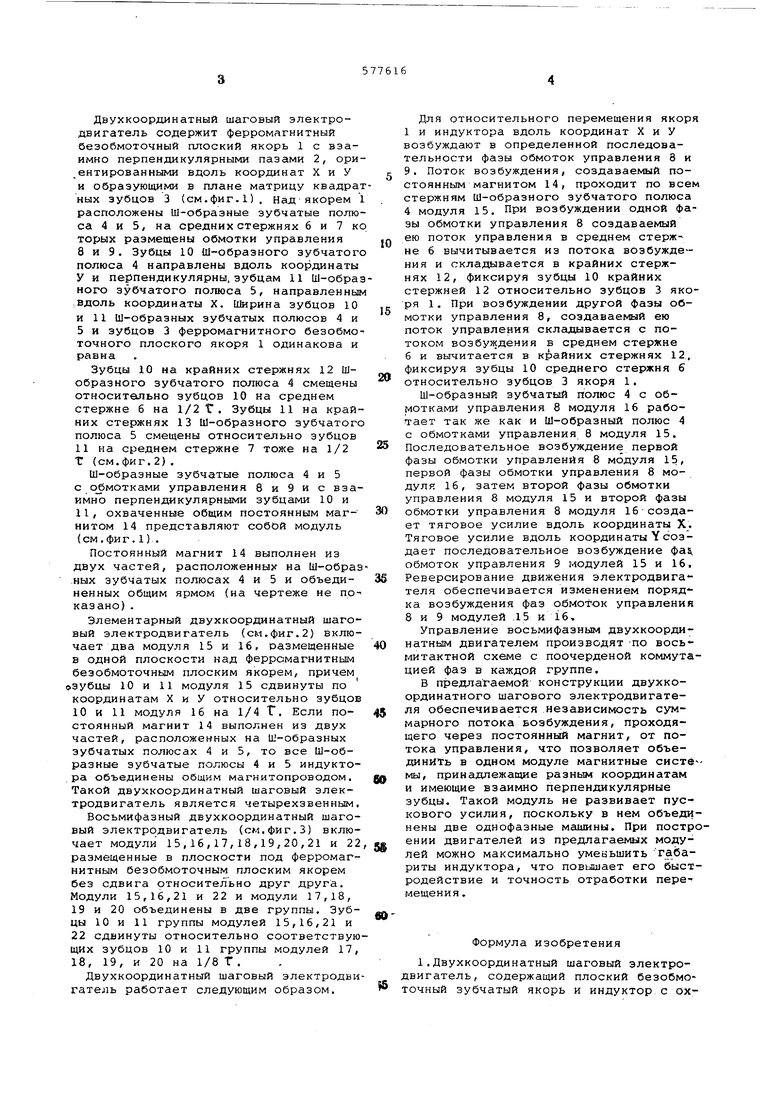
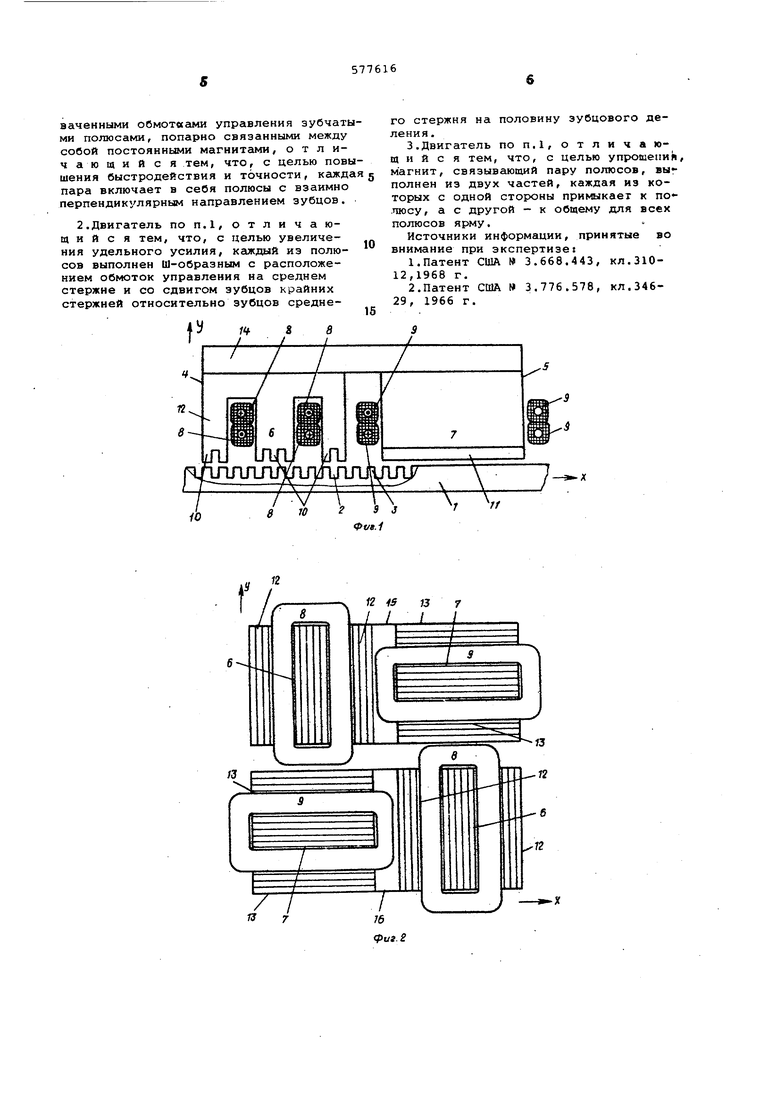
На фигЛ изображен разрез модуля индуктора в аерти кальной плоскости; на фиг. 2- вид со стороны воздушного зазора на индуктор, образованный двумя модулями; на фиг.З - вид со стороны воздушного зазора на индуктор, образованный восемью модулями.
Двухкоординатный шаговый электродвигатель содержит ферромагнитный безобмоточный плоский якорь 1 с взаимно перпендикулярными пазами 2, ори ентированными вдоль координат X и У и образующими в плане матрицу квадратных зубцов 3 (см.фиг.1), Над якорем 1 расположены Ш-обраэные зубчатые полюса 4 и 5, на средних стержнях б и 7 ко торых размещены обмотки управления 8 и 9. Зубцы 10 Ш-образного зубчатого полюса 4 направлены вдоль коо эдинаты У и перпендикулярны, зубцам 11 Ш-образного зубчатого полюса 5, направленным ,вдоль координаты X. ЕИирина зубцов 10 и 11 Ш-образных зубчатых полюсов 4 и 5 и зубцов 3 ферромагнитного безобмоточного плоского якоря 1 одинакова и равна
Зубцы 10 на крайних стержнях 12 Шобразного зубчатого полюса 4 смещены относительно зубцов 10 на среднем стержне 6 на 1/2 Г. Зубцы 11 на крайних стержнях 13 Ш-образного зубчатого полюса 5 смещены относительно зубцов 11 на среднем стержне 7 тоже на 1/2 Т (см.фиг.2).
Ш-образные зубчатые полюса 4 и 5 с о бмотками управления 8 и 9 и с взаимно перпендикулярными зубцами 10 и 11, охваченные общим постоянным магнитом 14 представляют собой модуль (см , фи г. 1) .
Постоянный магнит 14 выполнен из двух частей, расположенных на Ш-образных зубчатых полюсах 4 и 5 и объединенных общим ярмом (на чертеже не прказано).
Элементарный Двухкоординатный шаговый электродвигатель (см.фиг.2) включает два модуля 15 и 16, размещенные в одной плоскости над ферромагнитным безобмоточным плоским якорем, причем озубцы 10 и 11 модуля 15 сдвинуты по координатам X и У относительно зубцов 10 и 11 модуля 16 на 1/4 Г. Если постоянный магнит 14 выполнен из двух частей, расположенных на Ш-образных зубчатых полюсах 4 и 5, то все Ш-образные зубчатые полюсы 4 и 5 индуктора объединены общим магнитопроводом. Такой Двухкоординатный шаговый электродвигатель является четырехзвенным, Восьмифазный Двухкоординатный шаговый электродвигатель (см.фиг.3) включает модули 15,16,17,18,19,20,21 и 22 размещенные в плоскости под ферромагнитным безобмоточным плоским якорем без сдвига относительно друг друга. Модули 15,16,21 и 22 и модули 17,18, 19 и 20 объединены в две группы. Зубцы 10 и 11 группы модулей 15,16,21 и 22 сдвинуты относительно соответствующих зубцов 10 и 11 группы модулей 17, 18, 19, и 20 на 1/8 Т .
Двухкоординатный шаговый электродвигатель работает следующим образом.
Для относительного перемещения якор 1 и индуктора вдоль координат X и У возбуждают в определенной последовательности фазы обмоток управления 8 и 9. Поток возбуждения, создаваемый постоянным магнитом 14, проходит по все стержням Ш-образного зубчатого полюса 4 модуля 15. При возбуждении одной фазы обмотки управления 8 создаваемый ею поток управления в среднем стержне 6 вычитывается из потока возбуждения и складывается в крайних стержнях 12, фиксируя зубцы 10 крайних стержней 12 относительно зубцов 3 якоря 1. При возбуждении другой фазы обмотки управления 8, создаваемый ею поток управления складывается с потоком возбуждения в среднем стержне 6 и вычитается в крайних стержнях 12, фиксируя зубцы 10 среднего стержня 6 относительно зубцов 3 якоря 1.
Ш-образный зубчатый полюс 4 с обмотками управления 8 модуля 16 работает так же как и Ш-образный полюс 4 с обмотками управления 8 модуля 15. Последовательное возбуждение первой фазы обмотки управления 8 модуля 15, первой фазы обмотки управления 8 модуля 16, затем второй фазы обмотки управления 8 модуля 15 и второй фазы обмотки управления 8 модуля 16-создает тяговое усилие вдоль координаты X. Тяговое усилие вдоль координатыYсоздает последовательное возбуждение фаа, обмоток управления 9 модулей 15 и 16. Реверсирование движения электродвигателя обеспечивается изменением порядка возбуждения фаз обмоток управления 8 и 9 модулей ,15 и 1б,
Управление восьмифазным двухкоординатньом двигателем производят -по вось г итактной схеме с поочерденой коммутацией фаз в каждой группе.
В предлагаемой конструкции двухкоординатного шагового электродвигателя обеспечивается независимость суммарного потока возбуждения, проходящего через постоянный магнит, от потока управления, что позволяет объединить в одном модуле магнитные сметемы, принадлежаодае разным координатам и имеющие взаимно перпендикулярные зубцы. Такой модуль не развивает пускового усилия, поскольку в нем объединены две однофазные машины. При пострении двигателей из предлагаемых модулей можно максимально уменьшить габариты индуктора, что повышает его быстродействие и точность отработки перемещения .
Формула изобретения
1.Двухкоординатный шаговый электродвигатель, содержащий плоский безобмоточный зубчатый якорь и индуктор с охааченными обмотквмк управления зубчаты ми полюсами, попарно связанными между собой постоянными магнитами, о т л ич ающи и с я тем, что, с целью повы шения быстродействия и точности, кажда пара включает в себя полюсы с взаимно перпендикглярным направлением зубцов. 2.Двигатель по п.1, отличающийся тем, что, с целью увеличения удельного усилия, каждый иэ полюсов выполнен Ul-образным с расположением обмоток управления на среднем стержне и со сдвигом зубцов крайних стержней относительно зубцов среднего стержня на половину эубцового деления. 3.Двигатель non.l, отличающий с я тем, что, с целью упрощений, магнит, связывающий пару полюсов, выг полнен из двух частей, каждая из которых с одной стороны примыкает к по«.пюсу, а с другой - к общему для всех полюсов ярму. Источники информации, принятые во внимание при экспертизе 1.Патент США W 3.668.443, кл.31012,1968 г. 2.Патент США W 3.776.578, кл.34629, 1966 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Двухкоординатный линейный шаговый двигатель | 1976 |
|
SU604094A1 |
| Линейный шаговый электродвигатель | 1972 |
|
SU504278A1 |
| Линейный шаговый электродвигатель | 1984 |
|
SU1365279A1 |
| Двухкоординатный электрическийдВигАТЕль | 1979 |
|
SU849389A1 |
| Многокоординатный шаговый электродвигатель | 1982 |
|
SU1080240A1 |
| Двухкоординатный электрический двигатель | 1980 |
|
SU972637A1 |
| Многофазный линейный шаговый двигатель | 1981 |
|
SU1001349A1 |
| Двухкоординатный шаговый электродвигатель | 1983 |
|
SU1201971A1 |
/7 7
уг у5
-J3
-гг
-б
.72
76 (риг.е
